

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于体外传感检测的人体站起动力学分析
[刘坤 , 刘勇, 闫建超, 吉硕, 孙震源, 徐洪伟]
, 刘勇, 闫建超, 吉硕, 孙震源, 徐洪伟]
, 刘勇, 闫建超, 吉硕, 孙震源, 徐洪伟]
|
|


作者简介:刘坤(1981-),男,副教授,博士.研究方向:下肢智能康复训练设备.E-mail:kunliu@jlu.edu.cn
基于人体站起运动三肢段动力学模型,采用自制力传感平台与定制的加速度和角速度传感器,开发了一套非侵入式人体运动传感检测系统,并与实验室光学运动采集系统进行了比对验证;基于所检测的信号计算了下肢各关节力矩,分析了人体站起动力学参数特征。本传感分析系统通过穿戴式体外检测,无需解剖学植入传感器,相较于实验室人体动力学检测和分析方法,传感器数量和种类都有所减少,降低了成本。通过比较分析所开发系统与作为参照的实验室光学检测系统的实验数据,验证了本文检测系统的精度和有效性,可用于人体站起康复运动训练检测和评估系统,进而可用于外骨骼康复训练机器人的控制。
A non-invasive estimation and analysis system for lower limb joint moments was developed based on a piecewise three segment Sit-to-Stand (STS) biomechanical model and a double-sensor difference based algorithm. The wearable sensor system, composed of force sensors, customized accelerometer and gyroscope, worked with vitro implanted sensors. Compared with conventional approach, the number and variety of sensors were reduced in this sensor system. Compared with the results from reference camera system, the developed wearable inertial sensor system is available to analyze the lower limb biomechanics of patient during the rehabilitation training with high degree of accuracy. In the future, the system could be applied for the detection and estimation system of human STS rehabilitation training and to the control of exoskeleton rehabilitation robot.
由坐到站是运动康复中首要解决的人体活动之一, 需要相对较大的关节力矩和精确的平衡控制能力, 同时也是一项复杂的动态任务, 需要调节下肢肌肉, 从而使人体从椅子上由稳定的坐姿上升到最终的直立姿态[1]。然而对于存在下肢运动功能障碍的患者而言, 因下肢肌群控制力不健全导致无法提供足够的关节力矩, 会使站起运动变得艰难[2]。
