
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
公交车钩形转弯交叉口自适应信号控制方法
[陈松1, 2  , 李显生
, 李显生1 , 任园园1 ]
, 李显生]
|
|


作者简介:陈松(1983-),男,博士研究生.研究方向:车辆行驶可靠性与安全技术 E-mail:chensongimy@163.com
公交车钩形转弯方法可以保证禁左交叉口的公交车正常左转,对于提高交叉口通行能力、保证公交系统运行效率具有重要意义。针对该类型交叉口待行区易发生公交车排队上溯以及交叉口清空时间的浪费问题,本文基于感应信号控制逻辑,提出了三种类型检测器布设方案,建立了排队上溯检测方法、全红时间自动确定方法以及自适应信号控制流程。以沈阳市实际交叉口为例采集交通数据,在VISSIM中进行仿真评价。结果表明:在高峰期,本文所建立方法可以将车均延误降低10.8%、最大排队长度降低9.8%;在平峰期可以将车均延误降低13.1%、最大排队长度降低17.2%。
Bus hook turn method can guarantee the left turn operation of buses at the left-turn prohibition intersection. It is meaningful to improve the intersection capacity and maintain the operation efficiency of the bus system. To solve the problem of the queue bus spillovers at waiting areas and the waste of all-red clearance time at such intersection, a layout scheme of three kinds of detectors is proposed based on the actuated control logic. The queue spillover automatic detection method, the automatic determination method for all-red time and the adaptive signal control flow are developed. An intersection at Shenyang City is taken as an example and filed data are collected. Simulations and evaluations are conducted in VISSIM software. Results show that in peak time the proposed method can reduce the average vehicle delay by 10.8% and reduce the maximum queue length by 9.8%. In off-peak hour, the average vehicle delay and maximum queue length can be reduced by 13.1% and 17.2% respectively.
