
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
光电跟踪转台垂直轴系动态特性
[王涛1, 2  , 伞晓刚
, 伞晓刚1 , 高世杰1 , 王惠先3 , 王晶1 , 倪迎雪1, 2 ]
, 伞晓刚, 倪迎雪|
|


作者简介:王涛(1990-),男,博士研究生.研究方向:激光通信机械结构设计与力学分析.E-mail:cgswangtao@163.com
为实现光电跟踪转台的精密控制,对某型号跟踪转台垂直轴系动态特性进行了研究。首先分析了轴系固有频率与转台谐振频率之间关系,建立了垂直轴系动力学模型。然后建立了转台有限元模型,进行了模态分析,并根据实际工况,加载激励和边界条件,利用显式积分对垂直轴工作情况下整个转台响应进行求解。最后搭建了垂直轴系动态特性实验平台,进行伺服扫频实验,获得垂直轴以及随动部件的时域和频域特性。结果表明:动力学分析垂直轴系固有频率为180.4 Hz,仿真结果为190 Hz,伺服实验扫频结果为174 Hz,最大误差在10%以内,根据分析提出了增大垂直轴系固有频率与选取控制带宽的参考方案,为轴系动态特性探索研究与优化提供了依据。
In order to realize precise control of photoelectric turntable, the dynamic characteristics of the vertical shaft of a type of photoelectric turntable are investigated. First, the relationship between the natural frequency of the shaft and the turntable is analyzed, and the dynamic model of the vertical shaft is built. Then, the finite element model is established, modal analysis is carried out and the excitation and boundary conditions are loaded according to the actual working conditions. Using