
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于弹性连接结构的电动轮纵向振动特性
[毛钰 , 左曙光, 林福, 曹佳楠, 郑玉平]
, 左曙光, 林福, 曹佳楠, 郑玉平]
, 左曙光, 林福, 曹佳楠, 郑玉平]
|
|


作者简介:毛钰(1992-),男,博士研究生.研究方向:电动轮系统振动与控制.E-mail:maoyu1224@163.com
基于现有轮毂电机和轮辋刚性连接的电动轮结构形式,结合轮毂电机转矩波动激励和电动轮系统纵扭耦合振动模型揭示了轮胎和电机纵向振动问题,并确定了系统纵向振动所对应的主要参与模态,指出由于对振动主导的两阶旋转模态频率相距较大,电动轮系统在电机工作范围内整体振动特性较差。针对上述问题,采用轮毂电机和轮辋弹性连接的结构形式以规划电动轮系统模态特征。分析表明弹性连接能够降低电动轮系统两阶旋转模态频率并使二者相互靠近,进而能够缩短使电动轮系统产生共振的敏感电机转速范围,从而改善系统整体振动特性。最后通过连接参数对振动特性的影响分析确定了能够实现减振效果的弹性连接参数合理取值范围,为电动轮系统采用弹性连接构型进行优化设计提供了参考。
Considering the existing electric wheel structure with rigid connection between in-wheel motor and rim, the longitudinal vibrations of tire and in-wheel motor are revealed based on torque ripple of in-wheel motor and the coupled longitudinal- torsional vibration model of electric wheel system. The analysis of corresponding modes to longitudinal vibration indicates that, the overall vibration performance of the electric wheel system during motor operation range deteriorates due to the separation of two dominant rotational modes. Therefore, structure scheme with elastic connection between in-wheel motor and rim is adopted to deploy modal parameters of the electric wheel