利用可穿戴式传感器系统来检测和分析人体站起运动是一种有效的临床手段, 但是现有的方法大都是通过摄像系统来对人体运动进行分析, 这种系统结构庞大复杂且昂贵, 因此不适于日常条件下普通人下肢姿态的检测与分析。随着小型化的惯性传感单元的应用, 这种情况有所改变, 不过现有研究大都是利用惯性传感器来评估人体在空间中的运动姿态, 而对于应用可穿戴式的惯性传感器来估算下肢关节力矩的研究则很少。为了充分锻炼并利用病人现存的肌肉、肌群力量, 外骨骼辅助和减重辅助康复机器人是弥补关节力矩和提供外部援助的关键技术[3, 4]。站起辅助系统的关键技术问题之一在于如何测量并估计关节力矩的大小[5], 这就需要通过可穿戴式实时检测与分析系统进行关节力矩分析。文献[6, 7]中研究了一种仅适用惯性测量装置在下肢康复中评估三维下肢关节运动学方法, 但只检测了髋关节和膝关节的角度, 没有对站起过程做动力学分析。文献[8]中设计了一种安装在大鼠踝关节处的非侵入式方法检测关节力矩的传感器, 但仅适用于动物实验而不符合人体关节动力学和解剖学特点。文献[9]中分析了轻度帕金森病患者在站起过程中姿势控制的联合力矩问题。文献[10]中对人体站起运动进行了运动学和动力学分析, 计算得到了关节力矩并且分析了关节力矩和站起运动时间的关系, 但是实验中采用了包含7个照相机的运动捕捉系统, 结构复杂、价格昂贵。以上所有的运动学和动力学数据都是由非穿戴式的摄像系统和测压力板获得的, 只适用于离线处理和分析, 不适用于实时检测和康复机器人控制系统的反馈应用。
本文建立了分段式人体站起动力学模型, 设计了体外非侵入式的可穿戴压力、加速度和角速度传感系统及方法, 检测分析了人体站起动力学特性。通过与实验室摄像机系统以及测压力板实验数据比较分析, 验证所研制的穿戴式传感器系统的准确性和有效性, 并利用所搭建的可穿戴传感系统, 结合所开发的力平台以及关节力矩的计算方法对关节力矩进行非侵入式的实时检测估计和分析, 为制定和评估站起康复训练运动计划以及研发康复训练机器人力矩控制提供实时的力矩检测方案。
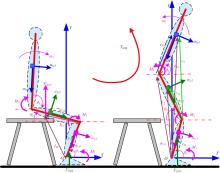
为了对基于可穿戴惯性传感系统的人体站起过程进行运动学和动力学分析, 以人体离开座位时刻为分界点, 建立人体矢状面内三肢段人体站起运动分段式动力学模型, 如图1所示, 在基于本课题组双传感器差分算法解算肢段运动学方法[3], 计算人体站起过程中矢状面内下肢肢段的旋转角度与角加速度。在人体离开座椅前, 以髋关节为运动中心, 分析上身(头、颈、手臂和躯干)运动学与动力学, 给出上身质心位置的角加速度计算公式如下:
 | 图1 人体站起运动分段式动力学模型和离座时刻前后的动力学分析Fig.1 Piecewise segment STS biomechanical model and dynamics analysis before and after seat-off |
因此, 在人体离开座椅前, 基于图1对人体进行动力学分析, 并且结合惯感和力感检测数据得出下肢各关节力矩计算式为:
在人体离开座椅后, 人体三肢段分别以相应关节点为转动中心, 做展体动作直至稳定静立姿态。在这个过程中, 小腿、大腿和上身躯干的角加速度计算公式如下:
在人体离开座椅之后, 基于图1中所建模型, 对人体站起运动进行动力学分析, 采用惯性传感信号(加速度和角速度)和力传感信号(足底和座位上的压力值)得出下肢各关节力矩计算式如下:
式中:l1、l2、l3分别表示小腿、大腿以及上身的长度;
