


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
双半挂汽车列车转弯运动轨迹仿真分析
[王郭俊 , 许洪国, 刘宏飞]
, 许洪国, 刘宏飞]
, 许洪国, 刘宏飞]
|
|


作者简介:王郭俊(1990-),男,博士研究生. 研究方向:多挂汽车列车动力学仿真. E-mail:wangguoyl@qq.com
建立了双半挂汽车列车的运动学模型,给出了其转弯运动轨迹的一种求解方法,并用MATLAB软件仿真得到各个车辆单元,包括牵引车前轴和后轴、第一节半挂车后轴和第二节半挂车后轴转弯运动的轨迹。最后通过不同结构参数包括半挂车轴距和铰接点位置的设定,对比分析了各轴中点运动轨迹的变化;研究结果表明,对半挂车后轴进行主动转向控制,能有效改善双半挂汽车列车的转向灵活性和运行稳定性。
The kinematics model and solving algorithm of turning trajectory of B-double vehicles are proposed. The trajectories of the front and rear axles of the tractor, the rear axle of the first semitrailer and the rear axle of the second semitrailer are simulated using MATLAB. By changing the structurla parameters including the wheel base of the semitrailers and the position of the articulated point, comparative analysis of the trajectory of each axle center is carried out. Results show that by control of the corner of rear axle of the semitrailer, the handling stability and the flexible steering of B-double vehicles can be improved.
国外汽车列车在大型物流运输中扮演着至关重要的角色。双半挂汽车列车运输形式, 可有效提高运输效率, 减少燃油消耗, 具有较好的经济效益。目前, 国内大宗货物运输普遍以半挂汽车列车运输为主。在新修订的GB1589-2016中, 半挂车的许用长度由13 m变为13.75 m, 取消了整体封闭式厢式半挂车、低平板半挂车和集装箱半挂车的长度限制特例, 尤其新增了车型品种, 包括中置轴车辆运输车及其列车、中置轴货运挂车及其列车和长头铰接列车等[1]。因此, 研究双半挂汽车列车在转弯运动过程中的轨迹特性, 对我国物流及道路运输的未来发展有重要意义。
