



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于电液耦合转向系统的商用车防失稳控制
[赵伟强1  , 高恪
, 高恪1 , 王文彬2 ]
, 高恪|
|


作者简介:赵伟强(1977-),男,副教授,博士.研究方向:商用车系统动力学仿真与控制.E-mail:zwqjlu@163.com
基于一种电液耦合转向系统进行商用车中、高速转向行驶失稳预防控制研究,采用转向力矩控制方法,通过主动调整助力使车辆时刻行驶在稳定区内,从而达到预防车辆失稳的目的。简述了电液耦合转向系统结构,进而对利用转向系统预防车辆失稳的可行性进行了说明,并建立了车辆2-DOF参考模型,采用柔性PID与自适应递增算法对线性和非线性两种行驶状态进行单独控制,得到补偿力矩。利用所搭建的电液耦合转向系统硬件在环试验台对提出的控制方法进行验证,结果显示,车辆处于临界失稳状态时电机助力矩与转向轮转角减小,横摆角速度减小,有效保证了车辆时刻行驶在稳定区域内。
The commercial vehicle is prone to instability when the vehicle is turning and driving at high speed. The control of the prevention of instability is carried out based on a kind of electric-hydraulic coupling steering system. A method of torque control is adopted that the power is actively adjusted to ensure the vehicle driving in the stable area to prevent instability. First, the structure of electric-hydraulic coupling steering system is briefly described. Second, the theoretical analysis of the vehicle instability is carried out, then the steering system can be used to control the stability of the vehicle and the 2-DOF reference model is built. Third, based