






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于零相差轨迹控制方法提升快速反射镜性能
[张士涛1, 2  , 张葆
, 张葆1 , 李贤涛1 , 王正玺1, 2 , 田大鹏1 ]
, 张葆, 李贤涛|
|


作者简介:张士涛(1991-),男,博士研究生.研究方向:航空光电稳定平台视轴稳定.E-mail:brethretao@163.com
为了满足航空光电侦察系统对反射镜速度快和精度高的要求,提出了一种在快速反射镜原有PID控制系统基础上加入零相差轨迹控制器的控制方法。零相差轨迹控制方法是一种专门针对位置轨迹控制的前馈控制方法,通过消除被控对象的零极点或者是相位差达到提升控制系统性能的目的。Matlab仿真试验结果表明,零相差控制方法使快速反射镜达到了理想性能。试验结果证明,相比于传统的PID控制,加入零相差控制器之后的快速反射镜性能有明显提升。
In order to meet the requirement of aerial photoelectric reconnaissance system that the performance of rapid and high precision need to be processed by Fast Steer Mirror (FSM), a control method of adding Zero Phase Error Tracking Control (ZPETC) to the original PID control system of FSM is proposed. As a feedforward control method, ZPETC is specially designed for tracking control. It is able to improve the performance of the control system by cancelling the zero