裴金[2]改进了牵引车前轮轨迹在牵引车坐标系中迁移的数学模型, 提出了半挂车后轮转角的一种控制方式, 使之能够适用于任意弯道, 使半挂车后轴中点能完全跟踪牵引车前轴中点的轨迹; 对各种外部干扰引起的误差予以自动矫正, 并通过仿真分析验证了其理论。郑旺辉[3]在半挂车后轮转向原理的基础上, 给出了汽车折角、牵引车和半挂车的轨迹偏差计算方法和公式; 以试验样车为例, 提出了减小这种运动轨迹偏差的方法。林熊熊[4, 5]通过建立半挂和全挂汽车转弯模型, 并引申出汽车全轮转向运动轨迹的一种算法, 进而给出了一种统一解法。许言等[6]基于半挂汽车列车的弯路转向理论, 提出了半挂车后轮弯路行驶轨迹跟踪模型, 并通过SIMULINK仿真验证了汽车列车模型的正确性。王新建等[7]提出了通过一种控制汽车列车折角的方法, 使得汽车列车具有良好的轨迹跟踪性。Nayl 等[8]研究了在不同速度和质心侧偏角的情况下, 运动学模型转化为容错性动力学模型, 用模型预测控制器实现汽车列车的轨迹跟踪问题。Jujnovich等[9]构建了重型汽车列车的运动学模型, 在低速和高速情况下运用非线性控制器使挂车主动转向, 实现轨迹跟踪问题。游峰等[10]建立了欠驱动汽车列车动力学模型, 应用滑模变结构理论给出了车辆系统状态变量向超平面收敛的方法, 对平滑运动轨迹和小曲率转弯半径的轨迹有良好的跟踪能力。段斌等[11]根据国标中对外摆值的定义、限值和实验测试方法, 对外摆值的数值计算方法进行了研究, 利用TruckSim仿真和实车试验对此算法进行了验证, 为半挂汽车列车的通过性研究提供了一种思路。刘朝涛[12]通过ADAMS建立了具有两节全挂车的汽车列车的运动学和动力学模型, 建立了列车的转向控制MATLAB模型, 通过联合仿真对主动转向汽车列车的可行性、优越性进行了验证。龙佳庆等[13]建立了半挂汽车列车TruckSim模型; 仿真结果表明, 适当增加牵引车的质量, 加长牵引车轴距、加长半挂车轴与牵引车前轴的距离、降低挂车质量、缩短铰接点到牵引车前轴的距离, 会增加不足转向特性的趋势。
目前, 国内外多数研究半挂汽车列车的运行轨迹及其跟踪问题, 包括通过运动学模型和动力学模型来求解轨迹; 少数研究了多挂汽车列车轨迹, 但主要通过汽车动力学软件直接进行求解和验证, 鲜有讨论挂车后轴主动转向对汽车列车行驶轨迹的影响。双半挂汽车列车车辆单元多, 车身长, 在转弯运动中存在后部放大效应, 轨迹跟踪性较差, 通道圆增大。为了仿真实时转弯运动轨迹, 本文通过构建汽车列车运动学模型, 改变车辆参数和控制半挂车后轴主动转向, 改善汽车列车转向灵活性和行驶稳定性, 并对其轨迹的影响进行了研究。
假定双半挂汽车列车低速运行, 3个车辆单元运行在同一平面上, 轮胎侧偏特性在线性范围内变化。为便于对其运动学性能进行研究, 可忽略路面不平度、转向系、轮胎侧偏、车身侧倾等因素, 将左右两侧轮胎简化为集中到车身中轴线的一个轮胎, 形成双半挂汽车列车的单轨模型, 如图1所示。
 | 图1 双半挂汽车列车运动学模型Fig.1 Kinematics model of B-double vehicles |
3个车辆单元可简化为3个不计质量的AB、CD和EF。A、B、C分别为牵引车前轴的中点、后轴的中点和铰接点, D和E分别为第一节半挂车后轴的中点和铰接点, F为第二节半挂车后轴的中点。其中, D和F为受控点, 可分别控制两节半挂车后轴轮胎的转向角度。AB和A1B1为牵引车当前时刻和下一时刻的位置, CD和C1D1为第一节半挂车当前时刻和下一时刻的位置, EF和E1F1为第二节半挂车当前时刻和下一时刻的位置。其中A点坐标为(x1, y1), 极径为OA(OA1), B点坐标为(x2, y2), 极径为OB(OB1), C点坐标为(x3, y3), 极径为OC(OC1), D点坐标为(x4, y4), 极径为OD(OD1), E点坐标为(x5, y5), 极径为OE(OE1), F点坐标为(x6, y6), 极径为OF(OF1)。