on the flexible PID, the desired value of the yaw rate is tracked. The adaptive increasing algorithm is used to reduce the power of assist motor when the driving condition exceeds the stable area. Considering the change of road adhesion coefficient, the vehicle stable for prevention of instability can be obtained. The output value to the motor consists of the compensation value and the basic power value. The power characteristics of the motor are adjusted by the compensation value, so as to achieve prevention of instability control of commercial vehicles on different roads. In order to verify the control method, a hardware in the loop experiment based on electric-hydraulic coupling steering system was carried out. Results show that when the vehicle is in a critical state, the torque of the motor and the steering wheel angle both decrease, the yaw rate decreases. Therefore, the instability phenomenon can be effectively suppressed using the proposed method on different roads.
为降低车辆事故的发生, 科研人员普遍采用被动安全和主动安全两类安全技术。被动安全技术指采取一定措施降低事故发生后所产生的不良影响, 如安全带、气囊等; 主动安全是一种预防性措施, 旨在降低事故发生的可能性。调查显示[1], 现有交通事故中, 约75%的事故由驾驶员操作失误引起, 被动安全技术已经不能缓解交通事故造成的危害, 而主动安全能够提升车辆稳定性并且能够避免一些潜在危险, 近年来得到了广泛关注。
商用车具有重心高、质量和体积较大且车辆宽高比过小的特点, 这会使商用车更易发生失稳危险, 带来巨大的经济损失和人员伤亡。因此, 对于商用车失稳预防控制的研究具有一定的现实意义。关于商用车稳定性控制在国内外文献中有较多研究, 研究方向主要分为两个方面:其一是基于制动系统对车轮驱动/制动力矩进行分配控制, 如宗长富等[2]提出的基于动态LTR客车防侧翻控制方法、Gao等[3]基于单个车轮特性设计的分层控制e-drive ASV系统; 其二是集成转向系统与制动系统进行联合控制, 如采用上、下双层控制模式, 上层控制器决策出期望转角和车轮转矩, 下层控制器控制ABS/EBS执行器和转向执行器, 执行响应动作[4]。此外, 在进行纵向力与侧向力分配时, Kim等[5]考虑了摩擦椭圆的影响并取得了较好的控制效果。利用转向系统进行稳定性控制比纵向力控制响应更快, 不会对车辆的纵向速度造成影响, 不会因施加非对称制动/驱动力而产生附加的路径偏移[6], 因此转向系统参与稳定性控制具有其内在的独特优势。目前, 关于转向系统参与稳定性控制的研究主要集中在主动转向及四轮转向上, 如Huang等[7]基于前轮主动转向系统进行车辆抗干扰稳定性控制研究、Liu[8]对重型车辆多轴转向控制进行研究、Wang等[9]进行了主动转向与四轮独立驱动/制动的集成控制研究, Cairano等[10]对前轮主动转向和差动制动联合控制进行了研究。以上研究都取得了较为理想的稳定控制效果。然而主动转向系统(无论是前轮、后轮或四轮转向)虽能实现车辆稳定性控制, 但制约其发展的因素较多, 存在转向系统结构改变较大、执行元件复杂、成本较高等问题。
本文设计了一种商用车电液耦合转向系统(Electric-hydraulic coupling steering system, EHCS), 使乘用车EPS的高级功能在商用车上得以应用, 从而起到预防车辆失稳的目的, 并且该系统为商用车转向系统电动化、智能化的发展可以打下良好基础。因转向系统参与稳定性控制仅在线性区内有较好的效果, 一旦轮胎进入非线性区域, 轮胎侧向力易达到饱和, 此时转向系统对车辆稳定性控制的贡献不大[11], 因此本文所设计的控制方法主要目的在于对车辆失稳进行预防, 即时刻保证车辆处于线性区内。