


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于液力缓速器换挡控制的半挂汽车列车制动稳定性
[何仁 , 陈珊珊]
, 陈珊珊]
, 陈珊珊]
|
|


作者简介:何仁(1962-),男,教授,博士生导师.研究方向:汽车机电一体化技术.E-mail:heren@ujs.edu.cn
针对液力缓速器改变半挂汽车列车车轮制动力分配会影响制动稳定性的问题,提出了一种液力缓速器换挡控制策略。根据牵引车后轴车轮与半挂车车轮的转速关系,对液力缓速器工作挡位进行主动调控。以半挂汽车列车车轮最佳抱死顺序为控制目标,采用Matlab/Stateflow设计换挡控制策略,并与半挂汽车列车整车动力学Matlab/Simulink模型联合仿真,分别模拟直线制动车轮抱死情况和直线制动受侧向力时的横向运动情况。仿真结果表明:本文换挡控制策略能使半挂汽车列车保持最佳抱死顺序,减小在部分路面上的制动距离,并且提高汽车列车直线行驶制动受侧向力作用时的横向稳定性。
The hydraulic retarder may change the distribution ratio the braking power of the tractor-semitrailer that negatively affects the braking stability. To solve this problem, a gear-shifting strategy of the hydraulic retarder is proposed. The strategy is designed to actively change the gear of the hydraulic retarder based on the relationship between the rear wheel of the tractor and the wheel of the semitrailer. With goal to optimize the locking sequence of the tractor-semitrailer, the Matlab/Stateflow is applied to design the gear-shifting strategy. Then this strategy is associated with the dynamic model of the tractor-semitrailer built with Matlab/Simulink to study