explicit integration, the response of the turntable is solved. Finally, the experimental platform for researching the dynamic characteristics of the vertical shaft is set up. Servo scanning experiment is carried out to obtain the characteristics of the shaft in time domain and frequency domain. Results show that the natural frequency obtained by kinetic analysis is 180.4 Hz, by simulation is 190 Hz and the experiment result is 174 Hz, the maximum error is less than 10%. According to the analysis, a reference scheme to increase the natural frequency of the vertical shaft system and to select the control bandwidth is proposed. This scheme provides the reference for research on the dynamic characteristics and optimization of the shaft system.
为使光电跟踪转台视轴能够准确跟踪目标, 伺服控制系统需要根据整体动态特性设计跟踪控制器, 因而系统的动力学建模仿真分析准确程度对实现精密控制显得尤为重要[1, 2, 3, 4]。为实现光电跟踪转台的精密控制, 学者们提出了一系列方法对轴系动态特性进行研究:葛兵[5]分析了视轴稳定系统结构, 建立了力矩电机、负载、陀螺仪等相关部分的数学模型, 提出了基于视轴稳定的控制方案; 张宁等[6]依据转台垂直轴与水平轴的俯仰角和方位角, 分析了动态靶标及跟踪误差的幅值谱和功率谱特性; 李锐等[7]为克服单轴伺服系统的固有频率和带宽限制, 设计了一个双轴复合捕获指向跟踪系统(Acquistion pointing and tracking, APT)系统, 并分析了动态滞后误差, 平台振动误差等特性对系统精度的影响。但是将轴系动态特性分析与转台控制带宽研究相结合, 揭示轴系固有频率与转台谐振特频率关系的研究较少。
