基于二次规划的分布式电动汽车稳定性控制
 , 谢宪毅
, 谢宪毅Distributed electric vehicle stability control based on quadratic programming
JIN Li-sheng1 , XIE Xian-yi1 , GAO Lin-lin2 , GUO Bai-cang1
, XIE Xian-yi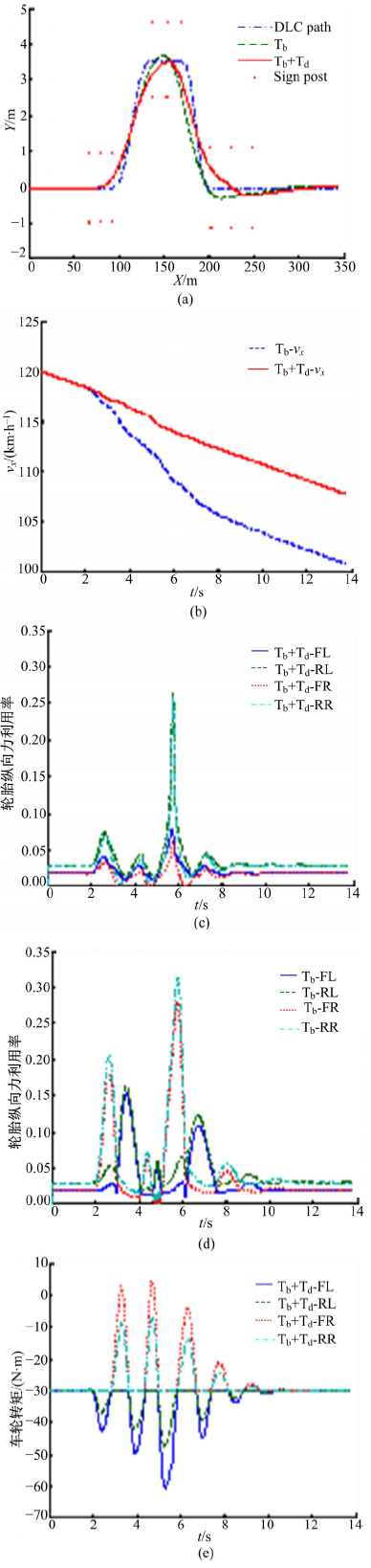
基于二次规划的分布式电动汽车稳定性控制 |
|
金立生, 谢宪毅 |
Distributed electric vehicle stability control based on quadratic programming |
|
JIN Li-sheng
, XIE Xian-yi |
| 减速试验仿真结果 |
| |