the braking sequence during straight braking and the lateral motion during straight braking with lateral force. Simulation results show that the proposed strategy can help keep the optimum braking sequence, decrease the braking distance on the road with particular tire-road adhesion and improve the lateral stability of the tractor-semitrailer.
为了提高制动安全性和可靠性, 《机动车安全运行技术条件》[1]中指出, 总质量大于等于12 000 kg的货车和专用作业车、危险货物运输车, 应装备缓速器或其他辅助制动装置。但是在半挂汽车列车上装配液力缓速器后, 牵引车后轴车轮所受制动力矩是液力缓速器与摩擦制动器制动力矩的叠加。由于液力缓速器制动力矩与传动轴转速的平方成正比, 半挂汽车列车各轮制动力之比在制动过程中是不断变化的, 导致车轮抱死顺序发生改变。如果牵引车后轮先抱死, 半挂汽车列车就可能会发生折叠失稳。迄今为止, 研究汽车列车制动稳定性的文献很多。文献[2]提出了一种基于滑移率的制动力分配算法, 根据牵引车前轮滑移率控制牵引车后轮和半挂车车轮滑移率, 保证牵引车前轮先抱死, 以提高车辆的制动稳定性。文献[3]根据牵引车的实际横摆角速度与目标值之间的误差, 实施主动制动, 可预防半挂汽车列车在低附着路面上发生折叠。另外, 针对装备有缓速器的单体车制动问题的研究也取得了丰富的成果。文献[4]建立了装备有缓速器的单体汽车的制动力与广义I曲线匹配的定性和定量评价法来评价制动稳定性。文献[5]提出了将电涡流缓速器输出的制动力矩进行调节并加载在单体车后轮的方法, 改善了车辆的制动稳定性。文献[6]提出安装缓速器的单体车辆需要重新调整制动力分配比。但是在现有研究中, 针对半挂汽车列车装备缓速器带来的制动稳定性问题的研究相对较少。文献[7]提出一种通过控制器使半挂车预先制动, 从而实现牵引车和半挂车联合辅助制动的设计方案。文献[8]指出威伯科研发的产品EBS会优先采用缓速器给牵引车后轴提供制动力, 减少牵引车后轴摩擦制动器摩擦片的磨损, 同时EBS系统会调节制动气室的压力, 使车轮滑移率保持最佳。在国外, 汽车列车上早已安装EBS系统, 但是EBS价格昂贵, 国内汽车列车鲜有安装, 且由于WABCO, KONRR等企业实行技术封锁, 无法获得EBS系统中相关的核心技术。
