






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于蝇复眼的交通事故现场全景图像阵列仿生设计
[谭立东1  , 刘丹
, 刘丹2 , 李文军1 ]
, 刘丹]
|
|


作者简介:谭立东(1975-),男,副教授,博士.研究方向:车辆行驶可靠性与安全技术.E-mail:tanld@jlu.edu.cn
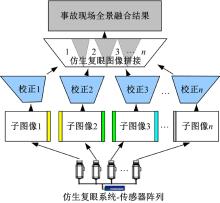
为了快速、有效地采集并处理交通事故现场全景图像,以满足事故现场快速勘查的要求,本文结合昆虫复眼和蟹眼的视觉机理和结构,首先设计了基于蝇复眼的交通事故现场全景图像采集仿生阵列,该阵列将多个图像传感器列阵排列,每个传感器使用各自独立的成像通道完成图像的获取,从而“镶嵌”成全景图像。然后,分析了复眼仿生阵列的设计原理,通过构建阵列的结构数学模型搭建了试验平台。最后,通过试验验证了本文设计阵列的有效性。试验结果表明,该交通事故现场复眼仿生阵列可以实现大视场成像。
In order to fast and effectively acquire and process the panoramic image of traffic accident scene to meet requirements of the accident scene rapid investigation, a bionic compound eye array is designed. This design is inspired by combination of the visual mechanism and structure of fly compound eye and crab eye. The array is composed of a plurality of image sensors. First, each sensor uses its own independent imaging channel to complete the image acquisition. Then, the