
{kind=link}
{kind=link}
{kind=link}
{kind=link}
具有测量时滞的不确定系统的递推鲁棒滤波
引用本文
冯建鑫. 具有测量时滞的不确定系统的递推鲁棒滤波. 吉林大学学报(工学版), 2017, 47(5): 1561-1567
FENG Jian-xin. Recursive robust filtering for uncertain systems with delayed measurements. Journal of Jilin University Engineering and Technology Edition, 2017, 47(5): 1561-1567
Doi:10.13229/j.cnki.jdxbgxb201705031FENG Jian-xin. Recursive robust filtering for uncertain systems with delayed measurements. Journal of Jilin University Engineering and Technology Edition, 2017, 47(5): 1561-1567
Permissions
Copyright©2017, 吉林大学学报编辑部
版权所有.吉林大学学报编辑部
具有测量时滞的不确定系统的递推鲁棒滤波
作者简介:冯建鑫(1982-),男,副研究员,博士.研究方向:鲁棒滤波与数据融合,伺服控制.E-mail:fengjx774@163.com
摘要
针对模型参数随机不确定性和测量时滞现象,提出了一种基于垂直投影定理和新息分析的递推鲁棒滤波方法。该方法首先将原系统转化成一个含有跨时相关性噪声的随机不确定性系统,接着重新计算了新息,然后用数学归纳法证明所得到的新息是一个互不相关的序列,最后用新息分析和垂直投影定理获得了所期望的递推鲁棒滤波器。该滤波器设计方法不需要将跨时相关性噪声进行状态增广,因而计算量小、精度高。仿真实验验证了该方法的有效性。
关键词:
自动控制技术; 数学归纳法; 垂直投影定理; 测量时滞; 随机不确定性; 跨时相关性噪声
中图分类号:TP273
文献标志码:A
文章编号:1671-5497(2017)05-1561-07
Recursive robust filtering for uncertain systems with delayed measurements
Abstract
A recursive robust filtering method based on the orthogonal projection and an innovation analysis approach is proposed for stochastic uncertain systems with delayed measurements. First, the original