为此, 为了在提高半挂汽车列车的制动稳定性的同时降低产品成本, 本文拟利用一种新的液力缓速器换挡策略帮助半挂汽车列车在制动过程中实现最佳抱死顺序, 以提高半挂汽车列车的制动性能。
半挂汽车列车的结构参数如表1所示。半挂汽车列车在水平、干燥、硬实的路面上满载制动, 忽略空气阻力, 转向盘转角取0, 只考虑车辆行驶方向速度变化; 将牵引车多驱动轴和半挂车多轴各简化成一根轴, 且地面作用于车轮的法向力经过车轴中心。
(1)整车纵向动力学方程
式中:
(2)车轮转动动力学方程
式中:ω 1为牵引车前轮转速, rad/s; ω 2为牵引车后轮转速, rad/s; ω 3为半挂车车轮转速, rad/s; J1、J2分别为牵引车前轮和后轮的转动惯量, kg· m2; J3为半挂车车轮转动惯量, kg· m2; Tb1、Tb2分别为牵引车前轮和后轮制动器的制动力矩, N; Tb3为半挂车车轮制动器的制动力矩, N; Tr为液力缓速器作用在车轮上的制动力矩, N· m。
(3)车轮垂直载荷
轮胎的垂直载荷由静态载荷和动态载荷组成, 其中动态载荷由车辆在纵向加速度引起的。轮胎的垂直载荷可表示为:
式中:
| 表1 半挂汽车列车参数 Table 1 Parameters of tractor-semitrailer |
采用基于双指数模型的纵向附着系数计算模型[9]:
式中:
根据式(8)对a进行迭代求解时, 当
式中:μ xp为峰值附着系数; Sxm为峰值附着系数对应的车轮滑移率; μ xs为车轮完全滑移时路面附着系数;
由于半挂汽车列车气压制动管路较长, 摩擦制动器制动力矩响应存在时间延迟, 因此将制动力增长时间作为气压制动响应延迟的输入因素, 可表示为:
式中:Pmt为制动气室压力, MPa;
凸轮型鼓式制动器制动力矩可表示为[10]:
式中:Tb为制动力矩, N· m; Bf为制动鼓的制动因数;
半挂汽车列车采用某款液力缓速器。该液力缓速器分为5挡, 分别是恒速挡、一挡、二挡、三挡和四挡, 其中液力缓速器的一挡~四挡的充液率分别为25%、50%、75%、100%。该液力缓速器能提供的最大制动力矩为4000 N· m, 制动转矩
式中:nr为转子转速, r/min; qc为充液率。
文献[12]以曲线
待优化参数是制动器制动力分配系数β 1 、β 2 、β 3, 三者满足关系:β 1+β 2+β 3=1。本文仅考虑半挂汽车列车满载时的制动器制动力分配情况。
当各轮利用附着系数曲线φ j-z接近于直线φ -z时, 整车制动效能最佳, 因此, 可用曲线与直线在对应制动强度下的两曲线之差的均方根最小作为目标函数:
式中:
对于半挂汽车列车而言, 不同车轮抱死顺序将带来不同的制动安全问题。牵引车前轮先抱死时, 汽车将失去转向能力, 如果受到侧向力干扰, 汽车可能出现跑偏, 但是可通过操纵制动踏板及加速等方式恢复转向性能; 牵引车后轮先抱死时, 可能出现折叠现象, 此时车辆无法恢复稳定行驶状态, 处于危险工况; 半挂车车轮先抱死时, 可能出现甩尾现象, 但是也可通过操纵制动踏板及加速等方式恢复稳定行驶状态。根据车辆制动时的可控制性, 以上3种情况的危险程度由高到低依次为折叠、甩尾和失去转向能力。因此当车轮无法同时抱死时, 理想的抱死顺序为牵引车前轮、半挂车车轮和牵引车后轮[13], 要使半挂车得到最佳抱死顺序, 约束条件可写为[12]:
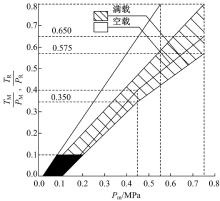
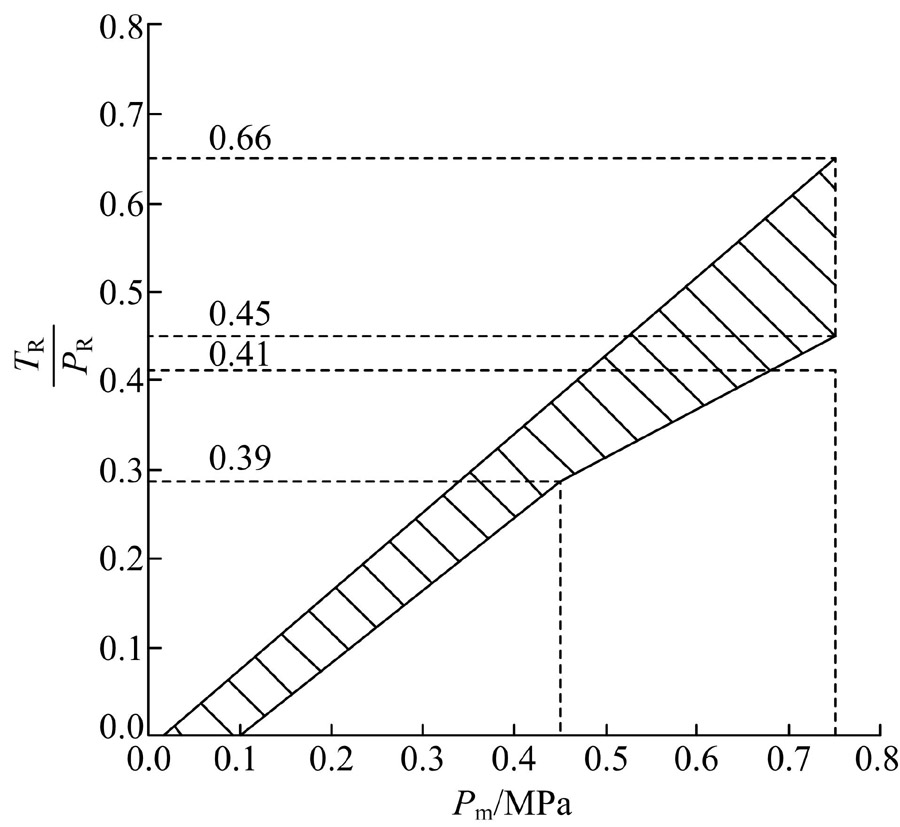
ECE制动法规对制动力在车轴之间的分配及牵引车与挂车之间的制动协调性都有要求[14]。满载和空载下, 牵引车轴上的制动器制动力与其静载荷之比TM/Pm与制动控制阀出口气压Pm的关系不能超过图1中的阴影范围, 标准满载半挂车轴上的制动器制动力与其静载荷之比
修正系数
式中:P为半挂车质量, kg; PRmax为满载半挂车轴静载荷, N。
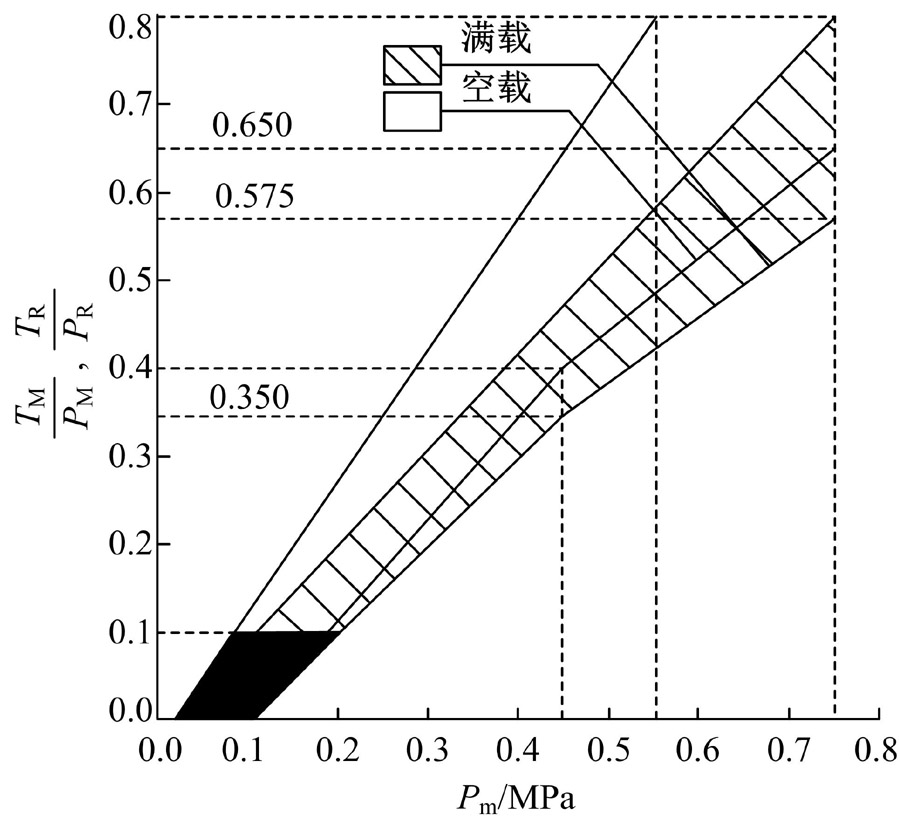 | 图1 牵引车制动器制动力要求Fig.1 Requirements of brake force of tractor |
 | 图2 半挂车制动器制动力要求Fig.2 Requirements of brake force of semitrailer |
为了使满载半挂汽车列车满足制动协调性要求, 约束条件可写为:
式中:Kc为满载修复系数(P取半挂车满载质量)。
由此, 半挂汽车列车制动器制动力分配系数的选择可归结为求解下列优化模型:
此模型为有约束的线性规划, 采用Matlab-Fmincon求解器进行求解。
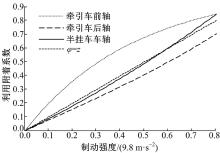
半挂汽车列车的结构参数如表1所示, 代入优化模型中求解。优化结果为
与制动强度
 | 图3 利用附着系数与制动强度的关系Fig.3 Relationships between adhesion utilization and braking severity |
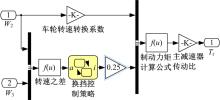