交叉口车道渠化与相位相序设计是信号控制的基础。一般当左转交通流量较大时, 需要在交叉口设置左转专用进口车道以及左转专用相位, 这可以避免左转车与对向直行车的冲突, 维持交通流有序运行[1, 2, 3]。然而随着交叉口相位数的增加, 每周期的绿灯损失时间也将增加; 另外设置左转专用相位将导致交叉口通行能力的下降, 因为在左转相位显示绿灯期间, 只有左转相位控制的1-2条进口车道释放排队车辆, 相同进口方向的多条直行车道的机动车需要停车等待。因此, 在拥堵交叉口如何有效控制左转车、提高交叉口通行能力一直是交通工程领域的研究热点[4, 5]。而交叉口禁止左转是一种常见的控制方法, 它可以减少相位数, 显著提高通行能力, 进而减少排队长度、缓解交通拥堵。但是在这种情况下, 左转机动车需要绕行才能到达目的地[6, 7]。小汽车在较窄的道路上就能完成调头、绕行, 而公交车由于车身较长, 一般很难在附近区域找到调头、绕行地点; 另外, 公交车辆需要按照固定线路运行, 如果绕行过远, 将增大公交车行程时间, 降低乘客满意度。因此, 在禁止左转交叉口需要特殊考虑公交车的运行情况[8, 9, 10]。
沈阳市交管部门在禁止左转交叉口专门针对公交车辆提出了一种钩形转弯方法。即公交车驶入最外侧进口车道, 在直行相位绿灯启亮后, 越过停车线, 驶入交叉口内部等待; 当相交方向的绿灯启亮后再驶离交叉口。这种方法可以在不设置左转专用相位的情况下保证公交车的左转过程, 使得小汽车与公交车的运行效益最大化。然而目前在这种类型交叉口, 信号配时方案依靠工程经验确定, 缺乏理论依据, 难以适用交通流的随机波动。别一鸣等[11, 12]虽然研究了Hook turn这种钩形转弯方法, 但是均适用于普通社会车辆, 未考虑公交车的运行。因此, 本文考虑到禁止左转交叉口公交车钩形转弯情况, 提出了一种自适应交通信号控制方法, 以提高交叉口交通流运行效率。
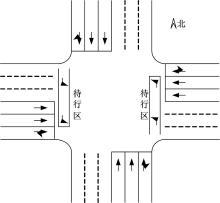
如图1所示, 交叉口每个进口方向均禁止机动车左转, 只允许直行和右转。所以交叉口只有两个信号相位(如图2所示), 其中相位一控制南北方向的机动车, 而相位二控制东西方向的机动车。假设南北进口的左转公交车采用钩形转弯方式, 以南进口为例, 左转公交车驶入最外侧车道排队等待; 当相位一的绿灯启亮后, 公交车越过停车线驶入待行区内等待; 在相位一的绿灯结束后, 交叉口显示一段全红时间, 此时待行区内的公交车完成左转。在全红时间结束后相位二的绿灯才能启亮。需要注意的是:当公交车在待行区内等待时, 为了不妨碍南北直行机动车的通行, 待行区需要进行一定距离的偏移, 这也将导致相交方向的车道停车线后移。
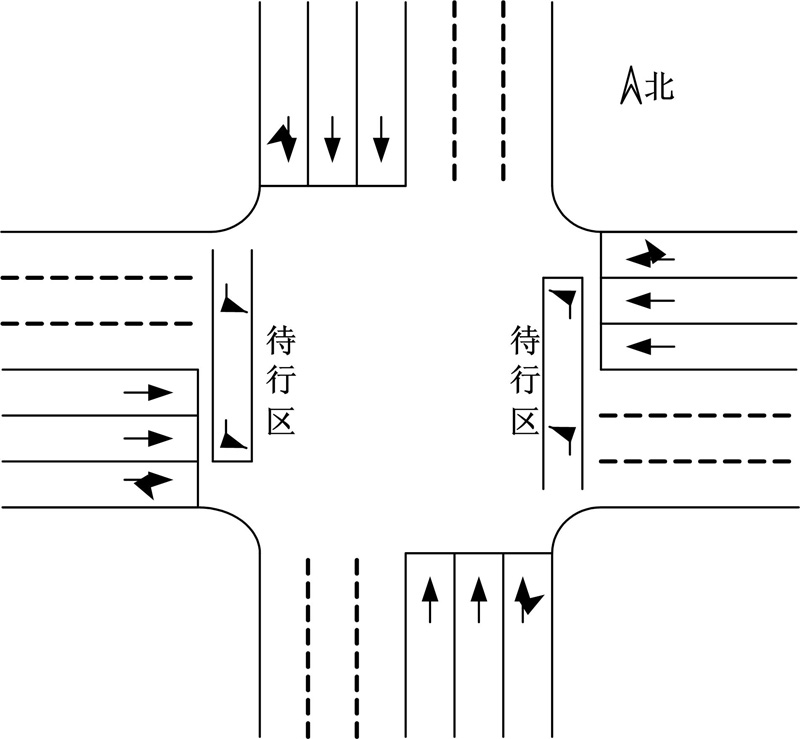 | 图1 公交车钩形转弯交叉口渠化方案Fig. 1 Channelization design scheme of intersection with bus hook turn |
 | 图2 公交车钩形转弯交叉口相位方案Fig. 2 Phasing scheme of intersection with bus hook turn |
由以上描述可以看出, 这种交叉口的设计方法与传统交叉口存在显著差异。首先, 左转公交车驶入最外侧车道, 而不是最里侧车道; 其次, 左转公交车需要在交叉口内部的待行区停车, 一般每个周期需要停车两次; 再次, 左转公交车利用信号清空时间驶离交叉口, 没有专用的信号相位。总体上, 这种设计方法在保证公交车可以左转的情况下, 压缩了交叉口相位数, 提高了交叉口通行能力。