采用直角坐标和极坐标相结合的计算方法, 预设步长, 每迭代一次可求出各个车辆单元对应各点的新坐标, 运行结束便可求出车辆转弯运动轨迹。
根据几何关系, 有
OB1=
根据极限定义, 有
OB1=
∠B1OB很小时, ∠B1BO≈ ∠ABO, 故视其为常量。此时B1点的极径为
OB1=OB· exp
B1点坐标的表达式为:
A点为牵引车前轴的中点, 控制着双半挂汽车列车的运行路径。设A运行轨迹的半径为R, 则A点的极径为OA1=OA=R。
∠A1OB1=arccos
导出A1点的极角为:
∠A1Ox=∠B1Ox+∠A1OB1(7)
A1点坐标的表达式为:
牵引车分别以90° 、180° 、270° 和360° 驶出弯道, A1的终点坐标表达式分别为:
根据几何关系, 有:
∠A1B1O=arccos
OC1=
∠C1OB1=arcsin
导出C1点的极角为:
∠C1Ox=∠C1OB1+∠B1Ox(16)
C1点坐标的表达式为:
根据几何关系, 有
∠C1OD=∠C1Ox+∠DOx(18)
C1D=
(19)
∠C1DO=arccos
∠C1DC=∠CDO-∠C1DO=∠CDO-arccos
DD1=C1Dcos(∠C1DC+∠CDD1)-
(22)
OD1=
(23)
∠D1OD=arcsin
导出D1点的极角为:
∠D1Ox=∠DOx+∠D1OD(25)
D1点坐标的表达式为:
∠C1D1O=arccos
式(27)中∠C1D1O在下一时刻替代式(20)中的∠C1DO。
根据几何关系, 有:
OE1=
(28)
∠E1OD1=arcsin
导出E1点的极角为:
∠E1Ox=∠E1OD1+∠D1Ox(30)
E1点坐标的表达式为:
2.6 F点坐标计算
∠E1OF=∠E1Ox+∠xOF(32)
E1F=
∠E1FO=arccos
∠E1FE=∠EFO-∠E1FO=∠EFO-arccos
FF1=E1Fcos
OF1=
(37)
∠F1OF=arcsin
导出F1点的极角为:
∠F1Ox=∠FOx+∠F1OF(39)
F1点坐标的表达式为:
∠E1OF1=arccos
式(41)中∠E1F1O在下一时刻替代式(34)中的∠E1FO。
如图2所示, α 为牵引车坐标系X1BY1与大地坐标系XOY的夹角, α 1为第一节半挂车坐标系X2DY2与大地坐标系XOY的夹角, α 2为第二节半挂车坐标系X3FY3与大地坐标系XOY的夹角。θ 1为牵引车与第一节半挂车的铰接角, 取其锐角值。δ 1为第一节半挂车后轴轮胎的主动转角, 与θ 1成正比, 比例系数为K1。θ 2为两节半挂车之间的铰接角, 取其锐角值。δ 2为第二节半挂车后轴轮胎的主动转角, 与θ 2成正比, 比例系数为K2。上述各量的计算式为:
 | 图2 三个车辆单元的坐标系Fig.2 Coordinate systems for three vehicle units |
根据A点的终点坐标, 上述计算过程有4种驶出弯道的情况, 仿真结果如图3所示。双半挂汽车列车的结构参数[14], 见表1。
