吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (9): 3056-3068.doi: 10.13229/j.cnki.jdxbgxb.20250574
• 通信与控制工程 • 上一篇
基于数据驱动的车辆编队分布式预测控制
于树友1( ),刘泽澎1,林宝君1(),陈虹1,2
),刘泽澎1,林宝君1(),陈虹1,2
- 1.吉林大学 通信工程学院,长春 130022
2.同济大学 电子与信息工程学院,上海 200092
Data⁃driven distributed predictive control of vehicle platoons
Shu-you YU1(),Ze-peng LIU1,Bao-jun LIN1(),Hong CHEN1,2
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.College of Electronics and Information Engineering,Tongji University,Shanghai 200092,China
摘要:
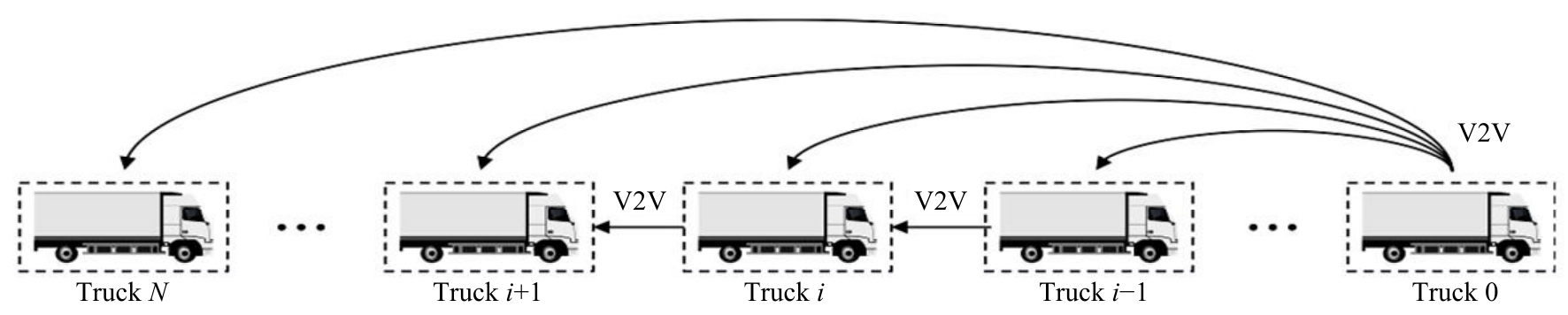
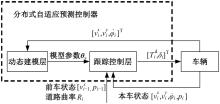
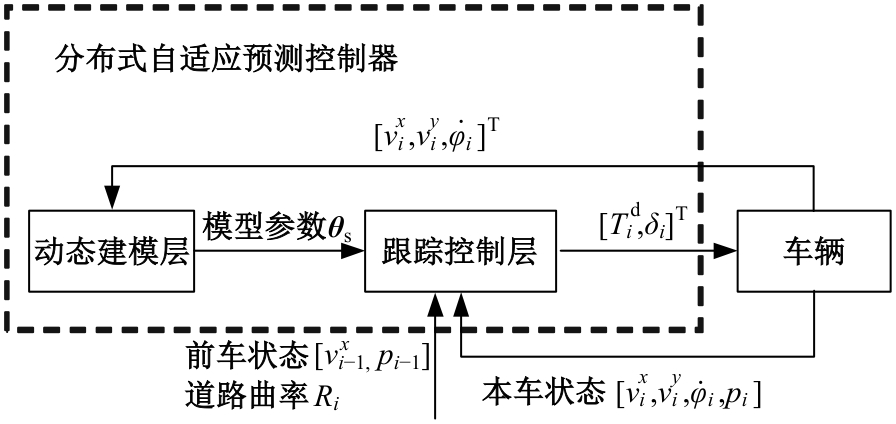
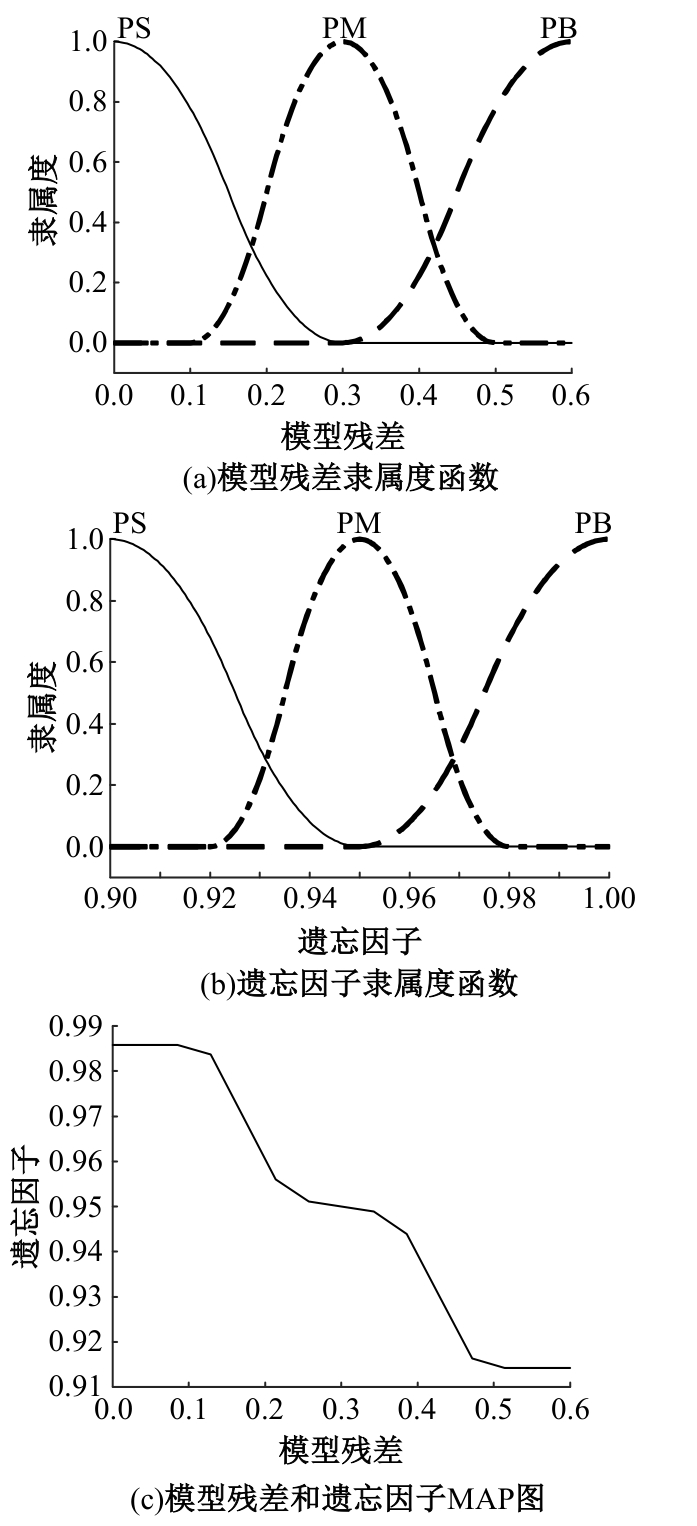
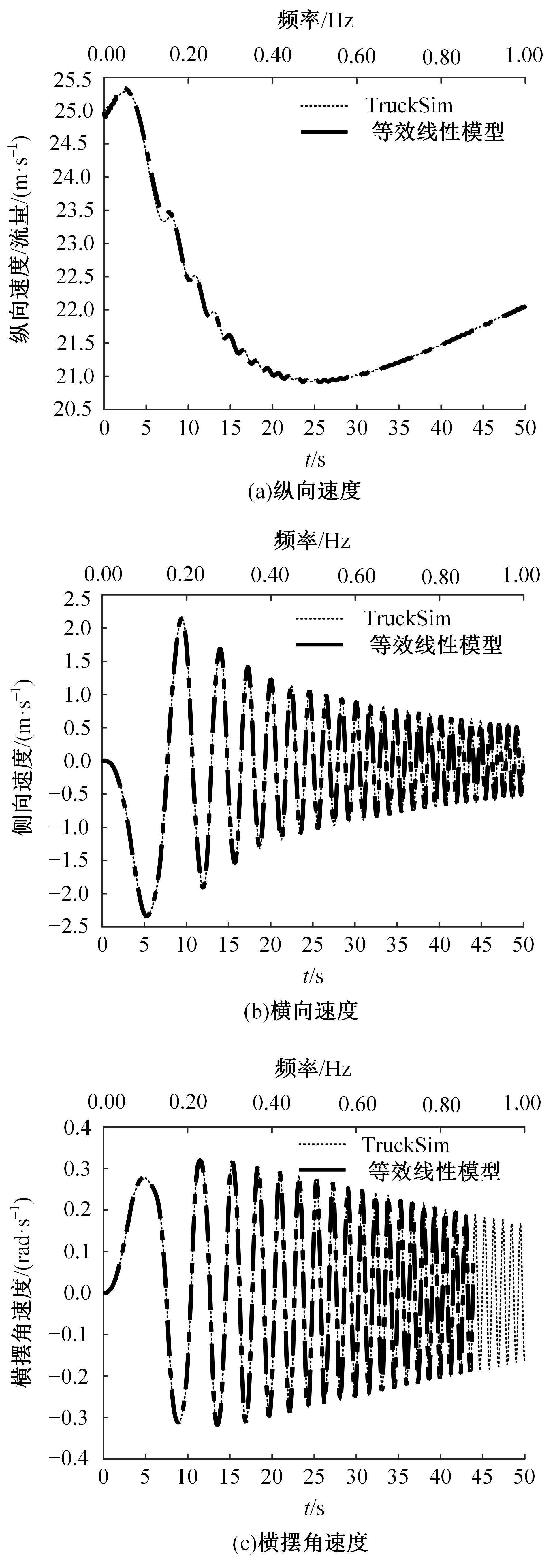
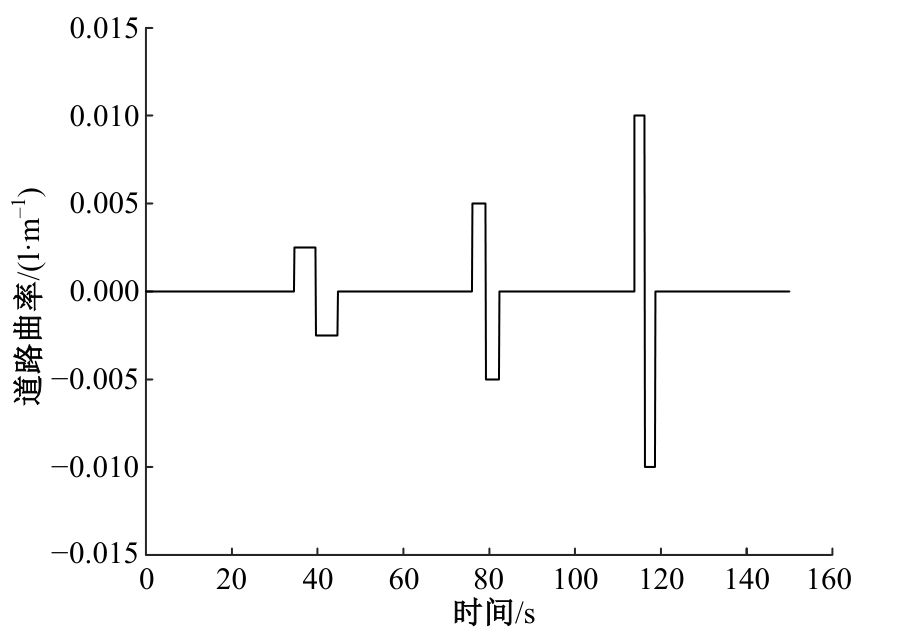
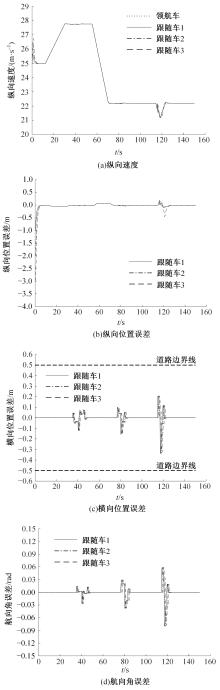
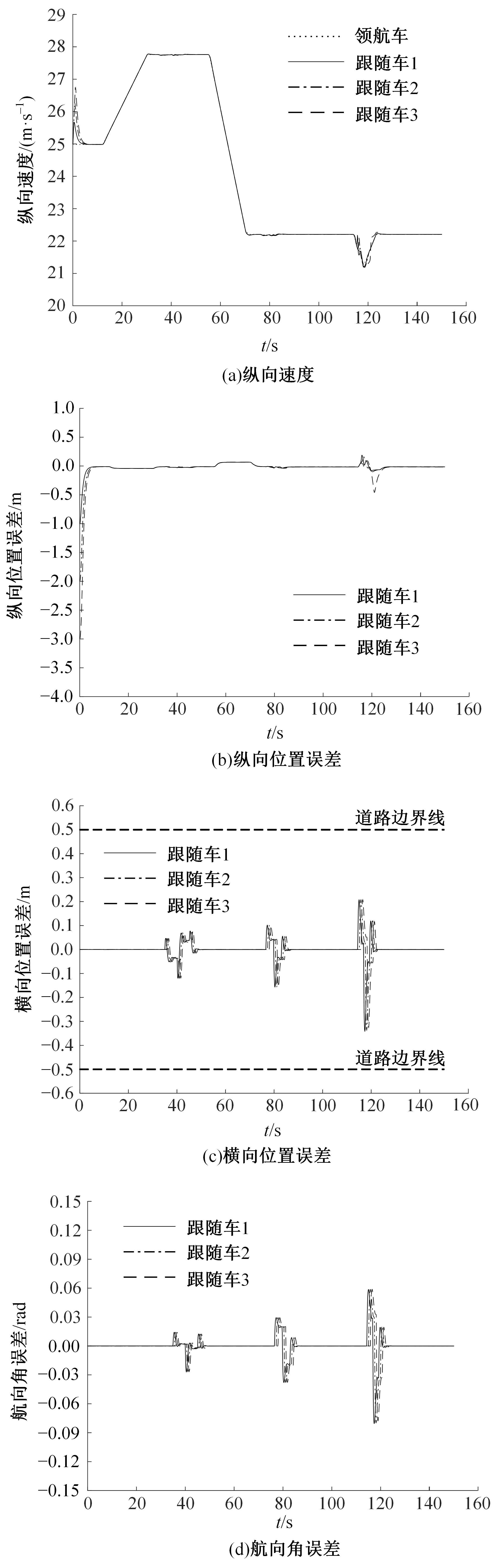