system. Comparative analysis shows that elastic connection structure results in lower and closer frequencies of the two dominant rotational modes, thus improving the overall vibration performance. The reasonable connection parameter ranges are determined through impact factors of the tire and in-wheel motor longitudinal vibration, providing reference for structure design of electric wheel for vibration attenuation purpose.
电动轮系统是由轮胎悬架、轮毂电机及其控制器组成的多体和多物理场系统, 电机的电磁激励与结构动力学的相互耦合作用使得电动轮系统涌现出新的动力学问题[1, 2, 3]。在电动轮系统动力学问题研究方面, Luo等[4]考虑了轮毂电机电磁激励特征, 分析了路面不平度激励和由于电机定转子动态偏心引起不平衡磁拉力耦合作用下电动轮垂向振动响应。Wang[5]、Sun[6]等主要针对开关磁阻电机不平衡磁拉力引起的电动轮动力学问题进行了研究。目前电动轮系统所表现出的垂向振动问题得到了较为广泛的研究, 但关于轮毂电机转矩特征引起的电动轮系统纵向动力学问题研究较少。清华大学李建秋等[7, 8]指出由于电动轮系统的转矩激励未经缓冲直接作用于轮胎将会引起轮胎滑移率和纵向力波动等动力学现象。张立军等[9]基于轮毂电机-轮胎总成非线性动力学模型分析了轮毂电机转矩波动引起的轮胎纵向接地力的阶次振荡。但上述研究都没有具体结合电动轮系统动力学特征对其纵向振动特性进行分析。
针对电动轮存在的动力学问题, 学者提出了相应的结构改进方案对系统特性进行优化。在电动轮系统结构改进优化方面, Nagya[10]采用动态吸振器形式的电动轮将轮毂电机质量转换为吸振器质量, 利用分离出来的电机质量进行吸振。马英等[11]利用弹簧阻尼机构实现了在轮毂电机与车轴之间安装直线电机的电动轮结构, 通过轮内主动减振改善了车辆平顺性和轮胎接地性能。罗玉涛等[12]提出了一种新型内置悬置系统的电动轮拓扑结构方案, 通过设置橡胶衬套将电机转化为与簧上质量并联的质量, 改善车辆垂向动力学特性。上述减振方案主要针对路面不平度激励引起的车辆垂向振动问题, 对于轮毂电机转矩波动激励下纵向振动问题的减振效果并未进行讨论, 而且在进行优化改进效果评价时仅分析了单一车速(或电机转速)下的振动特性, 未考虑整个电机工作转速范围内的效果。