images of all sensors are stitched together to build the panoramic image. The design principle of the bionic compound eye array is analyzed. The experiment platform is built by establishing the mathematical model of the bionic compound eye array. Imaging experiment results show that the bionic compound eye array for traffic accident can realize the large field of view image and obtain the panoramic image.
目前, 在勘查交通事故现场时, 多采用造价较高的单反数码相机对交通事故现场周围的事物和场景进行拍摄[1, 2]。后期对事故进行分析时, 由于照片数量过多, 且获取的是非同步图像, 可能会存在漏拍关键信息的情况, 很难对事故现场建立起形象的认知, 且为追求较大的视场, 往往造成严重的图像畸变, 影响图像质量, 使得事故分析结果存在偏差, 造成责任划分的不公平性。
昆虫复眼具有结构简单、视场大、高分辨率等特点[3], 因而受到研究人员的极大关注, 是仿生学研究中一个重点的研究对象。复眼都是由几个到几万个单眼组成, 呈放射状分布在球面或椭球面基底上, 通常在头部占有突出的位置[4, 5]。每个单眼在不同的方向对应一个成像通道, 将所有单眼捕捉的图像进行融合拼接处理, 就会在大脑中产生一个宽视角高分辨率的像, 即可实现大视场空间的成像[6, 7]。2006年, 美国伯克利大学将微加工技术与溶胶— 凝胶技术相结合, 实现了以曲面为基底的仿生人工复眼结构[8], 该结构包含超过8000个子透镜, 虽在一定程度上实现了视场的极大化, 但很难对精度进行控制, 实用化程度不高。