液力缓速器挡位调节模式一般分为手动操纵模式和联动操纵模式。两种模式下液力缓速器的工作挡位分别由驾驶员拨动的挡位键和制动踏板位移决定。两种情况下均受限于驾驶员的判断能力和驾驶水平, 无法根据车辆实际行驶情况做出准确的挡位选择。本文设计的液力缓速器换挡控制策略(见图4)根据牵引车后轴车轮转速与半挂车车轮转速的关系, 调节液力缓速器的挡位, 保证牵引车后轴车轮转速始终大于半挂车车轮转速, 从而实现了半挂车车轮先于牵引车后轴车轮抱死的目标。
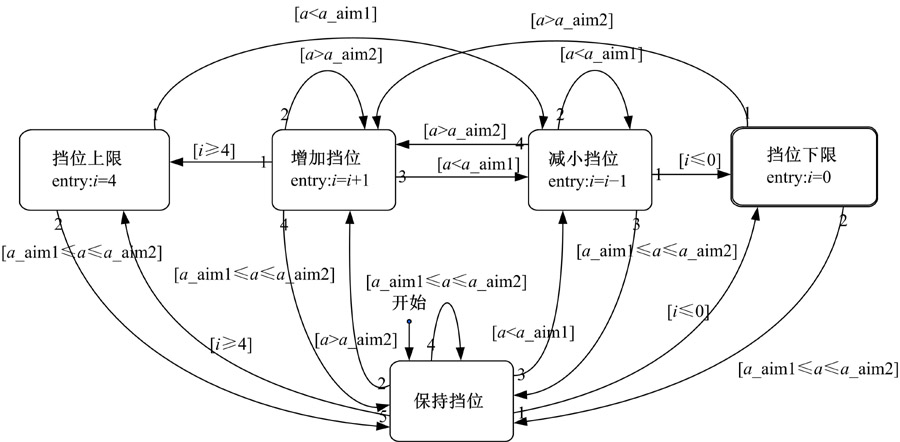 | 图4 液力缓速器控制策略Fig.4 Gear-shifting strategy of hydraulic retarder |
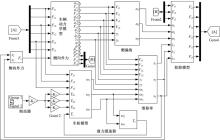
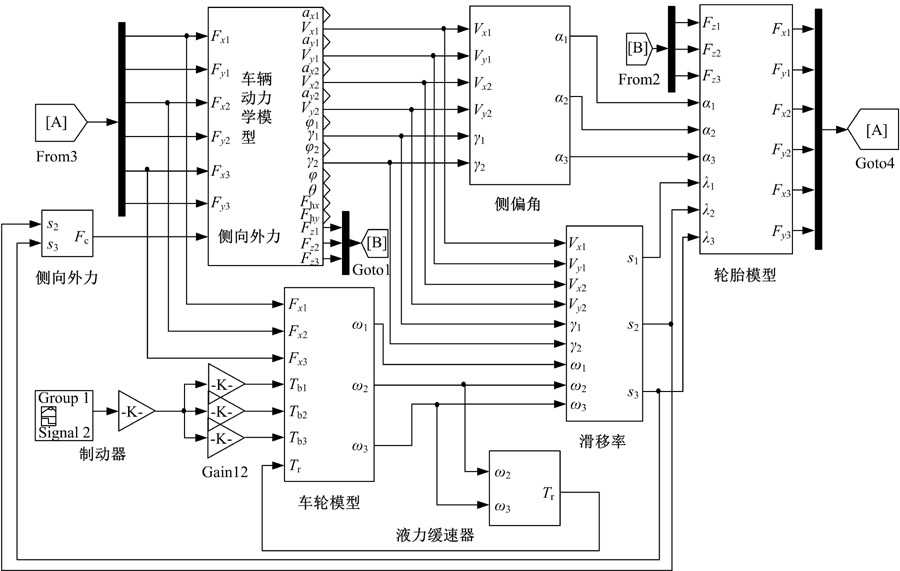
根据式(17)和液力缓速器换挡控制策略建立如图5所示的液力缓速器仿真模型。根据式(1)~(16)和图5所示的液力缓速器仿真模型, 建立如图6所示的半挂汽车列车整车制动仿真模型。
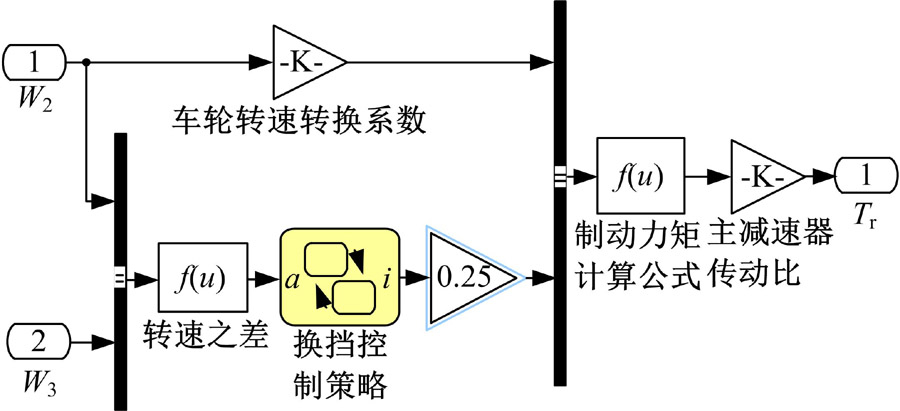 | 图5 液力缓速器仿真子模块模型Fig.5 Simulated model of hydraulic retarder |
如图4所示, 采用Matlab/Stateflow设计的换挡控制策略, 这个模块包括5个状态, 分别为保持液力缓速器挡位、减小液力缓速器挡位、增加液力缓速器挡位、液力缓速器挡位上限和液力缓速器挡位下限。仿真开始时, 液力缓速器挡位默认状态为最高挡(四挡), 如果牵引车后轴车轮转速与半挂车轴车轮转速之差
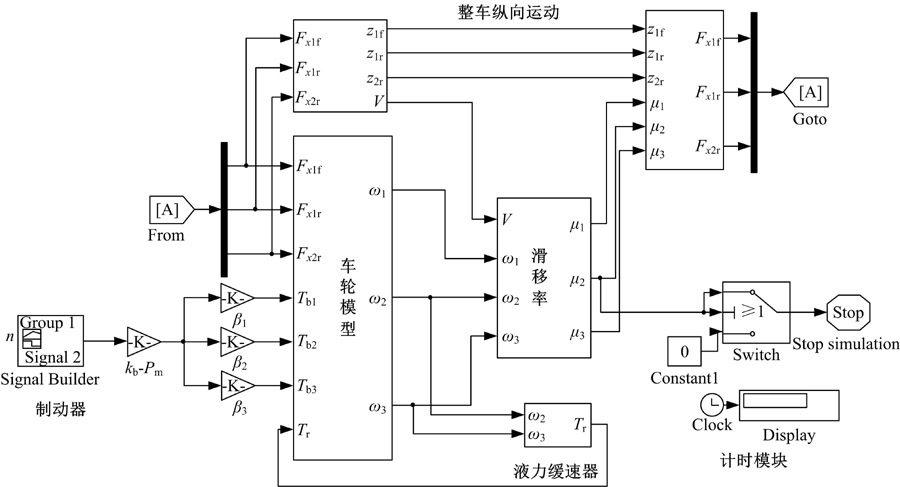 | 图6 半挂汽车列车整车仿真模型Fig.6 Brake simulated model of tractor-semitrailer |
现有研究中, “ I-β ” 分析法只能分析车轮即将抱死情况下的制动稳定性, 而液力缓速器在驱动轴抱死时不产生制动力矩, 所以该分析方法不能体现液力缓速器产生的制动力矩对半挂汽车列车各轮抱死顺序的影响; 附着系数法也是建立在车轮即将抱死的前提下, 同样不适用于分析液力缓速器对半挂汽车列车抱死顺序的影响。本文通过仿真得到的各轴车轮抱死时间点来简单、直观地展现液力缓速器对半挂汽车列车抱死顺序的影响。
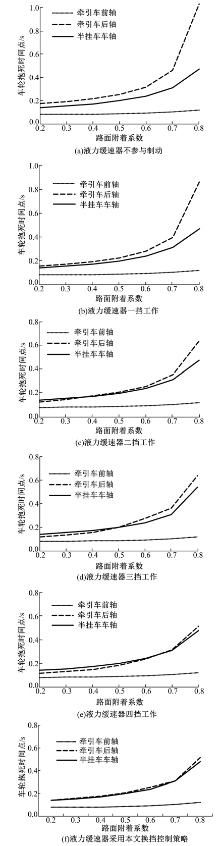
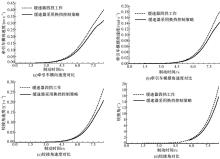