从结构上考虑, 传统增加光电跟踪转台控制带宽主要是通过增大转台的固有频率, 同时, 为了保险起见往往选取较大结构尺寸, 导致转台整体非常笨重[8]。本文首先分析了轴系工作时固有频率与转台谐振频率之间关系, 利用临界转速法建立某型号光电跟踪转台垂直轴系动力学模型; 然后根据垂直轴工作状况建立了有限元模型, 模拟电机信号, 加载线性扫频转矩激励, 利用显式积分, 求解出垂直轴工作情况下整个转台的响应; 最后通过伺服扫频实验, 在照准架上添加三轴加速度数据采集系统, 获得实际工况下垂直轴的时域和频域特性, 实验结果验证了分析结果, 本文研究可为实现光电跟踪转台回转轴系精密控制提供参考。
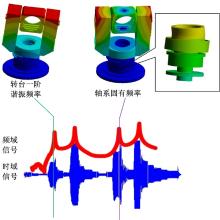
工程中常用霍尔兹法来估算光电跟踪转台的动态刚度, 并用其一阶谐振频率来确认控制带宽, 但是轴系回转共振频率常常高于转台一阶谐振频率, 转台谐振频率与轴系固有频率关系如图1所示, 在连接刚度较强时轴系固有频率可能与其高阶谐振频率相对应, 但在连接刚度较弱时, 轴系固有频率和转台谐振频率差距很大, 因而对垂直轴系单独进行分析很有必要。
 | 图1 转台固有频率与轴系固有频率关系示意图Fig.1 Schematic diagram of relationship between natural frequency of turntable and natural frequency of shaft |
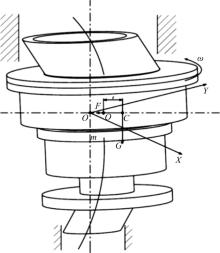
光电跟踪转台轴系在对应其某些谐振频率或次频、超频的转速附近转动时, 将出现很大的偏心回转, 导致很严重的垂直于轴向的振动, 造成机械损伤, 控制失稳, 因此, 在转台工作时需要避开这些临界转速[9]。
产生偏心回转时的工况如图2所示, 当垂直轴系以接近临界转速的角速度
