





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
对向行人流均衡反馈控制模型
[张蜇1  , 贾利民
, 贾利民1, 2, 3 , 秦勇1, 2, 3 , 云婷1, 2, 3 ]
, 贾利民, 秦勇|
|


作者简介:张蜇(1988-),男,博士研究生.研究方向:交通运输规划与管理.E-mail:13114245@bjtu.edu.cn
为避免双向通道行人流堵塞,建立了对向行人流反馈控制模型。考虑了对向行人流的干扰特性,利用社会力模型的匀速条件推导了对向行人流基本图。由于行人密度沿通道分布不同,按照行走方向不同,将双向通道分为多个分通道,采用状态空间方程建立了基于行人流量守恒的对向行人流系统动力学模型。为满足对向行人移动需求,提出对向行人流均衡控制目标,并建立了线性反馈控制模型。该模型可通过实时调整行人速度和通道两端的行人流入量,使得通道行人密度收敛于临界密度,从而最大化通道行人流量,提高通道服务水平。本文模型可以作为解决行人流和道路交通实时控制问题的普适方法。
A feedback control model of pedestrian counter flow was established to avoid pedestrian flow blocking in bidirectional corridors. The fundamental diagram of bidirectional pedestrian flow incorporating the conflict characteristic was derived using the social force model under the uniform state. To accommodate the possible inhomogeneous pedestrian density along the corridor, the bidirectional corridor was divided into