1.1节对公交车钩形转弯交叉口的设计方法进行了简要介绍。一方面, 待行区的长度受相交道路宽度制约, 而公交车身比较长, 所以待行区内只能容纳有限的公交车(一般情况下最多2辆)。当一个周期到达的公交车辆数较多时, 待行区内的公交车排队将上溯至最外侧进口车道, 导致该车道的机动车在绿灯期间无法释放, 极大地降低通行能力。另一方面, 当相位一的黄灯时间结束后, 交叉口将显示一段全红时间。如果全红时间过短, 那么待行区内的公交车难以完全释放, 导致相位二的直行车与公交车在交叉口内部冲突。如果全红时间过长, 那么将使得其他相位机动车的延误增加。针对上述两类问题, 目前并未有学者进行研究、进而提出一种高效的信号控制方法。
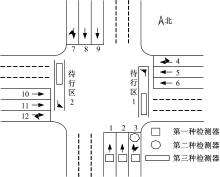
为了解决2.1节所提出的两方面问题, 本文对公交车钩形转弯交叉口实施自适应信号控制方法。而检测器布设是自适应信号控制的前提, 是保证交通流信息实时采集的关键。如图3所示, 交叉口一共布设三种类型的检测器。
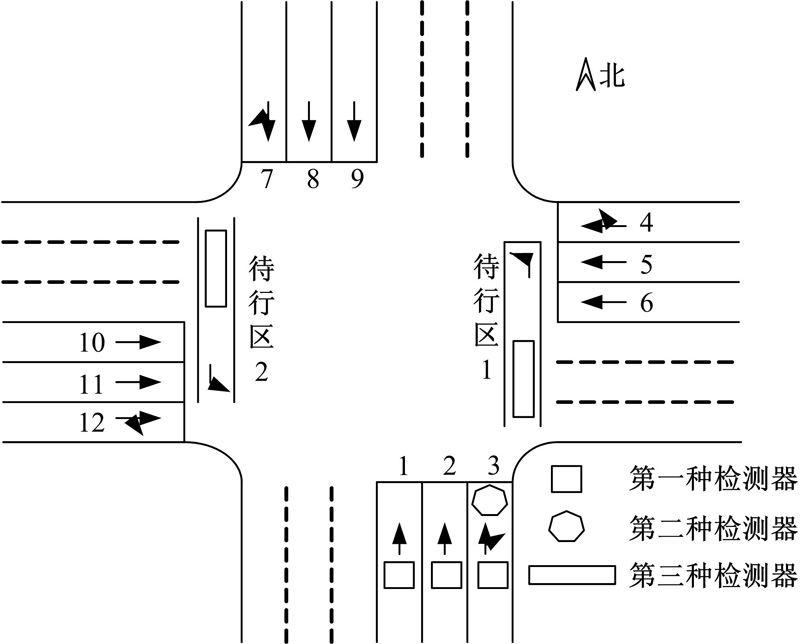 | 图3 交叉口检测器布设方案Fig. 3 Detector layout at intersection |
第一种检测器用来检测各条进口车道的交通流到达情况, 布设在停车线后x1 m的位置, 它是实现整个交叉口自适应控制的基础。为了准确检测到每条车道的机动车到达情况, 第一种检测器必须布设在渠化区内。检测器采用2 m× 2 m的规格, 布设在车道中间, 以避免漏检。L1建议取值40 m, 如果L1太大, 则信号机预测机动车从检测器至停车线的行程时间误差可能增大。
第二种检测器用来检测待行区内是否发生公交车排队上溯。如果公交车排队上溯, 那么在相位一绿灯期间该检测器将一直被占据。检测器采用2 m× 2 m的规格, 布设在车道中间。
第三种检测器用来检测待行区内是否有公交车排队, 以决定何时结束全红时间。如果公交车数量较多, 那么所需要的全红时间较长; 否则需要的全红时间较短。第三种检测器并未布设在待行区停车线处, 是因为有时待行区内的第二辆公交车直接从停车位置处转弯, 并未通过停车线。检测器为长方形, 建议尺寸8 m× 2 m, 布设在待行区中间位置。
1.3.1 待行区排队溢出自动检测算法
以图3为例, 南进口车道3布设了第二种类型检测器, 它被用来检测待行区1内是否发生了公交车排队溢出。当相位一的绿灯启亮后, 车道3的车辆依次越过停车线, 其中左转公交车驶入待行区1内排队等待。当待行区1被左转公交车占满时, 后续的左转公交车将无法驶入待行区1, 只能在车道3继续排队, 此时车道3将被阻塞, 车辆无法驶离。在这种情况下, 车道3的第二种检测器将一直被占据, 直至相位一的绿灯在下一个周期启亮。
基于此, 待行区1内发生排队溢出的判断标准是:在相位一显示绿灯期间, 车道3的第二种检测器连续x秒出现高电平, 即处于被车辆占据状态。其中:
x=x1+Δ t(1)
式中:x1为正常行驶状态下一辆公交车占据第二种检测器的时间, s; Δ t为容错时间, s。