基于电液耦合转向系统进行车辆失稳预防控制的基本思路如下:通过建立二自由度操纵模型得到车辆横摆角速度期望值, 利用车辆横摆角速度传感器测量横摆角速度实际值, 若两者存在偏差, 则通过所设计的柔性控制器决策出助力电机补偿力矩, 从而调整助力电机输出值, 改变车辆转向助力状态以消除偏差, 实现失稳预防控制。同时, 设计了考虑路面附着系数、车速及转向角的商用车稳定域, 若车辆实际转向角超出稳定域范围, 进入非线性区域, 则放弃跟踪横摆角速度期望值, 转为自适应控制, 调整电机助力矩使车辆行驶状态回到稳定域内。
电液耦合转向系统以传统液压助力转向系统为基础, 在液压转向机输入轴上端集成助力电机和减速机构, 通过对助力电机的控制, 实现主动力矩调节的功能。所采用的电液耦合转向系统与当前电控液压助力系统的区别在于无需增加复杂的阀体结构, 对传统液压助力系统改动较小, 且电机调节更为简单、直接, 易于实现主动控制。
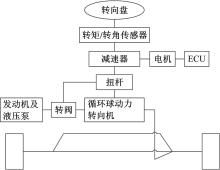
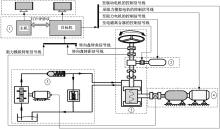
图1为电液耦合转向系统结构图, 图中电机助力与驾驶员手力共同施加到动力转向总成处, 与液压助力进行耦合, 在系统设计中, 将电机助力与驾驶员手力作为整体考虑, 电机助力的变化只会对驾驶员手力产生影响, 对液压助力系统影响较小, 因此液压系统助力特性的具体变化在本文中可不予考虑。
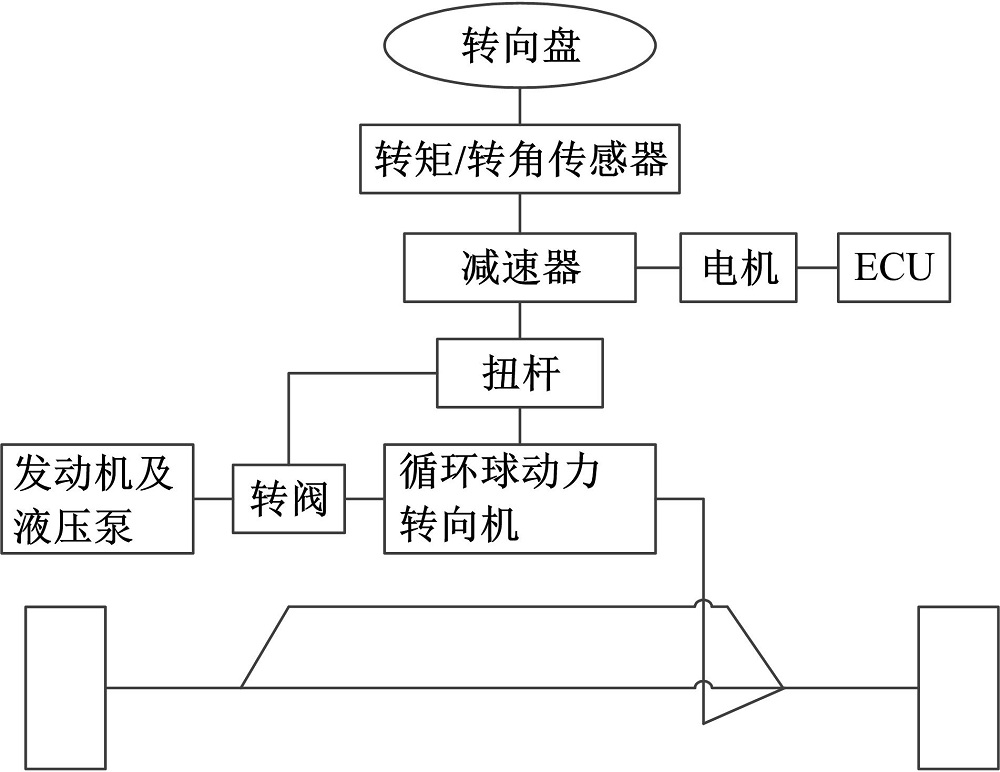 | 图1 系统结构图Fig.1 System structure diagram |
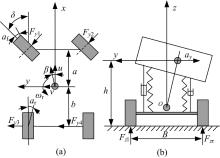
建立包括侧向、垂向、横摆和前轮转角的4自由度模型, 如图2所示, 基于该模型分析转向系统对车辆稳定性的影响[12]。
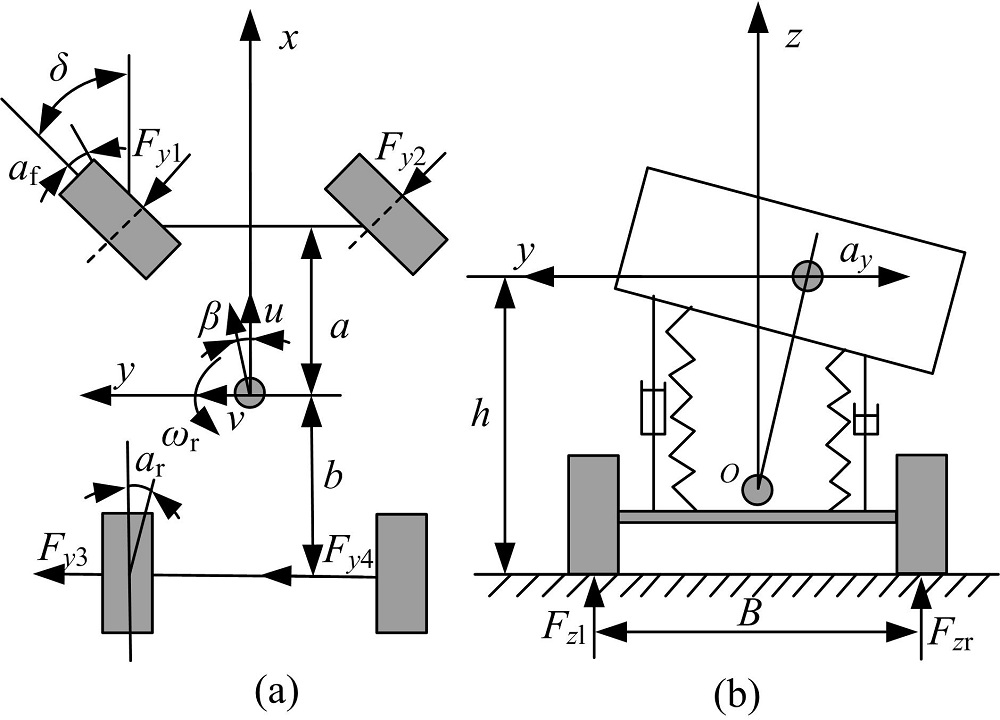 | 图2 车辆四自由度模型简图Fig.2 Vehicle four-degree-of-freedom model |
通过图2得到车辆侧向动力学方程为:
式中:
横摆动力学方程为:
式中:
当不考虑载荷转移时, 可以将以上模型简化为三自由度操纵模型, 如图2(a)所示。
车辆前、后轮处侧偏角为:
式中:
根据
式中:
前轮转角
转向引起的左、右载荷转移如下式:
式中:
前轮转角增大,
左、右两侧车轮垂向载荷为:
由上述分析可知, 随着
图3为转向参与稳定性控制流程框图, 驾驶员输入信号同时传递给实车与车辆参考模型, 由车辆实际转角、车速和路面附着系数判断车辆行驶状态是否处于稳定域内, 若车辆处于稳定域, 则采用柔性PID的控制方法对横摆角速度期望值进行跟踪控制; 若车辆处于稳定域外, 则采用自适应递增控制方法减小助力矩, 直到车辆重回稳定域后继续进行横摆角速度期望值的跟踪控制。