按照GB7258— 2012的要求[1], 设定该满载半挂汽车列车的制动初速度为60 km/h, 将摩擦制动器制动力矩参数设置成制动强度为0.85对应的数值, 仿真得到不同制动工况下各轮抱死时间点图, 如图7所示。
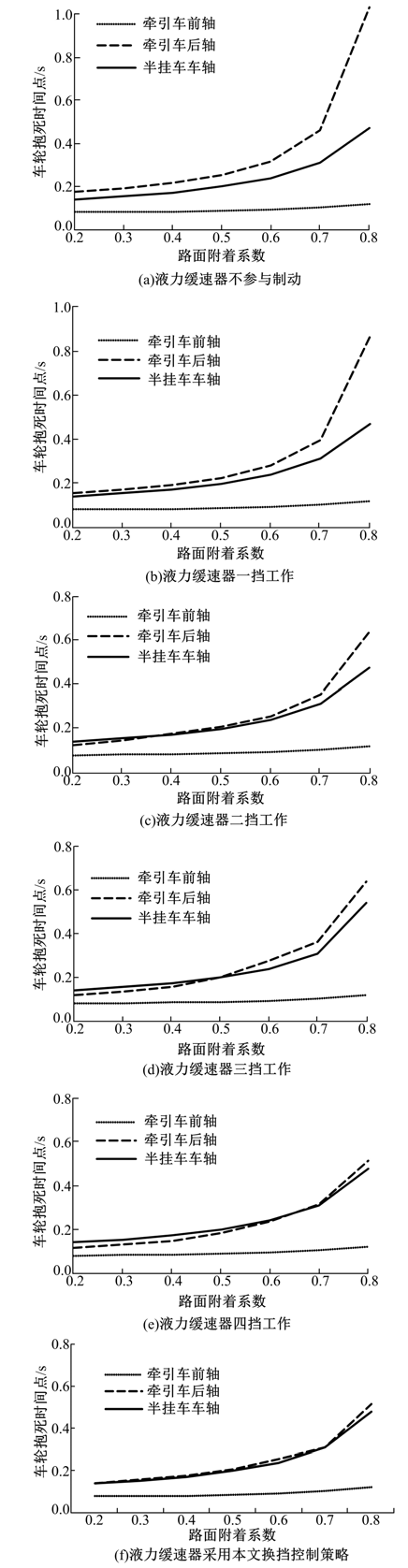 | 图7 不同制动工况下各轮抱死时间点图Fig.7 Point diagram of wheel lock under different braking conditions |
如图7(a)所示, 液力缓速器不参与工作时, 各轴车轮始终遵循最佳抱死顺序, 但是牵引车后轮与半挂车轮抱死时间间隔长, 制动效能低。如图7(b)所示, 液力缓速器一挡工作时, 牵引车后轮与半挂车轮抱死时间间隔有一定程度的减小。
如图7(c)~图7(e)所示, 液力缓速器二挡、三挡和四挡工作时, 虽然牵引车后轮与半挂车轮抱死时间间隔都有进一步的减小, 但是在部分附着系数的路面上, 出现了牵引车前轮、牵引车后轮、半挂车车轮, 这一非最佳抱死顺序。
如图7(f)所示, 对液力缓速器应用换挡控制策略后, 使得牵引车后轮始终在半挂车车轮抱死后抱死, 保证了半挂汽车列车的最佳抱死顺序; 并且, 在低附着系数的路面上, 该换挡控制策略可以最大限度将牵引车前轴车轮的抱死时间点贴近半挂车车轮的抱死时间点。
如表2所示, 在6种不同工况下半挂汽车列车在不同附着系数路面上的制动距离情况。
| 表2 液力缓速器6种工况下半挂汽车列车制动距离 Table 2 Braking distance of tractor-semitrailer in six conditions m |
本文液力缓速器换挡控制策略最大能够缩短制动距离0.1195 m, 但是也使制动距离增加了0.064 m。当液力缓速器不工作和液力缓速器一挡工作时, 半挂汽车列车的制动距离均大于液力缓速器采用该换挡控制策略时的制动距离; 当液力缓速器二挡、三挡工作时, 在路面附着系数μ =0.6、0.7和0.8路面上, 半挂汽车列车的制动距离大于液力缓速器采用该换挡控制策略时的制动距离; 当液力缓速器四挡工作时, 在路面附着系数μ =0.7和0.8路面上, 半挂汽车列车的制动距离等于液力缓速器采用该换挡控制策略时的制动距离。但是在其他情况下, 该换挡控制策略使得半挂汽车列车的制动距离均有不同程度的增加, 制动效能降低, 这是因为在换挡控制策略的操控下, 液力缓速器低挡工作, 制动力矩较小, 半挂汽车列车的制动强度降低, 制动距离相应增加。虽然制动距离增加, 但是半挂汽车列车车轮抱死顺序满足了最佳抱死顺序。