pole or phase error of the controlled target. Matlab simulation results demonstrate that using ZPTEC FSM can achieve ideal performance. The experiment results prove that, comparing with the conventional PID controller, the performance of the FSM is improved.
快速反射镜(Fast steer mirror, FSM)一般由音圈电机或压电陶瓷作为致动器, 并配合一块反射镜组成[1], 具有惯性较小、易于安装和控制、响应速度快和定位精度高的优点。目前, FSM作为安装在目标与接受器之间, 用以控制光束方向的反射镜装置已广泛地应用在天文望远镜、激光通信、图像稳定、复合轴精密跟踪、瞄准等光学系统中。
在航空光电侦查系统中[2], FSM主要用来消除飞机飞行带来的像移和抑制高频扰动。其中抑制高频扰动需要FSM具有较快的响应速度、较高的响应带宽、较小的超调和相位滞后[3]。目前, 通过传统的PID控制可以在一定程度上达到提高带宽和减小超调的目的, 但是传统PID控制器作为一种经典的反馈控制器, 无法满足航空光电侦察系统对FSM的高带宽、高精度和快速性的要求。
Tomizuka[4]提出的零相差轨迹控制(Zero phase error tracking control, ZPETC)方法是一种针对运动轨迹控制的前馈控制方法。这种控制方法建立在对被控对象精确建模的基础上, 基于零极点控制理论, 通过在控制环路中加入前馈控制器达到消除零极点或者相位差并尽可能完美复现理想轨迹的目的[5, 6, 7]。在FSM的控制系统中引入ZPETC技术, 可以起到减小相位延迟, 降低控制系统响应时间和抑制超调进而提升控制系统性能的作用。