2008年, 韩国提出了一种模仿蜻蜓复眼的四镜头光学系统, 实现了球面范围内最大为315° 的图像获取, 但分辨率较低、成像效果差, 难以应用到实际中[9]。国内从20世纪80年代起, 也开始对昆虫的复眼结构展开了相关研究。但多数研究都停留在理论分析层面, 缺乏实际的应用经验。并且在复眼仿生研究中, 较少有将其与道路交通安全联系起来。
因此, 本文将昆虫复眼和蟹眼结构与电荷耦合元件(Charge-coupled device, CCD)图像传感器相结合, 模拟了昆虫复眼的视觉机理; 设计了一种交通事故现场伸缩式扇形复眼仿生阵列, 实现了大视场成像的功能, 有效解决了交通事故现场一次性拍摄全景图像的问题。将两种复眼有机地结合到一起, 实现了交通安全科学与仿生学的跨学科性研究, 是基于仿生视觉技术对交通事故现场快速勘查图像处理技术进行的全新尝试, 这为跨学科视觉图像科学研究提供了广阔的应用前景。
本文采用并列型复眼成像方式, 并列型复眼中的每个单眼都是相对独立的, 对应不同的方向[10]。每个单眼只能看到整个物体的一部分, 单眼把从强度不同的刺激中得到的图像综合在一起联立或镶嵌而成一个完整的镶嵌像。
苍蝇复眼的工作原理不同于人眼, 蝇眼包含了上千个能够独立成像的单眼, 每个单眼能迅速分辨物体的大小及形状, 后通过各方向单眼图像的融合重新组合成物体完整的像, 可观察到几乎达到360° 范围内的事物[11]。螃蟹的额缘两侧各有一个能转动的有柄复眼, 这种有柄结构实现了蟹眼的自由移动伸缩并可高效地收集光线[5]。图1为苍蝇的复眼; 图2为螃蟹的有柄复眼。
 | 图1 苍蝇的复眼Fig.1 Fly compound eye |
 | 图2 螃蟹有柄复眼Fig.2 Crab compound eye |
本文设计的复眼仿生阵列在外形结构上模仿蝇复眼和蟹眼, 由多个单眼排列组成且能够伸缩移动; 在功能上模仿蝇眼的大视场成像特点。图3为复眼阵列的成像原理, 每个单眼镜头具有一个独立的成像通道, 通过各方向的独立通道成像将环境分割成若干个小视场, 实现
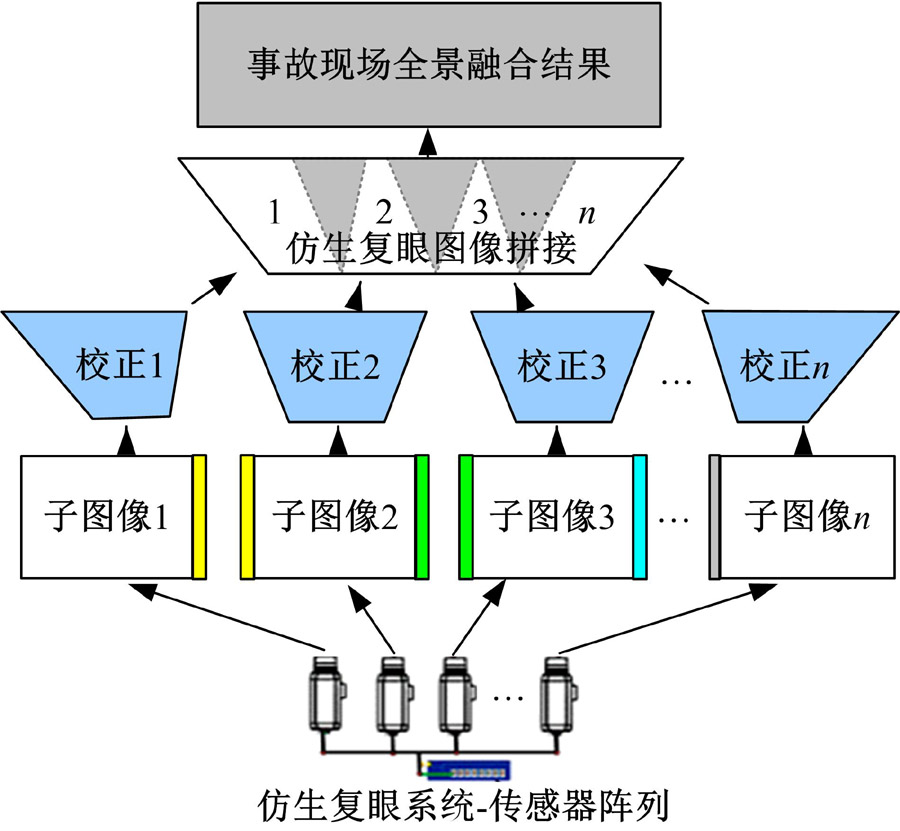 | 图3 交通事故现场复眼仿生阵列成像原理Fig.3 Imaging principle of bionic compound eye array |