基于前述方法实现人体站起动力学分析, 本文构建了基于压力传感器与可穿戴式加速度传感器和陀螺仪的体外传感检测系统, 并对比实验室光学运动分析系统(NAC Hi-Dcam II高速数码摄像系统)分析得出受验者下肢运动参数, 作为本传感检测方法的标准参考值, 对所构建的体外传感检测系统进行精确性的分析验证。
采用测力传感器(YZC-1B)组装成测压力板, 并使用单片机(Arduino Uno)以100 Hz频率采样。其中一个测压力板固定在椅面的前部(压力板A), 检测实验者臀部离开座椅前的支持力。另一个压力板固定在实验者脚下的地面上(压力板B), 检测整个站起过程中足部受到的支持力。通过所搭建的传感测量系统测量的加速度和关节角速度, 来解算角加速度和关节力矩。3个定制的惯性传感器模块(可穿戴式传感器JY-901B; 内含3轴加速度计; 角速度计, 外形尺寸为1.1 cm× 1.1 cm× 0.5 cm)由电池模块供电配蓝牙通信, 通过魔术贴固定在小腿、大腿和上身3个肢段在体侧的质心位置, 在矢状面内位置关系如图2中各肢段上小方框(传感模块)位置所示。单片机用来获取和处理加速度和角速度传感器的数据, 采样频率为100 Hz, 并与上位机实时通信。在初始校准过程中, 两个压力板水平固定放置在脚下和椅子上。每个惯性传感器模块在各肢段固定后, 其在矢状面内X轴方向沿矢状面内肢段骨骼一致的方向调整, 并尽量保证各模块的X轴与所在肢段骨骼轴向一致。光学运动分析系统用于跟踪和测量实验者肢段上全反射标记点的运动学信息, 采样频率同样为100 Hz, 动态校准误差为0.22%。然后通过软件(EVaRT 5.0)分析得到人体肢段运动角度、角速度和加速度等运动学参数, 用于计算关节力矩, 并与所搭建的可穿戴式体外传感检测系统做对比分析。
 | 图2 一组健康实验对象实验图Fig.2 A set of experimental figure of healthy subjects |
为了在比较理想的实验条件下初步验证所构建的体外传感检测系统可用性和精确性, 验证实验仅招募了5名健康且没有下肢肌肉和骨骼伤病的男性, 以及5名具有不同程度站起困难但最终可以独立完成站起动作的男性患者。实验对象平均统计特征如下:健康组年龄为(26.1± 5.3)岁; 体重为(65.3± 7.5) kg; 身高为(173.5± 6.7) cm; 患者组年龄为(55.1± 6.1)岁; 体重为(67.3± 6.3) kg; 身高为(171.4± 3.5) cm。在各实验对象熟悉实验器材后, 每位实验对象在实验初始状态均坐在预设好的高0.45 m的座位上的力平台之上, 上身保持竖直状态, 双手自然向前置于双腿膝盖之上, 双脚向前, 左右距离以个人平时坐姿习惯为准。之后, 每位对象均被要求自主自然地完成站起动作, 同时采集实验数据。按实验结果统计, 5名健康的实验对象站起时间均在3 s左右, 5名患者站起时间均未超过7 s。
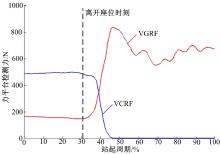
按照前述方法和计算公式, 利用Matlab软件处理可穿戴传感系统和摄像系统所有实验数据, 通过截止频率为20 Hz的高通滤波器来去除所有初始数据的噪声, 每一位健康实验对象和患者都分别使用自主开发的可穿戴传感器系统和实验室参照摄像系统同时进行数据检测, 最终得到每一组实验对象的两处测压力板压力值、下肢各肢段角度、角加速度以及计算出来的下肢各关节力矩, 如图3~图10所示。