本文首先介绍了零相位误差轨迹控制的基本原理。然后给出了被控对象的精确建模过程和零相差控制的仿真试验。最后进行了仿真验证, 结果表明:相比于传统PID控制, 加入零相差控制器以后, 快速反射镜性能有明显提升。
ZPETC方法针对已有的闭环控制环路做了前馈矫正[8], 设被控的闭环控制环路为:
式中:
针对式(1)所示的闭环控制系统, 加入一个前馈控制器r(k):
式中:
设系统的输入为
从式(3)可以看出:通过加入前馈控制器
 | 图1 理想控制结构示意图Fig.1 Schematic of perfect control structure |
理想控制可以达到消除零点和极点, 实现完美输出的目的, 但是当被控对象
针对闭环传递函数分子
式中:
根据式(4)对
式中:
加入该前馈控制器之后, 输出与输入之间的关系为:
轨迹控制的误差在频率域可以分为幅度误差和相位误差。设输入一个正弦函数为:
式中:
经过式(5)所示的前馈控制器和闭环系统之后的输出响应为:
式中:
把传递函数(式(6))从
由式(8)(9)可以得出:
由于单位圆上和圆外的零点无法利用理想控制理论直接消除, 而这些零点会给系统带来
针对上述问题, Tomizuka[4]提出了零相差控制方法。在式(5)所示的前馈控制器中加入不可消除零点的共轭, 即:
此时, 系统总的传递函数变为:
将其变换到频域为:
式(12)表示的传递函数没有虚数项, 因此不会引入相位延迟, 解决了不可直接消除零点会带来相位滞后的问题。零相差轨迹控制的控制结构框图如图2所示。
 | 图2 零相差控制的结构示意图Fig.2 Schematic of ZPETC structure |
通过之前的理论分析可以看出, 零相差控制方法可以有效地抑制闭环控制系统的相位滞后, 提高系统的控制性能。但是这种方法的实现是建立在精确建模的基础之上的。如果建模不精确[9, 10, 11], 则零相差控制方法的效果将会大打折扣, 甚至出现反作用。为了尽可能地保证零相差控制器的性能, 本文采用白噪声扫频的方法对快速反射镜进行建模。
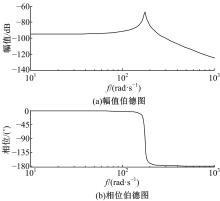