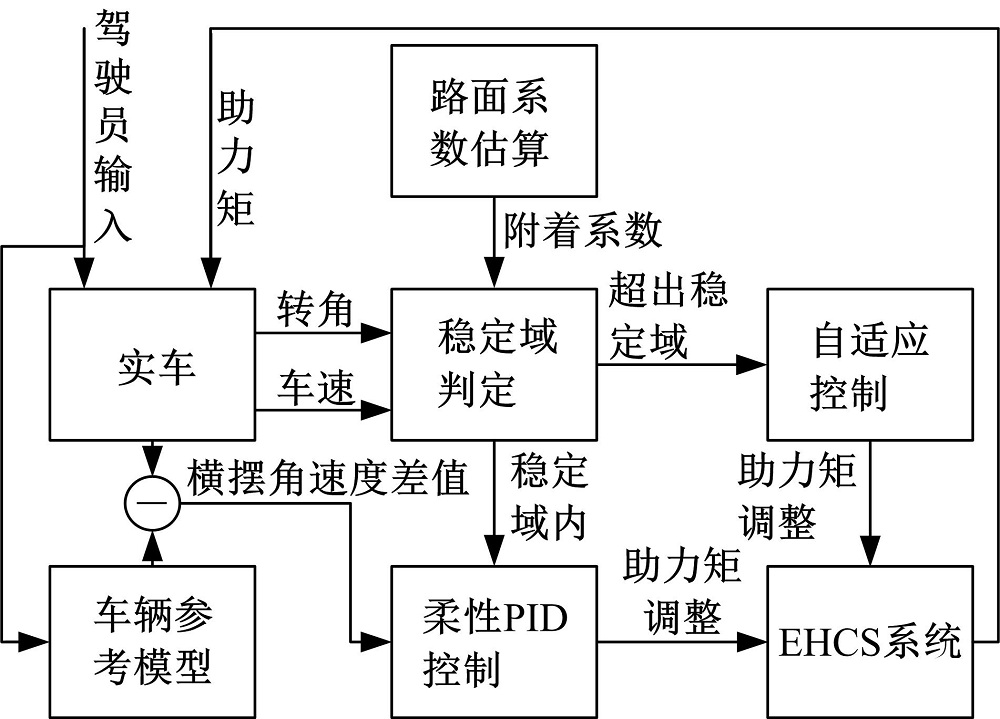 | 图3 稳定性控制流程图Fig.3 Flow chart of stability control |
为了保证车辆不发生失稳现象, 实际横摆角速度需时刻跟踪期望横摆角速度, 当横摆角速度实际值超出期望值时, 助力电机要主动减少助力; 当实际值低于期望值时, 需主动增加助力。
PID控制作为成熟的工业用控制方法, 操作简单, 便于使用。然而常规的PID控制存在一些准确性和稳定性的问题。本文为解决两者之间的矛盾设计了柔性PID控制方法, 根据横摆角速度实际值与期望值之差实时调整控制器的参数, 以增强系统的鲁棒性。表1为PID控制器参数变化规则, 其中
| 表1 柔性PID参数变化规则 Table 1 Parameter rule of flexible-PID |
车辆处于转向状态时, 转向输入力矩需要克服转向阻力, 转向阻力主要包括回正力矩和摩擦力矩。赵林峰等[15]指出, 较高的车速下在较低附着系数路面上行驶, 路面和轮胎之间产生的回正力矩会大幅减小。目前研究尚无转向阻力矩与路面附着系数之间精确的关系公式, 因此本文通过TruckSim仿真实验得到两者之间的关系。
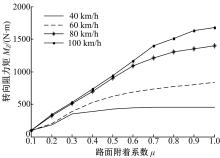
实验中, 所选车辆前轴载荷为50 kN, 转向盘输入为阶跃信号, 路面附着系数从0.1增加到1.0, 得到前轮主销处转向阻力矩变化如图4所示。从图中可以看出, 在不同车速下, 随着路面附着系数的增加, 转向阻力矩不断增加, 且增加幅度较大, 说明附着系数对转向阻力矩的影响很大。若驾驶员没有意识到路面附着系数的变化, 其操作可能会导致车辆未按照期望状态行驶, 甚至导致车辆失稳。同时路面附着系数还会影响轮胎与路面之间受力情况, 因此对车辆稳定性影响很大。
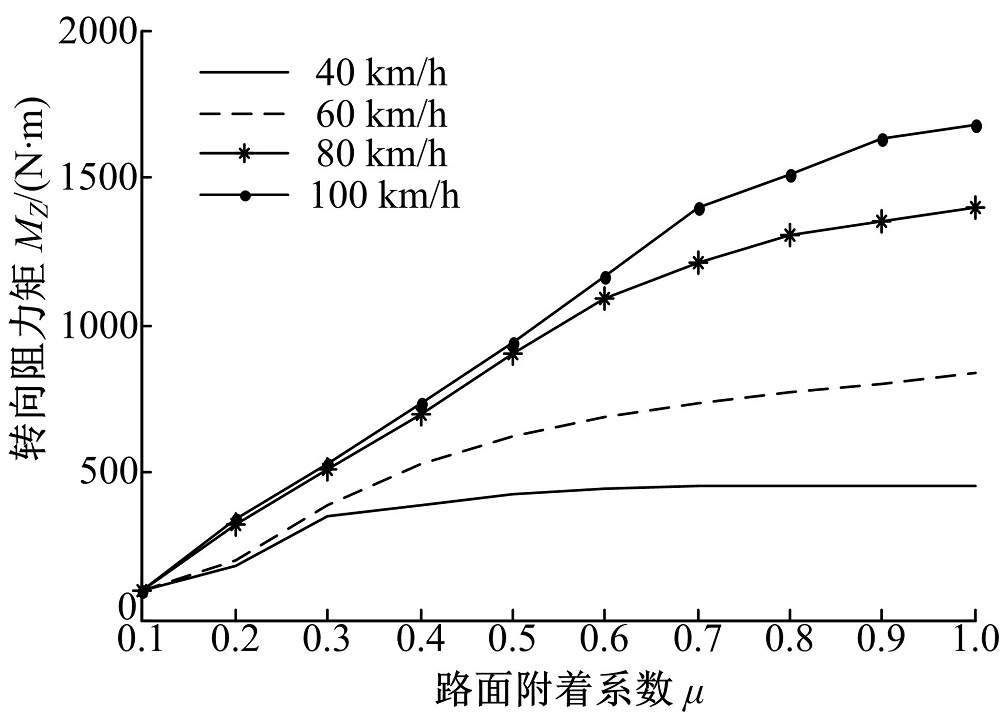 | 图4 路面附着系数对转向阻力矩的影响Fig.4 Influence of surface adhesion coefficient on torque of steering resistance |
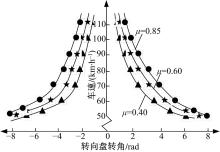