半挂汽车列车在直线制动过程中, 侧向力易使抱死的车轮发生侧向滑动, 对半挂汽车列车的制动稳定性产生不良影响。
为了分析半挂汽车列车在制动过程中遇到短暂侧向力作用时该液力缓速器换挡控制策略是否能提高半挂汽车列车的横向稳定性, 故而在半挂汽车列车仿真模型中加入侧向力模块, 仿真出牵引车横向速度、牵引车横摆角速度、铰接角大小和铰接角速度相关变量的变化情况。
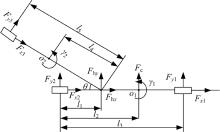
图8为侧向力作用时半挂汽车列车受力分析。图中, Fc为牵引车质心所受侧向力, N; γ 1为牵引车横摆角速度, rad/s; γ 2为半挂车横摆角速度, rad/s;
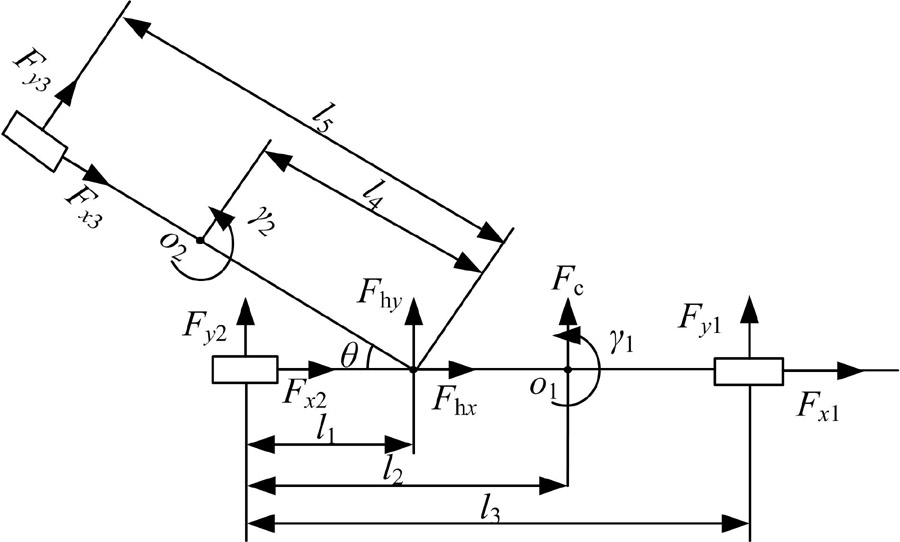 | 图8 侧向力作用时半挂汽车列车受力分析Fig.8 Force analysis of tractor semi-trailer combination with lateral force |
| 表3 半挂汽车列车参数补充 Table 3 Supplement of parameters of tractor-semitrailer |
如图8所示, 由于半挂汽车列车在侧向力作用下有侧向运动, 需要对上述运动方程进行补充。
牵引车纵向运动方程为:
式中:
牵引车侧向运动方程为:
式中:
牵引车横摆运动方程为:
半挂车纵向运动方程为:
式中:
半挂车侧向运动方程为:
式中:
半挂车横摆运动方程为:
鞍座处的约束方程为[16]:
牵引车前轴的动态载荷为:
式中:
牵引车后轴的动态载荷为:
半挂车轴的动态载荷为:
鞍座载荷变化为:
半挂汽车列车的各轴上车轮侧偏角分别为[17]:
式中:α 1、α 2分别为牵引车前轴和后轴车轮侧偏角, rad; α 3为半挂车轴车轮侧偏角, rad。
考虑到半挂汽车列车在制动过程中会出现横向运动, 将轮胎模型换成“ Dugoff” 轮胎模型[18]描述轮胎纵向力和侧偏力与滑移率和侧偏角间的非线性关系:
式中:i=1, 2, 3; s1、s2分别为牵引车前轴和后轴车轮滑移率; s3为半挂车轴车轮滑移率。
半挂汽车列车侧向力响应模型如图9所示。
 | 图9 半挂汽车列车侧向力响应模型Fig.9 Responding model of tractor-semitrailer to lateral force |
根据前面的分析, 在μ =0.2的路面上, 液力缓速器四挡工作时, 半挂汽车列车车轮抱死顺序是:牵引车前轴-牵引车后轴-半挂车车轴; 液力缓速器采用本文提出的换挡控制策略后, 半挂汽车列车车轮抱死顺序是:牵引车前轴-半挂车车轴-牵引车后轴。
