






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于反应式行为的车辆运动意图辨识
[孙博华 , 邓伟文, 朱冰, 吴坚, 王姗姗]
, 邓伟文, 朱冰, 吴坚, 王姗姗]
, 邓伟文, 朱冰, 吴坚, 王姗姗]
|
|


作者简介:孙博华(1988-),男,博士研究生. 研究方向:汽车智能化技术. E-mail:sunbh14@mails.jlu.edu.cn
为提高无人驾驶智能汽车决策规划能力,提出了一种基于反应式行为的车辆运动意图辨识策略。对反应式车辆运动意图进行了分析与归类,建立了基于多维高斯隐马尔科夫过程的反应式车辆运动意图模型;搭建了车辆运动意图信息采集系统,进行了典型工况数据采集;在此基础上,对模型进行训练,利用正交试验对模型参数进行优化,选取典型工况进行辨识测试。结果表明,所提出的辨识策略能够有效辨识交通车辆的运动意图。
To improve the performance of decision-making planning for intelligent vehicles, a vehicle motion intention identification strategy is proposed based on the reactive behavior. Analysis and classification are performed for reactive vehicle motion intention, and a Reaction Motion Intention Model (RMIM) is built based on Multi-dimension Gaussian Hidden Markov Process (MGHMP). The experimental data of typical cases are obtained from the vehicle motion intention data acquisition system, and RMIM is trained and identified. The key parameters of the model are optimized using orthogonal test method, and typical cases are selected for measurement and analysis. Test results show that the reaction intention of traffic vehicle can be identified effectively using the proposed identification strategy.
当无人驾驶智能汽车在结构化道路上行驶时, 交通车辆运动意图不确定性作为交通环境主要不确定源之一, 对控制系统决策规划提出了巨大挑战, 已成为影响智能汽车安全性的重要问题。因此, 日益受到各国学者的广泛关注[1, 2, 3]。
目前典型的车辆运动意图辨识方法, 主要在弯道、直线或坡道等特定工况下, 通过辨识车辆的转向、油门、制动等操纵意图, 来表征车辆的运动意图, 如基于多维高斯的转向意图辨识方法[4]、基于Hilbert-Huang的制动意图辨识方法[5]和基于双层隐马尔科夫的转向加速意图辨识[6]等。上述方法在解决交通车辆运动意图不确定性辨识问题时, 会出现由于各种道路拓扑结构下车辆耦合区域数量趋于无限大, 导致交通车辆运动意图辨识模型无上界的问题, 使得辨识模型精度不足, 模型普适性和模型规模可控性较差, 在部分工况下甚至无法为智能汽车控制系统提供有效解[7]。
