{kind=link}
基于最小二乘支持向量机的怠速时间预测
[隗海林1  , 包翠竹
, 包翠竹1 , 李洪雪1 , 李明达1, 2 ]
, 包翠竹|
|


作者简介:隗海林(1969-),男,教授,博士生导师.研究方向:汽车节能,智能交通.E-mail:khl69@163.com
汽车起停系统因其可以在汽车怠速时关闭发动机减少车辆怠速油耗而被大量应用。但在交通拥堵的实际工况下,在短时停车时使用自动起停功能反而会增加燃油消耗。针对这一问题使用基于时空学习的最小二乘支持向量机对怠速时长进行预测,在短时怠速时不关闭发动机。实验表明,本文提出的基于时空学习的最小二乘支持向量机能够对怠速时长进行预测,准确率在80%以上。将此方法应用于怠速起停控制,基于怠速预测的起停控制系统在早晚高峰节油2%左右,在平峰时节油0.2%。同时,高峰期减少50%以上的起停次数,平峰期减少15%以上的起停次数,能有效提升驾驶舒适性。
Engine start-stop system is widely used as it can reduce fuel consumption by turning off the engine while idling. But in traffic congestion conditions, the engine start-stop system increases fuel consumption because of turning off engine during short time idling. To solve this problem, Least Square Support Vector Machine (LS-SVM) is applied to predict the idling time, that the engine will not be turned off during short time idling. Experiment results show that the accuracy of idling time prediction using LS-SVM can reach 80%. The engine start-stop system using this method can reduce fuel consumption by about 0.2% during smooth hour. Meanwhile the driving comfort can be improved by reducing more than 50% start-stop numbers during rush hour and more than 15% during smooth hour.
随汽车保有量的持续快速增长, 交通拥堵问题日益严重, 车辆经常处于短时怠速状态, 使车辆在市区的油耗处在较高的水准。为了降低市区行驶油耗, 也为满足日益严格的国家乘用车燃料限值标准[1], 越来越多的汽车厂商在所生产的车辆上安装起停系统, 来达到降低发动机油耗的目的[2, 3, 4, 5]。Bishop等[2]对怠速起停系统具体的机械结构进行了研究, 并在美国的FTP工况和城际公路工况上进行了油耗测试, 燃油经济性分别提升了5.3%和4.0%。陈汉玉等[6]对发动机智能起停系统进行研究, 并使用NEDC模态工况下进行了测试, 百公里油耗比传统油耗降低3.63%。目前, 中国的车辆油耗测试均使用NEDC模态工况, 然而模态工况与实际工况有着明显差异。在早晚高峰时, 车辆行驶缓慢, 频繁处于短时怠速停车状态, 使现有的怠速起停系统频繁关闭起动发动机, 不仅加剧了相关零部件磨损、影响驾驶舒适性, 也使起停系统不能发挥应有的节油效果。目前一般乘用车的电器系统供电电压为12 V, 起动机在起动时能够将发动机的转速带到100 r/min左右, 而车辆怠速的稳定转速为750 r/min, 为了能顺利起动必须喷油加浓[7, 8]。与发动机保持短时怠速情况下的燃油消耗对比, 关闭并重新起动发动机并不能达到节油效果, 反而会增加油耗, 文献[9]中的实验表明, 一台排量约为1.5 L的发动机热起动一次的油耗相当于怠速7 s左右, 在以上分析中还没有考虑起动时蓄电池充放电对发动机油耗的影响。因此, 综合考虑各种因素, 认为怠速10 s以下关闭起动发动机即为不能节约油耗的无效起停。