为分析并改善电动轮纵向振动问题, 本文首先通过确定轮毂电机加速工况下转矩波动特征和建立电动轮系统纵扭耦合振动模型, 分析了现有轮毂电机和轮辋刚性连接的结构形式下电动轮系统纵向振动特性, 并结合模态特征解释了系统振动现象; 其次采用了轮毂电机和轮辋弹性连接的结构形式以规划电动轮系统模态特征, 对比分析了弹性连接结构的减振效果; 最后通过连接参数对振动特性的影响分析确定了能够实现减振效果的弹性连接参数合理取值范围。
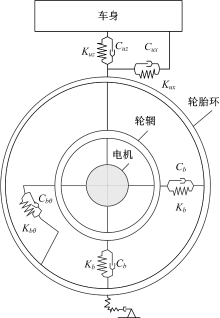
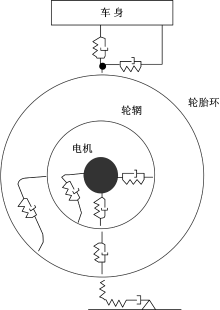
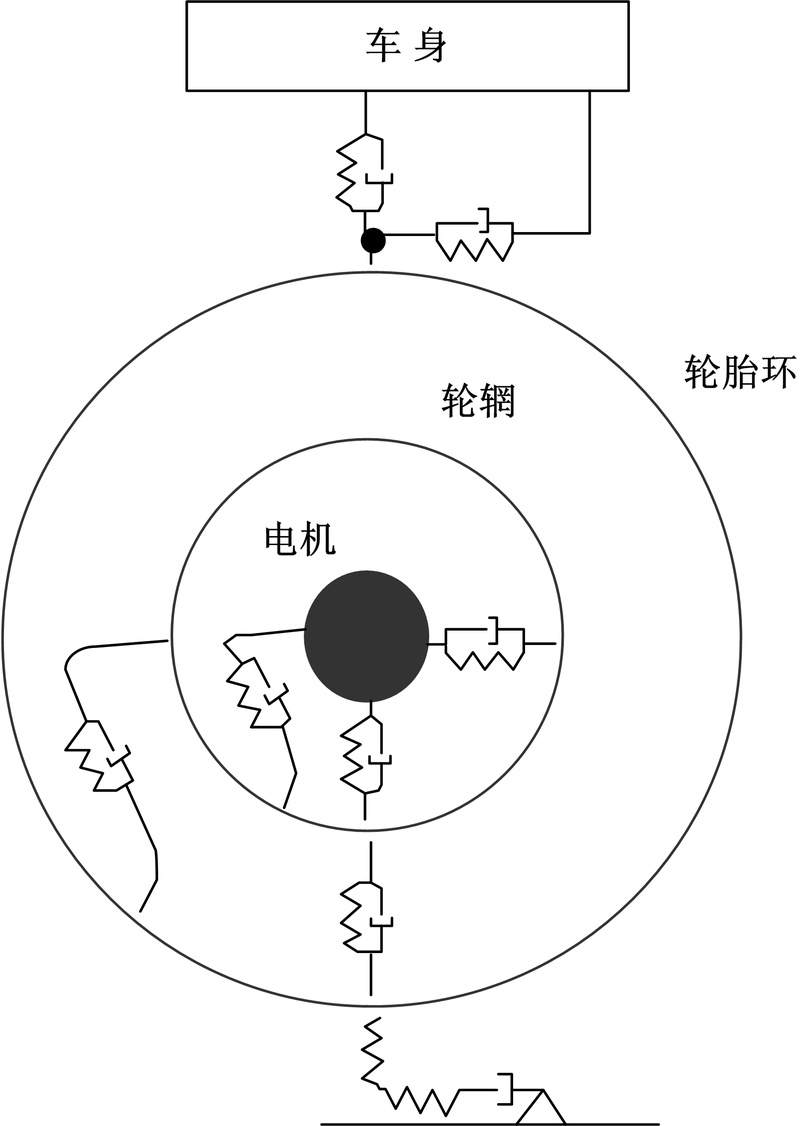
参考前期研究[13]建立基于刚性环轮胎模型的电动轮纵扭耦合动力学模型, 如图1所示, 具体为:轮胎等效为刚性的圆环, 与轮辋通过胎侧相连, 胎侧等效为径向和周向的刚度和阻尼; 轮辋和轮毂电机通过螺栓刚性相连, 二者等效为同一集中质量; 轮辋经悬架摆臂及衬套与车身在纵向连接, 根据Kelvin-Voigt模型将橡胶衬套等效为弹簧和阻尼器的并联。模型包括轮胎环和轮辋/电机等质量的面内扭转和纵向平移自由度以及车身的纵向平移自由度。轮胎扭转自由度和纵向平移自由度通过考虑轮胎松弛特性的瞬态刷子模型实现耦合。该模型对于反映轮毂电机转矩波动下电动轮振动特性的适用性已通过台架试验得到验证[14]。模型运动学方程如下所示:
式中:xb、xa分别为轮胎和轮辋/电机的纵向位移; θ b、θ a分别为轮胎和轮辋/电机的旋转角; Fcx为轮胎的纵向力; Re为轮胎半径; mb、ma、md、mu分别为轮胎、轮辋、电机和1/4车身的质量; Iby、Iay、Idy分别为轮胎、轮辋和电机的转动惯量; kb、cb分别为轮胎的纵向刚度和阻尼; kbθ 、cbθ 分别为轮胎的旋转刚度和阻尼; kux、cux分别为悬架衬套的刚度和阻尼; kc、cc分别为胎面的纵向刚度和阻尼。电动轮模型参数如表1所示。
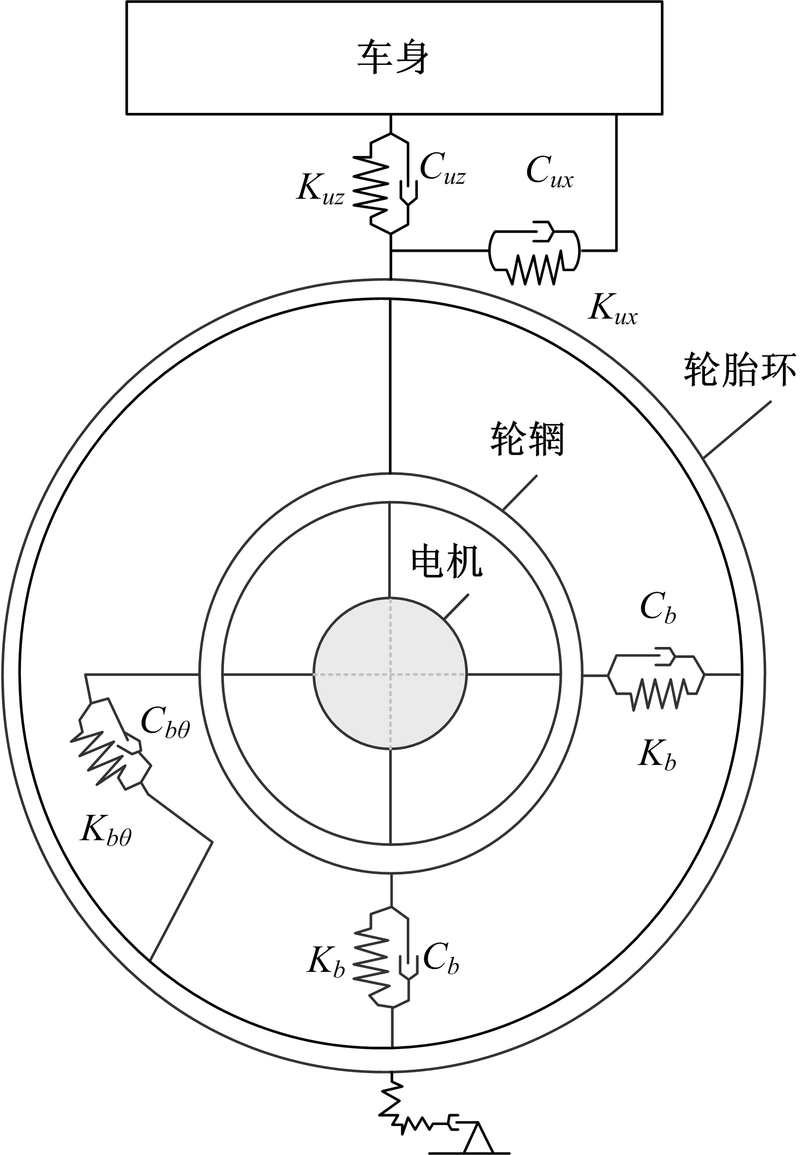 | 图1 基于刚性连接电动轮系统模型Fig.1 Electric wheel model based on rigid connection |
| 表1 电动轮结构及电机相关参数 Table 1 Parameters of electric wheel model |
根据线性系统理论可确定系统极点, 具体可参考文献[15], 并进而得到模态参数如表2所示。
| 表2 刚性连接电动轮模态参数 Table 2 Modal parameters of electric wheel with rigid connection |
