吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (10): 3108-3118.doi: 10.13229/j.cnki.jdxbgxb.20240020
• 车辆工程·机械工程 • 上一篇
非平整路面下被动行走机器人的步态动力学演化
高建设( ),暴雨萌,赵天,丁顺良,饶晓波()
),暴雨萌,赵天,丁顺良,饶晓波()
- 郑州大学 机械与动力工程学院,郑州 450001
Evolution of gait dynamics of passive walking robot on rough terrain
Jian-she GAO(),Yu-meng BAO,Tian ZHAO,Shun-liang DING,Xiao-bo RAO()
- School of Mechanical and Power Engineering,Zhengzhou University,Zhengzhou 450001,China
摘要:
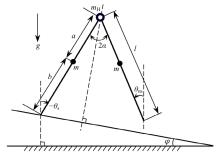
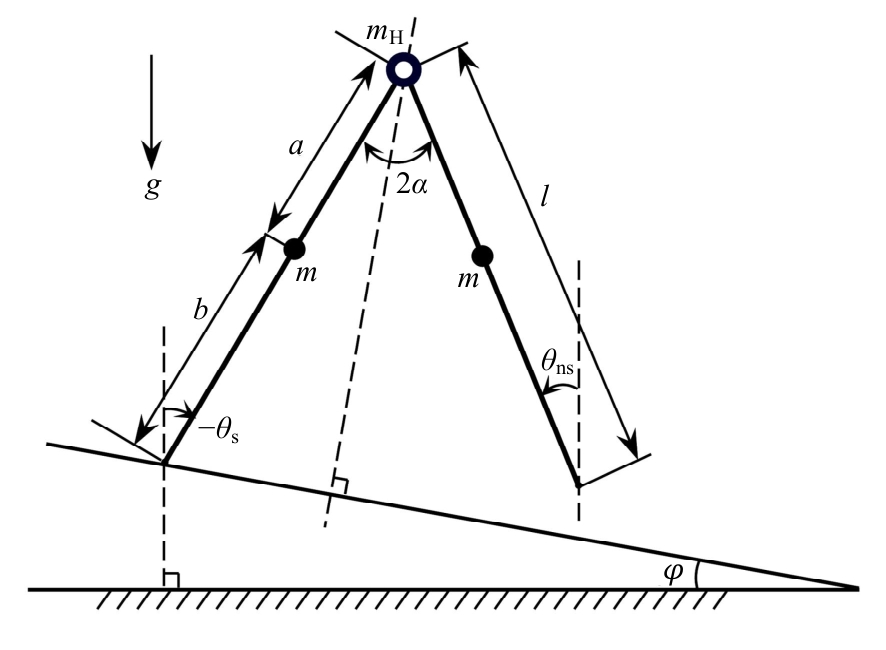
