







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于驾驶行为多元时间序列特征的愤怒驾驶状态检测
[万平1, 2, 3  , 吴超仲
, 吴超仲1, 2 , 林英姿3 , 马晓凤1, 2 ]
, 吴超仲]
|
|


作者简介:万平(1984-),男,博士研究生.研究方向:驾驶行为与安全辅助驾驶.E-mail:pingw04@163.com
为了对“路怒症”进行有效干预,提出了一种基于驾驶行为的愤怒驾驶状态检测模型。在交通繁忙路段开展基于道路事件刺激的愤怒情绪诱导限时实验,获得驾驶人愤怒与中性情绪下的驾驶行为数据。运用分段线性表示方法拟合由方向盘转角与车辆横向位置组成的驾驶行为多元时间序列,并采用自底向上算法对该时间序列进行分段,提取各分段的斜率与时间间隔特征作为模型输入,建立基于支持向量机的愤怒驾驶状态检测模型。结果表明:模型的识别精度在10分段条件下达78.69%,较5分段、20分段分别高8.57%、4.85%。研究结果可为开发基于驾驶行为的愤怒情绪实时检测设备提供理论支持。
To explore effective approaches of intervention on road rage, a driving anger detection model based on driving behavior is proposed. The driving behavior data in angry and neutral states were acquired by conducting timed experiments for driving anger induction in busy traffic sections. Piecewise Linear Representation (PLR) method was used to fit multivariate time series, which consists of steering wheel angle and vehicle lateral position, and a bottom-up algorithm was implemented to separate the multivariate time series. The slope and time interval of each segment were extracted as the input features of a Support Vector Machine (SVM) model, which was used to recognize the driving anger. The validation results show that the accuracy of the proposed model with ten segments is 78.69%, which is 8.57% and 4.85% higher than that with five segments and twenty segments, respectively. This study may provide reference for the design of real driving anger detection devices based on driving behavior.