本文所研究的电动轮采用的轮毂电机为永磁同步电机, 其转矩波动主要来源于永磁体磁场非正弦分布、齿槽转矩及电流谐波, 该电机为分数槽集中绕组永磁同步电机, 由于前期经过斜槽等结构改进优化, 其转矩波动受永磁体磁场非正弦分布、齿槽转矩的影响比较小, 主要取决于供电电流谐波, 因此忽略电机结构特征, 理想电机电磁转矩模型为:
式中:id(iq)为d(q)轴电流; ia、ib、ic分别为A、B、C三相电流; θ 为电机电角度; Te为电机输出电磁转矩。相关参数如表1所示。
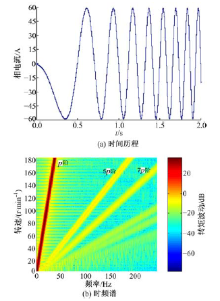
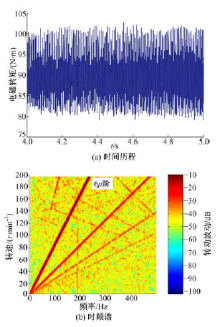
根据仿真得到加速过程中的电机相电流, 然后由式(2)确定轮毂电机电磁转矩, 分别如图2、3所示。
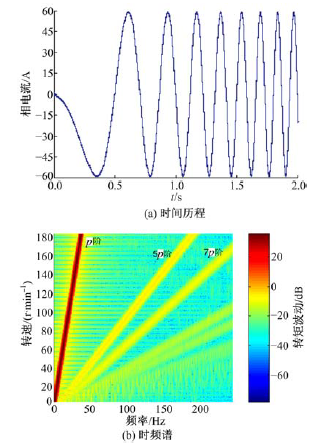 | 图2 电机相电流信号Fig.2 Phase current of in-wheel motor |
 | 图3 电机转矩信号Fig.3 Electromagnetic torque of in-wheel motor |
由图2、图3可知, 电机相电流中除主导的基频外还存在基频5、7倍等谐波成分, 电流谐波进而引起电机输出转矩波动, 波动具有阶次特征, 主要阶次为电流基频的6阶(对应转频的6p=72阶)。转矩波动直接作用于车轮将引起电动轮系统振动问题。
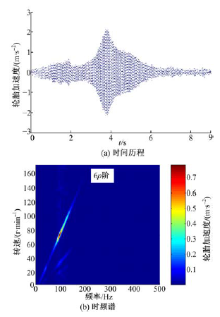
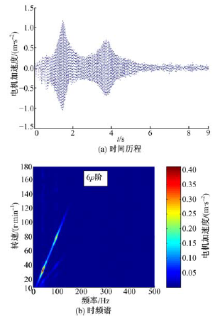
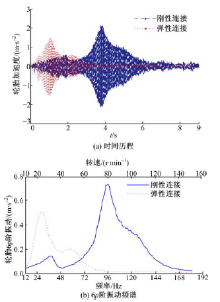
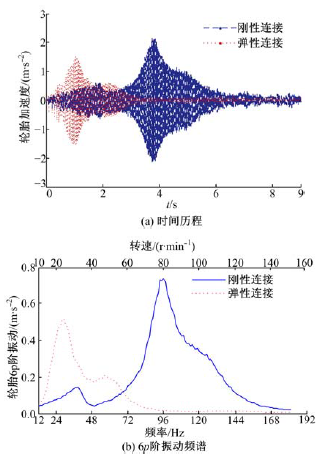
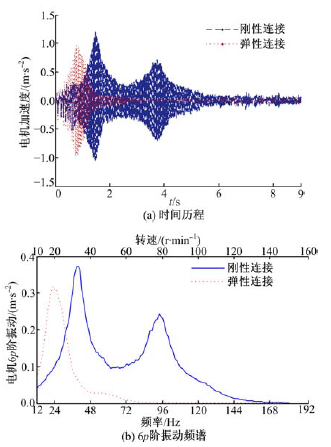
考虑到轮毂电机转矩波动具有阶次特征, 即转矩波动频率与转速成正比, 为反映电动轮在整个频段内的振动特性, 选取加速工况进行分析。将图3所示的轮毂电机转矩波动作用于电动轮纵扭耦合模型仿真得到了系统振动响应。图4、图5分别为转矩波动激励下轮胎和电机纵向振动加速度结果, 在转矩波动下系统表现出阶次振动, 主要振动阶次为转频的6p阶。
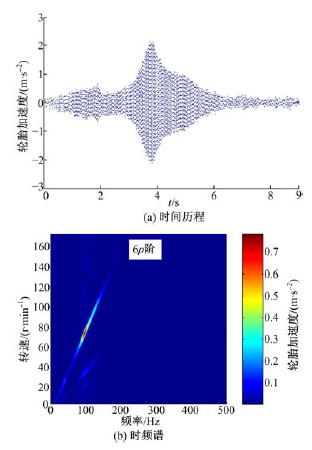 | 图4 轮胎加速度信号Fig.4 Tire acceleration |
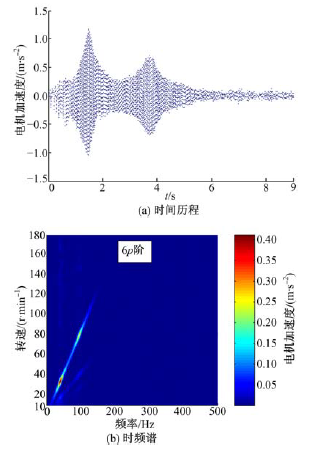 | 图5 电机加速度信号Fig.5 Motor acceleration |
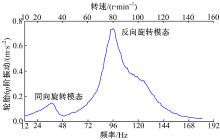