several sections for different directions. A system dynamics model of pedestrian counter flow was proposed using the conversation law of pedestrian mass and the state space equation. To satisfy the moving demand of pedestrians in both directions, the equalization control objective was proposed based on the user equilibrium theory, and the linear feedback control model was established. The proposed control model can maximize the output flow of the corridor, thus improving the service level of the corridor by adjusting the walking speed of pedestrians and the corridor input flow in real time. The proposed model has the capability to serve as a general control method of both pedestrian flow and vehicle flow.
目前, 大型行人集散设施(如地铁站, 机场, 大型商场等)正向着信息化、智能化方向发展, 通过在一些重点区域和位置装设摄像头、传感器等感知设备监测行人流动[1], 并通过无线网络传输设备, 管理人员可以获得某一区域行人流的基本信息(如速度、密度和流量等), 这为行人流的智能控制提供了数据来源和技术支持。根据集散设施内行人流动的方向, 可以将行人流分为单向行人流、对向行人流和交叉行人流3类。对向行人流是指在一条双向通道内同时存在两个向相反方向行走的行人流现象, 相比于单向行人流, 由于不同方向的行人流之间存在强烈正面冲突和交叉冲突[2], 对向行人流中行人之间的相互影响更甚, 堵塞的概率也会更高。因此, 对向行人流的控制更具实际意义。
通道内的对向行人流作为一种常见现象, 对其的研究也较为广泛。目前对向行人流模型主要分为微观模型和宏观模型。社会力模型[3]、元胞自动机模型[4]、格子气模型[5]等在内的微观仿真模型将行人看作离散的个体, 通过模拟个体行为体现群体动力学特征, 这些微观模型凭借模型简单、容易编程等优点, 成为研究对向行人流的一类重要模型。微观模型在模拟行人流各种现象(如行人超越[6]、冲突和吸引[7, 8]、行人偏走[9]、随机分层[10, 11]和对向行人冲突所致的死锁堵塞现象[12]等)方面具有一定优势。在行人流控制方面, 文献[13]基于元胞自动机模型, 模拟建立了行人与疏导员之间的微观交互过程, 得出单个房间内疏导员的最优位置和数量, 以提高疏散效率。文献[14]基于格子气模型, 发现对向行人流间设置分割线可以有效提高双向行人流的流量。文献[15]基于社会力模型, 发现行人期望速度越高, 疏散时间反而越长, 并且存在使疏散时间最短的行人期望速度。文献[16]发现通过调整行人尺寸、反应时间和期望速度, 可以影响对向行人流的堵塞发生概率和起始时间。文献[17-20]基于格子气数值分析和模拟验证, 发现行人记忆依赖程度、横向移动舒适度、心理预期和密度差会影响双向行人流的稳定性。微观模型可以再现对向行人流自组织现象, 其控制策略涵盖了行人心理、生理以及环境结构等多方面因素, 具备多样性特点, 但由于微观模型仿真颗粒度小, 其计算时间也随着群体数量和行人移动规则的增多而快速增长, 而且难以构建解析方法求解行人流的最优控制策略。因此, 微观模型适用于小规模行人群体动力学建模, 只有具备强大的计算性能或者准确的解析等价模型, 微观模型才能适用于行人流的实时控制和管理。