图3为快速反射镜通过白噪声扫频获得的幅频响应和相频响应。从图3可以看出:在幅频曲线中存在一个凸起, 这是由快速反射镜模型中二阶谐振环节引起的。从图3中可以看出:谐振频率约为178 rad/s, 峰值大小为-67.7 dB。相频曲线的第1个相位下降点与幅频曲线的谐振点几乎重合, 下降幅度为180 rad。另外相频曲线在高频段还有一个垂直下降阶段, 下降的幅度比较大, 这部分是扫频时出现的误差, 在建模的时候应该舍去。
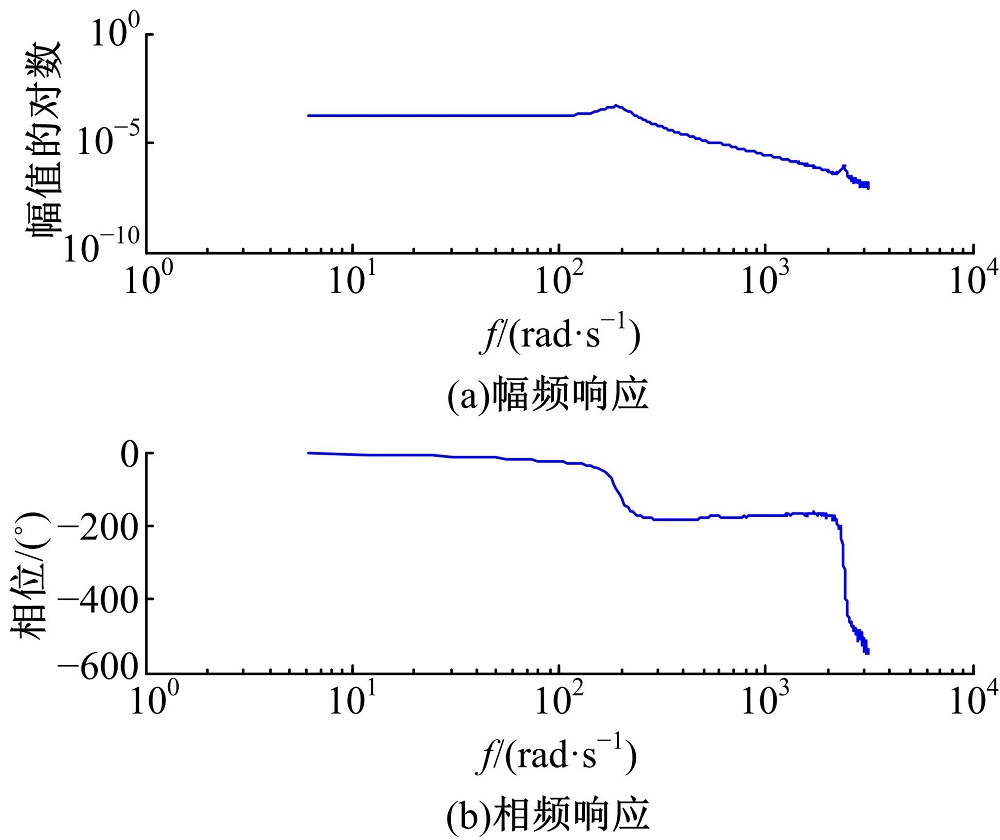 | 图3 白噪声扫频图Fig.3 Diagram of white noise sweep |
利用Matlab中的Matlab System Idengification Toolbox工具箱结合上面的扫频获得数据对快速反射镜进行拟合建模, 拟合出的快速反射镜模型形式为:
式中:
通过Matlab System Idengification Toolbox工具箱拟合出的模型还是一个比较粗糙的模型, 并不能很好地与扫频获得的响应曲线相符。此时, 在这个原始模型的基础上手动修改各个参数并让其伯德图尽可能地与扫频曲线重合, 达到精准建模的目的。通过这种方法确定出3个参数分别为:
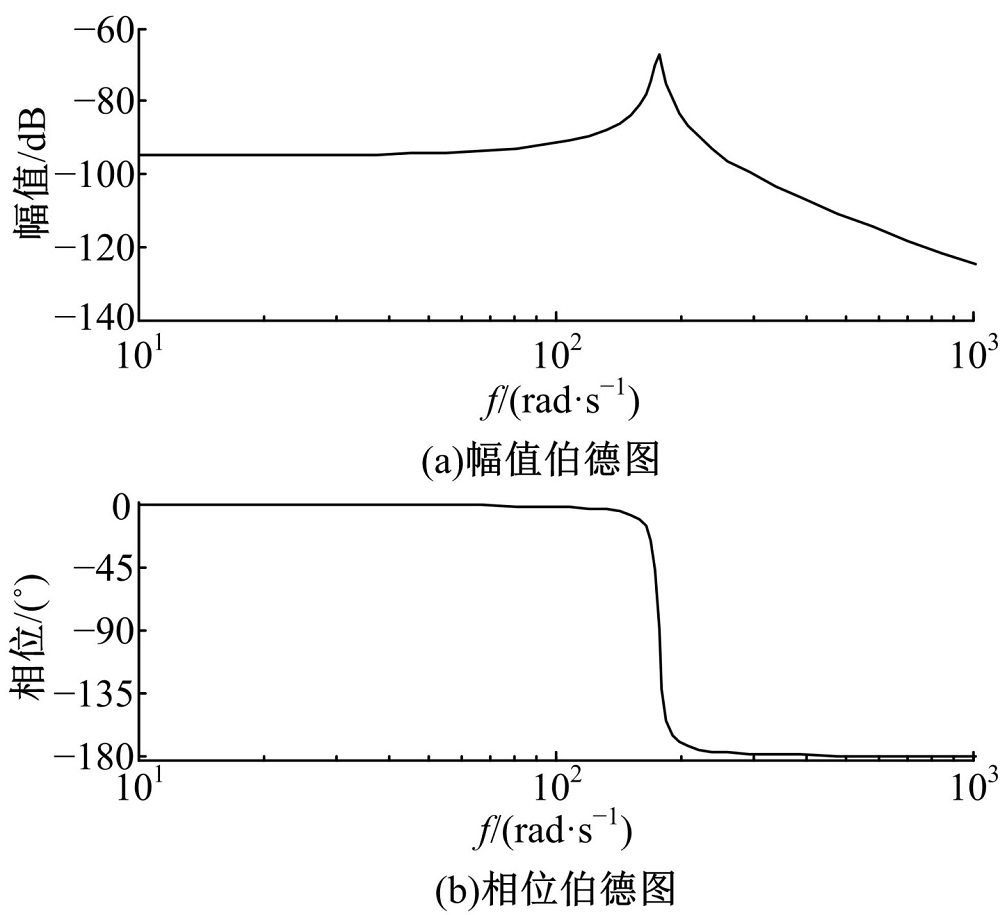 | 图4 快速反射镜模型伯德图Fig.4 Bode chart of FSM model |
通过对比白噪声扫频获得的频响曲线和拟合出模型的频响曲线可以看出:①两幅图的谐振频率基本相同, 分别为190和178 rad/s; ②两幅图的谐振峰值分别为-66.4和-67.7 dB, 基本相同; ③两幅图的相位拐点分别为147.3 rad/s和149 rad/s, 基本重合。总的来说, 本文模型基本上复现了快速反射镜的性能曲线, 可以作为后续控制器设计的模型依据。
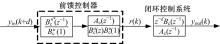