本文针对车辆行驶在非线性区域易失稳的情况, 提出一种考虑路面附着系数的车辆稳定域概念。车辆稳定域是指当车辆以一定车速行驶在某一附着路面上时, 若转向角处于稳定边界曲线以内, 则车辆能够保持稳定行驶。本文以路面附着系数和车速作为输入, 基于TruckSim软件对转向角稳定范围进行测试, 得到低附、中附和高附3个状态下车辆稳定域如图5所示。从图中可以看出, 随着车速的增加, 转向角边界逐渐缩小, 当车速较高时, 车辆易进入非线性区。同时, 不同路面附着系数所决定的车辆稳定域范围也不同, 随着附着系数增大, 则稳定域逐渐变宽, 说明在附着系数大的路面上, 车辆不易失稳。
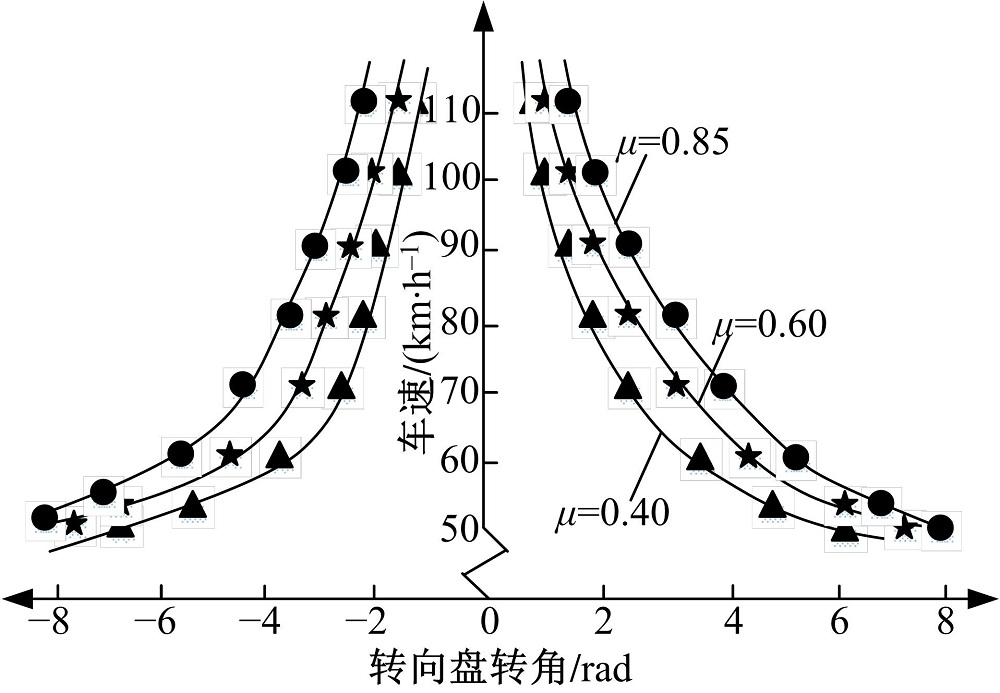 | 图5 不同附着路面下车辆稳定域曲线Fig.5 Curve of vehicle stability under different adhesion road surface |
文中所用到的路面附着系数估算方法不作为本文研究重点, 因此控制策略中所采用路面附着系数估算方法主要参考文献[16]。
车辆行驶在稳定域之外, 若助力矩降幅过大会引起驾驶员紧张感。设计一种基于稳定域溢出程度的自适应递增方法来逐渐降低转向助力矩, 在不引起驾驶员反感的前提下对车辆进行调节且避免反向助力以防止打手现象的出现。补偿力矩计算公式如下:
式中:
本文搭建电液耦合转向系统试验台对控制方法进行验证, 试验台结构如图6、图7所示, 主要包括:①LabVIEW实时仿真平台; ②电机助力系统; ③液压助力系统; ④阻力模拟系统(采用电机模拟方式); ⑤转向机械结构。LabVIEW数据采集系统采集转向盘转角信号、转向盘转矩信号发送给整车模型, 经过整车模型计算后分别将转向阻力矩信号发送给阻力模拟系统, 将助力电机助力信号发送给助力电机驱动器。考虑到利用发动机驱动液压泵的实施困难程度, 本文利用可调速电机代替发动机驱动液压泵, 其控制信号同样来自LabVIEW实时仿真控制平台。
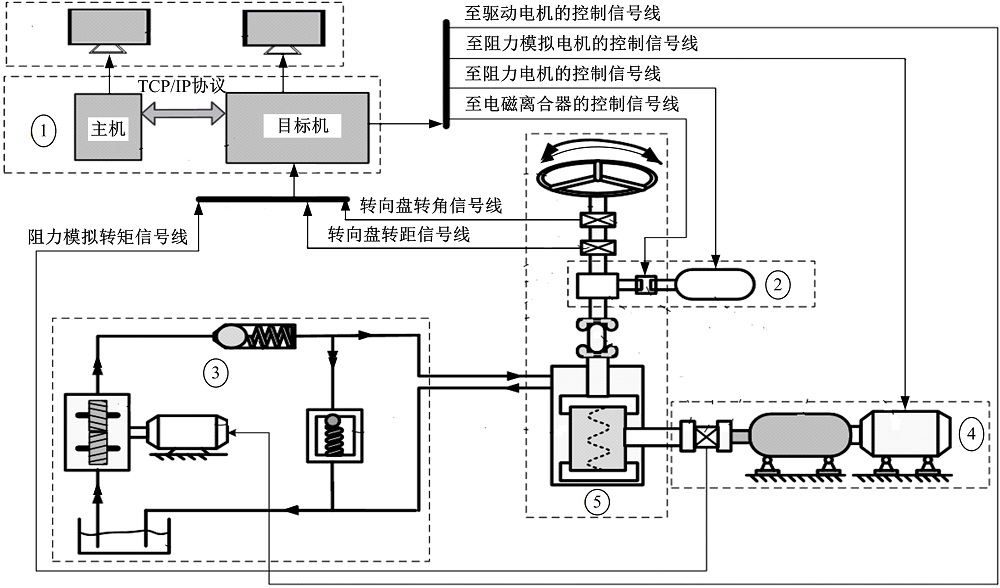 | 图6 HIL试验台逻辑结构框图Fig.6 Logic structure diagram of HIL test bench |
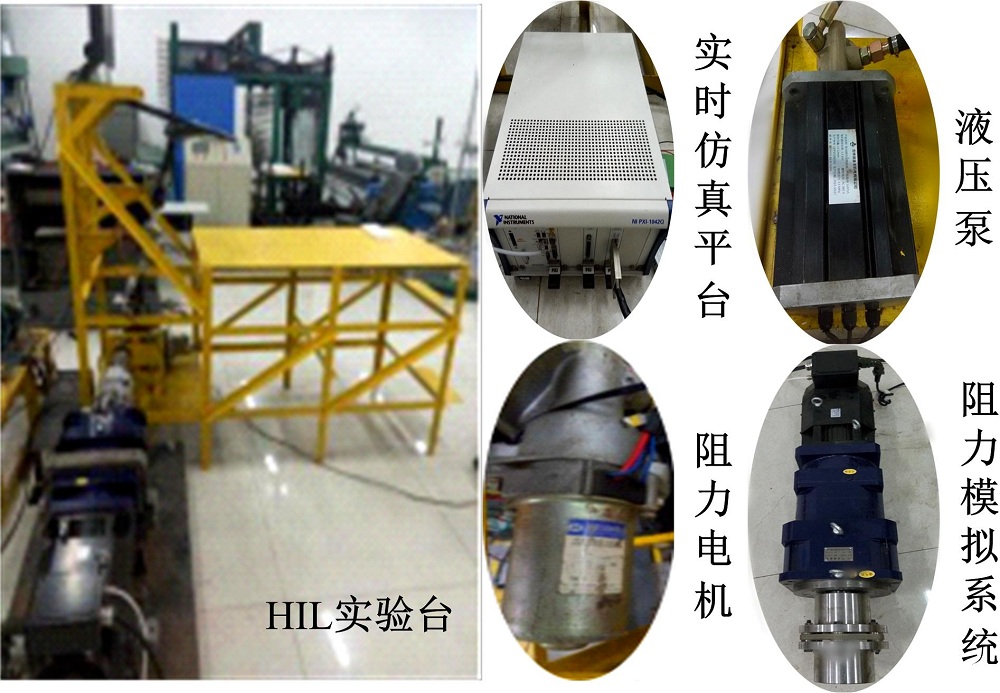 | 图7 HIL试验台实物图Fig.7 HIL test bench |