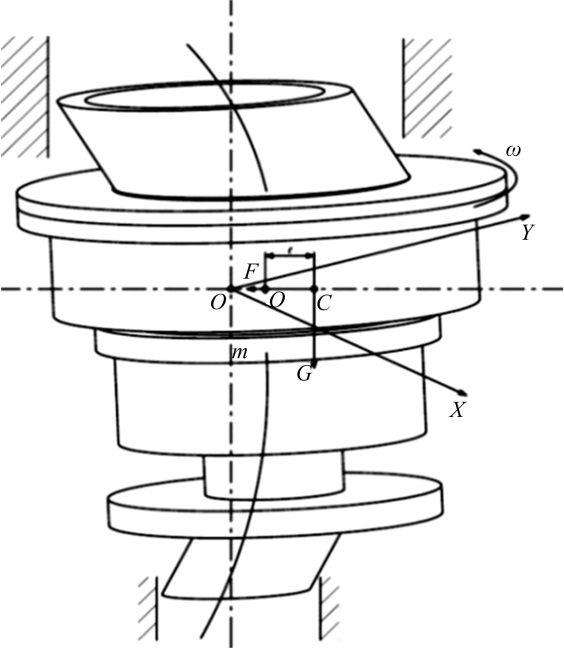 | 图2 垂直轴横向变形受力示意图Fig.2 Schematic diagram of vertical shaft transverse deformation |
式中:
本文分析的转台轴系材料为轴承钢, 弹性模量E=206 GPa, 由建模软件UG得到轴系及随动结构相对轴心的横向惯性矩I=3.669× 1
轴系关于
此微分方程的解为:
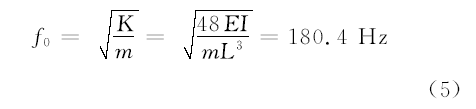
轴系固有频率为:
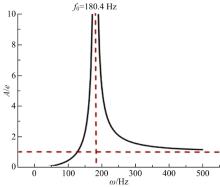
轴系运动幅值(动挠度)相对偏心量
动挠度随频率
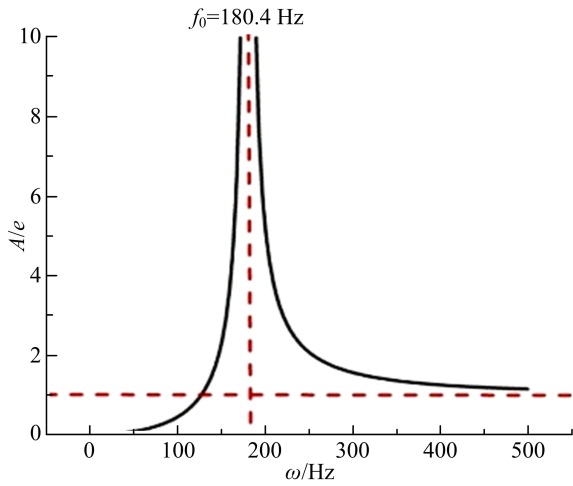 | 图3 动挠度随角速度变化曲线Fig.3 Variation curve of dynamic deflection with angular velocity |
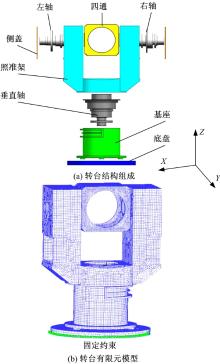
光电跟踪转台由左轴、右轴、照准架、四通、基座、垂直轴等结构组成, 如图4(a)所示。其中跟踪架、四通与基座等材料为铸铝, 弹性模量E=68.98 GPa, 泊松比μ =0.33, 密度ρ =2711 kg/m3, 垂直轴系和水平轴系转子-轴承系统材料为轴承钢, 弹性模量E=206 GPa, 泊松比μ =0.3, 密度ρ =7850 kg/m3。
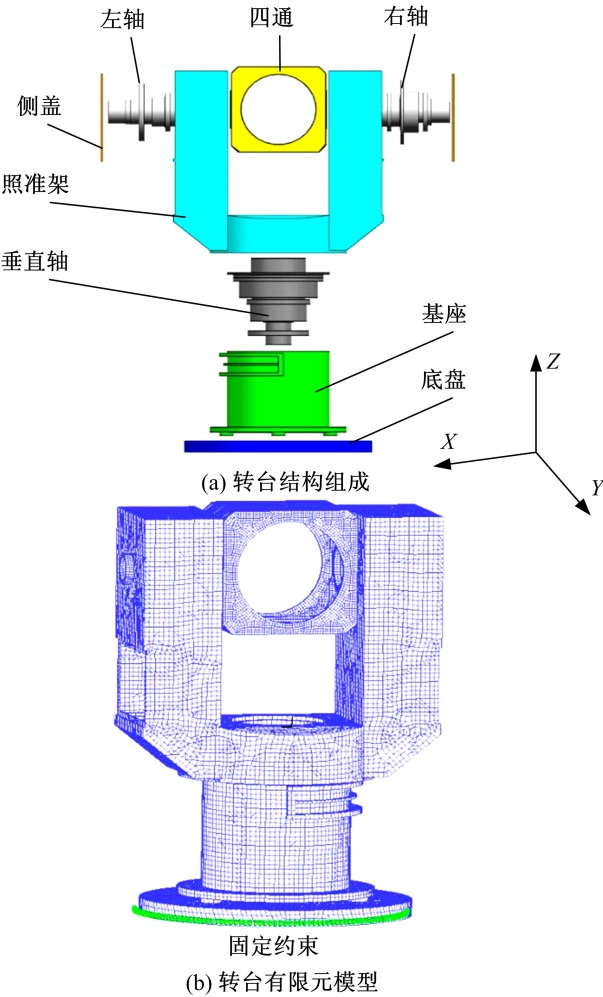 | 图4 转台结构组成和转台有限元模型Fig.4 Structure composition of turntable and finite element model of turntable |
建立整个光电跟踪转台有限元模型如图4(b)所示, 采用八节点六面体网格进行划分, 总单元数为26万, 总节点数为57万。
考虑结构间螺栓连接环节, 利用接触对模拟螺栓连接, 设定库伦摩擦因数和螺栓预载荷, 施加底端固定边界条件。
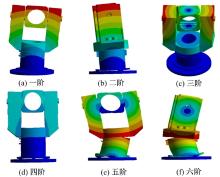
转台整体模态分析前6阶结果如下:1~6阶频率分别为41.9、50.3、170.6、209.2、221.0、269.7 Hz, 振型如图5所示。