驾驶愤怒, 又称“ 路怒症” , 是指在周边车辆不良驾驶行为、行人占道与交通阻塞等情况下的开车压力与挫折导致的愤怒情绪[1]。美国国家公路交通安全管理局的统计显示, 5%~7%的美国驾驶人患有“ 路怒症” [2]。在我国, 调查显示60.72%的车主患有“ 路怒症” , 82.45%的车主遇到他人违章时会产生愤怒情绪[3]。“ 路怒症” 会显著降低驾驶人的感知、判断、决策能力, 从而使驾驶人产生各种不良或危险驾驶行为, 导致交通违规、交通事故的频频发生[4]。因此, 为了降低“ 路怒症” 对道路交通安全的影响, 有必要对驾驶愤怒情绪进行识别、干预。
目前有关情绪识别的研究主要基于面部表情、语音、姿态以及生理特征[5]。林启万[6]采用视频图像处理的手段, 提取了驾驶人眼睛与脸部面积比、嘴角连线中点与嘴唇最高点之间的高度差等几何特征, 运用阈值判别法对驾驶人的紧张与平和情绪进行了识别。Jones等[7]通过驾驶人与车内信息系统的语音交互, 提取驾驶人声音信号的频率、幅度、功率谱系数等特征来识别驾驶人的高兴、愤怒与悲伤等情绪。Kessous等[8]采用身体躯干的移动与收缩次数、手部重心的移动速度与加速度等姿态特征对被试的基本情绪进行识别。Wang等[9]提取血流量脉冲、皮肤电导率、呼吸率与皮温等生理特征, 采用因子分解模型识别驾驶人多种情绪。Katsis等[10]提取驾驶人在模拟比赛环境下的脸部肌电、心电与皮肤电活动等生理特征, 采用支持向量机(SVM)对驾驶情绪进行区分。Liu等[11]通过视频刺激被试产生积极与消极情绪, 提取相应情绪下的脑电功率谱特征, 运用SVM对这两类情绪进行识别。
综上所述, 目前的驾驶情绪都是通过室内语音、视频与模拟场景刺激产生, 与实际交通环境中产生的情绪在唤醒度和持续时间上存在偏差。其次, 目前情绪识别研究所选取的上述指标特征存在如下不足:基于视频图像处理的面部表情特征提取效果受光照、天气等环境因素影响较大; 基于声音的特征提取效果受实际交通环境中的车内外噪音影响较大; 而采集生理信号的绝大多数传感器须在人体表面贴入电极, 侵入性较强, 可能引起驾驶人不适并干扰其自然驾驶过程。再次, 目前的时域或频域特征提取方法仅孤立地提取单个变量特征而不能提取不同变量间的交互、协同特征。因此, 本文通过实车实验提取驾驶人在愤怒情绪下的驾驶行为(操作行为与车辆运动)多元时间序列特征, 建立基于SVM的愤怒情绪识别模型。
为了使被试产生更多真实的愤怒情绪, 从而有效获得愤怒情绪下的驾驶行为特征, 本课题在实际交通环境中开展实车实验。实验路线经过湖北武汉市汉口区和武昌区较为繁忙的路段, 全程53 km, 途径45个信号交叉口、59道行人斑马线以及3个大型商业区等, 见图1。在该路线上被试会经常遇到非机动车(行人)横穿马路、周边车辆加塞抢道、长时间等红灯和交通堵塞等刺激事件(见图2), 尤其在早晚高峰时间段, 这些事件的频繁出现会诱导被试产生愤怒情绪。为了提高诱导效果, 要求被试110 min内完成实验, 并根据实际完成时间进行报酬结算。
 | 图1 实车实验路线Fig.1 On-road experiment route |
 | 图2 实验中的道路事件Fig.2 Road events during experiments |
研究表明[12], 男性驾驶人遇到刺激事件时更易产生愤怒情绪, 进而引发不良或危险驾驶行为。为了增强实验效果, 本文仅选择男性驾驶人作为被试。招募了15名持有C1驾驶执照的被试, 平均年龄为43.4岁, 标准差为6.4岁; 平均驾龄为8.4年, 标准差为4.6年。每名被试除了基本实验报酬外, 按照5元/min的额度进行实验任务提前或延迟完成的奖惩结算。同时, 招募一名驾驶经验丰富的观察者, 该观察者坐在副驾驶位置上按时询问并记录被试的愤怒等级。