system is transformed into a stochastic uncertain system with correlated measurement noises, and the innovations are recalculated. Then, by applying the mathematical induction, the newly obtained innovations are proofed to be uncorrelated with each other. Finally, the desired recursive robust filter is designed via an innovation analysis approach and the orthogonal projection theorem. Without resorting to state augmentation, the proposed filter treats the noise correlated across time directly. Therefore, the desired filter has less computational burden, but a high computational accuracy. Simulation results demonstrate the effectiveness of the proposed approach.
Key words:
automatic control technology; mathematical induction; orthogonal projection theorem; delayed measurement; stochastic uncertainty; noises correlated across time
0 引 言
卡尔曼滤波理论自诞生之初便广泛应用于航空航天和信号处理等军事及民用领域[1, 2]。它建立在精确数学模型之上, 并要求传感器测量信息实时可得。然而, 在实际中, 目标系统和系统模型之间的参数误差不可避免, 这也是模型参数不确定性始终是控制和滤波问题的一个研究热点的重要原因。模型参数不确定性的种类很多, 乘性噪声作为模型随机不确定性的重要一类广泛存在于航空航天、无线电通信传输等领域[3, 4]。由于依赖于目标系统状态, 乘性噪声的二阶统计特性往往无法获得, 这也为相应滤波器和控制器的设计带来困难。目前为止, 国内外学者在含乘性噪声的随机动态滤波器和控制器设计上做了不少工作形成了包括基于game理论和线性矩阵不等式等的研究方法[5, 6]。
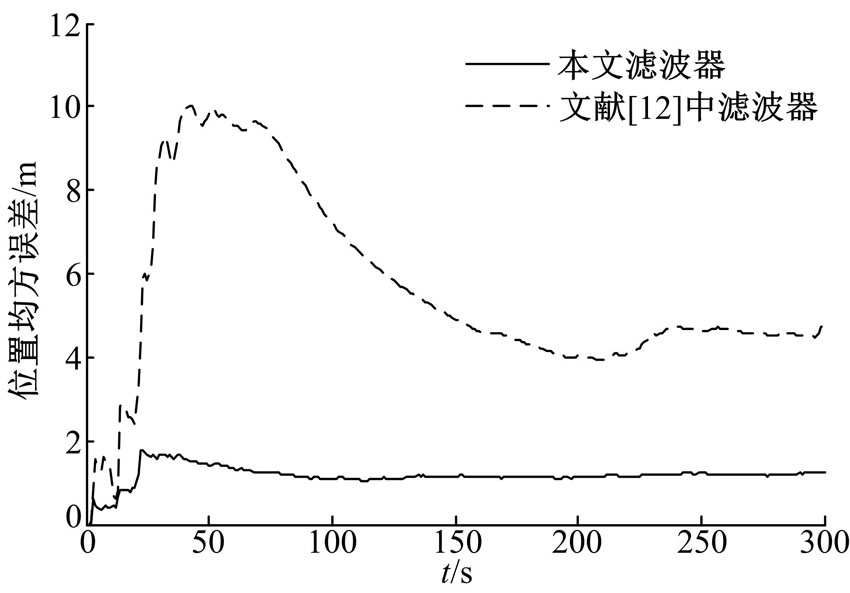