本文提出一种基于反应式行为的车辆运动意图辨识策略。通过对车辆运动意图进行描述与分类, 建立基于多维高斯隐马尔科夫过程的反应式车辆运动意图模型; 搭建车辆运动意图信息采集系统, 分别在T形路、环岛、直线路3种典型工况下进行数据采集; 利用采集数据对反应式车辆运动意图模型进行训练和辨识测试, 并通过正交试验对模型关键参数进行优化。该方法辨识过程不依赖于特定工况, 可在全工况条件下为智能汽车决策与规划提供准确、可靠的交通车辆运动意图信息, 辨识方法具有普适性和规模可控性。
传统的车辆运动意图辨识策略将车辆的运动意图定义为车辆运动意图子模型的集合:
Im={i1, i2, …, im}(1)
式中:Im为车辆运动意图子模型集合, 下角标m代表车辆运动意图子模型数目。
每一个子模型分别对应一个车辆的隐目的地:
Hg={h1, h2, …, hg}(2)
式中:Hg为车辆运动隐目的地集合, 下角标g代表在主车与交通车辆的特定行为耦合区域中, 交通车辆运动隐目的地数目。
设在全部道路拓扑结构上主车与交通车辆产生行为耦合的区域集合为:
RA, j={RA, k, k=1, 2, …, j}(3)
式中:RA, k为行为耦合区域集合, 下角标k代表行为耦合区域数目。则主车与交通车辆在任意RA, k上, 均对应一组交通车辆的隐目的地集合, 记为RA, k→ Hg, k。
可得所有道路拓扑结构上交通车辆的运动意图模型集合为:
Im=
显然, 在所有道路拓扑结构上, 主车与交通车辆行为耦合区域的个数j趋近于无穷, 则RA, j是无上界变量, 对应Hg, k→ ¥ , 即当j→ ¥ 时, Im→ ¥ 。传统车辆运动意图辨识模型会出现随耦合区域数量的增加而无限延展的情况。
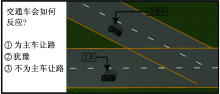
为提高辨识模型的普适性和模型规模的可控性, 本文通过判断RA, j集合中交通车辆的反应行为建立车辆运动意图模型。如图1所示, 当主车和交通车辆沿T形路行驶时, 交通车辆会受到主车运动态势的影响, 产生避让、犹豫、保持等反应行为, 可以通过辨识这些反应行为来辨识交通车辆的运动意图。
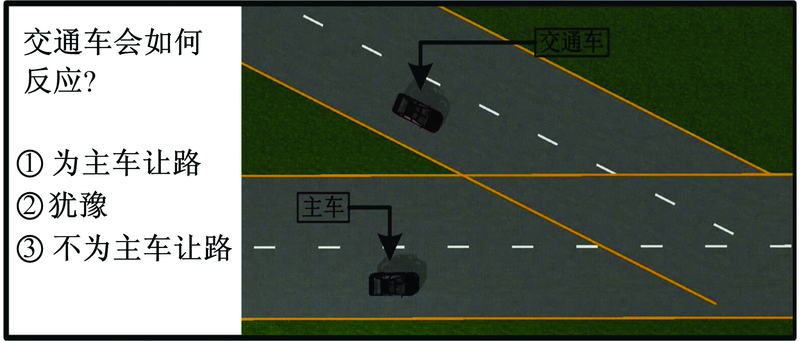 | 图1 反应式交通车辆运动意图Fig.1 Obstacle vehicle motion intention based on its reaction |
在空间演化上, 主车与交通车辆的运动均可看作其在特定道路拓扑结构上的平面运动, 即存在纵向和侧向两个方向的相对运动意图; 在时间演化上, 交通车辆的反应行为可以看作是本车状态s0及其与主车相对状态ds0相互作用的响应结果。
因此, 交通车辆的运动意图可以表示为:
Im={Ilon, Ilat}={f(s0, lon, ds0, lon), f(s0, lat, ds0, lat)}(5)
式中:Ilon和Ilat分别为交通车辆的纵向和侧向运动意图集合。
由于s0与ds0均不受道路拓扑结构约束, 所以总可以找到一个有界的反应式运动意图集合建立车辆运动意图模型。这种通过辨识交通车辆的反应来描述车辆运动意图的方式更具有普适性。