宏观模型将行人群体视作连续流体, 通常采用偏微分方程描述行人群体的移动行为, 此类模型包括一维[21]和二维流体力学(LWR)模型[22, 23], 相对于微观模型, 宏观模型的行人群体模拟时间较少[24], 非常适于大规模行人群体的系统动力学建模和实时控制[25, 26]。目前, 基于宏观模型的车流控制研究较多[27, 28, 29, 30, 31, 32, 33], 行人流控制研究主要集中在疏散过程中的单向行人流控制[34, 35, 36, 37], 而关于冲突更为严重的对向行人流的控制研究较少, 这在一定程度上减缓了行人集散设施智能化发展进程。与单向行人流控制不同, 对向行人流控制不仅要考虑系统最优, 而且要平衡不同方向行人的移动需求。
因此, 本文首先根据行人微观模型推导对向行人流基本图, 实现了微观行人移动和宏观行人流现象的统一; 考虑对向行人流之间的干扰, 建立了基于流量守恒的对向行人流系统动力学模型, 采用状态方程形式描述了对向行人流演变过程。然后, 基于用户平衡和系统最优原则, 提出了对向行人流动力系统的均衡反馈控制模型和求解算法。最后, 将本文模型应用于对向行人流控制中, 证明本文模型可以为行人流的智能控制和管理提供理论支持。
建立对向行人流系统动力学模型的前提是清楚描述对向行人流基本图, 即行人流速度、密度和流量三者间的关系。Nikoli
根据社会力模型, 行人
式中:
将式(2)应用于所有行人, 可得Greenshields单向行人流基本图模型为:
对于交叉行人流, 行人所受作用力不仅具有单向行人流中拥挤力
同样, 令
式中:
将所得对向行人流基本图与文献[40]结果比较, 尽管两者基于的单向行人流基本图不同, 但两者最终表达形式基本相同, 从而验证本文推导过程的正确性。
右向行人流量
并且, 当
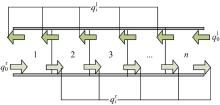
令双向通道长度为L, 将通道分为n个分通道, 如图1所示, 分通道i的长度为Li 。对于右向行人流, 令
 | 图1 模型变量Fig.1 Variables used in model |