实验设备的主体是武汉理工大学智能交通系统研究中心的自动挡试验车(见图3)。该车具备车辆控制器局域网络(CAN), 融合了多种操作行为传感器如方向盘转动传感器、加速踏板与制动踏板传感器等。使用车道偏离预警装置MobileyeC2-270系统采集车辆在道路中的位置, 见图4。采用惯性导航系统RT2500采集车辆的速度、加速度等运动特征, 见图5。另有3台高清摄像机(见图6)分别记录前方道路环境(刺激事件)、被试的面部表情(语音)和驾驶操作行为。该记录可辅助判断被试的愤怒驾驶状态。
 | 图3 实车实验用车Fig.3 Testing car for on-road experiments |
 | 图4 MobileyeC2-270系统Fig.4 MobileyeC2-270 system |
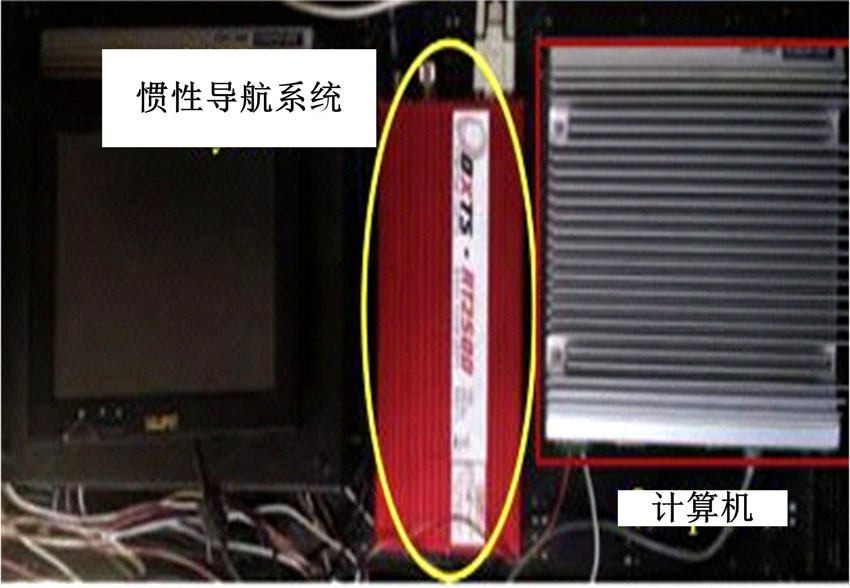 | 图5 惯性导航系统RT2500Fig.5 Inertial navigation RT2500 system |
 | 图6 视频摄像机Fig.6 Video cameras |
(1)实验前准备。登记被试的年龄、驾龄等信息并与其签订协议, 协议内容明确实验要求与报酬结算方式。例如, 被试必须在早高峰(7:00~8:00)或晚高峰(17:00~18:00)时间段内出车实验; 实验过程中不得违反任何交通规则(限速70 km/h); 所得报酬按实际任务完成时间进行奖惩结算。
(2)适应性驾驶。当调节好所有的数据采集设备并进行数据同步后, 被试须进行10 min的驾驶练习, 以适应试验车辆的操作性能与运动性能, 从而消除紧张感或不适感。
(3)正式实验。每隔2 min, 观察者向被试询问目前的情绪状态, 该状态通过5级Likert量表(1-平静, 5-暴怒)记录[13]; 而当被试遇到刺激事件时, 则立即询问其愤怒状态。同时, 被试的各种驾驶行为信号被相关传感器记录。
根据被试对其情绪的自我报告, 当其愤怒等级与前一次报告的差值小于2时, 该愤怒等级将被直接采用; 否则, 邀请驾驶经验更丰富的观察者结合被试的面部表情(语音)视频、前方道路环境视频以及被试方向盘、档位等操作视频记录对被试报告的愤怒等级进行重新评估。由于受到了报酬奖惩的刺激, 被试在实验过程中即使没遇到愤怒刺激事件, 仍可能维持较低等级(即愤怒等级2)的愤怒水平, 而当被试处于平静状态时, 根据5级Likert量表的定义, 其愤怒等级为1。因此, 当被试愤怒等级小于3时, 可认为被试处于中性驾驶状态; 当被试愤怒等级大于或等于3时, 可认为被试处于愤怒驾驶状态。
通过与被试访谈和视频统计, 发现在事件刺激后被试的愤怒状态一般持续15~60 s, 此后若无新的刺激, 愤怒情绪将会消退, 因此本文将选取上述区间的中间值, 即自事件刺激开始后的37.5 s的时间跨度内的驾驶行为数据作为分析对象。对愤怒与中性驾驶状态下的3种操作行为(制动踏板、加速踏板深度和方向盘转角)以及3种车辆运动行为(速度、加速度与车辆横向位置)进行配对样本t检验。检验结果(见表1)表明, 仅方向盘转角和车辆横向位置在愤怒与中性情绪下存在显著性差异(Sig< 0.05), 因此这两个驾驶行为指标可用来区分这两类驾驶状态。
| 表1 愤怒和中性情绪下的驾驶行为指标配对样本t检验 Table 1 Paired t-tests of driving behavior indictors between driving anger and neutral state |
2.3.1 多元时间序列定义
通过对方向盘操作信号进行分析后发现, 被试在中性情绪下会频繁且小幅度地修正方向盘, 而一旦产生愤怒情绪, 会由于认知失误(注意力分散)导致修正操作频度减少或猛烈地、大幅度地修正方向盘。此外, 被试愤怒状态一般持续15~60 s, 在这期间, 方向盘仅出现2~3次上述操作特征, 每次持续时间较短(5~10 s)。对车辆横向位置信号的分析也得到了相似的结果。因此, 若在整个愤怒时间段求取方向盘转角或车道位置标准差, 其与中性情绪下的差异性会因统计的平均作用而显著降低, 不适合愤怒驾驶状态的实时检测。