随着网络技术的发展, 网络广泛应用于控制和滤波领域[7, 8, 9]。在网络系统当中, 传感器测量得到的数据通过网络进行传输, 由于带宽等一系列原因, 数据在传输过程中将不可避免产生时滞。Liu等[10]将本质为随机时变的网络时滞现象描述为确定性时滞。针对这种情况, Yaz等[11]应用一个已知概率的伯努利分布序列来描述这类网络时滞现象, 并在此模型基础上, Yaz设计了一个线性无偏滤波器。然而文献[11]得到无偏滤波器是次优的, 因为状态向量增广中产生的跨时相关性有色噪声仍被当成互不相关的白噪声来处理。Wen等[12]利用将跨时相关性噪声进行状态增广的方法得到了一个最优线性滤波器, 然而系统维数的增大必将带来沉重的计算负担, 并且将噪声当成状态进行估计本身就是件困难的事情, 很难进一步提高系统估计精度[8, 9, 13], 另外Wen等得到的滤波器非递推, 计算时需占用较大内存。
鉴于以上分析, 本文在前人工作基础上进一步研究了测量时滞随机不确定性系统的递推鲁棒滤波器设计。新获得的递推鲁棒滤波器依赖于数学归纳法, 新息分析和垂直投影定理; 对跨时相关性噪声采用直接处理逐步分析的方式。最后, 仿真实验验证了本方法的有效性和优越性。
1 问题阐述
考虑下面含有传感器测量信息时滞和乘性噪声的随机参数动态系统:
式中:
式中:β k∈
注释1:时滞模型(2)(3)在文献[11]、[12]和[13]等中得到了广泛的应用。该模型的优势在于意义明确、结构简单, 而且上一步的测量包含了最接近本次测量的有用信息, 滞后性相对较小。
通过定义
系统(1)~(3)可以表示成如下紧凑形式:
式中:vk为辅助系统(6)(7)的测量噪声, 由式(5)可知, vk均值为0, 并具有如下的统计特性:
式中:矩阵Rk、Rk, k-1和Rk, k+1满足下式:
由式(8)能够看到, 测量噪声vk不再是零均值的白噪声, 而是一个跨时自相关的有色噪声。具体来说就是, k时刻的测量噪声与k+1和k-1时刻的测量噪声相关, 其协方差矩阵分别为Rk, k-1和Rk, k+1。
对于跨时相关性噪声, 传统的处理方法是进行状态向量的增广, 将跨时相关性噪声作为状态的一个分量来进行估计。然而, 系统维数的进一步增大, 必然带来计算量的增加; 另外将噪声作为状态的一个分量进行估计也很难得到较高的精度, 噪声的估计误差势必将降低整个系统状态的估计精度。因此, 本文在接下来对于辅助系统(6)(7)的滤波器设计中没有采用状态向量增广的方法, 而是采用了基于垂直投影定理的新息分析的方法。这种方法的优点是新息构成一个互不相关的序列, 物理意义明确, 便于分析和设计计算。
2 递推鲁棒滤波器设计
在进行递推鲁棒滤波器设计之前, 首先引入下面的引理, 这对简化滤波器设计非常有用。
引理1 对于辅助系统(6)(7)中出现的随机参数矩阵Ck和Dk, 有如下结论:
式中:矩阵
证明:式(10)可由式(4)和式(5)得到。证毕
引理2 状态乘积的期望矩阵Xk=E{xk
式中:diag(· )表示对角线矩阵,