根据连续流体力学LWR(Lighthill_Whithom_Richards)模型, 每个分通道右向和左向行人流均遵循以下公式:
假设每个分通道行人密度均匀分布, 根据式(8), 对于右向和左向行人流分别有:
那么分通道
令
式中:
将式(6)代入式(11)得:
式中:
将式(12)两端同时除以
然后, 进行以下变量简化:
将简化后的变量称之为标准变量。
通过以上等价简化, 式(12)可以等价为:
具体到每个分通道, 对向行人流的状态空间方程可以表示为:
对于无控制对向行人流, 本文作如下假设:
(1)通道行人总是期望以最大速度移动, 此时:
(2)当行人密度
(3)无控制条件下, 通道两端行人移动需求足够大, 并总是以最大允许流入量
(4)通道行人输出流量不受相邻通道或者出口的限制。
在上述4个假设条件下, 式(15)(16)则表示了无控制下通道内对向行人流动力系统演化的状态空间方程。
管理者期望通道发挥最大能力, 也就是使得通道行人输出流量最大。根据行人流量与密度的关系, 行人流状态目标集可以采用行人密度表示。两个方向行人流比例差距越大, 通道行人流量也越大, 当只允许单向行人移动时, 通道行人流量最大[40]。但是从行人角度分析, 这种偏向控制并不能同时满足两个方向行人的移动需求, 而且会造成单方向大量行人的拥挤排队, 也会造成一个方向行人速度高于另一方向行人速度的不公平现象。在实际的对向行人流控制中, 既要达到管理者的控制目的即通道流量最大, 又要满足行人需求即行走空间的用户平衡分配。根据无控制下的行人移动条件(3), 假设通道两端的行人需求量相等且均超过最大允许流入量, 并且所有行人接受并服从控制。根据用户平衡条件, 右向和左向行人密度的控制目标应相等[41], 相对于偏向控制, 这种控制称为均衡控制。根据上述均衡控制的含义, 求得使通道流量最大的标准临界密度为:
为使得左向和右向行人标准密度
式中:
根据式(19)可得行人密度关于时间
联立式(15)(16)(20)可得:
管理者对行人流的控制主要有两种措施:①限流措施; ②控制行人速度。一般通过设置障碍限制行人流入量或者通过广播提示行人调整走行速度。这两种措施在地铁站、旅游景点等大量人群聚集的地方较为常见。因此, 本文模型的控制变量为左向标准行人流入量
另一方面, 行人流入量不能大于当前最大允许流入量, 也不能小于0。根据式(7)可知:
在均衡控制下, 双向通道的性能指标为通道总行人流量。在行人密度向临界密度收敛过程中, 要求通道总行人瞬时流入量最大。采用标准行人流入量表示, 即:
定理1 通道的流入量最大化等同于通道的行人流出量最大化。
证明 行人总标准流出量
将分通道的对向行人流状态方程(21)累计相加, 可以得出:
令C=
因此, 以通道行人流入量最大化为目标是合理的。综上, 采用标准行人流入量, 可以建立以下线性规划模型:
在控制过程中, 需要在每个时刻求出线性规划(27)的最优解, 此最优解为控制过程中在时间
假设存在一个L=50 m的双向行人通道, 将通道分为5个同等长度的分通道, 每个通道长度为
模型运行平台为Windows XP操作系统, CPU2.93 GHz, 采用Matlab软件实现模型, 其中线性规划模型直接使用Matlab自带函数Linprog求解, 模型运行400时间步, 模型运行10次, 其中最少计算时间为3 s, 最多为4.1 s。
图2~图4为行人密度在无控制和均衡控制下的变化情况。如图4所示, 无控制下所有分通道行人标准密度均增加到1, 产生通道死锁堵塞[12], 即
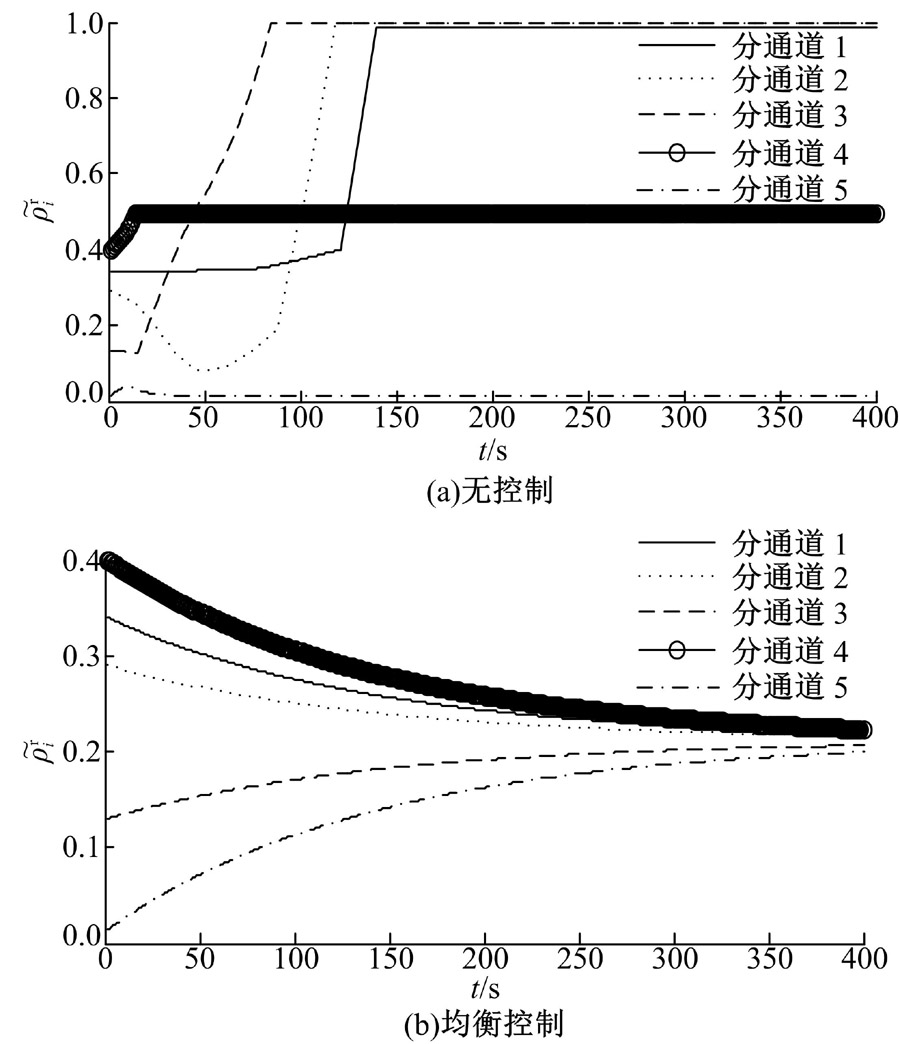 | 图2 无控制和均衡控制下 |
 | 图3 无控制和均衡控制下 |
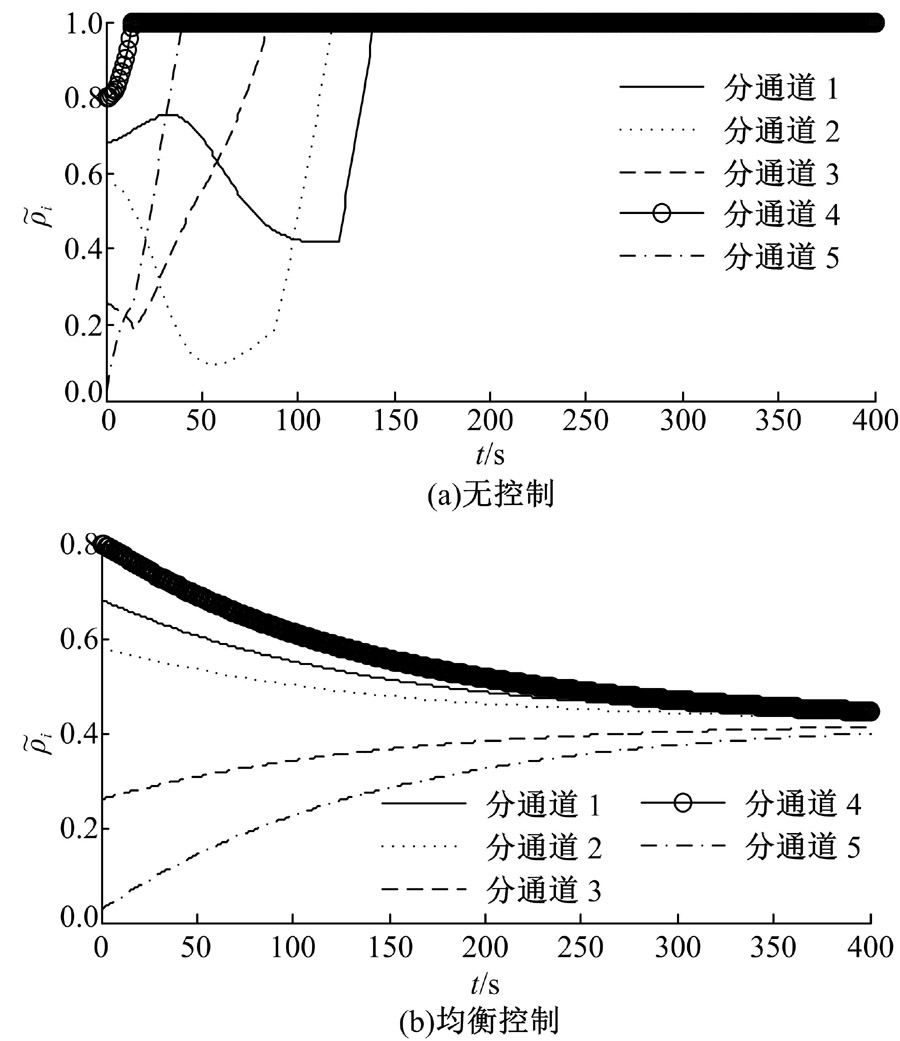 | 图4 无控制和均衡控制下 |
 | 图5 无控制和均衡控制下 |
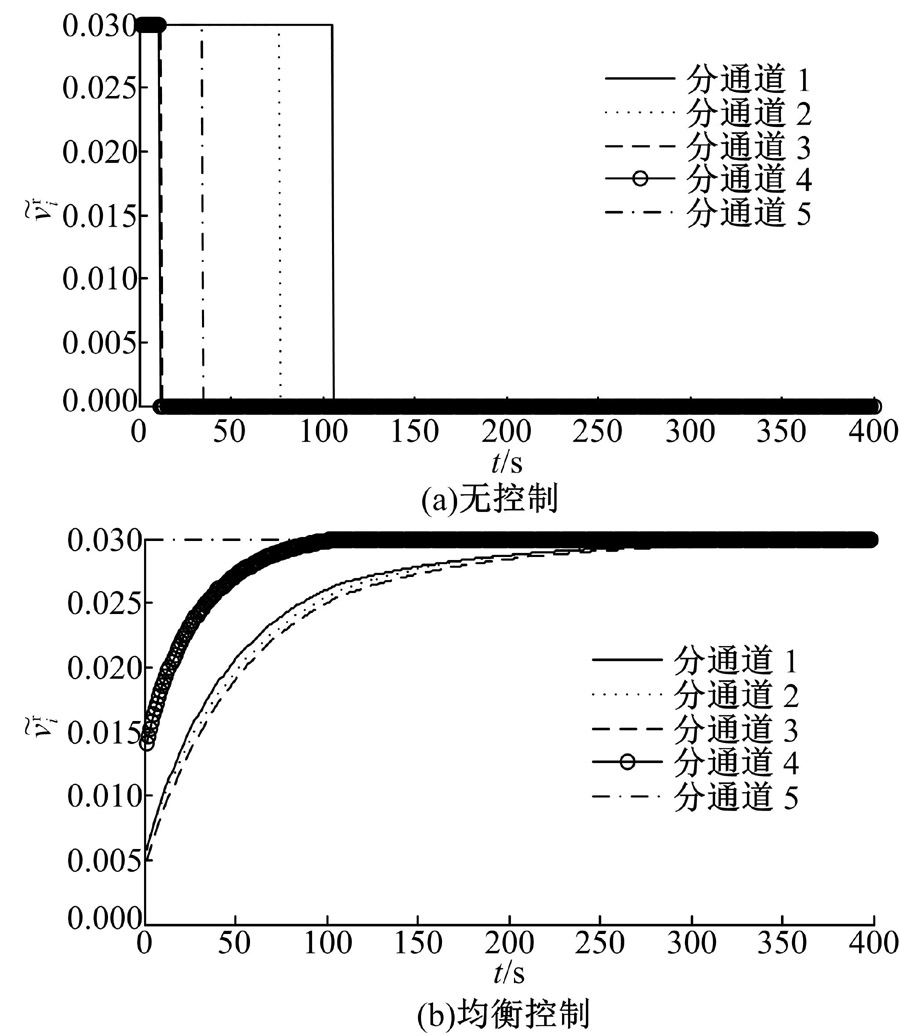
图5和图6分别为左向和右向行人速度在无控制和均衡控制策略下的变化情况。无控制下, 由于通道堵塞, 全部行人均停止移动, 即