时间序列是观测变量在某时间段内连续的记录集, 具有较强的连贯性与规律性, 可快速反映变量的变化趋势与特征, 因此, 驾驶行为时间序列特征可用来实时检测驾驶人情绪变化。而多元时间序列分析可提取不同变量间的交互与协同特征, 它能克服一般时域或频域特征提取方法只能孤立地提取单个变量特征的缺陷。假设xm(t), (m=1, 2, …, n; t=1, 2, …, i)表示在t时刻第m个观测变量的值, 则由n个观测变量全时刻组成的多元时间序列为:
式中:等式左边表示m个观测变量; 右边的每行表示某个观测变量的一元时间序列, 每列表示某时刻所有变量的观测值。
由方向盘转角和车辆横向位置组成的多元时间序列为:
式中:d(j)(j=1, 2, …, i)为车辆在j时刻的横向位置; φ (j)(j=1, 2, …, i)为j时刻的方向盘转角。
2.3.2 多元时间序列的分段线性表示与分割
实际应用中传感器记录的多元时间序列都是高维与海量的, 为了快速提取时间序列的有效特征, 本文采用分段线性表示法(Piecewise linear representation, PLR)。PLR具有数据压缩度高、形式直观、噪声过滤效果好和较快的数据相似性搜索等特点[14]。PLR将时间序列沿时间轴分成m个子段, 将每个子段的2个端点采用直线段连接。设时间序列X(t)={x1, x2, …, xn}, 则其PLR模式为:
式中:wj为原时间序列经过分段线性表示后的第j个子段, 对应的时间区间为[wj-1, wj]; fj(t, wj)为连接wj两个端点的线性函数; ej(t)为该子段的原时间序列与其线性表示之间的拟合误差。
假设第j个子段为Tj={x(wj-1), x(wj-1+1), …, x(wj)}, 相应地, 该段经过线性插值后的时间序列为:
则第j个子段的线性表示序列和原序列之间的拟合误差ej与全部子段的拟合误差E计算如下:
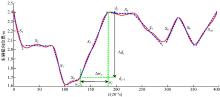
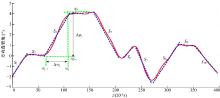
为了使原时间序列和其线性表示之间的误差尽可能小, 关键在于每个子段两个端点, 即分割位置的确定。在实际应用中, 可运用“ bottom-up” 算法对多元时间序列进行分割。该算法首先让时间序列上任意相邻两点组成最小分段, 接着计算两个相邻分段合并后产生的拟合误差, 再将误差最小的两相邻段合并, 直至该误差大于指定阈值[15]。例如, 方向盘转角与车辆横向位置组成的多元时间序列的长度为20 s(采样频率为20 Hz), 依据“ bottom-up” 算法将其划分为10段, 即多元时间时间序列
被划分为10段, 如图7和图8所示。从图7可以看出, 车辆横向位置时间序列的10个互不重复的子段分别为S1(1, 16), S2(17, 80), S3(81, 102), S4(103, 132), S5(133, 191), S6(192, 241), S7(242, 292), S8(293, 324), S9(325, 353)和S10(354, 400)。从图8可以看出, 方向盘转角时间序列的10个互不重复的子段分别为S1(1, 33), S2(34, 65), S3(66, 116), S4(117, 169), S5(170, 215), S6(216, 246), S7(247, 282), S8(283, 326), S9(327, 356)和S10(357, 400)。