根据蝇复眼和蟹眼的结构特点, 设计交通事故现场复眼仿生阵列。该阵列是以扇形为基底, 其上分布了众多CCD单眼镜头, 以对交通事故现场进行全景图像获取。每个单眼对应一个成像通道, 使整个复眼阵列能够对场景的不同方向进行成像, 从而扩大了拍摄范围。在设计中运用AutoCAD对复眼阵列的结构进行简要绘制。
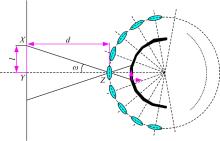
蝇复眼是由无数个单眼有序排列组成。为实现全景图像的获取, 设单眼个数为n, 各单眼光轴夹角为θ , 其关系满足下式:
从理想角度来说,
 | 图4 复眼仿生阵列理想结构Fig.4 Bionic compound eye array ideal structure |
在该复眼仿生阵列设计中, 模拟昆虫复眼采用多个摄像头同时工作, 将大视场分为若干小部分逐一进行图像获取, 这样既满足了对大视场的要求, 又能保证较高的分辨率。如何根据实际需要进行蝇复眼仿生阵列单眼镜头之间夹角、镜头分布半径及镜头数量等方面的匹配则是本文需要研究的, 针对这些问题, 可通过镜头间的关系建立结构数学模型。
首先, 研究复眼阵列中单镜头成像区域(见图5)的几何关系。图5中, 半视场角为ω ; 物距为d; 半成像区域为l。由图中三角形
 | 图5 单镜头成像区域Fig.5 Single lens imaging area |
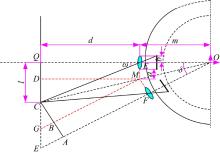
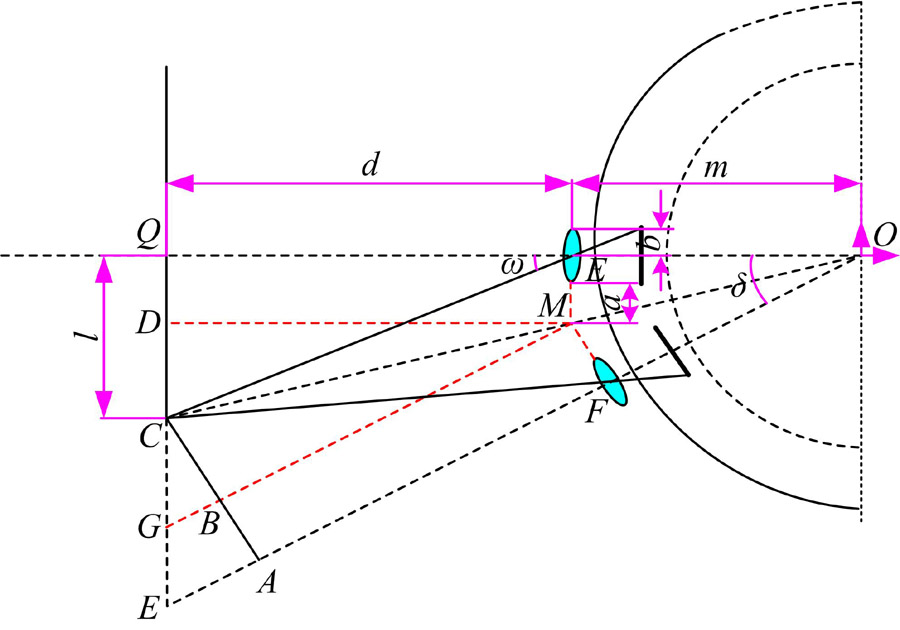 | 图6 双镜头成像区域示意图Fig.6 Schematic diagram of double lens imaging area |
图6为双镜头组合的成像区域示意图, 由角度和长度确定镜头的排列位置。图中, m为镜头分布半径; d+m为实际成像系统物距; a为镜头边缘到两镜头分布角平分线距离; b为镜头半宽; δ 为两镜头夹角; 点O为镜头分布的原点; 点C为两镜头视场分割点; AC和CQ分别为两镜头等距离半成像区域。当出现视场分割点时, 实际物距D和单镜头半成像区域l的表达式分别为:
对两镜头出现视场分割点时的D和l进行分析, 结果如图7所示。假设ω 为30° ; δ ∈ (0° , 50° ); m∈ (0, 100) cm。
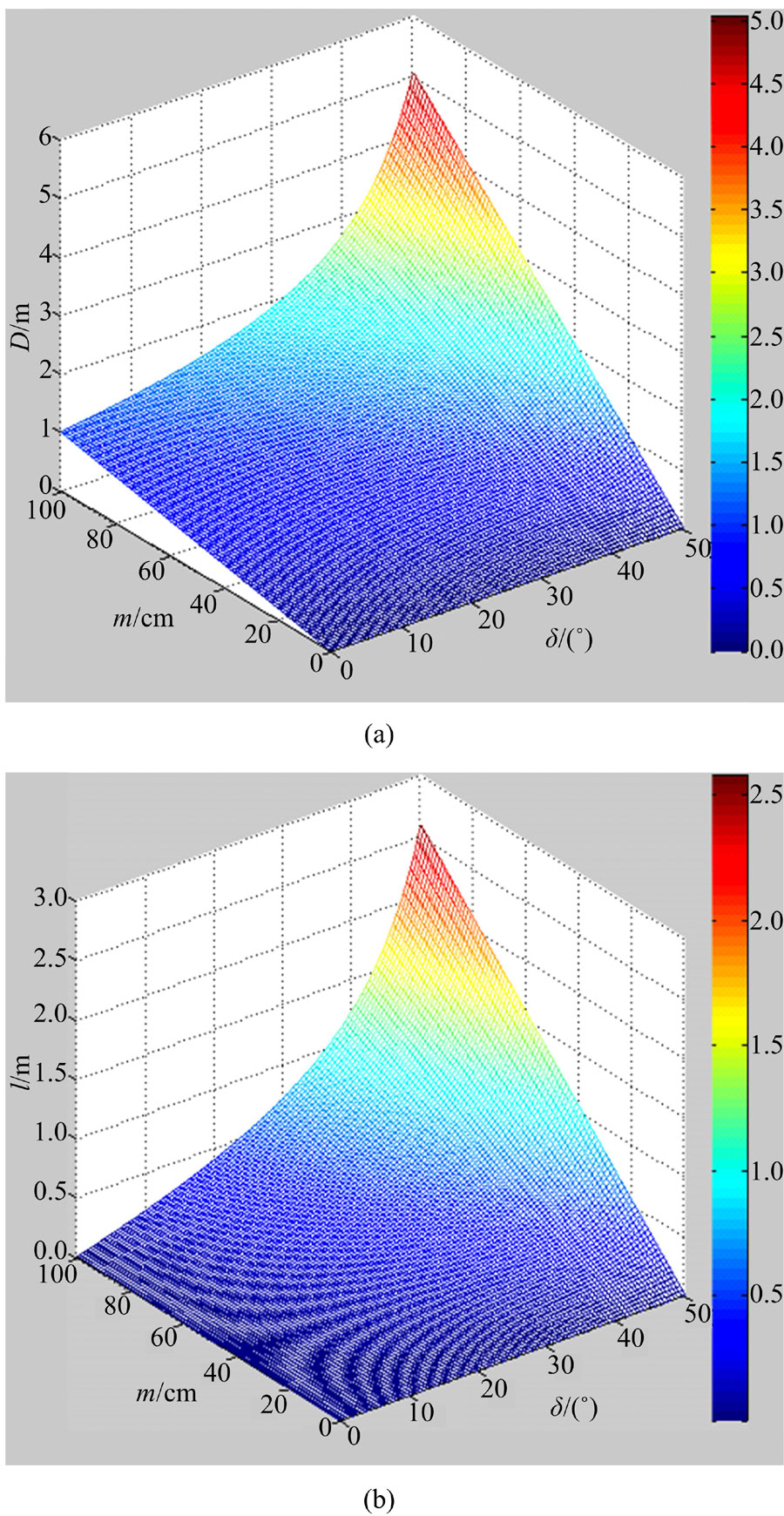 | 图7 复眼阵列中D和l的分布图Fig.7 Distribution of D and l in compound eye array |
对阵列中镜头出现视场分割点时刻所能成像的物距和区域进行分析可知, 它们与镜头的分布半径、视场角、镜头之间夹角等有关。当镜头的分布半径一定时, 随着物距的变化, 两个镜头采集图像时会出现景物重复采集的现象, 即图像之间会出现一部分的重叠。如图8所示, 在镜头分布半径不变的情况下,
 | 图8 双镜头视场重叠情况Fig.8 Double lens field overlap |
通过推到得到
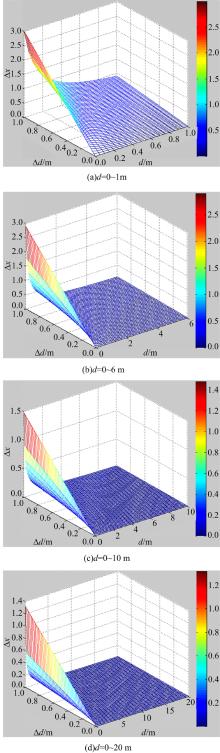
根据式(5), 以ω =30° , δ =45° , m=50 cm为例, 对
从图9可知:当物距
 | 图9 Δ x随d的变化情况Fig.9 Change of Δ x with change of d |
随着
交通事故现场复眼仿生阵列的试验平台包括图像采集和机械运动两部分, 如图10所示。该试验平台的设计是模仿蝇复眼和蟹眼, 图像采集部分包括15个单眼镜头及其对应的CCD图像传感器和负责信号传输的交换机; 机械部分包括5个运动行程为1.1 m的直线导轨, 在电机带动下仿蟹眼结构实现镜头在导轨上的往返伸缩运动, 通过调节钮可实现镜头支撑架的上下运动和俯仰运动。这样的设计可为交通事故现场复眼仿生阵列试验平台的复眼镜头提供3自由度(即伸缩、俯仰、浮沉)运动, 为试验平台中镜头模拟蝇复眼和蟹眼的视觉机理提供可能性。
 | 图10 仿生复眼阵列试验平台Fig.10 Bionic compound eye array experiment platform |