Δ t的取值对于待行区内排队溢出事件的判别精度具有重要影响。如果Δ t取值较小, 那么当公交车通过停车线运行速度较低时, 可能被误判为发生了排队溢出; 如果Δ t取值较大, 将造成判别的迟滞, 信号机无法及时提供决策方案。
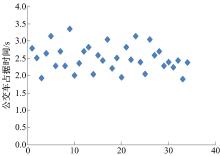
作者在沈阳市文艺路与青年大街交叉口进行了实地调研, 以获取准确的x1和Δ t取值。该交叉口的四个方向均禁止左转, 公交车需要实施钩形转弯。选择南进口最右侧车道停车线后2 m左右的位置, 采用黄色胶带黏贴成一个2 m× 2 m的方框, 用来表示感应线圈检测器。在车道旁边放置摄像机, 拍摄公交车经过方框的视频。连续摄制15个周期, 一共获得33辆公交车经过方框时的有效数据。每辆公交车占据方框的时间等于车尾驶离方框时刻与车头压上方框时刻之差。这33辆公交车占据方框的时间如图4所示。
在调查时之所以不选择小汽车是因为公交车的车身长度明显大于小汽车。如果调查较多辆小汽车的数据, 将会拉低整体占据时间的平均值。那么每当公交车经过感应线圈时, 信号机都可能误判为待行区发生了排队上溯。所以仅选择公交车进行调查统计。
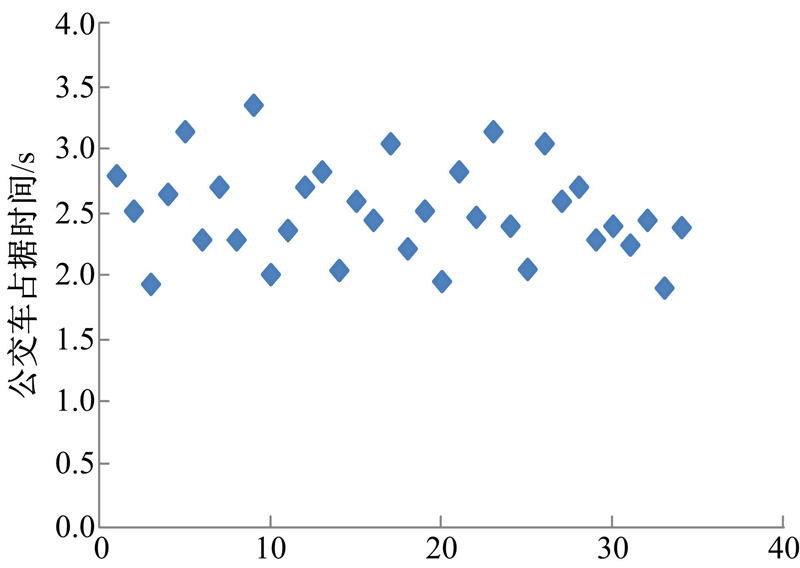 | 图4 调查交叉口每辆公交车占据检测器时间Fig.4 Bus occupy time of each bus at the investigated intersection |
图4中33辆公交车占据时间的平均值为2.51 s, 标准差为0.37 s。根据概率论中的“ 3σ 原则” , 如果将公式(1)中的x1设置为2.51 s, Δ t设置为1.11 s, 那么99.7%的公交车停靠在检测器上, 均可以被准确地识别出来。因此, 在本文中x等于3.62 s, 即如果在相位一显示绿灯期间一辆机动车占据第二种检测器的时间超过3.62 s, 可以认为待行区内发生了排队上溯。
1.3.2 全红时间的自动确定方法
以图2为例, 相位一的黄灯结束时刻与相位二的绿灯启亮时刻之间存在一段全红时间, 该时间主要用来清空待行区内的公交车。如果待行区内的公交车数量比较少, 那么全红时间需要设置的短一些; 反之则全红时间需要设置的长一些。在未布设检测器的交叉口, 全红时间只能设置为固定值。然而在待行区内布设第三种检测器的情况下, 可以通过检测器数据自动确定全红的结束时刻, 以提高交叉口控制效率。
根据在沈阳市文艺路与青年大街交叉口的实际观察, 当待行区内排两辆公交车时, 第一辆公交车越过待行区的停车线驶离交叉口; 而第二辆公交车直接在排队位置进行左转, 并未通过待行区的停车线。所以如果把第三种检测器布设在待行区停车线附近处, 将无法检测到第二、第三辆公交车。
因此, 本文提出如下全红时间的自动确定方法:当待行区内第三种检测器由被占据状态变为空闲状态时, 信号机立即结束全红时间, 并启亮相位二的绿灯。由于相位二的机动车驾驶员需要反应时间、启动时间以及行驶至待行区的时间, 在该时间内交叉口内部的公交车已经驶离, 这样可以避免了二者的冲突。
1.3.3 自适应信号控制流程
以图2、图3所示的交叉口相位方案、检测器布设方案为例介绍自适应信号控制流程。
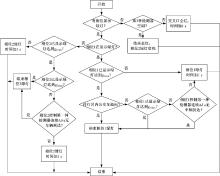
步骤1:交叉口是否有相位在显示绿灯?如果是进入步骤2; 否则进入步骤3。
步骤2:判断是否相位一在显示绿灯?如果是进入步骤6; 否则进入步骤12。