图5为加入零相差前馈控制器的快速反射镜控制结构框图。图中后半部分是依据白噪声扫频方法建立的模型, 以及根据模型设计的PID闭环控制器。前半部分则是根据闭环控制结构设计出的零相差前馈控制器。从图5中可以看出:零相差前馈控制器包含两个部分:①前馈控制器的被控对象中可以直接消除零极点的部分; ②不可以直接消除零极点需要消除相位差的部分。将前馈控制器的输出
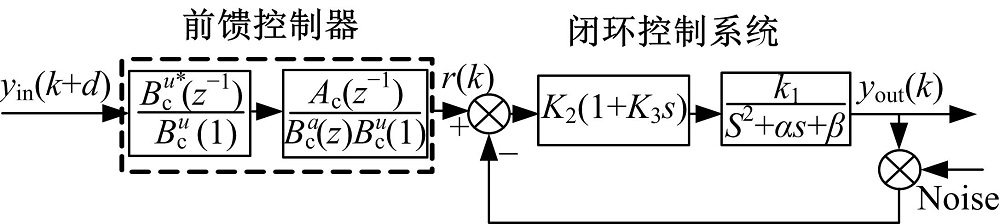 | 图5 快速反射镜控制结构框图Fig.5 FSM control block diagram |
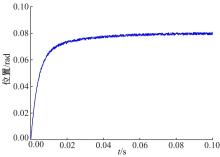
图6和图7分别为单纯PID控制下和PID结合ZPETC下快速反射镜的阶跃响应曲线。输入的阶跃信号的响应时间为0 s、终值为0.08 s, 扰动幅值为0.002。通过对比两幅图可以获得两种控制策略的性能差异如表1所示。
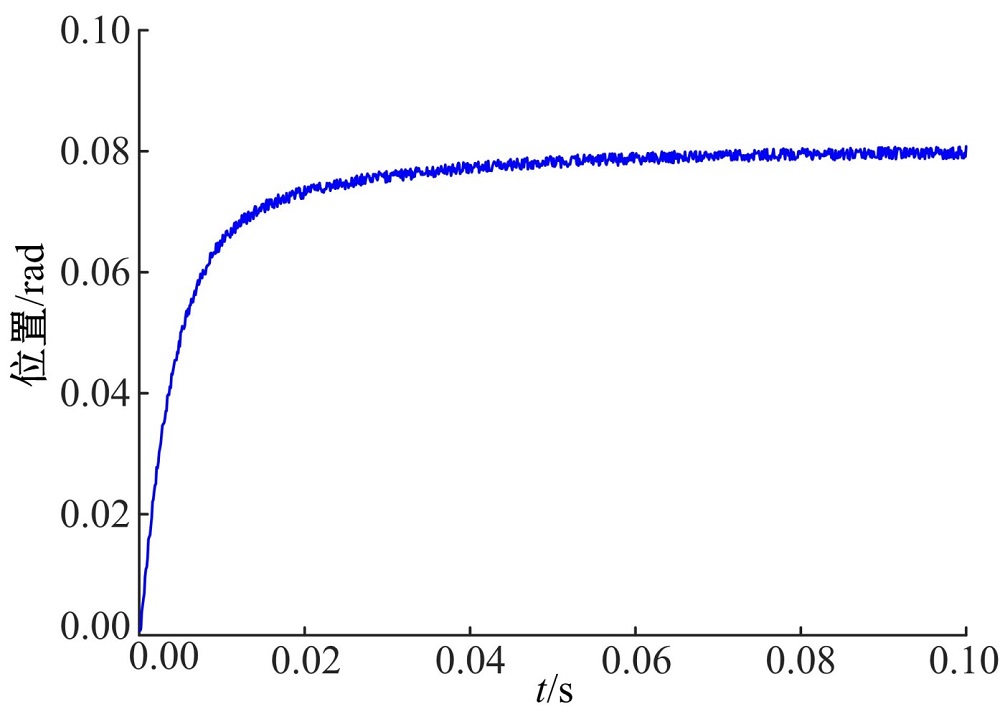 | 图6 单纯PID控制下快速反射镜的阶跃响应Fig.6 Step response of FSM under PI control |
| 表1 PID控制和零相差控制的阶跃响应性能比较 Table 1 Comparison of step response performance between PID control and ZPETC |
结合图6、图7和表1可以看出:加入零相差前馈控制器之后, 快速反射镜的性能获得很大提升。从阶跃响应上来看, 结合零相差控制方法的输出曲线在保持稳态误差不变的基础上, 响应时间变得更短, 响应速度获得大幅度提高, 提升了快速反射镜的控制精度和快速性。
 | 图7 PID和ZPETC下快速反射镜的阶跃响应Fig.7 Step response of FSM under ZPETC and PI contol |
对上述理论在实际快速反射镜中进行实际试验验证, 试验装置如图8所示。