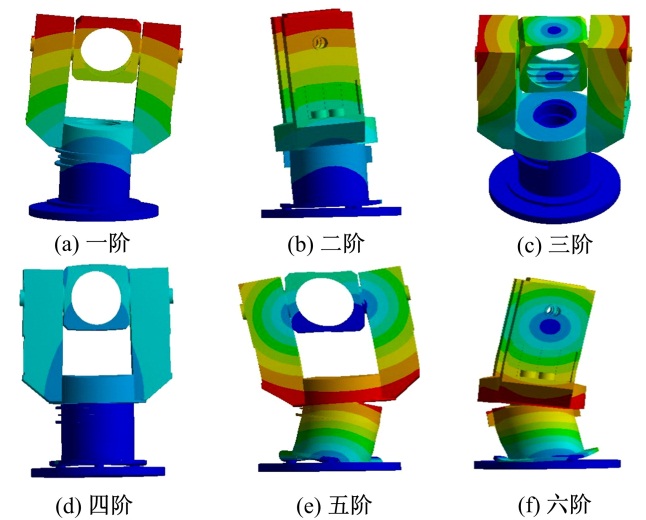 | 图5 前六阶模态振型图Fig.5 Mode shapes of first six-order |
将垂直轴电机激励转化为施加于照准架上的转矩, 由于垂直轴固有频率为180.4 Hz, 且整体结构前几阶谐振频率均低于300 Hz, 这里施加0~300 Hz线性扫频激励, 激励形式为:
式中:
 | 图6 扫频信号频率随时间变化曲线Fig.6 Frequency variation curve of sweep signal |
求解时, 因为结构接触状况较为复杂, 相较于隐式积分, 显式积分进行分析能够促进问题快速收敛, 适用于受冲击载荷内部发生复杂相互接触的结构动态响应问题[10, 11], 显式积分原理为:对于瞬态时域响应问题, 设第
速度和加速度差分公式为:
考虑平衡方程, 在第
满足边界条件和其他约束时, 更新节点速度和位移方程为:
应力矩阵可以通过求解
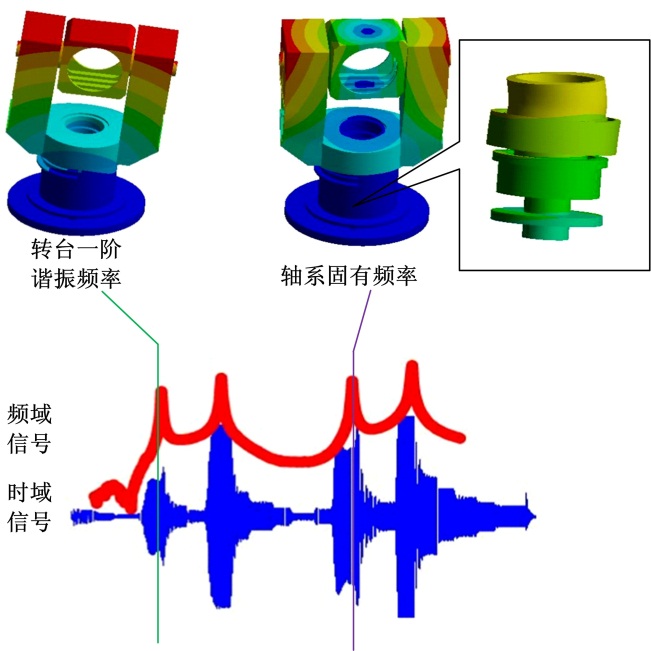
求解出垂直轴上节点时间-加速度曲线如图7所示, 共振发生在3.8 s左右, 对时间-加速度信号做快速傅里叶变换得到频域响应如图8所示, 在电机激励下, 共振频率为190 Hz, 并伴有频率约为
 | 图7 响应信号时间-加速度曲线Fig.7 Time-acceleration curve of response signal |
 | 图8 响应信号频谱图Fig.8 Spectrum of response signal |
根据光电跟踪转台垂直轴工作时实际工况, 固定底部, 利用控制器给电机发送扫频信号, 并利用编码器采集电机转速进行反馈, 这里编码器可以实时采集转速信息。为了更充分了解振动过程中随动部件的时域响应情况, 加贴8个传感器于照准架上, 传感器位置如图9所示, 时域信号具有直观、便于理解等特点, 而且往往是最原始的信号, 所以包含的信息比较丰富, 尤其是诊断故障振动信号时非常有用[12, 13]。实验加速度数据采集系统采用扬州苏式YMC-9800数据采集系统, 传感器均为PCB三轴加速度传感器, 各个轴单向灵敏度均在50 mV/g左右, 采样频率为2 kHz, 分析谱线数为1600, 对应频率分辨率为0.48 Hz, 扫频时间为200 s, 电机激励为每秒递增1 Hz的线性扫频信号, 垂直轴转速信息利用伺服控制系统编码器采集得到。