通过上述硬件在环试验台对提出的控制方法进行验证, 实验所采用EHCS系统基本参数如下:额定电压为 DC24 V; 额定转速为1600 r/min; 适用油压为15 MPa; 油泵流量为18 L/min; 额定功率为640 W; 适用前轴载荷为85 kN; 最大输出扭矩为7056 N· m; 传动比为23.27。车辆部分参数如下:整备质量为10 000 kg; 簧载质量为6360 kg; 高度为3430 mm; 宽度为2600 mm; 发动机功率为175 kW; 转向传动比为23.27; 前轴载荷为50 kN; 前轴距离为3106 mm; 前、后轮距分别为2030、1863 mm。
验证工况:因车速过低不易发生失稳, 选取车速为70 km/h和100 km/h; 考虑到实际实验操作和数据观测的难度及可重复性, 驾驶员以手力矩近似正弦曲线的方式转动转向盘, 通过与双移线工况对比, 发现此种工况同样能很好地反映车辆失稳状态信息。路面附着系数分别设置为中附0.6和高附0.85, 验证车辆侧滑和侧翻时的控制效果。
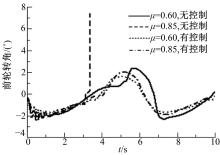
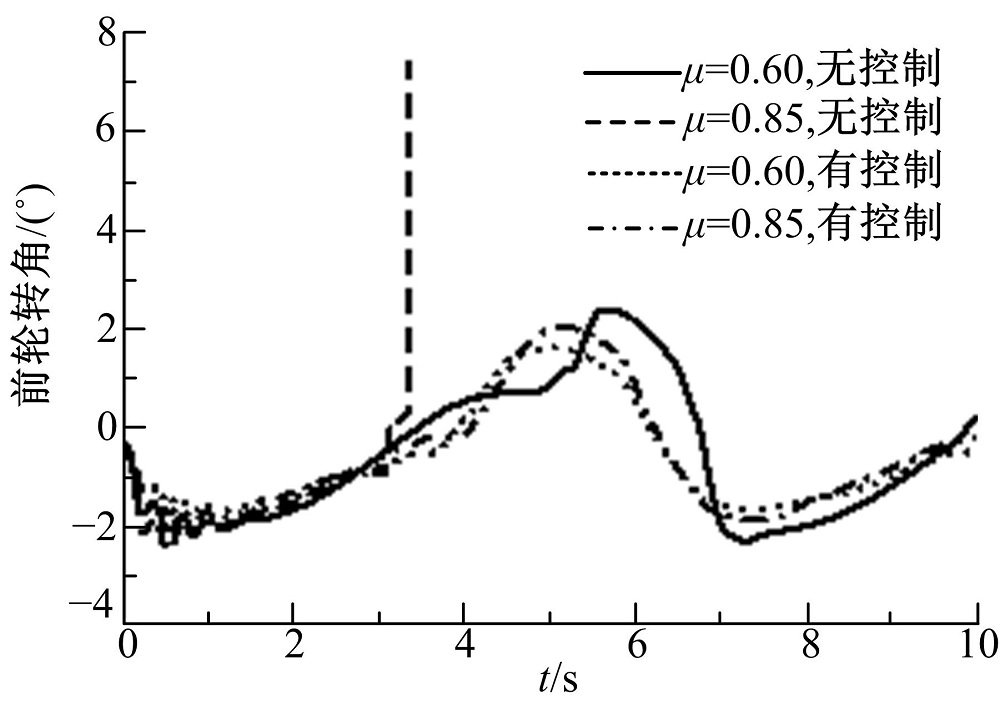
图8~图12为车速70 km/h的实验曲线。其中, 图8为不同路面附着系数下前轮转角变化情况, 从图中可以看出, 在μ =0.6时, 无补偿控制车辆处于临界失稳状态, 在接近10 s时车辆失稳; 在μ =0.85时, 无补偿控制车辆在3.5 s附近发生失稳。同样工况下, 有补偿控制车辆前轮转角比无补偿控制车辆减小25%, 前轮转角减小的原因是车辆即将失稳时电机助力矩主动减小, 施加到转向系统上的总力矩减小, 前轮转角相应减小, 预防车辆失稳。
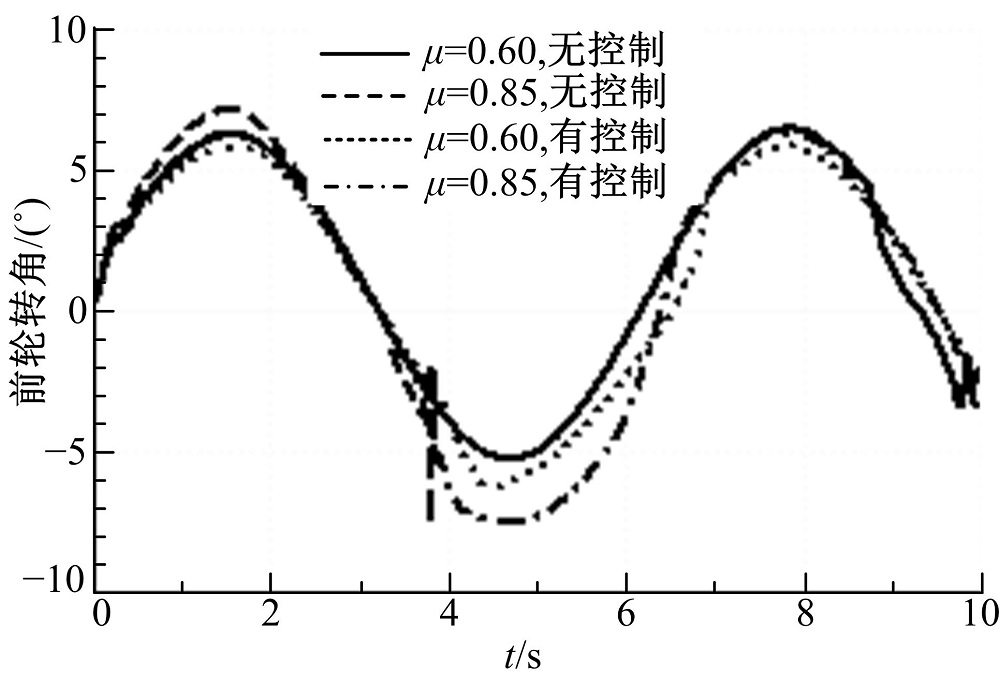 | 图8 不同路面附着系数下的前轮转角Fig.8 Front wheel angle of different road adhesion coefficient |
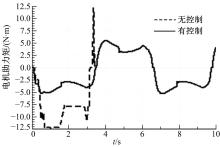
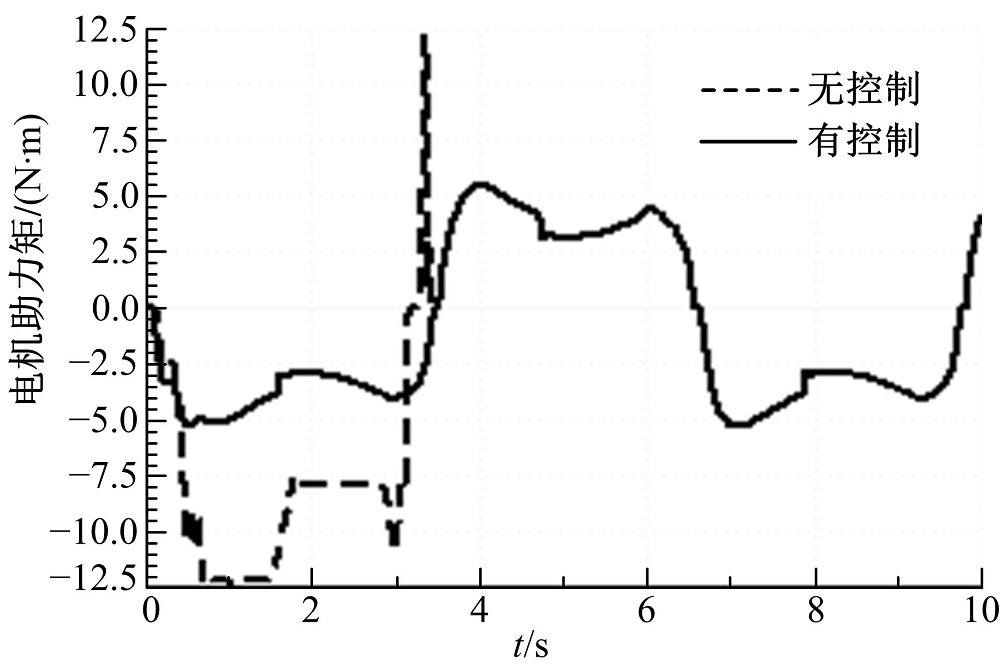 | 图9 μ =0.85时电机助力对比Fig.9 Contrast of motor assisted power at μ =0.85 |
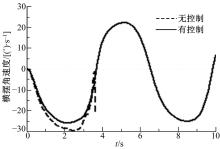
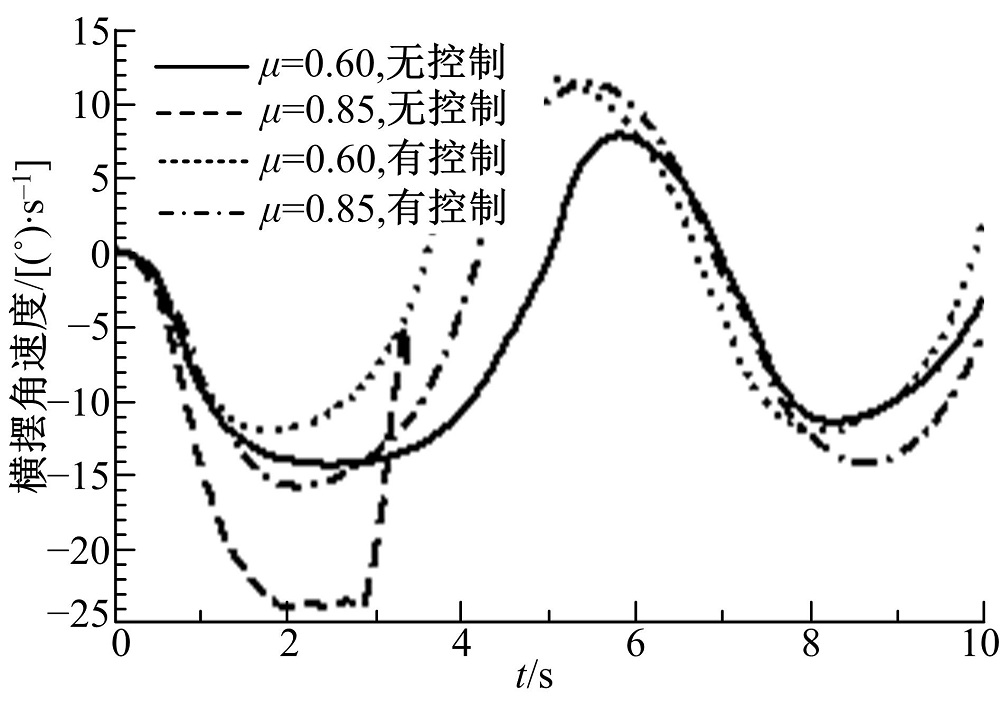
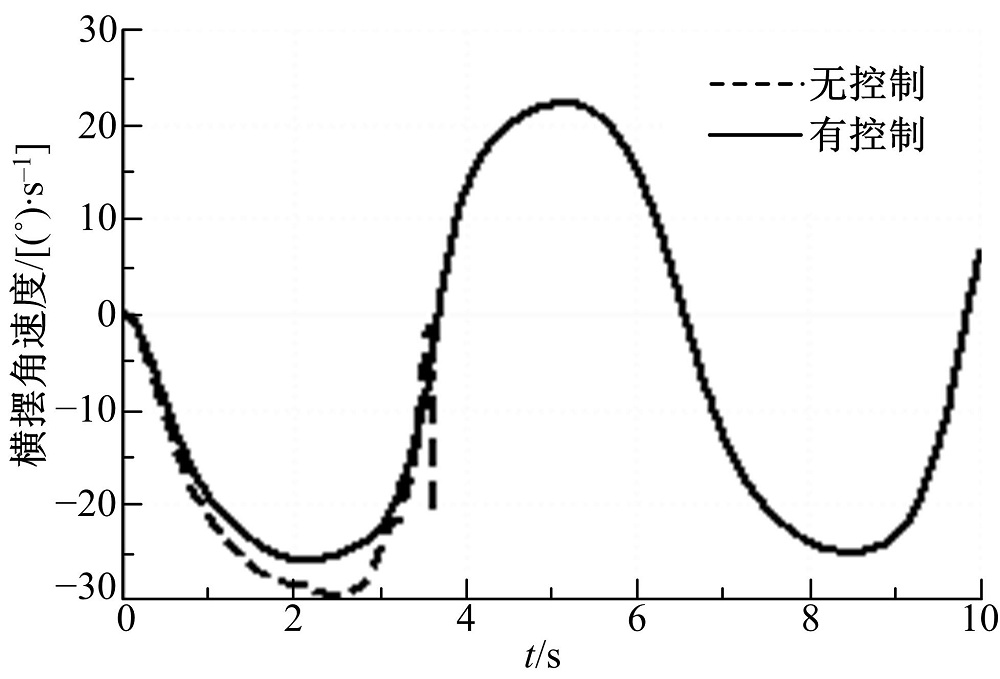 | 图10 μ =0.85时横摆角速度对比Fig.10 Contrast of yaw rate at μ =0.85 |
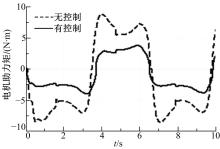