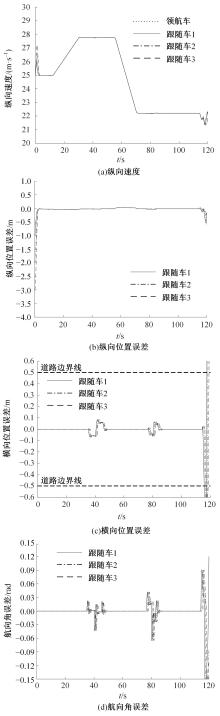
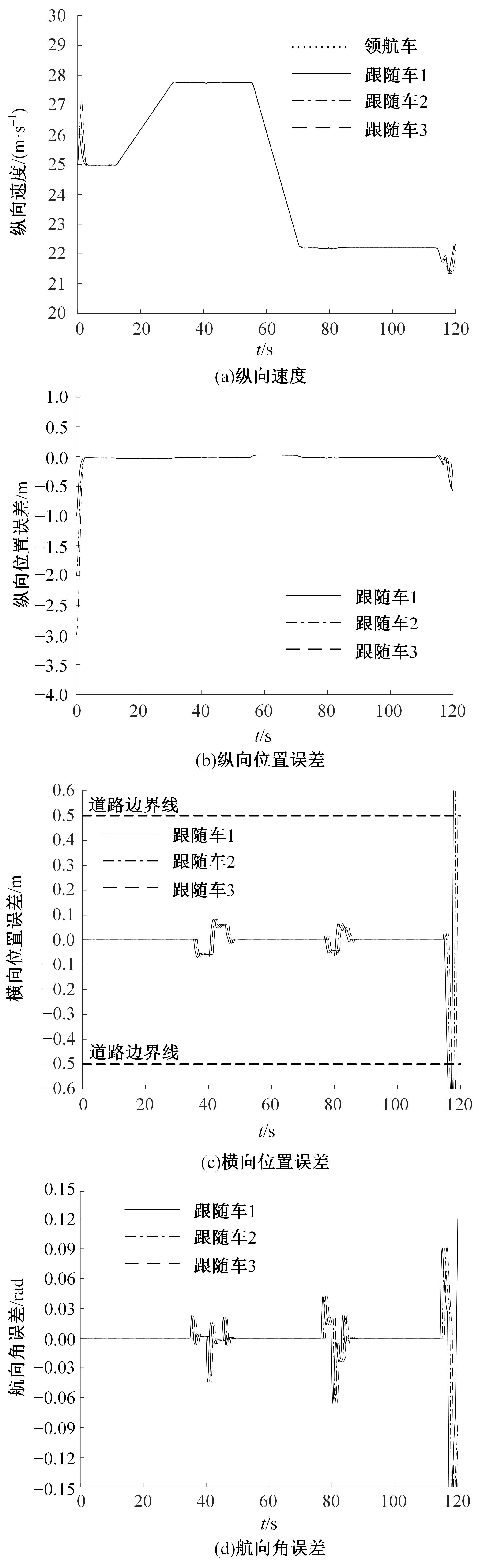
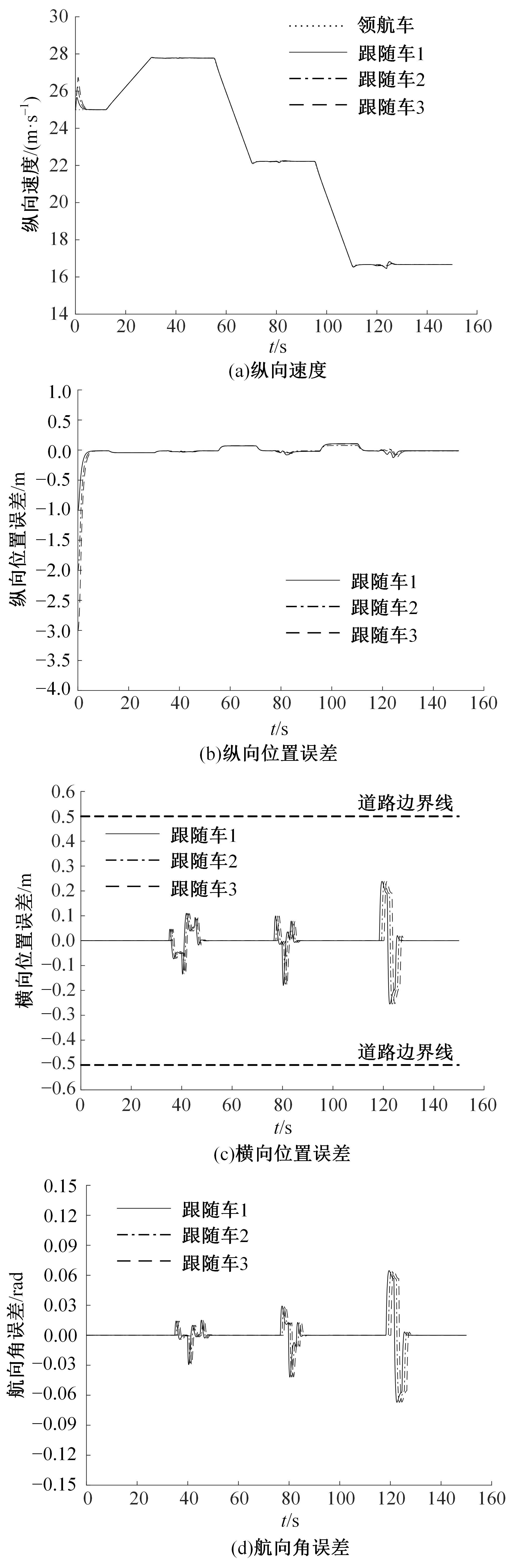
提出了一种在线数据驱动预测控制方法,在闭环系统运行的各个离散时间点构建被控对象的等效线性模型,并设计了一种基于参数辨识残差动态调整遗忘因子的递推最小二乘算法,用于在线估计模型的时变参数。此外,还提出了一种基于前车-领航车-跟随通信拓扑的分布式预测控制策略,将车队的全局优化问题转化为每辆跟随车的局部优化问题,使所有跟随车能够并行求解各自的优化问题,提高了求解效率。TruckSim与Matlab/Simulink的联合仿真结果表明:本文所构建的数据驱动模型能够准确捕捉时变环境下的车辆动态特性,所设计的分布式预测控制器能够有效保证车队的纵向跟踪性能和横向车道保持性能。
中图分类号:
- TP273

| [1] | Chen T, Cai Y, Chen L, et al. Trajectory and velocity planning method of emergency rescue vehicle based on segmented three-dimensional quartic Bezier curve[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 24(3): 3461-3475. |
| [2] | 张文会, 叶梅茹, 席聪, 等. 混合交通流环境下车辆编队与碳排放特性[J/OL]. [2025-09-04]. |
| [3] | Qiang Z, Dai L, Chen B, et al. Distributed model predictive control for heterogeneous vehicle platoon with inter-vehicular spacing constraints[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 24(3): 3339-3351. |