证明:引理2可由式(5)(6), 系统状态的初始条件以及随机不确定性与过程噪声互不相关的特性直接得到。证毕
在传统的卡尔曼滤波理论中, 新息ε k有如下的计算形式:
式中:向量
根据垂直投影定理, 用来进行滤波计算的测量向量一步预测有如下计算形式:
式中:
将式(14)代入到式(13), 有:
进而, 新息ε k可计算如下:
新息的初始值取为ε 1=y1。
引理3 测量噪声vk与新息ε j, 1≤ j≤ k-2互不相关, 即下式成立:
证明:用数学归纳法证明, 当j=1时有:
由于j≤ k-2, 有k≥ 3。测量噪声一步跨时自相关并与系统状态不相关, 因此期望E
由于i≤ k-3, 根据假设, 期望E{ε i
引理4 式(16)得到的新息是一个互不相关的序列, 即下式成立:
证明:不妨假设l> j, 则p=l-j≥ 1。下面将用数学归纳法来证明引理4。当k=2时, 有l=2, j=1。因此, 式(20)可计算如下:
在k=q-1时, 假设式(20)成立。要想来证明引理4是成立的, 只需证明引理4在k=q时成立。这里分p=1和p> 1两种情况来进行证明。当p=1时, 有:
由于l=j+1≤ q, 有j≤ q-1。当k=q-1时, 式(20)成立, 因此期望E{ε i
式中:期望E{vj+1
根据引理3, 期望E
将式(25)代入式(22), 可得E
当p> 1, 由式(15)有:
由于l=j+p≤ q, 有j+p-1≤ q-1, j≤ q-p< q-1。在k=q-1时, 式(16)成立, 因此期望E{ε i
又由于p> 1, 根据引理3, 期望E{vj+p
下面用一个定理来完成滤波器的设计。
定理1 对于系统(6)(7), 有下面的递推鲁棒滤波器:
式中:Ξ k是新息与系统状态乘积的数学期望; 矩阵Xk是如引理2所示的状态乘积的数学期望; Pk|k和Pk|k-1是系统估计和一步预测的误差协方差矩阵;
证明:根据新息分析和垂直投影定理, 系统状态的一步预测可计算如下:
因此一步预测误差
式中:
应用垂直投影定理, 状态估计
式中:期望Ξ k和新息均方值Π k有如下的计算形式:
测量噪声与状态不相关, 因此E
考虑到测量噪声是一步跨时自相关, 有:
根据式(25), 引理1, 引理2和引理3, 式(41)中期望可计算如下:
将式(42)~(44)代入到式(41), 可得式(33)。
由式(6)和式(37), 估计误差
由式(44), 估计误差协方差Pk|k可计算如下:
根据引理4, 可得期望E
本节利用新息分析和垂直投影定理完成了递推鲁棒滤波器的设计。新的滤波器与卡尔曼滤波器在形式上的不同主要体现在式(29)和式(32)~(34)上。而这些不同是由系统模型参数随机不确定性和测量信息在传输中出现的随机时滞所造成。也正是这些不同构成了本文所得到的递推鲁棒滤波方法与传统卡尔曼滤波方法的区别。另一方面, 定理1处理的是一个维数为2n的系统, 而传统的将跨时相关性噪声进行增广的方法需要处理一个维数为2n+2m的系统, 因此定理1得到的滤波器具有更小的计算复杂度。另一方面定理1得到的是一个递推滤波器, 相对于传统的非递推形式更容易实时的在线计算。