为验证所设计的交通事故现场复眼仿生阵列具有大视场成像的功能, 且能够实现交通事故现场的全景图像获取, 对复眼阵列开展成像试验。考虑到试验场地的限制, 这里使用3个单眼镜头进行试验, 采集试验平台的m=70 cm, δ =35° 时, 所拍摄的图像如图11(a)(b)(c)所示, 后对所获取的图像进行拼接处理, 得到大视场图像如图11(d)所示。
通过试验可知该种镜头排列方式的组合视场角为110.06° , 与单镜头视场角47° 相比扩大了2.33倍。试验结果表明:该交通事故现场复眼仿生阵列可以实现大视场成像; 当镜头夹角和分布半径一定时, 随着镜头数量的增加, 视场不断扩大, 是单眼镜头视场的若干倍; 镜头数量相同时, 镜头之间夹角越大, 组合视场越大, 但相对的拼接后图像中的景物缩小、拍摄范围扩大; 当镜头分布半径增大, 组合视场会略微变小, 影响并不是十分明显, 随着镜头的推进, 局部主体景物变清晰。
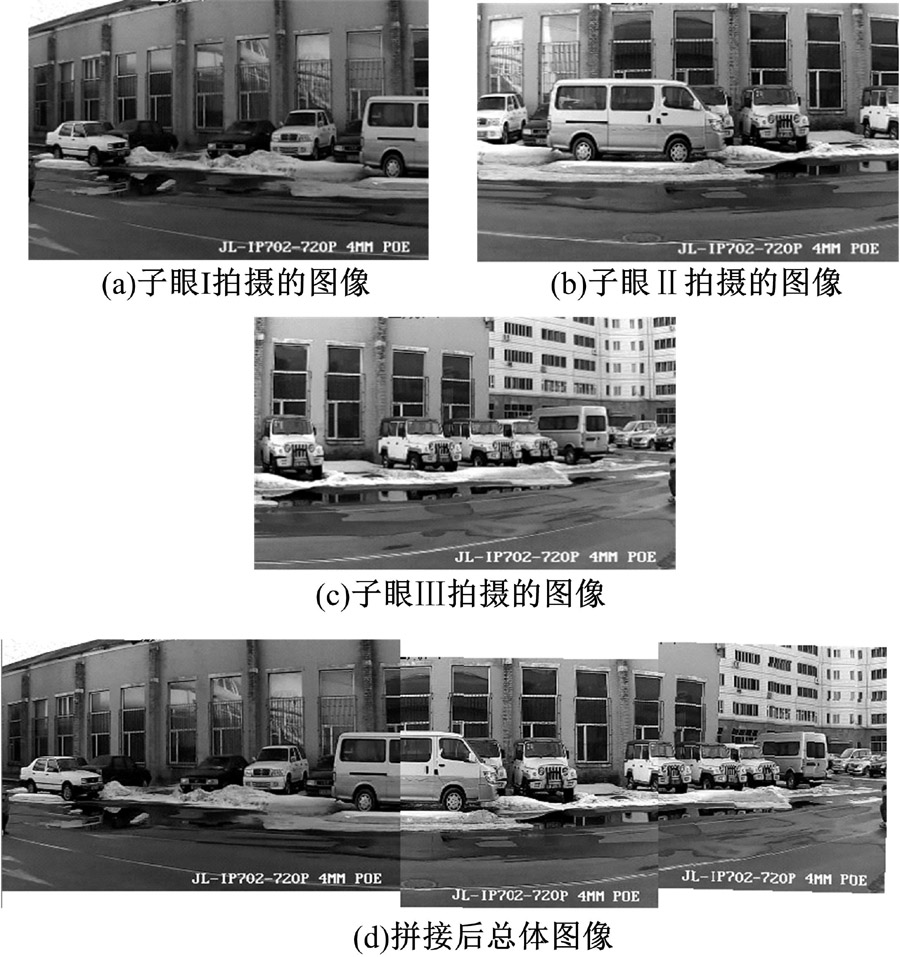 | 图11 仿生复眼阵列成像结果Fig.11 Imaging results of bionic compound eye array |
根据蝇复眼和蟹眼的视觉机理和成像特点, 研究了基于蝇复眼的交通事故现场仿生阵列, 并通过复眼仿生阵列的几何关系建立了结构数学模型, 分析了镜头之间夹角、分布半径和镜头视场角对阵列图像获取的影响。为进一步研究, 搭建了复眼阵列的试验平台。通过成像试验验证了交通事故现场复眼仿生阵列能够实现大视场成像的功能。与传统交通事故现场拍照取证方法相比, 该仿生阵列采集图像用时缩短, 且获取的为同步图像; 通过图像拼接处理获得的全景图像, 避免了传统广角镜头拍摄所产生的图像畸变情况, 能够最大程度地记录下真实的事故现场情况, 有效地解决了交通事故现场一次性拍摄全景图像的问题, 提高了交通事故现场勘查和后续处理的效率和质量。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| 3 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|