 | 图7 车辆横向位置时间序列分段线性表示结果Fig.7 PLR results of time series of vehicle lateral position |
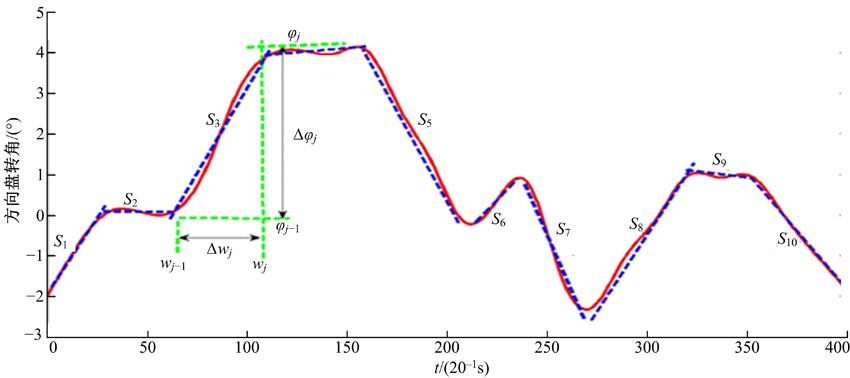 | 图8 方向盘转角时间序列分段线性表示结果Fig.8 PLR results of time series of steering wheel angle |
2.3.3 多元时间序列的特征提取
采用PLR方法将车辆横向位置和方向盘转角组成的多元时间序列分为m段, 即:
式中:[
对于每个被线性拟合的子段, 可提取其斜率与时间间隔为驾驶情绪识别的特征, 则所有子段组成的特征序列为:
式中:
依据公式(9)(10)(11), 图7和图8显示的多元时间序列的特征矩阵为:
式中:
2.3.4 多元时间序列特征统计分析
考虑到时间序列的不同子段数目的分段线性表示, 可能会影响驾驶行为特征的提取效果, 本文分析了愤怒和中性情绪下的驾驶行为(方向盘转角和车辆横向位置)时间序列在5、10和20个子段划分下的线性拟合斜率的统计特征, 见表2、表3。
从表2和表3可以看出, 愤怒情绪下车辆横向位置和方向盘转角时间序列的分段线性表示的斜率均值、标准差、极差(最大值-最小值)均比中性情绪下的大, 表明愤怒情绪会使驾驶人方向盘操作不均匀, 波动较大, 导致车辆的运动状态不稳定, 增加了驾驶风险。方差分析结果进一步表明, 对于3种分段方法, 愤怒情绪下的驾驶行为时间序列的线性表示的斜率的标准差均明显比中性情绪下的大(P< 0.05), 且在子段数为10下的差异最为显著(P> 0.03); 而两种情绪下的驾驶行为时间序列的分段线性表示的斜率的均值没有显著性差异(P> 0.05), 如表4所示。对于同种驾驶情绪, 分段数对线性表示的斜率有一定影响, 但影响并不显著。
| 表2 车辆横向位置时间序列分段表示斜率的描述统计 Table 2 Descriptive statistics of slopes of vehicle lateral position |
| 表3 方向盘转角时间序列分段表示斜率的描述统计 Table 3 Descriptive statistics of slopes of steering wheel angle |
| 表4 愤怒和中性情绪下的驾驶行为时间序列分段表示斜率差异的显著性分析结果 Table 4 Significant difference analysis results of slopes for driving behaviors between anger and neutral state |
支持向量机(SVM)是一种能较好地解决小样本、非线性及高维模式识别问题的分类方法。SVM可通过适当的核函数将原始空间里线性不可分的输入向量映射到高维空间, 然后在高维空间求解最优分类超平面[16]。本文在LibSVM环境下, 建立SVM分类器, 采用的核函数为径向基函数(Radial basis function, RBF):K(xi, xj)=exp{-‖ xi-xj‖ 2/2g2}。对于决定SVM分类效果的核函数, 其功能与惩罚系数C和RBF的系数g关系密切, 本文采用5折交叉验证和网格搜索的方法来优化这两个参数。将车辆横向位置和方向盘转角时间序列的分段线性表示的斜率和相应的时间间隔共4个特征作为SVM分类器的输入, 将驾驶人的情绪状态(愤怒或中性)作为模型的输出。从所有被试里选取450个样本(愤怒与中性样本各半)作为训练集, 另选150个样本作为测试集。基于SVM的愤怒驾驶状态检测流程如图9所示。