半挂汽车列车制动初速度, 制动器制动力矩均与第4节中一样, 液力缓速器四挡工作时, 从牵引车后轴车轮抱死的时刻开始, 对牵引车质心施加1000 N的侧向力, 侧向力持续时间0.01 s; 液力缓速器采用本文提出的换挡控制策略时, 从半挂车车轮抱死的时刻开始, 对牵引车质心施加1000 N的侧向力, 侧向力持续时间0.01 s。
如图10(a)~图10(d)所示, 两种工况下, 半挂汽车列车从开始制动到完全停车为止, 牵引车的横向速度、牵引车横摆角速度、铰接角速度和铰接角大小与制动时间的关系图。与液力缓速器四挡工作的工况相比, 在换挡控制策略的作用下, 4个变量的数值均有不同程度的降低, 牵引车的横向速度减小0.081 m/s, 牵引车横摆角速度减小0.037 rad/s、铰接角减小3.322° , 铰接角速度减小0.057 ° /s。
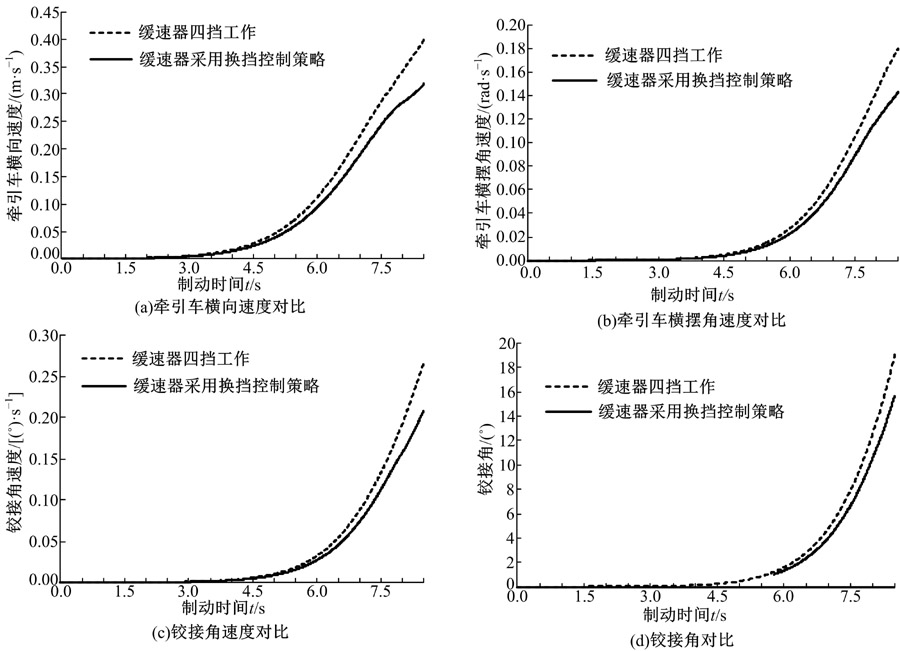 | 图10 两种工况下牵引车运动参数对比Fig.10 Comparison of motion parameters of tractor under two conditions |
(1)基于半挂汽车列车车轮最佳抱死顺序, 对液力缓速器挡位进行主动调控, 采用Matlab/Stateflow设计了换挡控制策略, 实现了牵引车后轮转速始终大于半挂车车轮转速的目标。
(2)液力缓速器换挡控制策略基于牵引车后轮与挂车车轮转速的关系, 可以改变原半挂汽车列车在低附着路面上的车轮抱死顺序, 保证了半挂汽车列车的各车轮始终以最佳抱死顺序抱死。
(3)液力缓速器换挡控制策略能够缩短半挂汽车列车在高附着路面上, 液力缓速器低挡工作时的制动距离, 但是在低附着系数路面上, 液力缓速器高挡工作时, 半挂汽车列车的制动距离反而增加。
(4)半挂汽车列车直线制动遇到短暂侧向力时, 该换挡控制策略可在一定程度上减小牵引车和半挂车的侧向速度和横摆角速度, 同时, 牵引车与半挂车的铰接角大小和速度也得到了抑制。
(5)本文换挡控制策略虽然对半挂汽车列车的制动横向稳定性有所改善, 但是效果不显著。为了更好地提升半挂汽车列车制动的横向稳定性, 还需要对半挂汽车列车的气压制动系统进行改进, 根据各轴动态载荷施加制动力矩, 并与液力缓速器挡位进行配合, 保证牵引车和半挂车始终都有相同的制动强度, 减小铰接点的冲撞力, 最好能实现牵引车和半挂车各轴的车轮同时抱死。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|