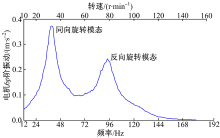
提取轮胎和电机6p阶振动切片分别如图6、图7所示, 轮胎振动主要集中在96 Hz, 对应车轮和轮胎反向旋转模态; 电机振动主要集中在40 Hz, 对应车轮和轮胎同向旋转模态。电动轮同向和反向两阶旋转模态对应频率相差较大, 使电动轮系统产生共振的敏感电机工作转速范围较宽(30~35 r/min和80~100 r/min), 电机转速为33 r/min时, 转矩波动(频率为40 Hz)激发电动轮同向旋转模态, 从而使电机振动显著增加; 电机转速为80 r/min时, 转矩波动(频率为96 Hz)激发电动轮反向旋转模态, 从而使轮胎振动变得突显。针对上述问题, 本文考虑轮辋和电机弹性连接的结构形式对电动轮系统纵向振动特性进行优化。
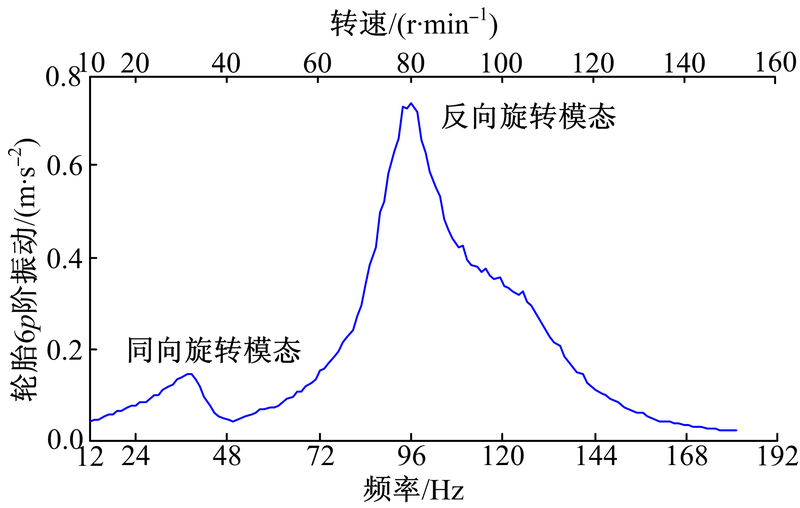 | 图6 轮胎6p阶振动Fig.6 6pth order vibration of tire |
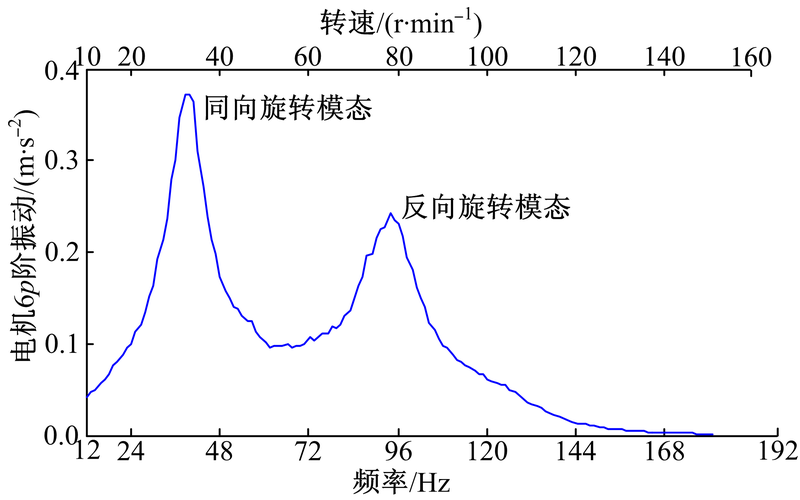 | 图7 电机6p阶振动Fig.7 6pth order vibration of motor |
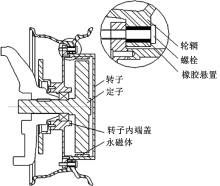
图8为考虑弹性连接改进后的电动轮结构。轮毂电机内定子采用悬臂方式通过轴承支撑于转子内端盖, 并通过花键与转向节进行装配实现其固定, 附有表贴式永磁体的转子与转子内端盖通过螺栓连接为一体, 转子内端盖与轮辋内缘通过螺栓连接, 圆周方向均布有5个螺栓以实现转矩从转子到轮辋的传递, 并且在连接处填充橡胶材料构成扭转减振结构以实现转矩的柔性传递。相较于刚性连接布置形式, 弹性连接方案在电动轮动力传递中引入缓冲减振结构, 从而能够改善电动轮系统振动特性。
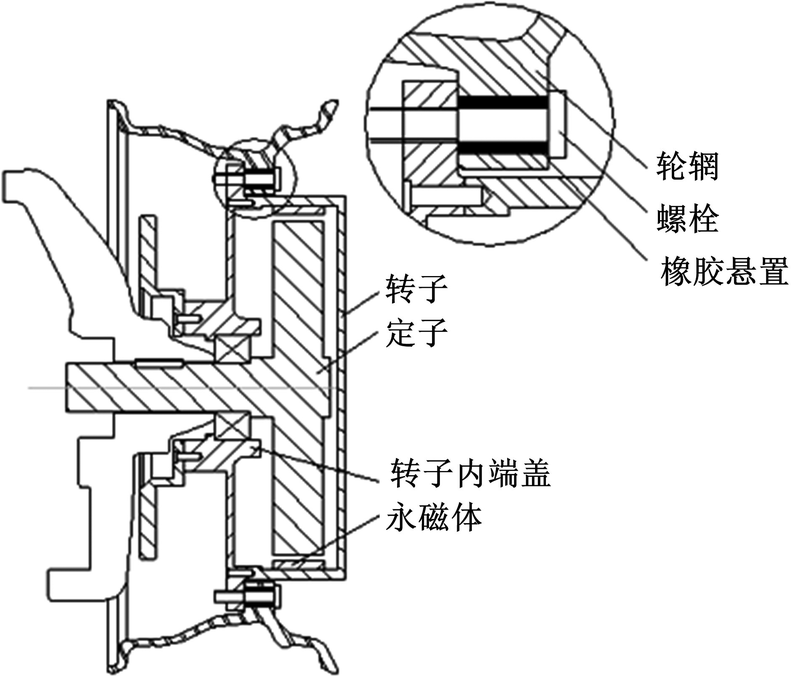 | 图8 考虑弹性连接的电动轮结构Fig.8 Electric wheel structure based on elastic connection |
考虑轮辋和电机在径向和周向的连接弹性得到如图9所示的改进电动轮系统模型, 与刚性连接模型不同之处在于轮辋和电机为通过弹簧连接的两个集中质量, 因此模型包括轮胎环、轮辋、电机等质量的面内扭转和纵向平移自由度以及车身的纵向平移自由度。模型运动学方程为:
式中:xa、xd分别为轮辋和电机的纵向位移; θ a、θ d分别为轮辋和电机的旋转角; kd、cd分别为轮辋和电机的等效纵向连接刚度和阻尼;
参照文献[12]根据经验仿真时设置k=6× 104 N/m, c=100 N· s/m。