由直线过渡到弯道行驶, B点和D点向圆周内侧偏移, 其轨迹半径小于A点的轨迹半径。F点向圆周外侧偏移, 其轨迹半径大于A点的轨迹半径, 此时F点与A点的轨迹偏差为后摆值。进入弯道后, D点跟随B点的轨迹, F点跟随A点的轨迹, 其中B点和D点的轨迹半径小于A点和F点的轨迹半径。由弯道过渡到直线行驶, F点向圆周内侧偏移, 不再跟随A点, 其轨迹半径减小, 此时F点与A点轨迹的偏差为前摆值。F点轨迹半径驶入弯道时变大, 驶出弯道时减小, 表明存在后部放大效应(RWA)。
 | 图3 双半挂汽车列车各轴中点弯道运动轨迹Fig.3 Simulation results for each axle center trajectory of B-double vehicles |
| 表1 双半挂汽车列车结构参数 Table 1 Structural parameters for B-double vehicles |
3.2.1 半挂车轴距的影响
轴距CD和EF的参数变化, 见表2。
| 表2 半挂车轴距参数变化 Table 2 Wheel base variables of semitrailersm |
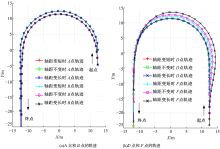
以180° 圆周运动为例, 如图4(a)所示, A点和B点的轨迹不变, A点的轨迹半径比B点大。如图4(b)所示, 轴距CD和EF变短, D点和F点向前偏移。由直线过渡到弯道行驶以及进入弯道后, D点的轨迹变化幅度小, F点向圆周内侧偏移, 外摆值减小。由弯道过渡到直线行驶, D点和F点向圆周外侧偏移, 前摆值减小。轴距CD和EF变长, D点和F点向后偏移。由直线过渡到弯道行驶以及进入弯道后, D点的轨迹变化幅度小, F点向圆周外侧偏移, 外摆值增大。由弯道过渡到直线行驶, D点和F点向圆周内侧偏移, 前摆值增大。D点和F点的轨迹变化趋势相同, 但F点的变化幅度比D点大, 表明存在后部放大效应。
 | 图4 半挂车轴距CD、EF变化时的各轴中点轨迹Fig.4 Each axle center trajectory with wheel base variables of semitrailers |
3.2.2 铰接点位置的影响
铰接点C和E的位置发生变化[14], 即CB和ED的长度发生变化, 见表3。
| 表3 铰接点位置变化 Table 3 Articulated point position variables |
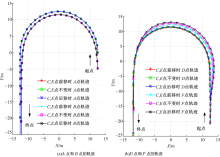
以180° 圆周运动为例, 如图5(a)所示, A点和B点的轨迹不变, A点的轨迹半径比B点大。如图5(b)所示, CB和ED变长, 即C点和E点向前移动时, D点和F点向前偏移。由直线过渡到弯道行驶以及进入弯道后, D点和F点向圆周内侧偏移, 外摆值减小。由弯道过渡到直线行驶, D点和F点的轨迹变化幅度小。CB和ED变短, 即C点和E点向后移动时, D点和F点向后偏移。由直线过渡到弯道行驶以及进入弯道后, D点和F点向圆周外侧偏移, 外摆值增大。由弯道过渡到直线行驶, D点和F点的轨迹变化幅度小。D点和F点的轨迹变化趋势相同, 但F点的变化幅度比D点大, 表明存在后部放大效应。