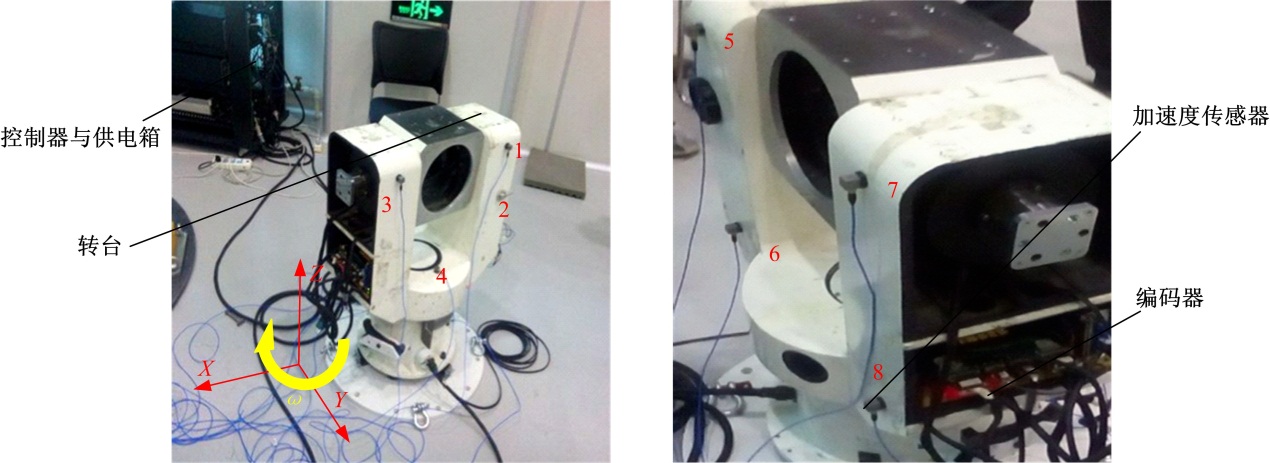 | 图9 转台扫频实验示意图Fig.9 Schematic diagram of frequency sweep experiment of turntable |
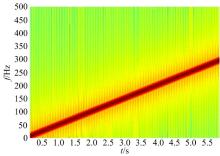
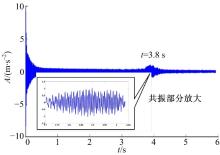
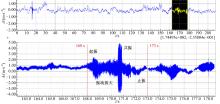
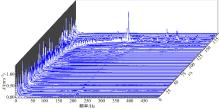
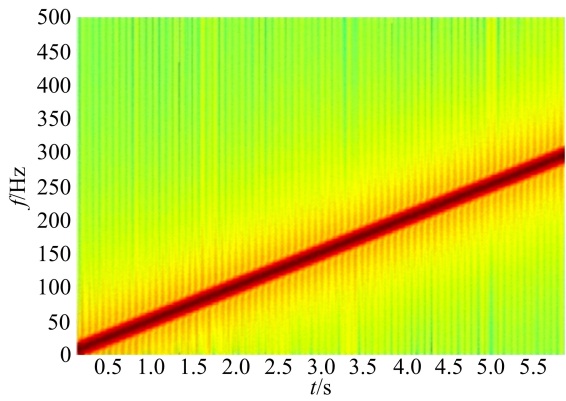
传感器采集到的信号如图10所示, 将离散信号进行快速傅里叶变换后整段振动频域瀑布图如图11所示。从时间-加速度曲线来看, 环境噪声和传感器零漂带来的加速度幅值误差较大, 低频的环境噪声影响较大, 导致加速度幅值误差较大。从瀑布图也可以看出:低频噪声存在于整段扫频信号中, 但是共振阶段信号仍非常明显, 将共振阶段时间-加速度曲线放大显示, 可以看出起振点在168 s左右, 共振最强烈位置在170.8 s左右, 可以看到加速度的幅值被急剧放大, 此时对应频率约为170 Hz, 与轴系固有频率180.4 Hz偏差不大, 到173 s共振渐渐停止, 信号恢复正常。
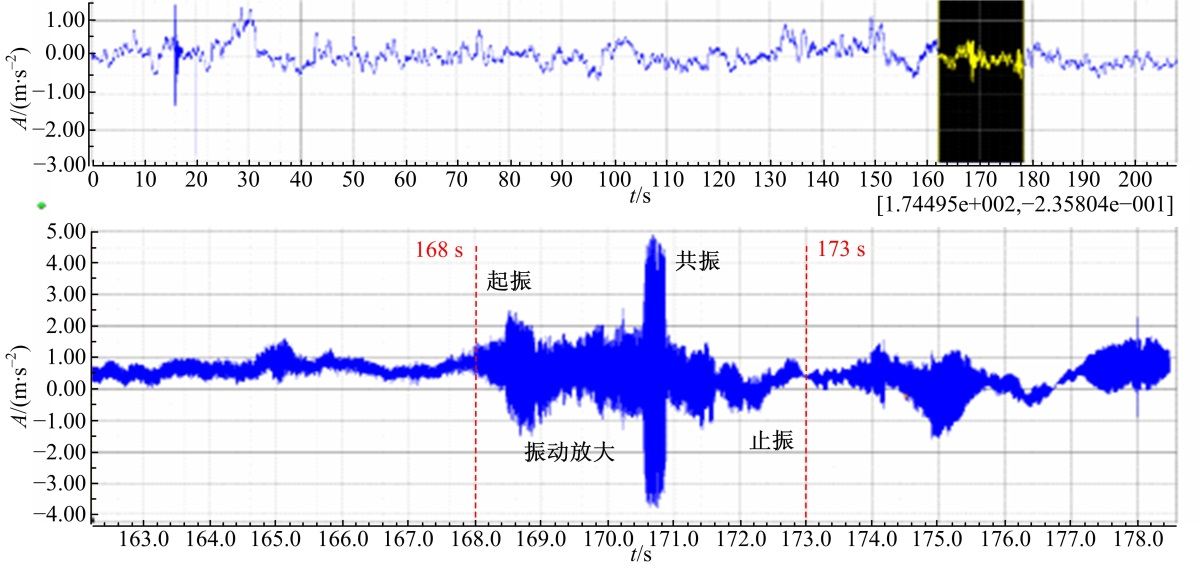 | 图10 传感器采集信号以及共振部分放大Fig.10 Signal acquisited by sensors and amplification of resonant part |
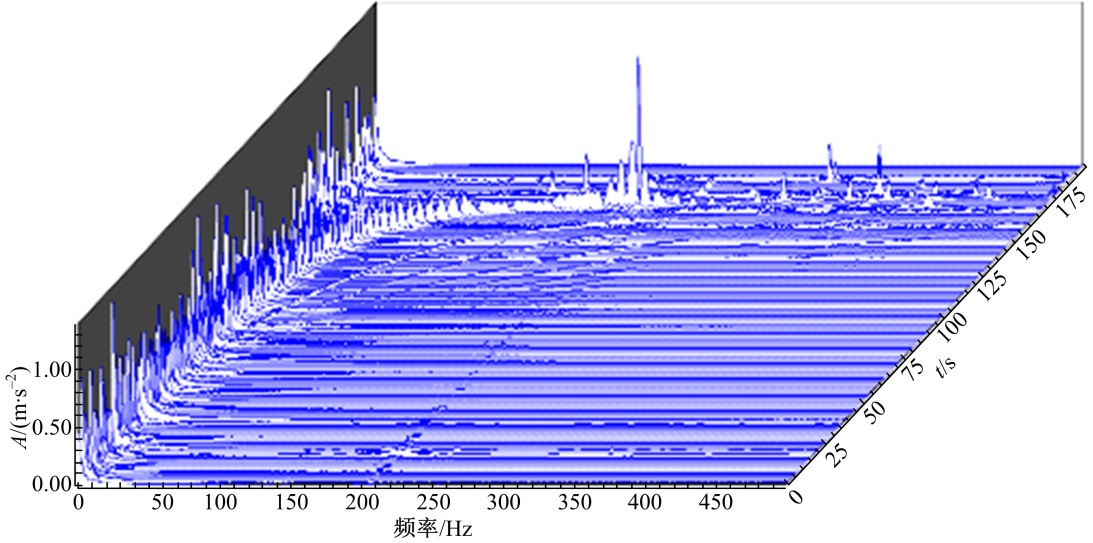 | 图11 扫频信号瀑布图Fig.11 Waterfall plot of sweep signal |
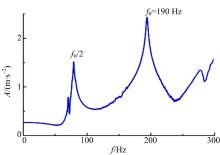
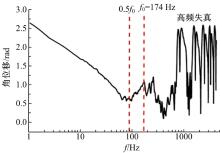
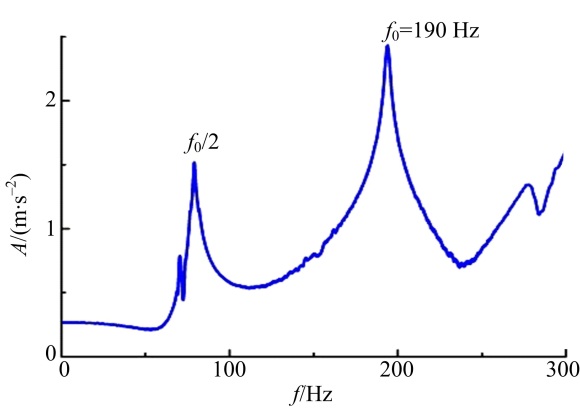