有学者开始关注频繁的短时怠速工况对于起停系统所能获得效益的影响, 并根据工况的不同来优化起停控制策略[10, 11, 12]。文献[11]对拥堵工况进行判断, 提出了基于拥堵判断的起停系统多模式控制策略。文献[13]在城市道路运行工况下对起停系统的适应性进行了研究。这些研究都是对交通状态进行整体的分类, 分类后使用统一的控制规则, 而没有对每一个具体的停车工况进行预测, 对于具体的停车工况判断不够准确, 不能有效地避免无效起停。针对这一问题, 本文使用车辆当前行驶工况数据及历史数据对下一次停车工况的时间长度进行预测, 判断是否为短时停车后控制起停系统停止发动机或保持怠速。行驶工况数据为速度和加速度的时间序列, 数据维数较高类别较少, 综合考虑模型的实时性, 使用最小二乘支持向量机(Least squares support vector machines, LS-SVM)进行预测。并根据速度工况的时空特性, 提出了基于时空学习的最小二乘支持向量机怠速时间预测模型。
支持向量机模型(Support vector machines, SVM)是一种基于统计理论的分类方法, 以其良好的泛化能力和鲁棒性被广泛应用于各个领域[14, 15]。LS-SVM与SVM相似, 主要是通过构造一个分隔超平面来区分两个类别。首先, 令分类函数为:
若
超平面
由于
在求最大间隔超平面时, 目标函数为:
由于
在实际的分类问题中, 允许点有一定的偏离, 因此加入了松弛变量
则式(6)将修改为:
构造拉格朗日函数:
式中:
LS-SVM方法通过求解线性方程组实现最终的决策函数, 在一定程度上降低了求解难度, 提高了求解速度, 使之更能适应于一般的实际应用。但将分类问题转化为一组线性方程组求解, 使Lagrange乘子与误差项成比例关系, 直接的后果使最终决策函数与所有样本都相关。每个样本的质量都对分类结果产生一定影响, 为提升分类的质量, 提出了改进的最小二乘支持向量机, 改进方法通过只让相关数据参与训练提升分类的准确率。
为了让更相关的数据参与模型训练, 首先需要找到数据间的相关性。车辆的行驶状态与时间和空间密切相关, 因此认为同一时间或空间内的行驶数据在怠速停车时长上具有相似性。为验证车辆怠速时间与所在时间和空间相关, 对沈阳市行驶数据的停车时间分布和短时怠速分布进行了统计, 实验路线图如图1所示, 怠速分布情况如表1所示。
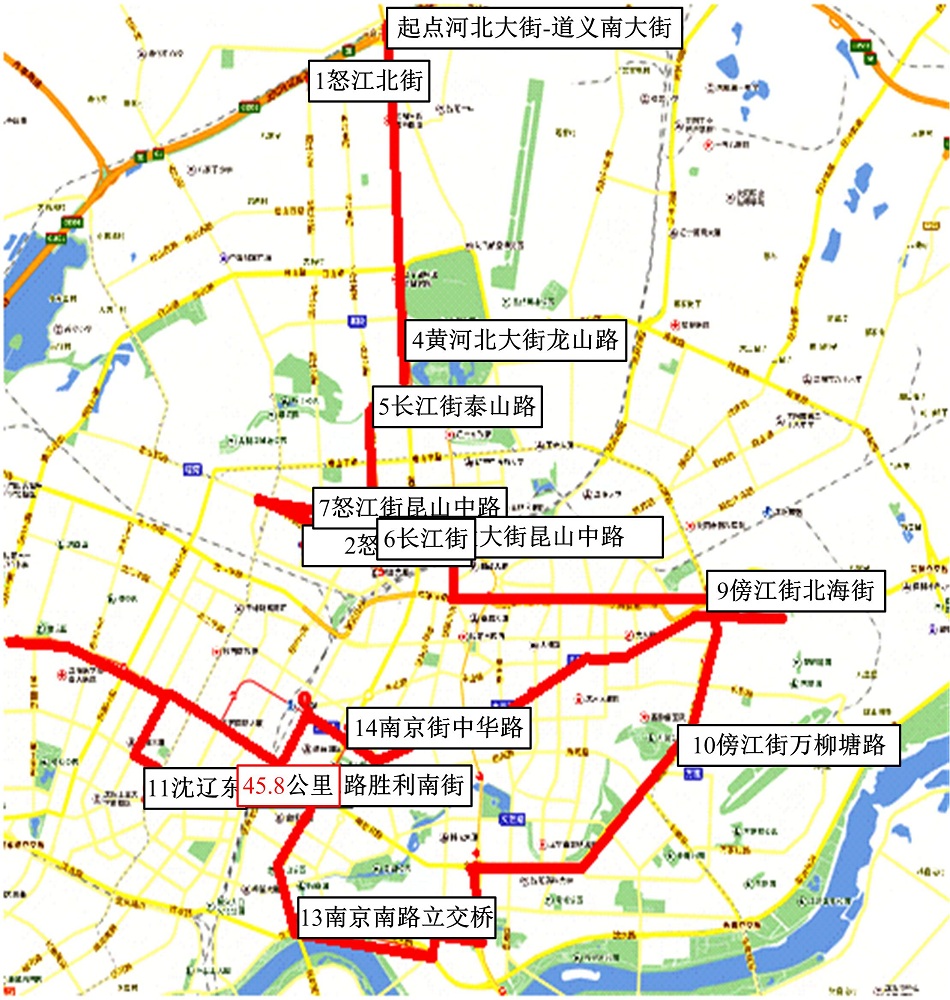 | 图1 实验路线图Fig.1 Experimental route map |
| 表1 不同时段的怠速分布情况 Table 1 Idling distribution in different periods % |
从表1可以发现, 工作日和休息日的停车分布有明显的不同。工作日中, 由于上下班高峰期的影响6:00~8:00和16:00~18:00的停车时间分布明显多于其他时间段。而在休息日中, 由于大家的出行时间比较分散, 各时间段的停车时间的分布比较平均。可见, 停车时间的分布与是否为工作日, 以及所处时间段密切相关。当怠速时间小于某个阈值时, 关闭发动机会产生比怠速更多的燃油消耗, 因此将小于阈值时间的怠速停车定义为短时怠速停车, 否则为长时怠速停车。在不同时段的怠速停车中, 工作日短时怠速停车的比例均在40%以上, 尤其11:00~13:00时段, 接近70%; 休息日大部分时段短时怠速分布相对比较平均, 均接近50%。对于短时怠速分布而言, 一天之中不同时段的规律性并不明显, 但工作日和休息日的分布有着明显不同。从表1可以看出, 车辆的怠速工况与时间段相关。