在任意道路拓扑结构行为耦合区域RA, k中, 在主车刺激作用下, 交通车辆会通过感知、推理和判断等内在状态产生外在反应式运动意图, 通过聚类, 交通车辆的纵向和侧向反应行为意图均可以归纳为:
(1)渐远意图:交通车辆的运动意图受到主车影响, 产生躲避主车的反应行为。
(2)犹豫意图:交通车辆的运动意图受到主车影响, 产生犹豫判断和动态微调的反应行为。
(3)保持意图:交通车辆的运动意图不受主车影响, 保持运动趋势不变的反应行为。
(4)渐近意图:交通车辆的运动意图受到主车影响, 产生具有侵略性的渐近反应行为, 试图对主车运动进行抑制。
因此, 反应式车辆运动意图可以表示为:
式中:下角标FA、HT、NM、CI分别代表渐远、犹豫、保持和渐近运动意图。
交通车辆在特定运动意图下的自身状态s0及与主车的相对状态ds0为一组时间连续的观测序列, 且具有影响下一时刻内在状态的作用, 故可以采用隐马尔科夫过程(Hidden Markov process, HMP)对交通车辆的反应式运动意图进行辨识。
本文采用多维高斯模型表示观察量的概率密度函数[8], 应用多维高斯隐马尔科夫过程(Multi-dimension Gaussian hidden Markov process, MGHMP)建立反应式车辆运动意图模型(Reaction motion intention model, RMIM), 如图2所示。
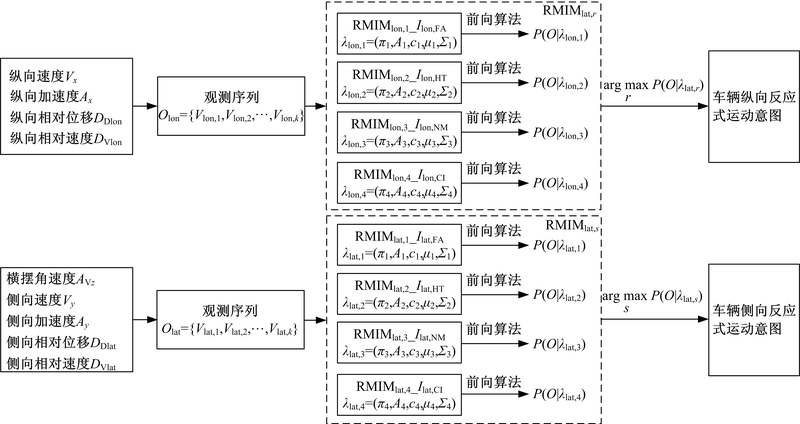 | 图2 反应式车辆运动意图模型Fig.2 Reaction motion intention model of obstacle vehicle |
模型包含车辆纵向反应行为运动意图RMIMlon, r和侧向反应行为运动意图RMIMlat, s两个模块, 其中下角标r=1, 2, 3, 4; s=1, 2, 3, 4分别代表纵向和侧向的渐远、犹豫、保持和渐近等4个运动意图子模型, 每一个交通车辆运动意图子模型均等价于一个MGHMP。
RMIM模型的输入数据应能够表达交通车辆反应式运动意图的激励特征, 同时还应考虑数据维度对计算时间的影响。因此, 车辆纵向反应行为运动意图模块选取纵向速度Vx, 纵向加速度Ax, 纵向相对位移DDlon和纵向相对速度DVlon等4维输入。车辆侧向反应行为运动意图模块选取横摆角速度AVz, 侧向速度Vy, 侧向加速度Ay, 侧向相对位移DDlat和侧向相对速度DVlat等5维输入。
RMIM模型中的各个子模型均等价于MGHMP过程。MGHMP过程包含一组N维隐状态qt及每一状态下κ 组可能的观察值输出[9]。RMIM模型精度随MGHMP阶数的增加而提高, 但阶数过高会大大降低计算速度。考虑到主车与交通车辆运动模式的时间序列, 其下一时刻的运动状态主要受到上一时刻运动状态的影响, 故RMIM子模型采用从左至右结构的一阶马尔科夫过程。
初始状态分布定义为:
π ={π i}(7)
其中:
π i=P[q1=i](8)
1≤ i≤ N
状态转移概率矩阵定义为:
A={aij}(9)
其中:
aij=P[qt+1=j|qt=i](10)
1≤ i, j≤ N
式中:qt表示t时刻的状态。
O为一组可观测序列集合, O={V1, V2, …, Vκ }, V代表可能的观察值, 下角标κ 为每一状态对应的可能观察值数目。
设状态j的观察概率矩阵为B={bj(O)}, 由于在连续观测序列中κ → +¥ , 故B={bj(O)}为状态j输出的观察值概率密度函数[4], 表达式如下:
bj(O)=