注释2:文献[14]研究了具有测量丢失现象和相关性噪声的随机非线性不确定系统的最优滤波问题。与文献[14]相比, 本文则研究了具有测量时滞现象的随机不确定性系统的递推鲁棒滤波问题; 在获得所期望滤波器的同时, 对于新得到的新息之间的不相关性本文也给出了严格的数学证明; 在技术途径方面, 本文不但应用了新息分析, 还应用了垂直射影定理和数学归纳法。
3 仿真计算
接下来, 将定理1得到的滤波器应用到下面的二阶目标追踪系统:
式中:τ 是采样周期;
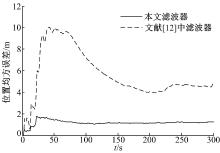
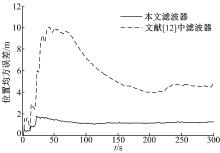
系统采样周期为τ =0.1 s, 系统初值假设为
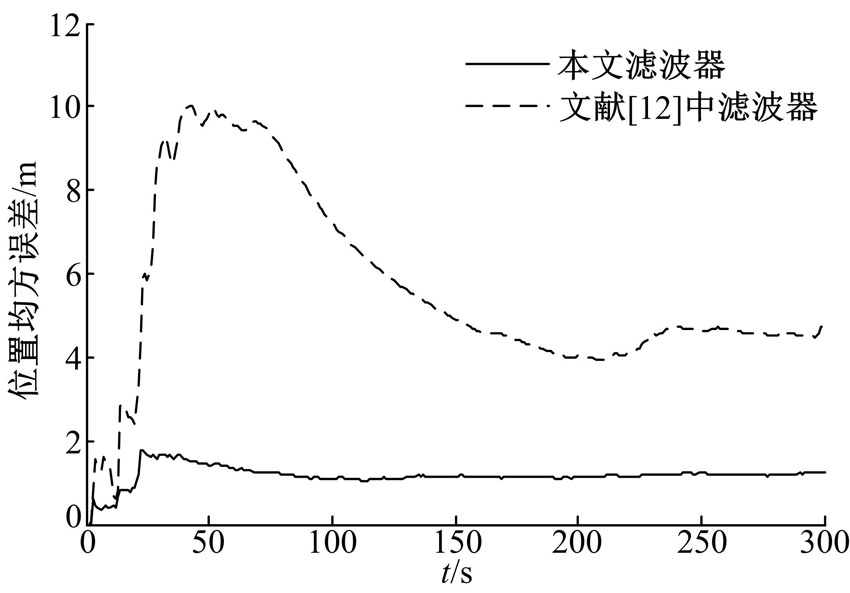 | 图1 位置误差比较(β k=0.1)Fig.1 Comparison of positional error(β k=0.1) |
 | 图2 速度误差比较(β k=0.1)Fig.2 Comparison of velocity error(β k=0.1) |
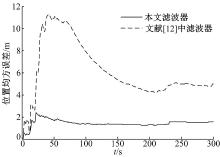
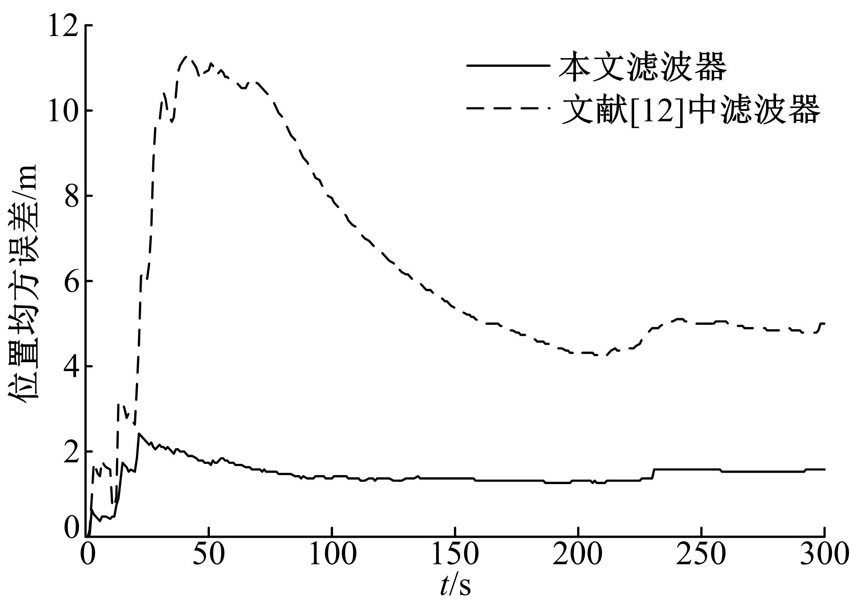 | 图3 位置误差比较(β k=0.2)Fig.3 Comparison of positional error(β k=0.2) |
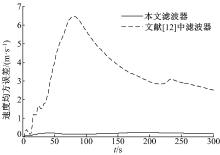
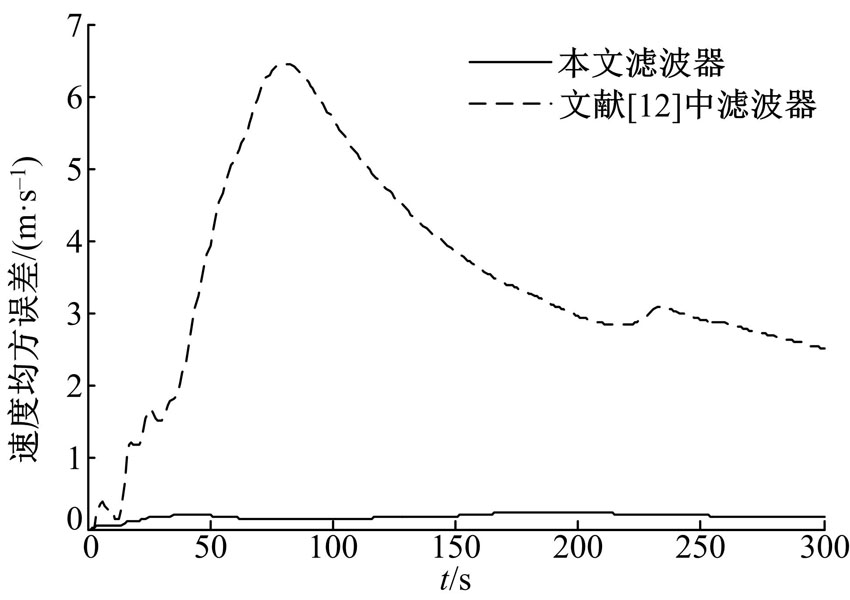 | 图4 速度误差比较(β k=0.2)Fig.4 Comparison of velocity error(β k=0.2) |
4 结束语
针对系统中出现的测量信息传输过程中产生的时间延迟和模型参数的随机乘性不确定性, 设计了基于垂直投影定理的递推鲁棒滤波器。滤波器设计思路是:用伯努利序列来描述测量数据传输时滞, 系统参数的不确定性描述成一个乘性噪声, 接着将原系统转化成为一个含跨时相关性噪声的随机参数不确定性系统, 然后重新计算了新息, 并用数学归纳法证明了所得到的新息是一个互不相关的序列, 在此基础上, 利用新息分析和垂直投影定理得到了所期望的递推鲁棒滤波器。与传统的方法相比, 本文对跨时相关性噪声的处理不需要进行状态的增广, 因而计算量小, 估计精度高, 并且所得到的鲁棒滤波器具有递推形式, 因而更加合适于在线实时计算, 仿真结果也验证了该方法的有效性。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|