 | 图9 基于弹性连接的电动轮系统模型Fig.9 Electric wheel model based on elastic connection |
由式(3)确定的考虑弹性连接的电动轮纵扭耦合振动方程是线性定常的, 基于线性系统理论进行分析确定电动轮系统模态特征如表3所示。
| 表3 弹性连接电动轮模态参数 Table 3 Modal parameters of electric wheel with elastic connection |
考虑弹性连接后释放了轮辋的纵向平移和周向旋转自由度, 因此相对刚性连接增加了第6和第7阶模态, 振型即表现为轮辋的纵向平移和周向旋转。另外, 考虑弹性连接后对电动轮系统振动贡献较大的两阶旋转模态对应频率有所降低, 而且相互靠近; 同时由于橡胶悬置的阻尼作用, 两阶旋转模态阻尼比有所增加。
将轮毂电机转矩波动施加于考虑弹性连接的电动轮系统模型, 得到轮胎和电机纵向加速度响应, 并与刚性连接时的振动响应进行对比, 如图10、图11所示。
新增的6、7两阶轮辋运动模态对系统振动贡献较小, 在轮胎和电机纵向振动中占主导作用的仍然是电动轮旋转模态, 由于两阶旋转模态频率降低, 弹性连接电动轮结构形式下轮胎和轮辋振动峰值往低频移动, 即弹性连接结构形式能够有效衰减转矩波动引起的在45 Hz和100 Hz附近的中频振动, 但同时会在24~30 Hz低频处引起系统共振, 低频振动峰值较之前的中频振动峰值小。在弹性连接情况下电动轮系统出现的两处主导共振频率更为接近, 其敏感转速范围(20~25 r/min)相比刚性连接时的敏感转速范围更窄, 在整个电机工作转速范围内产生的振动影响更小。
 | 图10 刚性连接与弹性连接时轮胎振动加速度对比Fig.10 Comparison of tire vibration between rigid and elastic connection |
 | 图11 刚性连接与弹性连接时电机振动加速度对比Fig.11 Comparison of motor vibration between rigid and elastic connection |
轮毂电机和轮辋弹性连接布置改变了电动轮系统模态频率分布, 使对系统振动贡献较大的两阶旋转模态往低频移动, 因此在电机整个工作转速范围内能够有效衰减原模态频率(100 Hz)附近的中频振动, 但同时会在较低频率处出现新的共振峰值。弹性连接结构通过规划电动轮系统模态特征为其振动特性的优化提供了更大的空间, 为合理设计弹性连接结构需研究连接参数对电动轮系统模态参数及振动特性的影响。
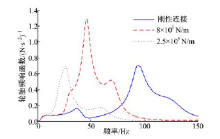
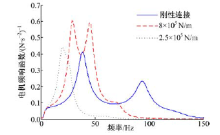
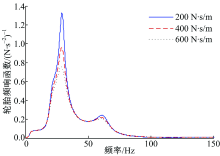