步骤3:此时交叉口显示全红, 正处于清空待行区内公交车的阶段。判断第三种检测器是否均处于空闲状态?如果是则进入步骤4; 否则进入步骤5。
步骤4:立即结束全红时间, 启亮相位二的绿灯; 转入步骤16。
步骤5:交叉口全红时间加1 s; 转入步骤16。
步骤6:判断本周期相位一已经显示的绿灯时间是否达到最小绿灯时间g1 min; 如果是, 则进入步骤7; 否则相位一绿灯时间加1 s, 转入步骤16。
步骤7:判断待行区内是否存在公交车排队溢出情况?如果存在, 进入步骤8; 否则进入步骤9。
步骤8:立即结束相位一的绿灯显示; 转入步骤16。
步骤9:判断本周期相位一已经显示的绿灯时间是否达到最大绿灯时间g1 max; 如果达到, 则转入步骤8; 否则转入步骤10。
步骤10:判断相位一控制的各条车道的第一种检测器是否均连续Δ δ 秒无车辆到达, 如果是, 则转入步骤8; 否则进入步骤11。
步骤11:相位一绿灯时间加1秒, 转入步骤16。
步骤12:此时相位二在显示绿灯。判断相位二本周期已经显示的绿灯时间是否达到最小绿灯时间g1min; 如果是, 则进入步骤13; 否则相位二绿灯时间加1 s, 转入步骤16。
步骤13:判断本周期相位二已经显示的绿灯时间是否达到最大绿灯时间g2 max; 如果达到, 则转入步骤14; 否则转入步骤15。
步骤14:相位二立即结束绿灯显示, 转入步骤16。
步骤15:判断相位二控制的各条车道的第一种检测器是否均连续Δ δ 秒无车辆到达, 如果是, 则转入步骤14; 否则相位二绿灯时间加1 s, 转入步骤16。
步骤16:本次判断结束, 转入步骤1。
信号机每1 s执行1次上述逻辑判断, 可以保证信号控制方案随着交叉口状态的变化而实时调整。在控制算法中, 各个相位的显示绿灯时间不能小于最小绿灯时间, 该时间根据行人过街时间确定, 即需要满足行人过街。最大绿灯时间需要考虑驾驶员的心理感受, 当一个相位的绿灯时间较长时, 其他相位的驾驶员红灯等待时间也将增加, 本文建议主干道方向取值80 s, 其他方向取值50 s。
自适应信号控制流程如图5所示。
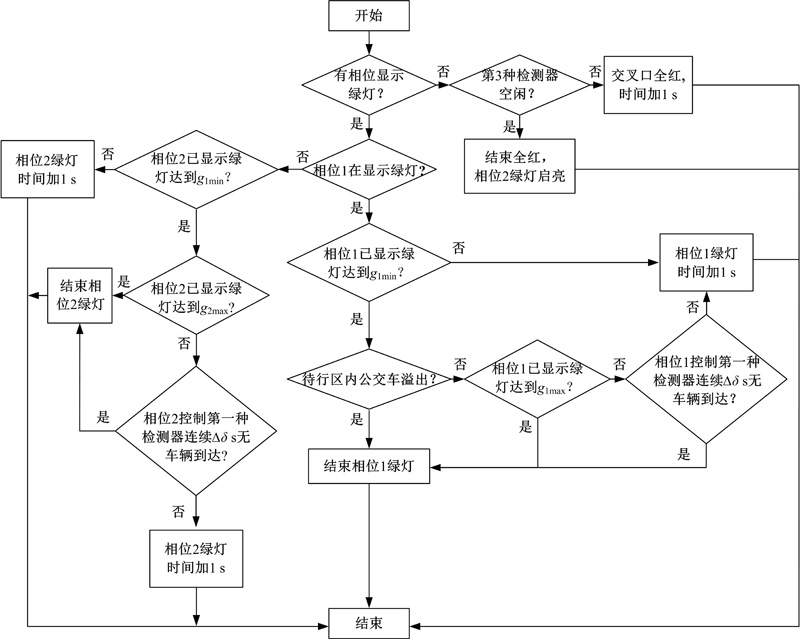 | 图5 自适应信号控制方法流程Fig. 5 Flow chart of adaptive signal control method |
采集沈阳市文艺路与青年大街交叉口的实际数据, 作为仿真环境的输入。青年大街是沈阳市的重要主干道之一, 交通流量较大。该交叉口四个方向均禁止左转, 所以四个方向的公交车均需要采用钩形转弯。受篇幅的限制, 本文不再给出该交叉口的渠化图。南进口和北进口均是四条车道, 包括3条直行车道, 1条直右车道。东进口和西进口均是3条直行车道, 1条右转车道。其中东西进口只有在夜间允许左转。该交叉口执行两相位信号控制方案, 南北方向交通流受相位一控制, 东西方向交通流受相位二控制, 每个相位的黄灯结束后交叉口均要执行全红。为了验证本文所建立方法的有效性, 于2017年2月21日早高峰(7:30~8:00)、上午平峰(10:00~11:00)进行数据调查。调查内容包括:每个进口车道的分车型流量、交叉口信号配时方案。调查流量如表1所示。
在VISSIM中进行仿真之前, 需要校正各条车道的饱和流率, 实际调查得到饱和流率为1800辆/h; 而VISSM中无法直接校正该参数, 不过可以通过调整驾驶员的行为参数进行校正。在高峰时段, 该交叉口的周期时长为162 s, 其中相位1的绿灯时间为105 s, 相位2的绿灯时间为47 s。