| [4] | Wang R, Li H, Liang B, et al. Policy learning for nonlinear model predictive control with application to USVs[J]. IEEE Transactions on Industrial Electronics, 2023, 71(4): 4089-4097. |
| [5] | 冯阳阳. 智能网联环境下商用车队列分布式模型预测控制策略[D]. 长春:吉林大学控制科学与工程学院, 2024. |
| Feng Yang-yang. Distributed model predictive control of truck platoons under intelligent networked environment[D]. Changchun: College of Control Science and Engineering, Jilin University, 2024. | |
| [6] | 丁能根, 李丹华, 许景, 等. 基于局部线性化的汽车质心侧偏角估计[J].农业机械学报, 2012, 43(1): 6-11. |
| Ding Neng-gen, Li Dan-hua, Xu Jing, et al. Estimation of vehicle sideslip angle based on local linearization[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(1): 6-11. | |
| [7] | Quan S, Wang Y X, Xiao X, et al. Feedback linearization-based MIMO model predictive control with defined pseudo-reference for hydrogen regulation of automotive fuel cells[J]. Applied Energy, 2021, 293: No. 116919. |
| [8] | Vicente B A H, James S S, Anderson S R. Linear system identification versus physical modeling of lateral-longitudinal vehicle dynamics[J]. IEEE Transactions on Control Systems Technology, 2020, 29(3): 1380-1387. |
| [9] | Aswani A, Gonzalez H, Sastry S S, et al. Provably safe and robust learning-based model predictive control[J]. Automatica, 2013, 49(5): 1216-1226. |
| [10] | Zhan J, Ma Z, Zhang L. Data-driven modeling and distributed predictive control of mixed vehicle platoons[J]. IEEE Transactions on Intelligent Vehicles, 2022, 8(1): 572-582. |
| [11] | Spielberg N A, Brown M, Kapania N R, et al. Neural network vehicle models for high-performance automated driving[J]. Science Robotics, 2019, 4(28):No. eaaw1975. |