1≤ j≤ N
式中:cjk为第j个状态第k次混合的混合权重系数; M表示高斯混合数; N(O|μ jk, Σ jk)表示均值为μ 、协方差为Σ 的高斯分布概率密度函数。
权重系数cjk满足:
cjk≥ 0, 1≤ j≤ N, 1≤ k≤ M
1≤ j≤ N
故RMIM的子模型可以由N个隐状态通过一个元组λ 定义:
λ =(π , A, c, μ , Σ )(14)
辨识过程中, RMIM子模型分别输出交通车辆反应式运动意图模型概率, 采用对数似然率表示所得结果:
Loglik(θ )=ln[P(O|λ )](15)
分别选取纵、侧向子模型中最大似然函数值对应的反应行为意图作为当前时刻交通车辆的纵、侧向运动意图。
为采集用于反应式车辆运动意图模型训练的数据, 同时保证试验的可操作性和可重复性, 基于dSPACE Simulator实时仿真系统和PanoSim汽车智能驾驶仿真平台建立了驾驶人在环车辆运动意图数据采集系统, 原理如图3所示[10]。
 | 图3 车辆运动意图数据采集系统Fig.3 Data acquisition platform for vehicle motion intention |
PanoSim汽车智能驾驶仿真平台是本团队自主研发的集车辆动力学、三维行驶环境、交通和车载环境传感模型等于一体的大型汽车模拟仿真软件平台, 具有试验设置主界面、车辆编辑器、场景编辑器、相机雷达安装器、画图与动画工具和模型自动生成工具等6大功能模块, 可实现高精度的车辆动力学模拟、道路与场景模拟、交通车辆模拟、雷达与相机模拟、无线通信模拟、天气模拟等, 可简便、直观地构建交通场景, 并能提供各种视角的动画显示, 支持纯软件仿真、硬件在环仿真和驾驶员在环仿真, 便于进行车辆运动意图数据采集。
选用dSPACE DS1006系统作为实时仿真模型处理器, 并实时接收由真实油门踏板、制动踏板和SensoWheel力矩方向盘输入的真实驾驶员操纵信息, 据此实时运行PanoSim软件模型, 可以得到交通车辆状态信息以及与主车的相对状态信息。
综合考虑道路拓扑结构的多样性、主车和交通车辆空间相对位置等因素, 选取道路轴线夹角α 为锐角的T形路、环岛、α 角为零的直线路等3种典型工况进行车辆运动意图数据采集试验, 如图4所示。试验时, 在PanoSim软件中预先设定工况环境, 令主车采用恒定速度沿图4中实线路径行驶。
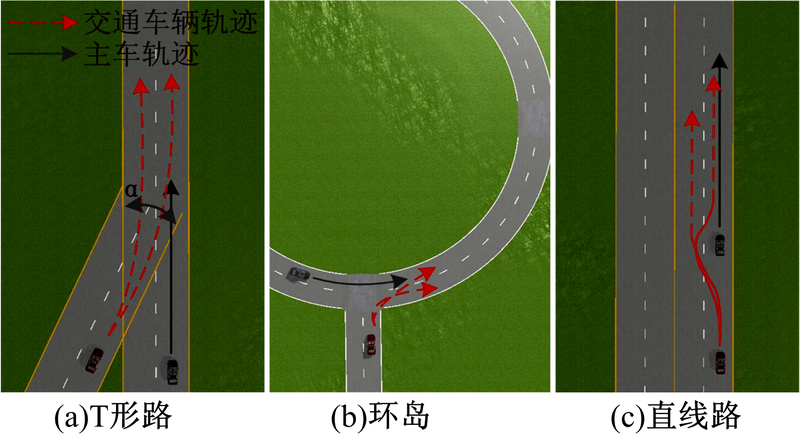 | 图4 车辆运动意图数据采集工况Fig.4 Test scenarios for vehicle motion intention data collection |
选取5名驾龄为2~8年的驾驶员进行车辆运动意图数据采集, 每名驾驶员在图4所示的3种典型工况下分别完成主车与交通车辆行为互不影响和主车与交通车辆行为相互影响两种情况的驾驶, 如图4中虚线所示, 每种工况分别测试10次。记录RMIM模型所需的本车状态信息以及与主车相对状态信息, 共计得到300组数据样本。
所采数据量纲不同会导致数值数量级存在较大差异, 易影响RMIM模型训练时参数矩阵的非奇异性, 故将各输入参数进行归一化处理, 在直线路、环岛和T形路下分别选取典型数据, 如图5所示。
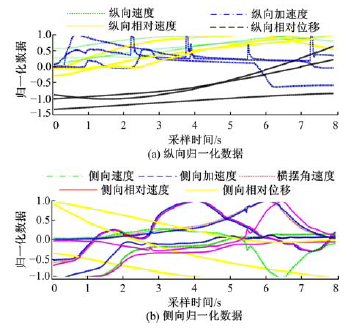 | 图5 典型的归一化后的试验采集数据Fig.5 Normalized input data of the test data |