| 表1 文艺路与青年大街交叉口调查流量(单位:辆/h) Table 1 Survey volume data of Wenyi Road and Qingnian Street intersection (unit: veh/h) |
两个相位的黄灯时间均为3 s, 全红时间均为2 s。在平峰时段, 交叉口的周期时长为126 s, 其中相位1的绿灯时间为83 s, 相位2的绿灯时间为33 s。两个相位的黄灯时间、全红时间与高峰时段相同。
在交通仿真软件VISSIM中模拟两种方案:方案一是本文所建立的自适应信号控制方法, 通过VAP模块编程实现; 方案二是在该交叉口调研得到的信号配时方案。每种方案模拟高峰、平峰两种场景, 每种场景模拟4000 s, 其中前400 s为暖机时间, 采集从400 s至4000 s的仿真数据。采用交叉口车均延误、交叉口最大排队长度、最外侧车道发生排队上溯的次数作为评价指标。具体如表2、表3所示。
| 表2 两种方案对应的车均延误与最大排队长度 Table 2 Average vehicle delays and maximum queue lengths under two plans |
| 表3 交叉口各个进口发生排队上溯的次数 Table 3 Number of vehicle spill over on different intersection approaches |
从表2可以看出, 不管是在高峰期还是平峰期, 方案一均优于方案二。在高峰时段, 交叉口处于过饱和状态, 车均延误与排队长度的值均比较高。与方案二相比, 方案一的车均延误降低了10.8%, 最大排队长度降低了9.8%。在平峰时段, 交通流量整体减少, 交叉口不再出现过饱和现象; 与方案二相比, 方案一的车均延误降低了13.1%, 最大排队长度降低了17.2%。从表3可以看出, 与方案二相比, 方案一下待行区发生排队上溯的次数有一定程度的下降。比如在高峰期方案一下发生19次排队上溯, 方案二下发生21次排队上溯; 在平峰期方案一下发生7次排队上溯, 方案二下发生9次排队上溯。
之所以会出现方案一优于方案二的情况, 是因为方案一的自适应信号控制算法中引入了排队上溯自动检测方法以及全红时间自动确定方法。一旦检测到交叉口发生待行区排队上溯现象, 那么立即终止当前相位的绿灯显示, 并切换至下一个相位。而当待行区内公交车数量较少时, 全红时间显示比较短, 可以减少其他相位的机动车延误。此外, 本文所建立的算法可以通过检测器获取的交通流量信息动态调整信号配时参数, 适应交通流的随机波动。
(1)所建立的自适应信号控制方法可以比较准确地检测待行区排队上溯情况, 维持交叉口交通流正常秩序。
(2)全红时间自动确定方法可以根据公交车流量调整全红时间的长短, 这对于提高交叉口运行效率具有重要意义。
公交车钩形转弯这种方法虽然可以提高交叉口运行效率, 但是受相交道路宽度的限制, 待行区内只能停放少数公交车, 所以当左转公交车流量较大时本文所研究的方法将不适用。在工程中应考虑本方法的适用条件。例如待行区内可以停放2辆公交车, 交叉口周期时长为100 s, 每小时运行36个周期, 那么本方法适用于左转公交车流量不大于72辆/h的情况。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|