| [12] | 耿科. 基于数据驱动的智能车辆非线性车辆动力学建模方法研究[D]. 北京: 北京交通大学电子信息工程学院, 2023. |
| Geng Ke. A data-driven approach to modeling nonlinear vehicle dynamics for intelligent vehicles[D]. Beijing: School of Electronic and Information Engineering, Beijing Jiaotong University, 2023. | |
| [13] | Breschi V, Sassella A, Formentin S. On the design of regularized explicit predictive controllers from input-output data[J]. IEEE Transactions on Automatic Control, 2022, 68(8): 4977-4983. |
| [14] | Coulson J, Lygeros J, Dörfler F. Data-enabled predictive control: in the shallows of the DeePC[C]∥ 18th European Control Conference (ECC), Naples, Italy, 2019: 307-312. |
| [15] | Xiao Y, Zhang X, Xu X, et al. Deep neural networks with Koopman operators for modeling and control of autonomous vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2022, 8(1): 135-146. |
| [16] | Rajamani R. Vehicle Dynamics and Control[M].Heidelberg: Springer Science & Business Media, 2011. |
| [17] | Ding F, Chen T. Hierarchical gradient-based identification of multivariable discrete-time systems[J]. Automatica, 2005, 41(2): 315-325. |
| [18] | Swaroop D, Hedrick J K. Constant spacing strategies for platooning in automated highway systems[J]. Journal of Dynamic Systems, Measurement, and Control,1999,121(3):462-470. |
| [19] | Deng C Y. A generalization of the Sherman-Morrison-Woodbury formula[J]. Applied Mathematics Letters, 2011, 24(9): 1561-1564. |
| [20] | Fortescue T R, Kershenbaum L S, Ydstie B E. Implementation of self-tuning regulators with variable forgetting factors[J]. Automatica, 1981, 17(6): 831-835. |
| [21] | Kim M, Kim K, Han S. Reliable online parameter identification of li-ion batteries in battery management systems using the condition number of the error covariance matrix[J]. IEEE Access, 2020, 8: 189106-189114. |
| [22] | Zhu S, He Y. Articulated heavy vehicle lateral dynamic analysis using an automated frequency response measuring technique[J]. International Journal of Vehicle Performance, 2015, 2(1): 30-57. |
| [23] | 李文博, 谢华城, 于树友, 等. 基于分布式模型预测的商用车队列避障控制[J/OL]. [2025-09-04]. |
| [24] | Hichri Y, Cerezo V, Do M T. Friction on road surfaces contaminated by fine particles: some new experimental evidences[J]. Proceedings of the Institution of Mechanical Engineers, Part J: Journal of Engineering Tribology, 2017, 231(9): 1209-1225. |
| [1] | 于树友,谢华城,李文博,李永福,陈虹,林宝君. 数字孪生驱动的商用车队列纵横向控制[J]. 吉林大学学报(工学版), 2025, 55(6): 1994-2002. |
| [2] | 金立生,方文平,候海晶,孙玉芹. 基于BP神经网络的车道保持控制系统[J]. 吉林大学学报(工学版), 2010, 40(03): 650-0654. |
|
||