 | 图9 基于SVM的愤怒驾驶状态检测流程Fig.9 Driving anger detection process based on SVM |
针对驾驶行为多元时间序列不同子段数(5、10和20)的分段线性表示, 本文建立的SVM分类器的相关参数训练优化结果见表5。
| 表5 基于不同分段数的SVM核函数参数优化结果 Table 5 Optimal parameters of SVM for different numbers of segments |
为了分析不同子段数对SVM分类器分类效果的影响, 本文引入3个评价指标, 即查全率(Recall)、查准率(Precision)和正确率(Accuracy), 定义如下:
式中:TP为正确判别为愤怒驾驶样本的个数; FN为错误判别为中性驾驶样本的个数; FP为错误判别为愤怒驾驶样本的个数; TN为正确判别为中性驾驶样本的个数。
运用测试样本集进行测试的结果如图10所示。从图10可以看出, 多元时间序列不同分段数的线性表示对SVM分类效果有显著影响。例如, 当分段数为10时, SVM的正确率、查全率和查准率最高, 说明过大(20)或过小(5)分段数的线性表示均不能较好地提取多元时间序列特征。
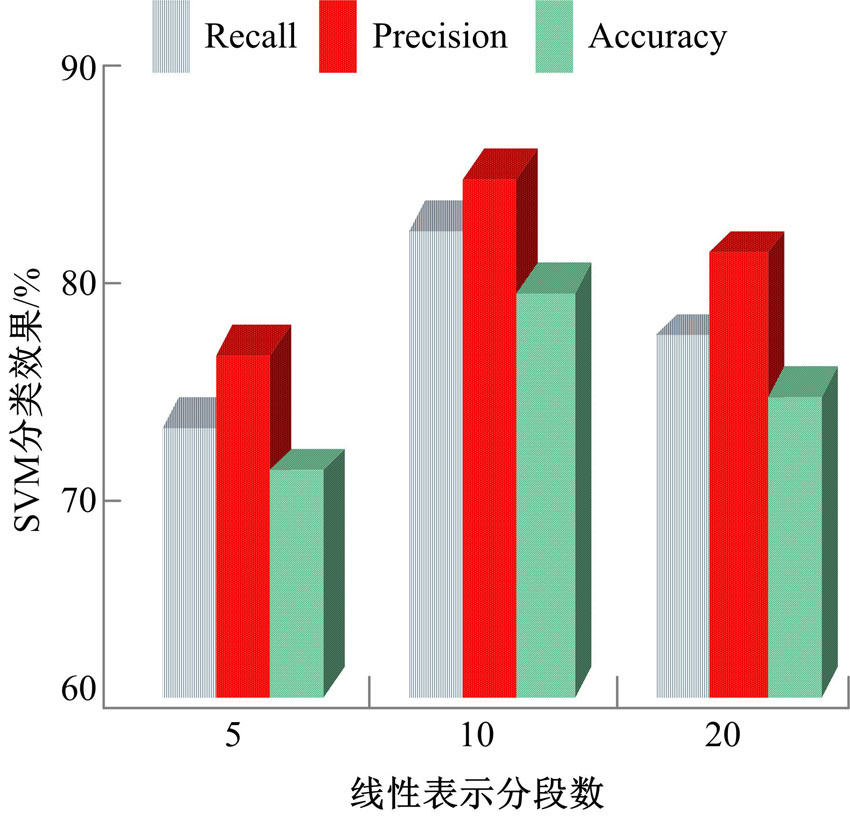 | 图10 不同分段数线性表示下的SVM分类效果Fig.10 Performance of SVM classifier for different numbers of segments |
表6为基于驾驶行为多元时间序列不同分段数线性表示特征的SVM对15名被试驾驶情绪的识别率。从表6可以看出, 基于10分段线性表示特征的平均识别率最高, 达78.69%, 比5分段和20分段的识别率分别高8.57%、4.85%。虽然本模型最高识别率比作者前期研究成果[17]低3.55%, 但文献[17]采用较为昂贵的生理传感器采集被试的生理和脑电指标, 这些生理传感器不仅佩戴麻烦, 而且其较强的侵入性会引起驾驶人不适并干扰其自然驾驶行为。此外, 对于这3种分段方法, 年轻被试愤怒状态识别率较高, 可能原因是年轻驾驶人易愤怒, 且愤怒后的驾驶行为特征变化更为剧烈。
| 表6 基于不同分段数线性表示特征的SVM识别结果 Table 6 Comparisons of recognition rate of driving anger based on SVM for different numbers of segments |
本文首先采用基于实际道路事件(周边车辆加塞、行人横穿马路等)刺激的愤怒情绪诱导方法, 克服了室内模拟环境下情绪诱导的唤醒度与持续度不足的缺陷。其次, 为了快速实时地检测出驾驶人情绪的变化, 本文运用分段线性表示方法(PLR)提取了方向盘转角与车辆横向位置组成的驾驶行为多元时间序列的特征(分段斜率和时间间隔), 并以此特征作为模型输入, 建立识别驾驶愤怒和中性情绪的SVM模型。测试结果显示, 该模型最高识别率达78.69%, 可为开发基于驾驶行为多元时间序列特征的愤怒驾驶状态检测及预警设备提供理论支持。此外, 本文的被试样本过少且尚未包含女性被试, 为了增强模型的可靠性与适用性, 今后可增加被试数量, 尤其女性被试的数量。同时, 本文测试结果显示, 基于10分段线性表示特征的平均识别率比较小分段数(5)和较大分段数(20)的识别率高, 表明选择合适分段数的线性表示时间序列对模型的识别效果影响较大, 今后可对确定分段数的自适应算法进行探索。其次, 本文仅对中性和愤怒情绪驾驶状态进行了识别, 未来可对不同愤怒强度的驾驶状态进行识别。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|