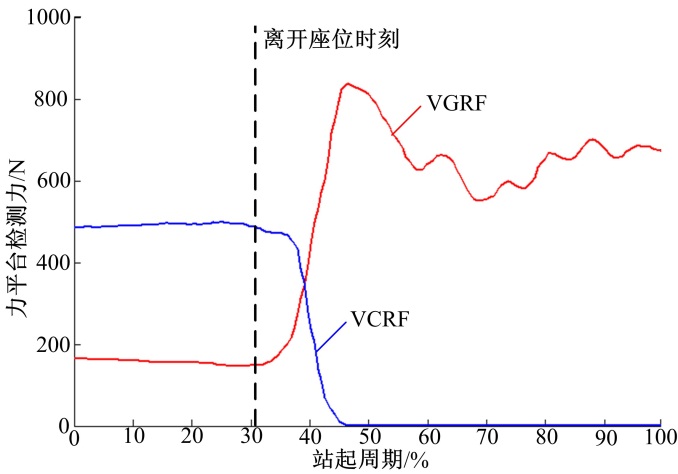 | 图3 一组健康实验对象站起过程座椅上(VCRF)和地面上(VGRF)两块压力板测量结果对比Fig.3 Comparison of force data measured from chair and ground during STS of healthy subjects |
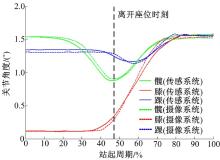
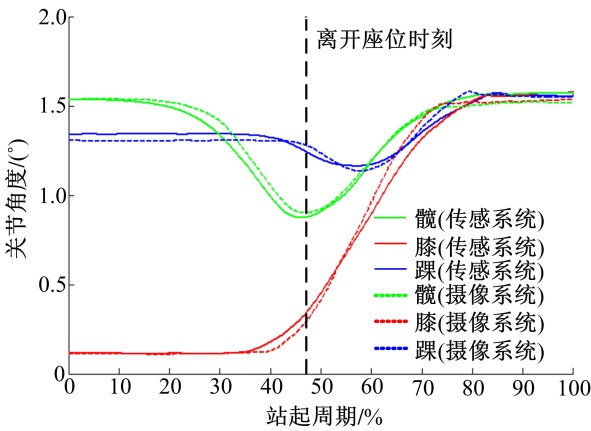 | 图5 一组健康实验对象站起过程的髋、膝、踝关节角对比Fig.5 Comparison of joint angles of hip、knee and ankle during STS of healthy subjects |
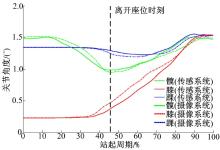
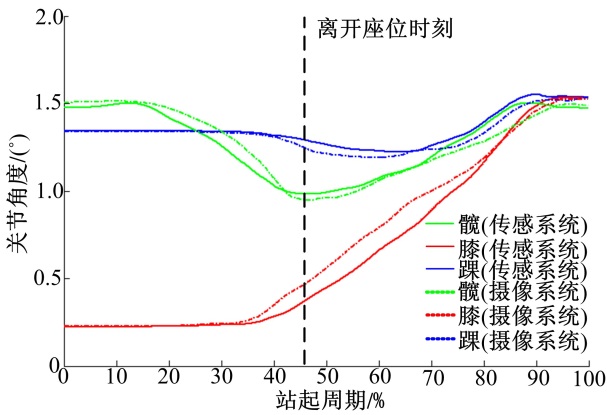 | 图6 一组患者站起过程的髋、膝、踝关节角对比Fig.6 Comparison of joint angles of hip、knee and ankle during STS of patients |
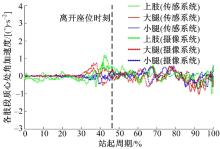
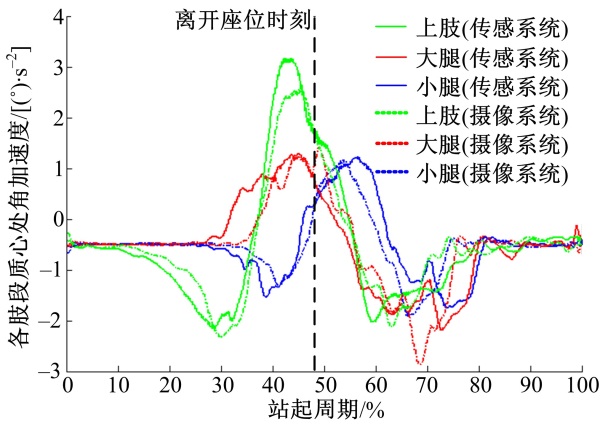 | 图7 一组健康实验对象站起过程的各肢段质处心角加速度对比Fig.7 Comparison of angular acceleration of segments during STS of healthy subjects |
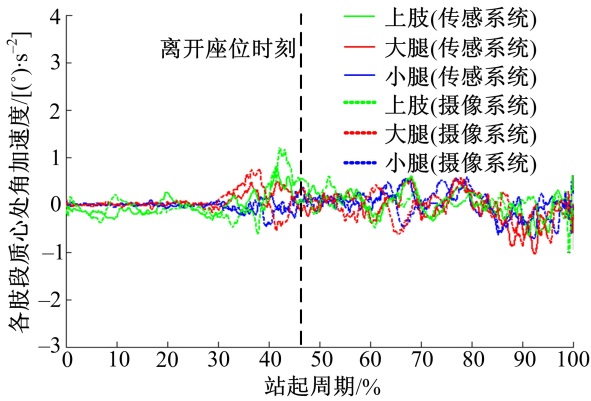 | 图8 一组患者站起过程的各肢段质心处角加速度对比Fig.8 Comparison of angular acceleration of segments during STS of patients |
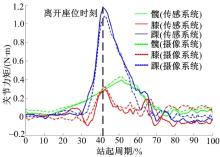
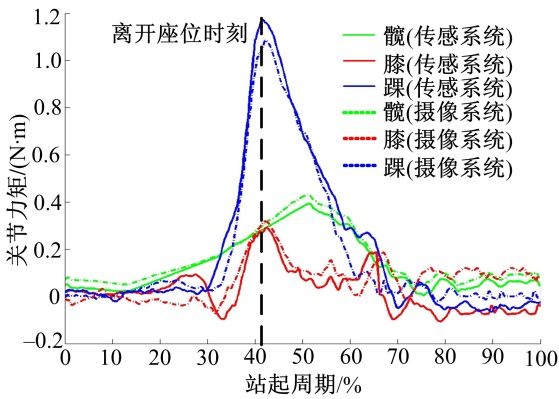 | 图9 一组健康实验对象站起过程中各关节力矩对比Fig.9 Comparison of joint moments of lower limbs during STS of healthy subjects |
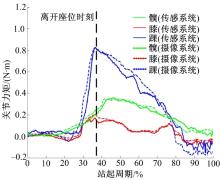
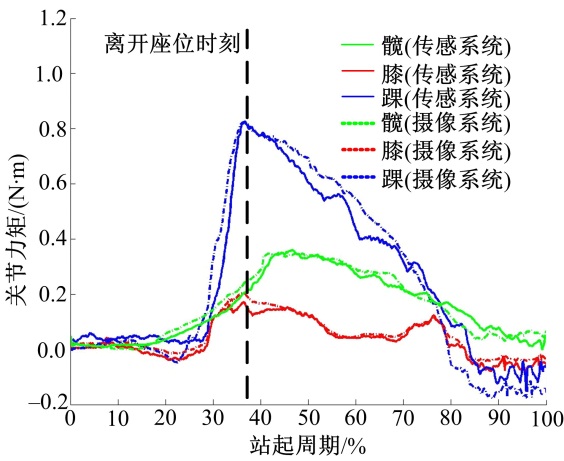 | 图10 一组患者站起过程中下肢各关节力矩对比Fig.10 Joint moments of lower limbs during STS of patients |
为了以实验室参照摄像系统所测数据作为比照对象, 评估可穿戴传感器系统准确性, 对5名健康实验对象和5名患者在站起过程中所获得的运动学和动力学参数进行了比较和分析, 对比参数如表1和表2所示, 其中RMSE是参考值和计算值所得差的均方根值, R是相关系数, emax是最大误差, ROM的关节力矩范围。两组实验对象均根据所用站起时间由短到长顺序排列。为减小偶然误差, 每一位实验对象的各做3次实验, 并且各参数以站起周期100%做归一化处理, 之后取再取平均值, 表3给出了5次实验同步归一化参数。
| 表1 采集健康实验对象站起运动学数据, 计算出的髋膝踝关节力矩实验结果对比分析 Table 1 Comparison and analysis of joint moments of hip、knee and ankle calculated by kinematics data captured of healthy subjects |