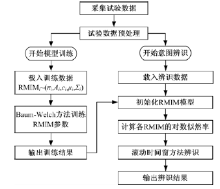
反应式车辆运动意图模型训练及辨识流程如图6所示。
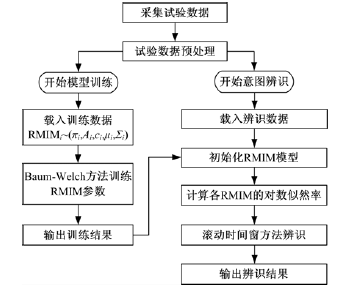 | 图6 RMIM模型训练及辨识流程图Fig.6 Training and identification process for RMIM model |
采用Baum-Welch方法[11]对RMIM模型进行训练, 获取交通车辆纵、侧向运动意图模型参数。用于训练的样本数共180组, 为采集数据量的3/5。训练时, 首先将试验数据进行筛选和分类, 交通车辆纵向和侧向反应行为意图分类原则如表1所示, 其中, 当1.9 s内模型中纵、侧向加速度的波形出现至少两次周期性变化时被视为小波动情况。由表1可见, 交通车辆运动意图的分类与道路拓扑结构及特定道路拓扑结构下的任意行为耦合区域均无关, 仅与当前时刻交通车辆状态及主车与交通车辆相对状态有关。
| 表1 模型训练数据分类原则 Table 1 Classification principles of model training data |
给定模型的隐状态维数、训练时间长度和高斯混合数, 对交通车辆的纵、侧向运动意图分别进行训练, 即可得到RMIM各子模型对应的模型参数:
λ lon, r=(π r, Ar, cr, μ r, Σ r)(16)
r=1, 2, 3, 4
λ lat, s=(π s, As, cs, μ s, Σ s)(17)
s=1, 2, 3, 4
利用训练得到的模型参数, 采用滚动时间窗方法进行交通车辆运动意图的辨识。将辨识数据输入RMIM模型, 分别计算各子模型对数似然率, 选取当前窗口纵、侧向子模型中最大似然函数值对应的反应行为意图作为当前时刻交通车辆的纵、侧向运动意图。将每次窗体计算的结果与实际情况进行对比, 累加所有正确的窗体数, 即可得出辨识准确率。
模型辨识过程中, 多维高斯混合数M、MGHMP过程对应的隐状态维数N、模型训练时间长度以及辨识时采用的滚动窗体长度是影响辨识结果的4个主要因素, 采用正交试验方法对这4个因素进行优化分析, 建立L9(34)标准正交表, 如表2所示。
| 表2 正交试验因素水平表 Table 2 Factor level table of orthogonal experiment |
用于辨识的样本数共120组, 为采集数据量的2/5。分别在T形路、环岛、直线路3种工况进行测试, 取3种工况对应的相同正交试验组号辨识结果的平均值, 得到交通车辆纵、侧向运动意图辨识结果, 如表3和表4所示。表中的ypv, v=1, 2, 3表示第p因素v水平对应的试验指标和;
Rp=max[
由正交试验结果可知, 在交通车辆纵侧向运动意图的辨识结果中, 主次因素顺序均为A、B、C、D; 分别选择纵向辨识情况下的A3B3C2D1组合, 及侧向辨识时情况下的A3B3C3D3组合时, 车辆运动意图辨识准确率最高。综上可知, A和B的最优组合均为A3B3组合; 作为次要因素的C和D, 其最优组合应为训练时间C大于窗体长度D的组合, 选择C2D1或C3D3组合均可, 最终选择A3B3C2D1作为交通车辆纵侧向运动意图辨识的正交优化参数组合。
| 表3 纵向运动意图辨识结果 Table 3 Longitudinal motion intention identification results |