图12、图13分别为不同连接刚度轮胎和电机频响函数对比。连接刚度会对电动轮系统在整个频段内的振动产生影响, 随着连接刚度的减小, 轮胎和电机的共振峰往低频移动, 当连接刚度较大时, 新出现的共振峰值较刚性连接时更显著, 对整个频段内系统振动特性而言, 弹性连接并未有效衰减振动, 如表4所示, 对于该连接参数转矩波动下轮胎和电机振动均方根值相比刚性连接时有一定的增加; 当刚度较小时, 共振峰值明显下降,
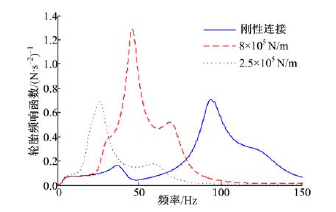 | 图12 不同连接刚度下轮胎频响函数Fig.12 Frequency response of tire vibration under different connection stiffness |
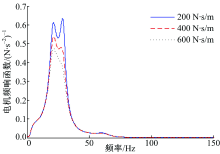
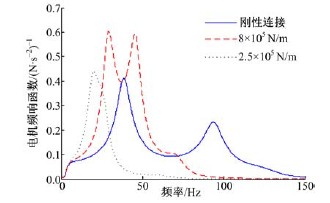 | 图13 不同连接刚度下电机频响函数Fig.13 Frequency response of motor vibration under different connection stiffness |
而且共振带宽较小, 相对刚性连接在整个频带内振动影响更小, 如表4所示, 轮胎和电机振动加速度均方根值有所下降。因此为使弹性连接结构能够具有较好的减振效果, 弹性连接刚度需控制在一定范围内。
| 表4 振动均方根值对比 Table 4 Comparison of vibration RMS under different connection stiffness |
图14、图15分别为不同连接阻尼下轮胎和电机的频响函数对比。连接阻尼的改变不影响共振出现的频率, 仅对共振峰幅值有影响, 随着阻尼的增加, 旋转模态频率处的共振峰值有一定的下降。
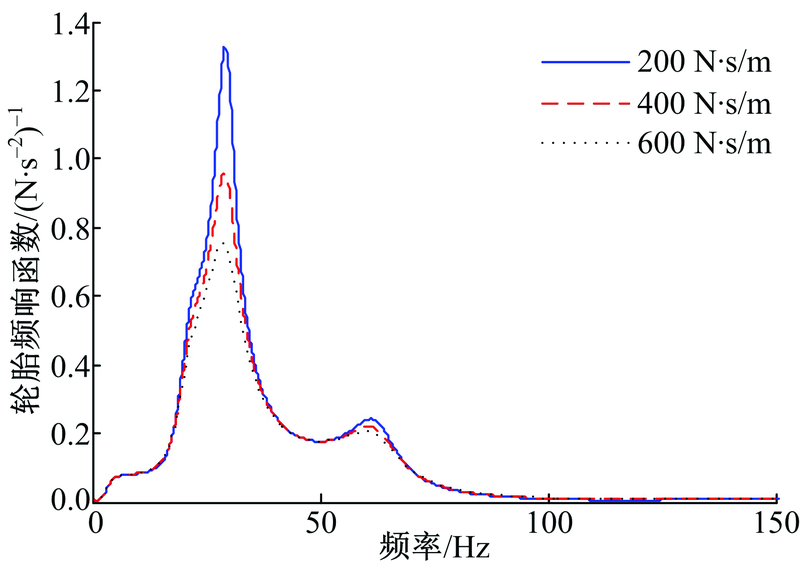 | 图14 不同连接阻尼下的轮胎频响函数Fig.14 Frequency response of tire vibration under different connection damping |
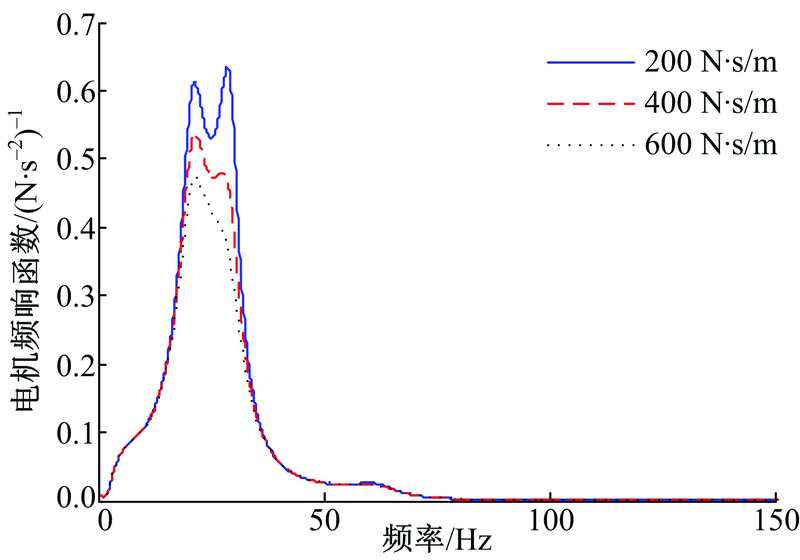 | 图15 不同连接阻尼下的电机频响函数Fig.15 Frequency response of motor vibration under different connection damping |
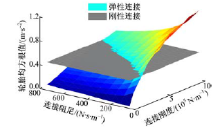
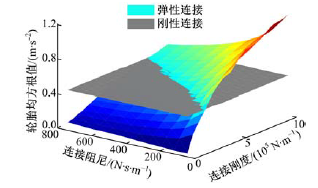