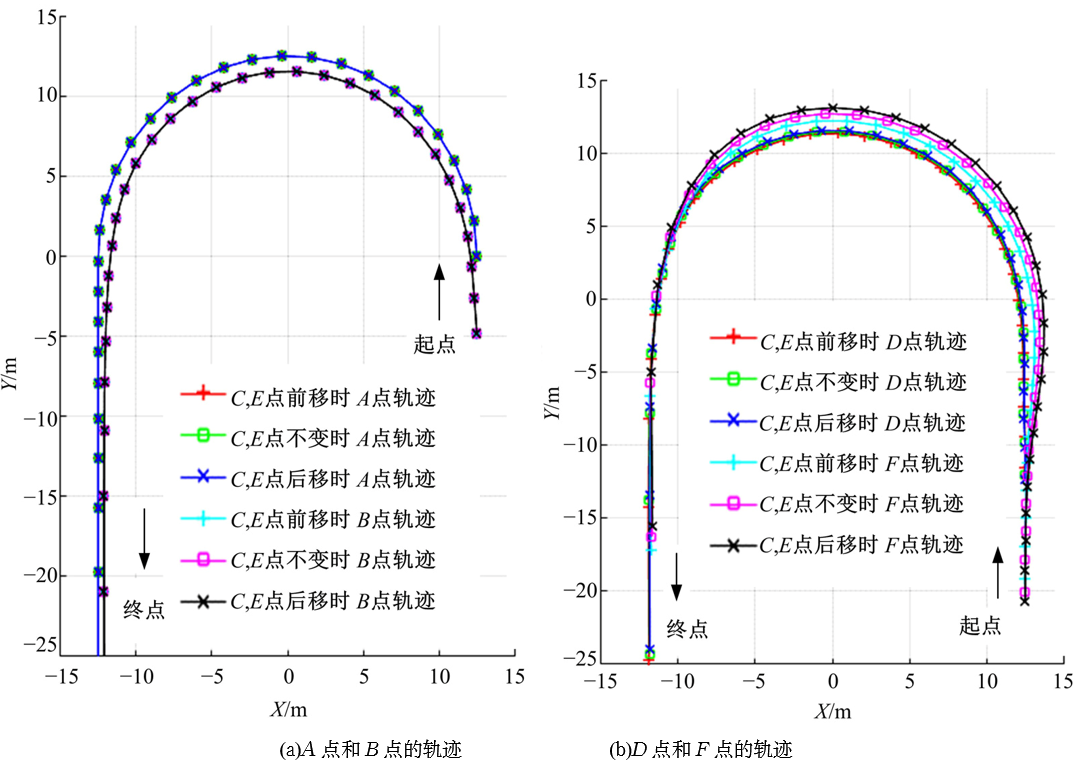 | 图5 铰接点C、E位置变化时的各轴中点轨迹Fig.5 Each axle center trajectory with articulated point position variables |
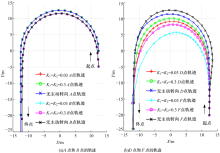
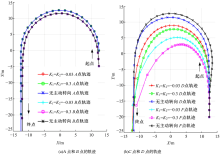
低速工况下, 后轴轮胎的主动转角方向与牵引车前轴相反, 以减小转弯半径, 提高转向灵活性。高速工况下, 后轴轮胎的主动转角方向与牵引车前轴相同, 以降低横摆角速度, 提高操纵稳定性[15]。
以180° 圆周运动为例, 低速工况下, D点和F点主动异向转向, 转向比例系数K1和K2取正值。如图6(a)所示, A点和B点的轨迹不变, A点的轨迹半径比B点大。如图6(b)所示, D点和F点向圆周内侧偏移, 轨迹半径变小, 提高了转向灵活性。主动转向比例系数K1和K2减小, 轨迹半径减小, 后部放大效应减小。F点的变化幅度比D点大。
以180° 圆周运动为例, 高速工况下, D点和F点主动同向转向, 转向比例系数K1和K2取负值。如图7 (a)所示, A点和B点的轨迹不变, A点的轨迹半径比B点大。如图7(b)所示, D点和F点向圆周内侧偏移, 轨迹半径变小, 提高了行驶稳定性。主动转向比例系数K1和K2的绝对值增大, 轨迹半径减小, 后部放大效应减小。F点的变化幅度比D点大。
'> | 图6 半挂车后轴主动异向转向时的各轴中点轨迹Fig.6 Each axle center trajectory with semitrailers' axles active steering in the opposite direction |
'> | 图7 半挂车后轴主动同向转向时的各轴中点轨迹Fig.7 Each axle center trajectory with semitrailers' axles active steering in the same direction |
建立了双半挂汽车列车的运动学模型, 采用了直角坐标系和极坐标系相结合的方法, 运用几何定理求解, 对90° 、180° 、270° 和360° 弯道行驶中各轴中点的运动轨迹进行了仿真。结果表明, 在双半挂汽车列车中, 半挂车后轴的轨迹具有跟随性和后部放大效应。半挂车的轴距变化影响其后轴轨迹的变化:轴距越长, 半挂车后轴轨迹向圆周外侧偏移, 轨迹半径增大, 后摆值和前摆值增大; 反之, 轨迹半径减小, 后摆值和前摆值减小。铰接点的位置变化影响半挂车后轴轨迹的变化:铰接点后移, 轨迹向圆周外侧偏移, 轨迹半径增大, 后摆值增大; 反之, 轨迹半径减小, 后摆值减小。半挂车后轴主动转向影响其后轴轨迹的变化:低速工况下半挂车后轴与牵引车前轴轮胎转角方向相反, 高速工况下半挂车后轴与牵引车前轴轮胎转角方向相同, 半挂车后轴轨迹向圆周内侧偏移, 轨迹半径减小, 后部放大效应减小, 提高了转向灵活性和行驶稳定性。文中在分析过程中简化了运动学模型而忽略了一些因素, 在后续的研究中将结合主动转向控制的车辆动力学模型对其轨迹进行仿真, 深入讨论和验证双半挂车列车的轨迹特性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|