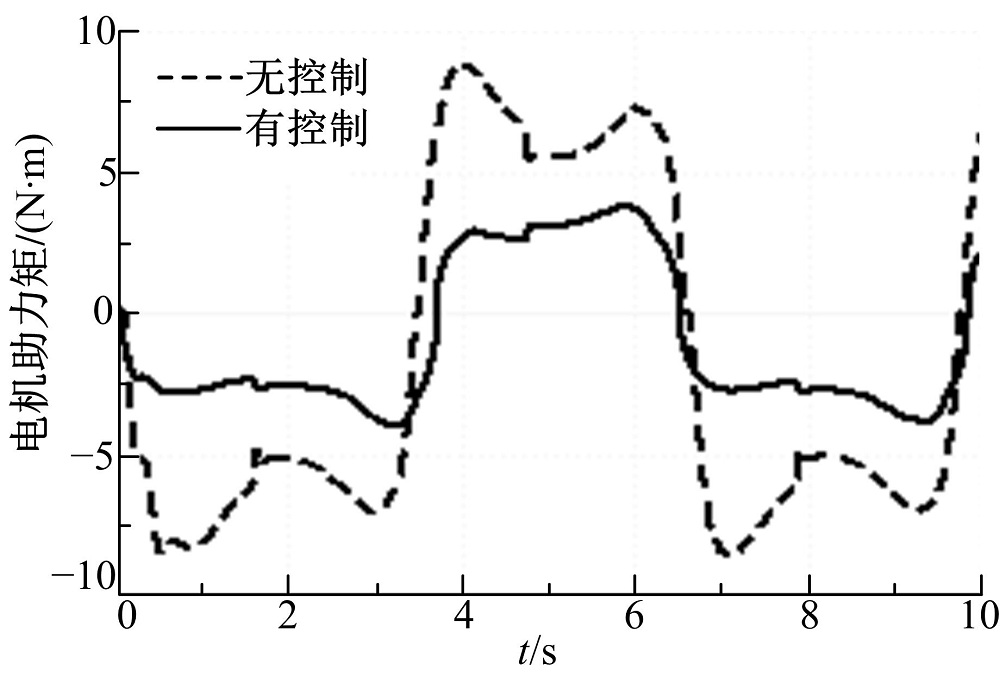 | 图11 μ =0.6时电机助力对比Fig.11 Contrast of motor assisted power at μ =0.6 |
 | 图12 μ =0.6时横摆角速度对比Fig.12 Contrast of yaw rate at μ =0.6 |
在路面附着系数μ =0.85时, 电机助力矩和横摆角速度对比曲线如图9和图10所示。可以看出, 无补偿控制时, 电机助力矩较大, 且在3.5 s附近失去控制。有补偿控制时, 由于补偿力矩的作用使得电机助力矩减小60%, 横摆角速度降低20%左右。在路面附着系数μ =0.6时, 电机助力矩和横摆角速度对比曲线如图11和图12所示, 电机助力矩和横摆角速度分别减少52%和63%。
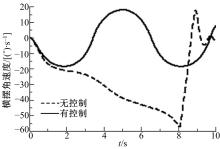
100 km/h车速为有/无控制时车辆前轮转角及横摆角速度对比曲线如图13、图14所示。与70 km/h车速相似, 带有补偿控制的前轮转角减小21%左右, 车辆横摆角速度降低67%, 可有效预防车辆失稳。
 | 图13 前轮转角对比Fig.13 Contrast of front wheel angle |
 | 图14 横摆角速度对比Fig.14 Contrast of yaw rate |
对图8、图13、图14进行单独分析可知, 前3.5 s车辆前轮转角和横摆角速度曲线变化差别不大。造成此现象的原因是, 此时车辆行驶状态超出稳定域, 车辆放弃对期望横摆角速度的跟踪, 转而进入到稳定域自适应控制, 仅控制车辆进入稳定域内。3.5 s后车辆回到稳定域内, 又重新跟踪期望值。此种控制方法最大程度上保证了车辆能够时刻行驶在稳定区域内。
(1)针对目前商用车在中、高速转向行驶工况下易失稳的现象, 基于一种电液耦合转向系统进行了商用车失稳预防控制方法的设计, 相比于现有稳定性控制方法, 基于EHCS转向系统进行控制响应更快、易于实现且成本更低。
(2)将车辆行驶状态分为线性与非线性两种情况进行处理, 若车辆行驶在线性稳定区内, 利用柔性PID的方法对横摆角速度期望值进行跟踪控制; 若车辆行驶在线性稳定区外, 则参考所建立的车辆行驶稳定域, 利用自适应递增的方法控制车辆重回线性稳定区。
(3)基于所搭建的硬件在环试验台对控制策略进行验证, 结果显示所提出的方法能够有效控制车辆行驶在线性稳定区内。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|