为进一步确定能够使弹性连接结构具有较好减振效果的连接参数取值范围, 仿真得到转矩波动下轮胎和电机纵向振动加速度均方根值随弹性连接参数变化分别如图16、图17所示。由于连接刚度会改变电动轮系统各共振峰的相对位置和幅值, 从而对整个频段内的振动产生影响, 而连接阻尼只改变共振峰幅值, 仅影响旋转模态频率处的振动, 所以连接刚度比连接阻尼对电动轮系统振动影响大, 振动指标随连接刚度变化更明显。轮胎和电机振动指标随连接刚度增加而增加, 当连接阻尼较小时其增加趋势更明显。轮胎和电机振动指标随连接阻尼增加而降低, 当阻尼增加到一定程度时其变化趋于平缓。
 | 图16 轮胎振动均方根值随连接参数的变化Fig.16 Variations of tire vibration RMS with connection parameters |
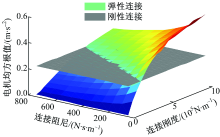
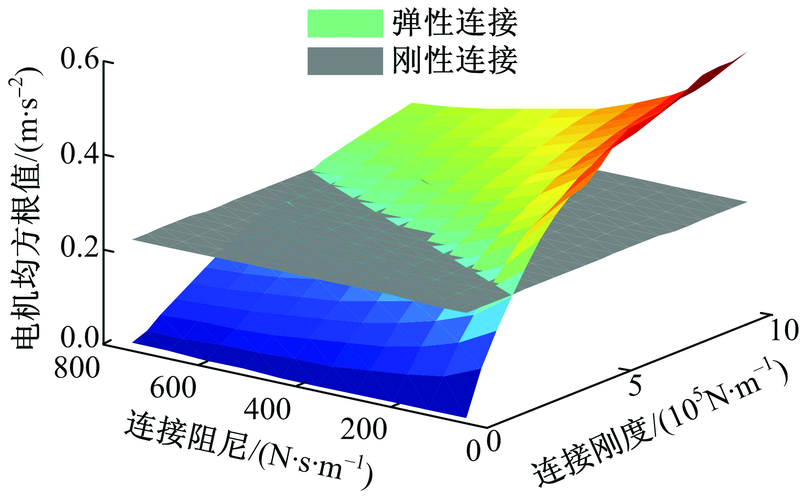 | 图17 电机振动均方根值随连接参数的变化Fig.17 Variations of motor vibration RMS with connection parameters |
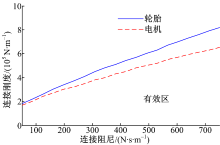
图16、图17中灰色平面为刚性连接时轮胎和电机加速度均方根水平, 由图中曲面交线确定合理的弹性连接参数范围如图18所示。为使弹性连接结构具备减振效果应使弹性连接刚度较低而连接阻尼较大, 即图中虚线下方, 而且越靠近右下角区域其减振效果越好。但考虑到动力传递的可靠性需求和相对运动空间的限制, 连接刚度不宜过小, 基于上述因素可进一步缩小连接参数的有效区域。
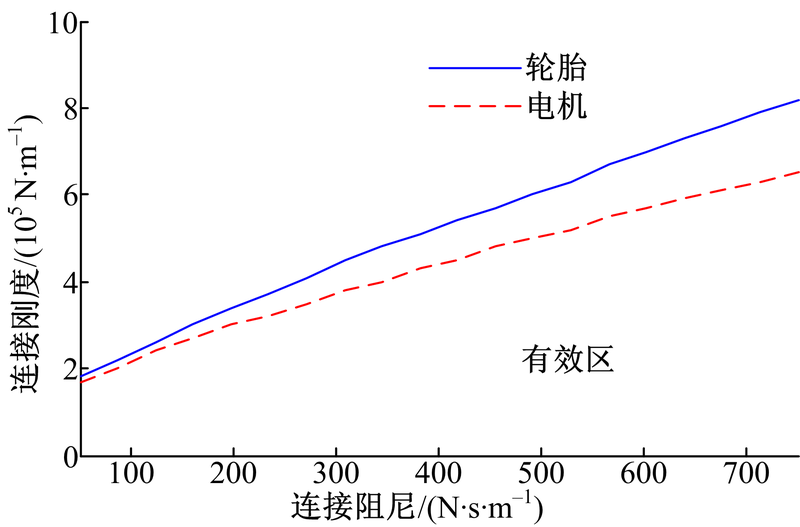 | 图18 连接参数有效取值区间Fig.18 Effective area of connection parameters values |
(1)轮毂电机转矩波动激励下电动轮系统表现出纵向振动, 对振动贡献较大的模态为轮胎和车轮间的同向旋转和反向旋转模态。在现有刚性连接结构下由于两阶旋转模态频率相距较大, 电动轮系统在电机工作范围内整体振动特性较差。
(2)采用轮毂电机和轮辋弹性连接的结构方式能够降低电动轮系统两阶旋转模态频率并使二者相互靠近, 因此在电机整个工作转速范围内能够有效衰减原模态频率(100 Hz)附近的中频振动, 缩短了使电动轮系统产生共振的敏感电机转速范围, 根据连接参数的影响规律进一步确定电动轮弹性连接参数的合理取值范围, 本文的研究为电动轮系统采用弹性连接构型进行优化设计提供了参考。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|