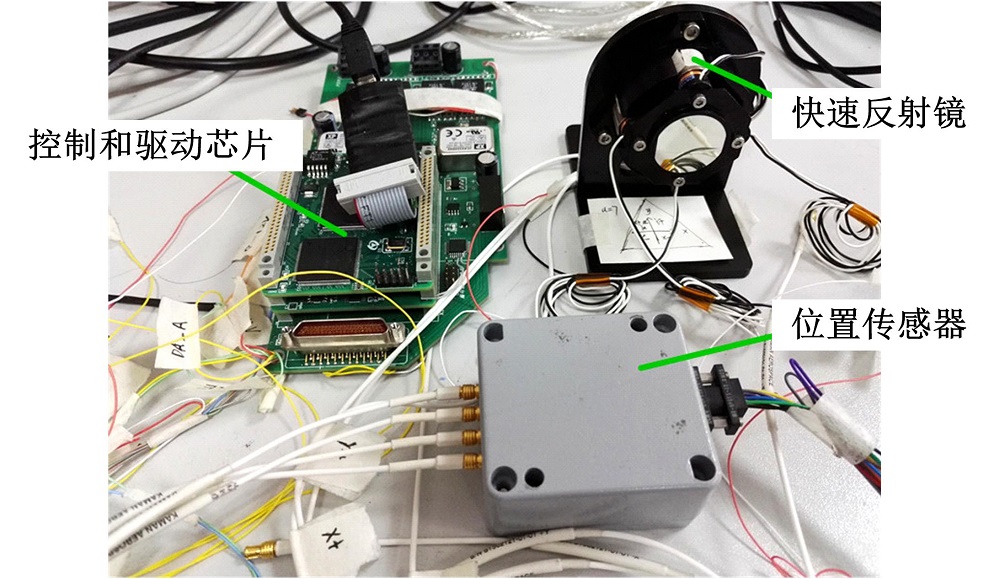 | 图8 快速反射镜试验平台Fig.8 Experimental platform of FSM |
图中, 快速反射镜的制动器为音圈电机可以做两个自由度运动; 位置传感器用来测量位置反馈信号; 控制和驱动芯片的核心控制芯片采用TMS320型DSP, 驱动方式为PWM驱动。
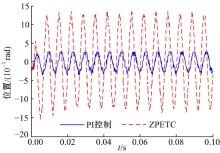
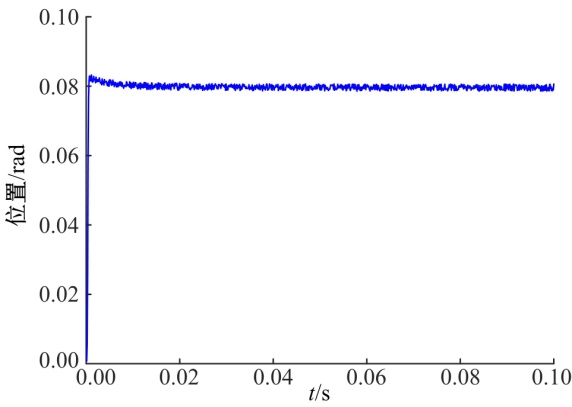
为了测试引入零相差控制器以后系统的响应速度, 进行阶跃响应试验。给定的阶跃信号终值为0.08 s, 分别采集获得单纯PI控制和ZPETC控制下响应曲线如图9所示。分析图9中的曲线可以得到两种控制方法的一些关键性能指标, 整理如表2所示。
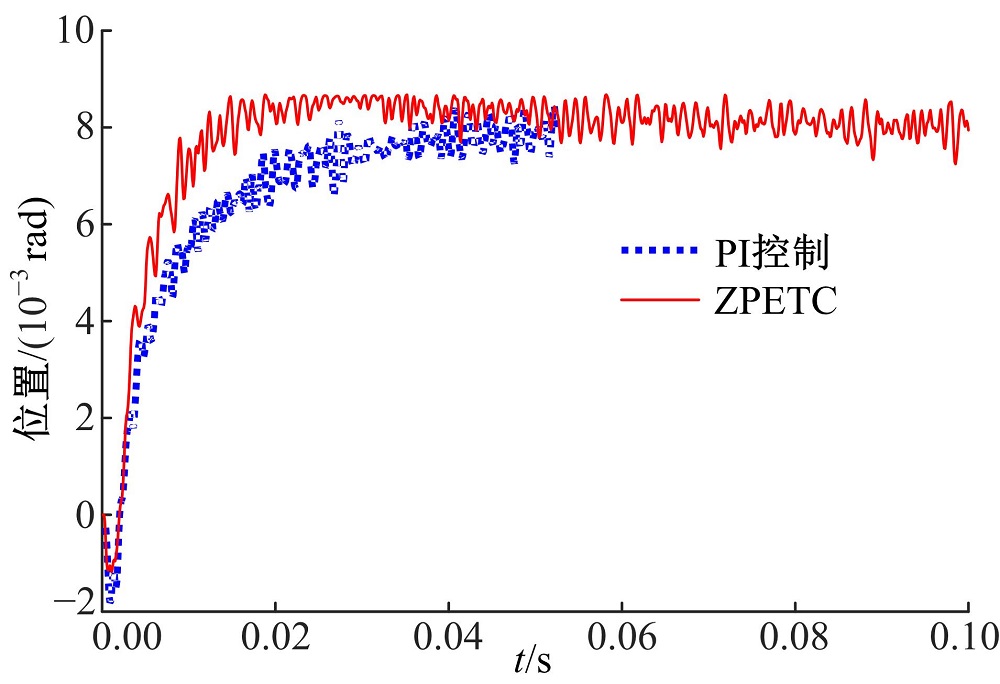 | 图9 PI和ZPETC下阶跃响应对比曲线Fig.9 Contrast step response curve of FSM under ZPETC and PI contol |
| 表2 PID控制和零相差控制的阶跃响应性能比较 Table 2 Comparison of step response performance between PID control and ZPETC |
观测图9和表2可以看出:引入ZPETC方法以后, 快速反射镜的阶跃响应时间由原来的50 ms降低到12 ms, 响应速度提高了4倍多, 证明零相差控制方法有助于提高快速反射镜的响应速度。但是通过对比表1和表2可以看出, 仿真结果与实际试验结果存在偏差。零相差控制器的响应时间相比于仿真结果有所增加, 另外零相差控制方法所带来的超调量消失, 两种控制方法的稳态误差也都有所增加。零相差控制方法比仿真结果的响应时间更长是由建模误差引起的, 在试验过程中, 通过不断改进模型可使实际的阶跃响应结果越来越接近理想的仿真结果。图10给出了模型精校前、后的阶跃响应对比曲线, 从图中可以清楚地看到前面所述的趋势。