| 表2 采集的患者站起运动学数据, 计算出的髋膝踝关节力矩的实验结果对比分析 Table 2 Comparison and analysis of joint moments of hip、knee and ankle calculated of patients |
| 表3 基于健康对象和患者五次实验同步归一化平均的人体站起动力学和运动学参数分析 Table 3 Analysis of kinetic and kinematic parameters(ensemble-average of five trials) based on data acquired from healthy subjects and patient |
图4和图5分别给出了一组健康实验对象和患者站起过程座椅上(VCRF)和地面上(VGRF)两块压力板测量结果, 其中可以准确找出人体离开座位的时刻, 用于各参数以站起周期为100%做归一化处理的标准参考点。图6~图8比较了所开发的传感器系统和作为参照的光学摄像系统得到的同一站起过程的关节角度和肢段质心处的角加速度, 发现从两系统得到的图像除了一些细小的差异外基本相同。产生这些差异的主要原因在于人体下肢肢段是不规则的近似锥状柱体, 导致初始安装时很难保证传感器模块的两轴在矢状面上与光学摄像系统拍摄的全反射点连线表征的骨骼模型完全统一, 因此所计算出的关节角度、角加速度和力矩并不能百分之百反应肌骨模型下人体站起运动, 即存在系统误差。而站起运动过程中因肌肉的运动导致其表面所穿戴的传感模块也会有随机测量误差存在。表1和表2给出了通过惯性传感器和摄像系统得到的下肢关节力矩比较分析, 数据显示对所有实验对象, 更快的站起速度对应更好的测量精度。因为人体本身不是刚体, 所以在柔软的人体肢段表面固定可穿戴式传感器比固定在刚体上保持稳定、精确度更困难。而存在下肢运动功能困难的患者在站起过程中以较低速度站起时, 由于发生较多的肢段颤动会对最终数据的精确性产生影响, 从而导致更大的最大误差。但分析结果仍表明, 通过可穿戴传感器与光学摄像系统得到的关节力矩二者相关系数较大(R> 0.93), 基于该方法开发的可穿戴传感器系统可用于体外检测分析站起康复训练过程中的关节力矩。但是由于本文实验对象仅限于5名处于康复训练的患者和5名健康对象, 其结果不能涵盖所有的站起康复训练的患者情况。因此, 在后期应用过程中, 为了进一步验证所研制的可穿戴传感器系统的精度, 仍需要招募更多的受验对象和采集更多的站起状态进行统计分析, 以验证该系统的可靠性和有效性。
本文开发的测试系统主要侧重了人体由坐到站起过程中矢状面内的运动力学参数, 尽管这是人体站起过程中最主要的运动, 但考虑到患者可能存在的代偿现象, 在后续研究工作中还将对其他两个平面的相关参数进行检测和研究, 通过人体相应运动过程中的三维运动力学参数的系统对比分析进一步评测所开发测试系统的精度。本文所给出的方法计算关节角度和关节力矩时没有加速度或角速度的积分, 计算结果不受积分累积误差的影响, 是对传感检测方法的创新。所开发的传感检测系统, 相较于成本高、占用空间大的光学摄像动作捕捉系统, 可以提供关节力矩定量检测和分析, 并且适用于患者在家中连续监测康复运动状态, 也可以为开发可穿戴外骨骼辅助系统所需实时反馈关节力矩提供方法参考。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|