为讨论车辆的怠速工况与空间的关系, 也就是与地点的关系, 对沈阳市不同地点的怠速数据进行采样分析, 怠速分布情况和短时怠速分布情况如表2所示。根据对怠速时间分析可知, 同一时段不同地点的怠速时间分布和短时怠速分布也可能不同。在早高峰时段, 怒江街的停车分布和短时怠速分布明显少于三好街, 在晚高峰时段则恰好相反。这说明受交通潮汐现象影响, 即使在同一时段, 不同道路地点的怠速情况也有所不同, 因此车辆的怠速工况不仅与时间密切相关, 也与所在空间密切相关。
| 表2 不同地点的怠速分布情况 Table 2 Idling distribution in different locations % |
由于怠速分布与时间空间信息密切相关, 因此提出了基于时空学习的最小二乘支持向量机。通过时间和空间信息获取时空相关训练子集, 并在训练子集中训练模型, 并用该模型进行预测。将每天划分为如表1中所示的6个时段, 并按照休息日与工作日分开, 在同一时段内的数据被视为时间相关数据。空间相关数据通过距离来进行判断, 距离根据经纬度数据进行计算。
式中:
距离在阈值范围内则认为空间相关, 文中所采用的阈值为100 m。通过时间和距离获得时空相关训练子集作为训练集导入最小二乘支持向量机进行模型训练, 然后进行预测。
怠速时长的预测是为了有效地减少无效起停。怠速时间长度小于阈值
式中:
在评价怠速时长预测方法是否准确时, 使用查准率
在沈阳市共6138条怠速数据上进行预测, 训练数据与测试数据比例约为10: 1, 在测试数据上的怠速预测结果如表3所示。
| 表3 怠速时长预测分类结果 Table 3 Classification results of idling time predicts |
如表3所示, 改进的LS-SVM的
使用沈阳市道路的实际行驶数据进行仿真实验, 即在实际行驶工况下, 根据怠速时间预测的结果确定是否关闭发动机, 计算燃油消耗。实验车辆参数如下:车辆质量为1620 kg; 排量为1.6 L; 怠速油耗为0.35 mL/s; 起动油耗为3.22 mL。使用德国GREGORY技术公司的S8005C油耗仪对实验车辆进行测量, 反复测量10次, 测得平均怠速油耗为0.35 mL/s; 反复起动10次发动机测量起动油耗, 每次关闭发动机后隔20 s左右再次起动发动机, 得到发动机起动平均油耗为3.22 mL。在高峰期和平峰期, 对使用怠速预测方法前后的起停情况进行分析, 如表4所示。
式中:节约油耗
| 表4 起停系统节油分析 Table 4 Fuel saving analysis of start-stop system |
百公里节约油耗为:
车辆在高峰期时百公里油耗以12 L计算, 节油2%左右, 减少无效起停占总起停次数的50%以上; 平峰期百公里油耗以9 L计算, 节油0.2%左右, 减少无效起停占总起停次数的15%以上。运用怠速预测方法进行控制, 能有效减少无效起停的次数, 节约更多油耗, 尤其在交通高峰期, 由于短时怠速情况增多, 节油效果更明显, 能减少更多的无效起停, 提升驾驶的舒适性。
在怠速时间过短时, 起停系统关闭起动发动机会比保持怠速产生更多的燃油消耗, 不能实现应有的节油效果。针对这一问题提出了基于时空学习的最小二乘支持向量机怠速预测方法, 通过速度时间序列数据的时间和空间相关性缩小训练样本, 去除不相关样本, 提升预测的效率和准确率。实验表明, 基于时空学习的LS-SVM查准率达到86.5%, 优于传统的LS-SVM和单独基于时间学习的LS-SVM。将怠速预测方法应用于起停控制, 节油效率在高峰期时为2%左右; 同时有效地减少了短时怠速关闭起动发动机的次数, 在高峰期减少50%以上的起停, 提升了驾驶舒适性。在目前的研究中仅考虑了减少无效起停次数来节约油耗, 还没有考虑起停系统工作过程中蓄电池充放电引起的燃油消耗, 将在未来的研究中进一步分析。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|