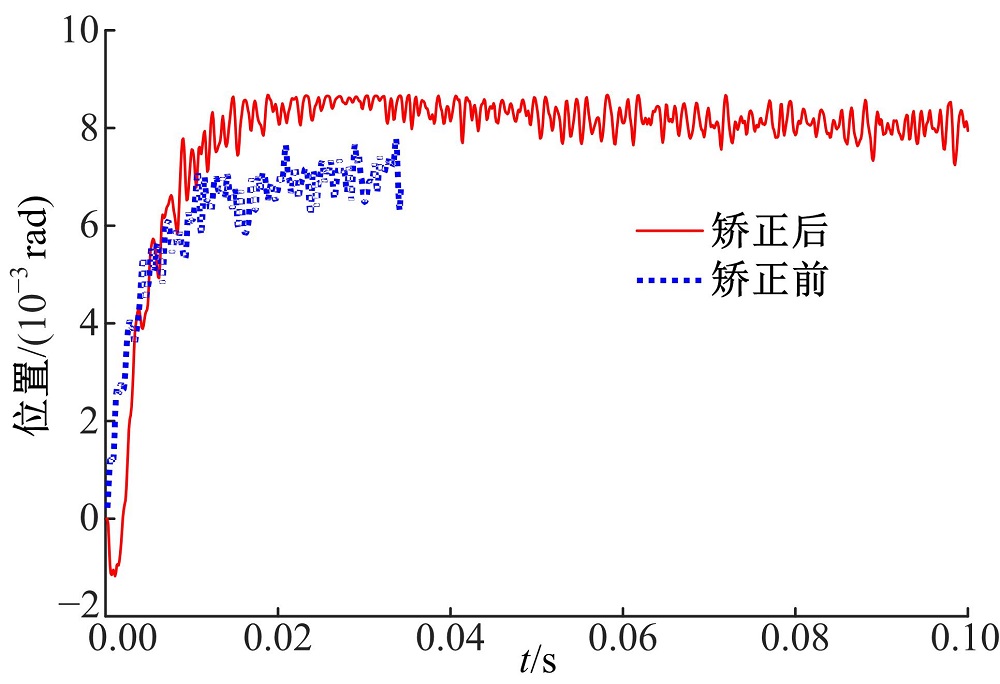 | 图10 被控模型矫正前、后阶跃响应对比曲线Fig.10 Contrast step response curve of FSM under original and corrected model |
为了测试两种控制方法的高频响应特性, 进行正弦响应试验。输入的正弦信号幅值为0.01, 频率为150 Hz。分别获得两种控制方法下输出曲线如图11所示。从图11中可以看出:单纯PI控制下的快速反射镜对于150 Hz的输入, 输出衰减特别厉害, 只能复现输入的25%左右, 衰减幅度达到75%。而加入零相差控制以后, 输出基本复现了输入, 只是由于建模误差的原因产生了微小的超调。从图11中还可以看出:单纯PI控制下, 快速反射镜的输出相位滞后比较大, 而引入零相差控制器以后相位滞后量有所减小。这一点在第1节零相差控制原理中已经提到, 零相差控制器的引入会消除被控对象中的相位差。
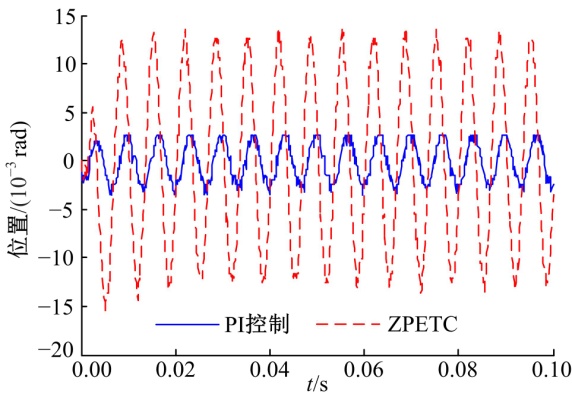 | 图11 PI和ZPETC下正弦响应对比曲线Fig.11 Contrast sinusodial response curve of FSM under ZPETC and PI control |
零相差控制方法作为一种前馈控制方法, 可以引入到现有的PID控制中, 以达到提升控制系统的性能的作用。通过一系列仿真试验证明了其理论上的可行性。针对快速反射镜对于快速性和高带宽的要求, 在现有PI控制器的基础之上引入ZPETC方法, 并通过试验验证在引入零相差控制器之后, 快速反射镜的响应速度提高了4倍多, 高频响应更加趋近于输入而且相位滞后明显减小, 达到了提升快速反射镜性能的目的。但同时零相差控制方法的实现有过分依赖于被控对象建模精度的弱点, 这也是导致本文中仿真结果与实际试验结果存在差异的主要原因。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|