| 表4 侧向运动意图辨识结果 Table 4 Lateral motion intention identification results |
利用选定的参数组合, 对T形路工况交通车辆运动意图进行辨识, 场景如图7所示, 主车与交通车辆均沿T形路行驶, 在T形路口后, 交通车辆驶入主车车道并在主车前同向直线行驶, 窗体滚动速度为0.1 s/次。
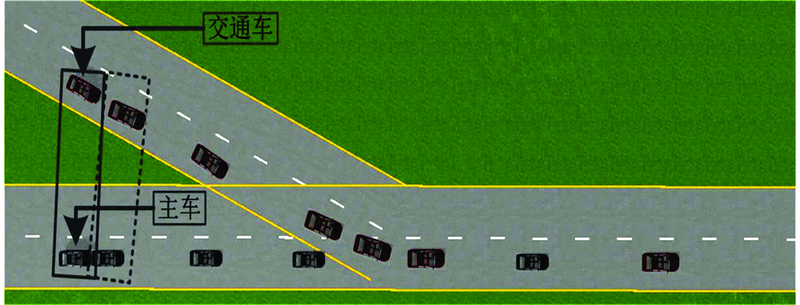 | 图7 T形路工况交通车辆运动意图辨识场景Fig.7 Test scenario of obstacle vehicle motion intention identification in T-junction |
交通车辆纵向运动意图辨识结果如图8所示。如图8可见, 开始的10个时间窗内, 交通车辆沿T形路向前行驶, 交通车辆与主车分别处在不同道路上, 交通车辆呈现纵向保持运动意图; 在10~48个时间窗内, 在T形路口交通车辆转向并超过主车的过程中, 交通车辆呈现纵向渐近运动意图。当交通车辆超过主车后的48~230个时间窗内, 交通车辆超过主车并依次呈现纵向渐远、犹豫和保持运动意图。经计算, 该T形路工况下对应的交通车辆纵向运动意图的辨识准确率为99.4%。
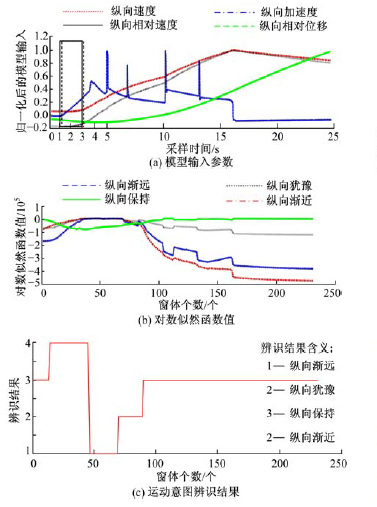 | 图8 交通车辆纵向运动意图辨识结果Fig.8 Identification results of obstacle vehicle longitudinal motion intention |
交通车辆侧向运动意图辨识结果如图9所示。
 | 图9 交通车辆侧向运动意图辨识结果Fig.9 Identification results of obstacle vehicle lateral motion intention |
由图9可见, 开始的10个时间窗内, 交通车辆沿T形路向前行驶, 交通车辆与主车分别处在不同道路上, 交通车辆呈现侧向渐近运动意图。在10~48个时间窗内, 在T形路口交通车辆转向并超过主车的过程中, 交通车辆呈现侧向渐近和保持运动意图, 且以侧向渐近反应运动意图为主。当交通车辆超过主车后的48~230个时间窗内, 交通车辆呈现侧向渐远运动意图。经计算, 该T形路工况下对应的交通车辆侧向运动意图的辨识准确率为99.5%。
综上, 基于RMIM模型的交通车辆运动意图辨识方法不依赖于特定工况, 可在较大距离范围内为主车提供准确的交通车辆运动意图信息, 可有效提高智能汽车的安全性, 该辨识方法具有普适性和规模可控性。
交通车辆运动意图不确定性是交通环境的主要不确定源, 对无人驾驶智能汽车的安全决策规划提出了巨大挑战。本文提出了一种基于反应式行为的车辆纵、侧向运动意图辨识策略, 建立了基于多维高斯隐马尔科夫过程的反应式车辆运动意图模型, 搭建了驾驶人在环的车辆运动意图信息采集系统, 分别在T形路、环岛、直线路3种典型工况下进行了数据采集, 利用采集的试验数据对RMIM模型进行了训练和辨识测试, 通过正交试验对模型关键参数进行了优化匹配分析。辨识结果表明, 通过合理选择参数组合, 辨识准确率可以达到99%以上。同时, 该方法辨识过程不依赖于特定工况, 可在全工况条件下为智能汽车决策与规划提供准确、可靠的交通车辆运动意图信息, 辨识方法具有普适性和规模可控性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|