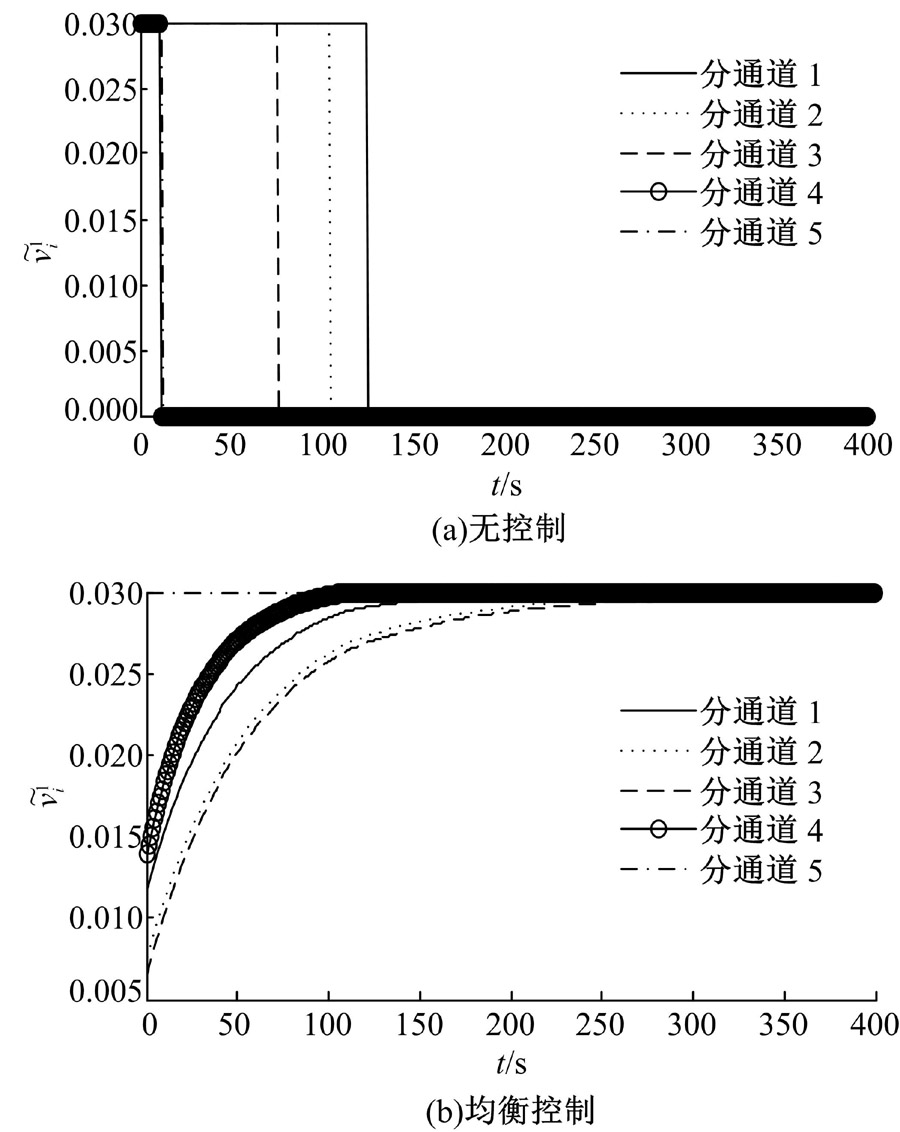 | 图6 无控制和均衡控制下左向行人标准速度 |
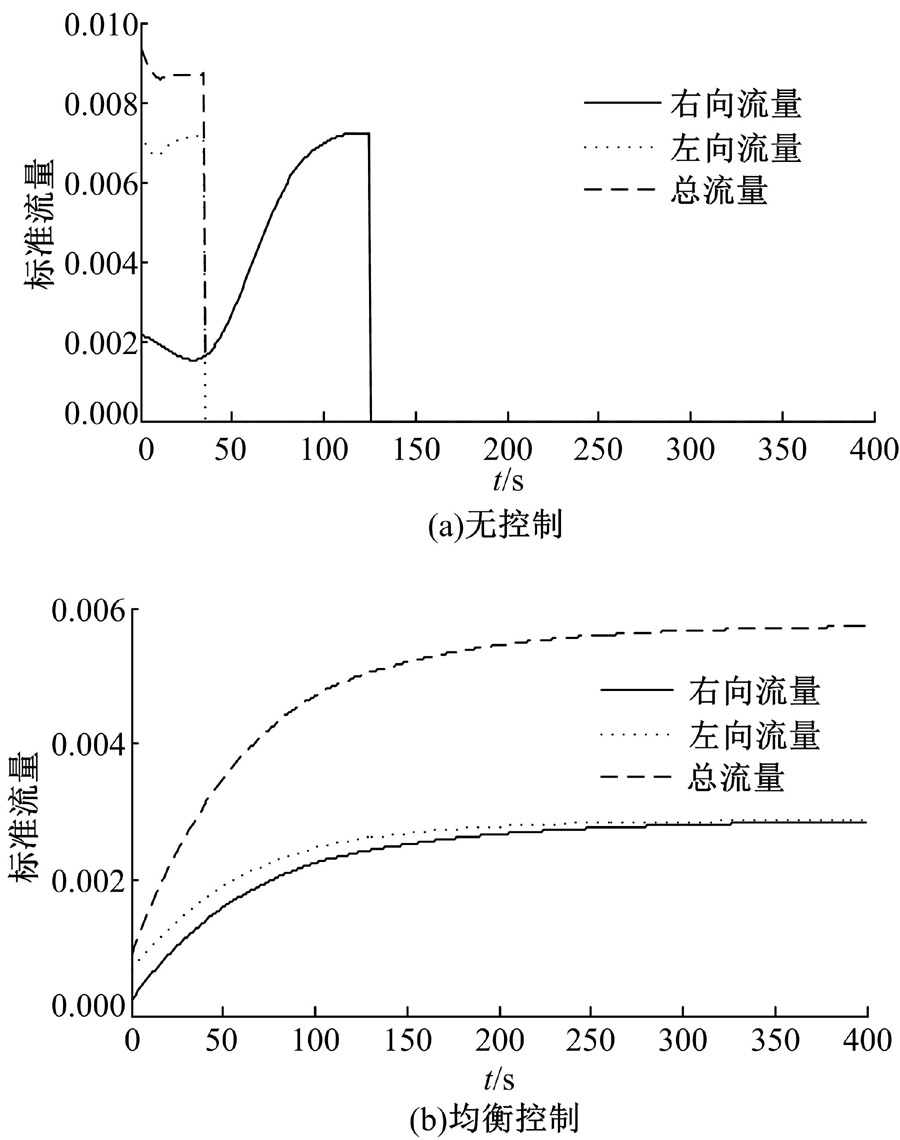 | 图7 无控制和均衡控制下 |
图7为无控制和均衡控制下的流量变化。无控制下, 由于通道堵塞, 右向行人流和左向行人流的标准流入量均收敛于0, 即
上述为半干扰情形下的对向行人流控制策略数值仿真结果, 说明本文均衡控制模型可以有效避免通道行人拥堵, 提高行人走行速度, 在满足行人需求的同时提高了通道通过能力和服务水平。
基于社会力微观模型建立了对向行人流干扰因素下的行人流基本图模型, 首次采用状态空间方程形式描述了双向通道对向行人流演变的系统动力学过程, 能够再现通道对向行人流死锁堵塞现象。基于用户均衡理论和系统最优原则, 提出对向行人流均衡控制目标, 率先提出了面向行人流智能控制的对向行人流均衡反馈控制模型。通过数值分析证明该模型所得控制策略可有效避免行人拥堵, 提高了通道的服务能力。此外, 本文模型的求解计算速度较快, 可满足行人流控制实时性要求。模型的实现依赖于通道行人密度的准确实时获取, 将本文模型与视频监控, 无线传输以及图像识别等智能技术相结合, 可实现行人流的智能控制, 从而提高步行通道的管理水平和效率。
本文模型适用的前提条件是行人速度和密度存在如式(5)所示的比例关系, 很多行人流基本图可以满足模型前提条件, 而且该模型也适用于道路交通实时控制和管理。因此, 模型在行人流和道路交通控制方面具有一定的普适性。本文模型的控制对象为单通道的对向行人流, 并且假设行人的流出量不受其他相邻通道的限制, 模型的不确定性来源于行人是否能够依照控制命令行走。在未来研究中, 需要研究不确定条件下网络中行人流的系统动力学模型, 建立具体控制措施如语音广播, 物理导向和现场指挥等与行人流控制目标的联系, 对现实世界中行人流进行最优控制, 为行人流的智能管理和控制提供理论和技术支持。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|