编码器采集到的信号如图12所示, 将角频率除以2π 化为频率值作为横坐标, 可以看到刚刚启动扫频时角位移幅值较大, 经纬仪振荡较大, 随着频率升高, 加速度幅值变化逐渐减小, 直到接近垂直轴系固有频率时, 加速度幅值再度升高, 发生共振, 识别出来的共振频率为174 Hz。并且从平稳运转到共振之间有段加速度逐渐升高的过程, 要实现平稳精密控制需要避开这一过程, 所以实际工程应用中, 一般控制带宽选择0.3f0~0.5f0。
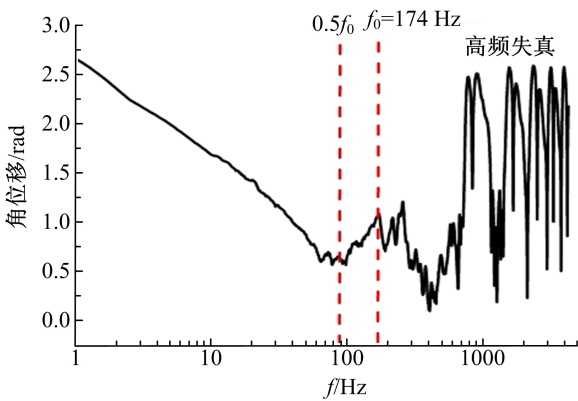 | 图12 垂直轴回转速度频谱图Fig.12 Vertical shaft rotation speed spectrum |
对某型号光电跟踪转台垂直轴系理论分析固有频率为180.4 Hz, 有限元分析结果为190 Hz, 实验结果为174 Hz, 误差在10%以内, 理论分析、仿真与实验可以很好地对应, 仿真与实验可以很好地反映出垂直轴系的动态特性。
由式(5)可知, 垂直轴系固有频率平方与轴系材料
垂直轴系存在临界转速, 在数值上与轴系固有频率相对应, 接近临界转速运转时, 轴系动挠度会被极大地放大, 因此在控制轴系运转时, 控制信号应当避开固有频率, 从扫频结果来看, 一般需小于0.3~0.5f0。
工程应用中常将光电跟踪转台一阶谐振频率作为其固有频率来确定控制带宽, 本例中转台一阶谐振频率为41.9 Hz, 而垂直轴系固有频率为174 Hz, 若利用一阶谐振频率来指导控制会大大减小控制带宽, 影响控制精度, 因此在工程应用中, 应当针对轴系实际的工作情况作具体分析。
建立了某型号光电跟踪转台垂直轴系动力学模型, 获得了垂直轴系固有频率的理论值, 讨论了临界转速对轴系回转的影响; 并根据垂直轴工作状况建立有限元模型, 加载线性扫频正弦转矩激励, 考虑接触边界条件, 利用时域显式积分, 求解出垂直轴工作情况下整个转台的响应; 最后通过伺服扫频实验并在照准架上添加三轴加速度数据采集系统, 获得实际工况下垂直轴的时域和频域特性, 结果表明:理论分析垂直轴系固有频率为180.4 Hz, 仿真结果为190 Hz, 伺服实验扫频结果为174 Hz, 最大误差在10%以内, 根据比较分析, 提出了增大垂直轴系固有频率与选取控制带宽的参考方案, 为实现光电跟踪转台回转轴系精密控制提供了参考。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|