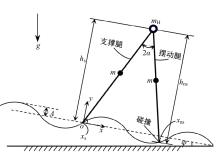
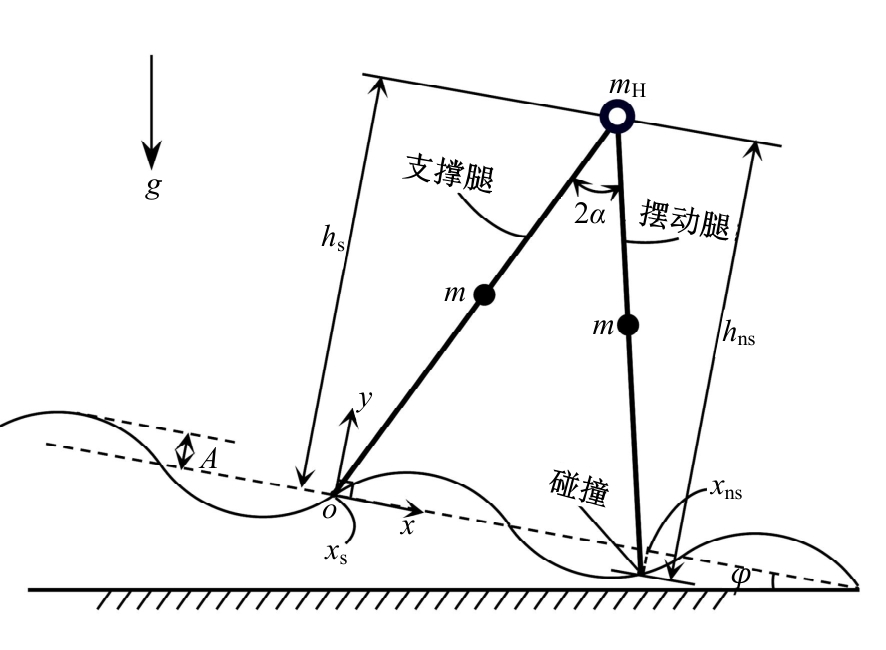
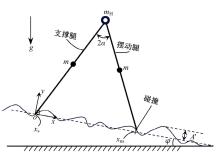
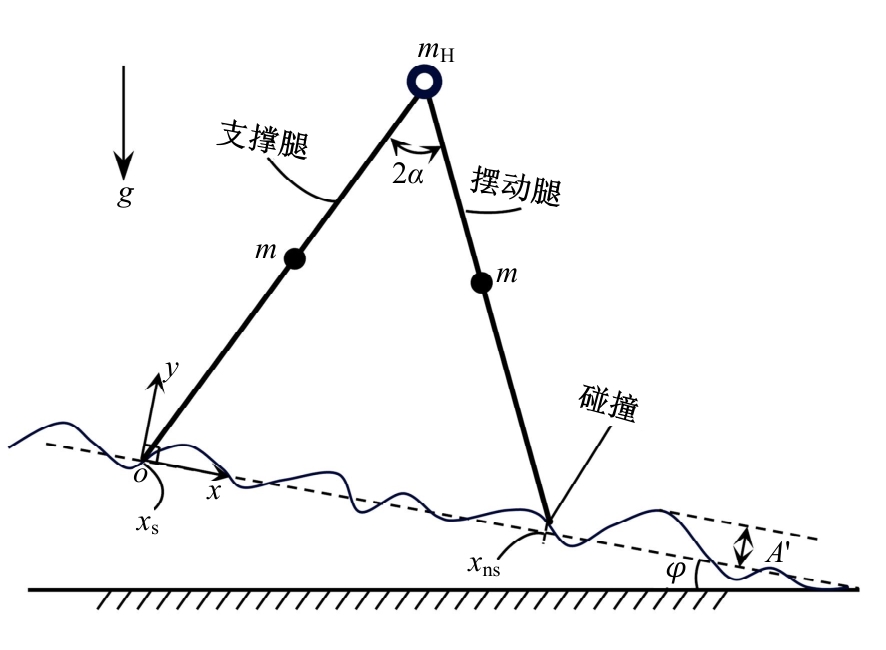
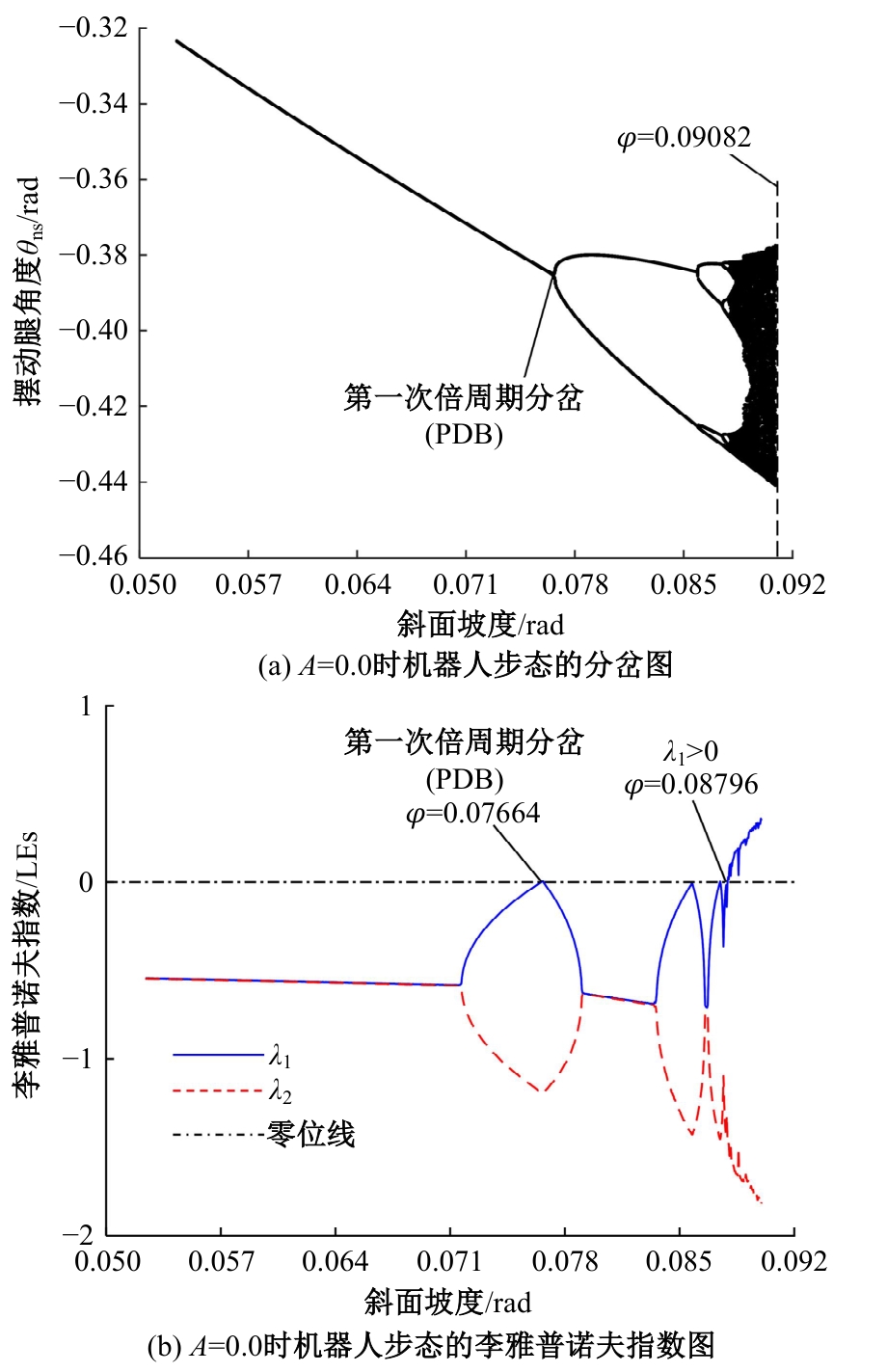
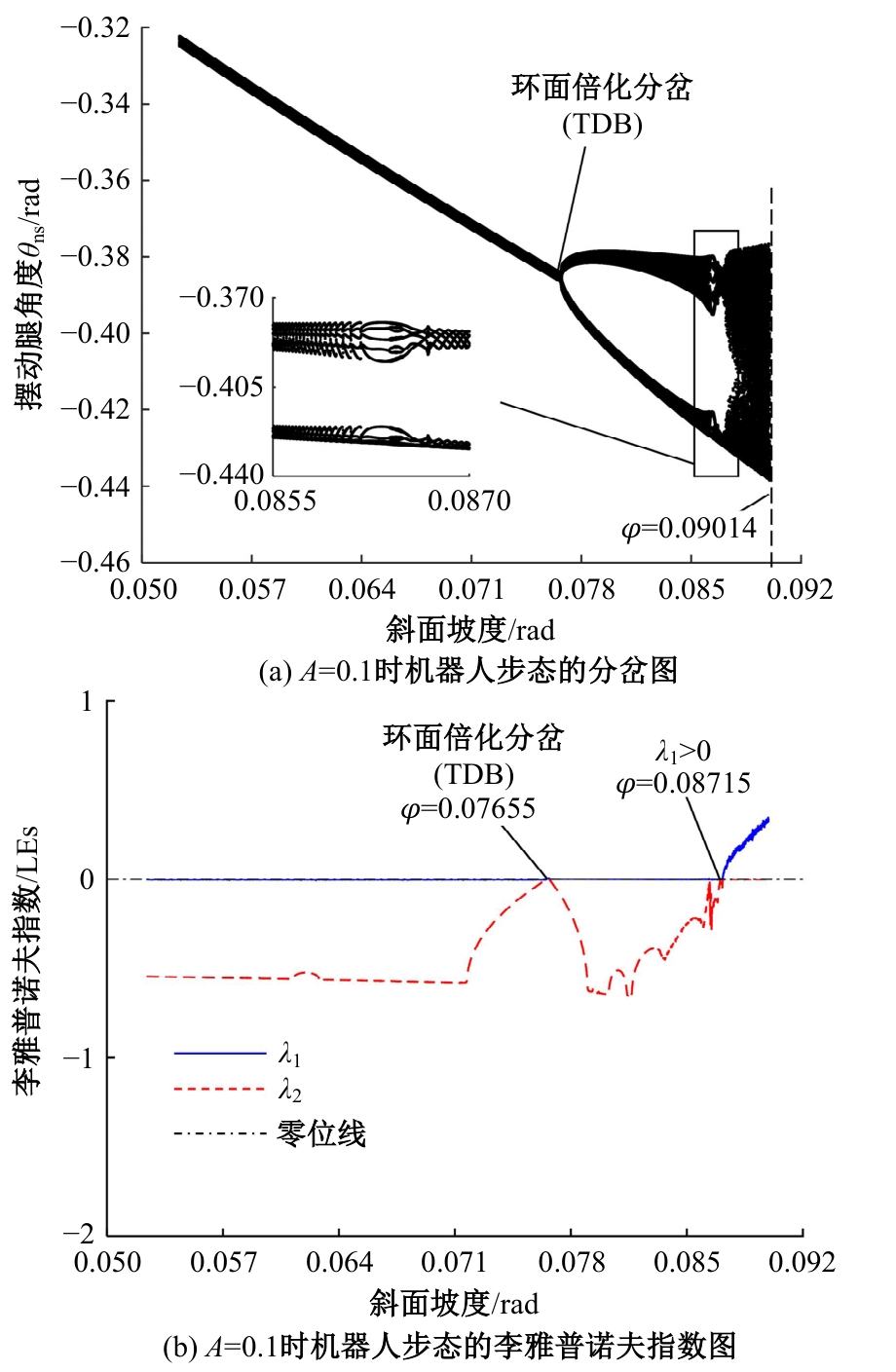
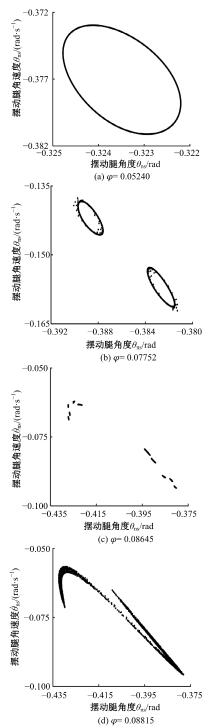
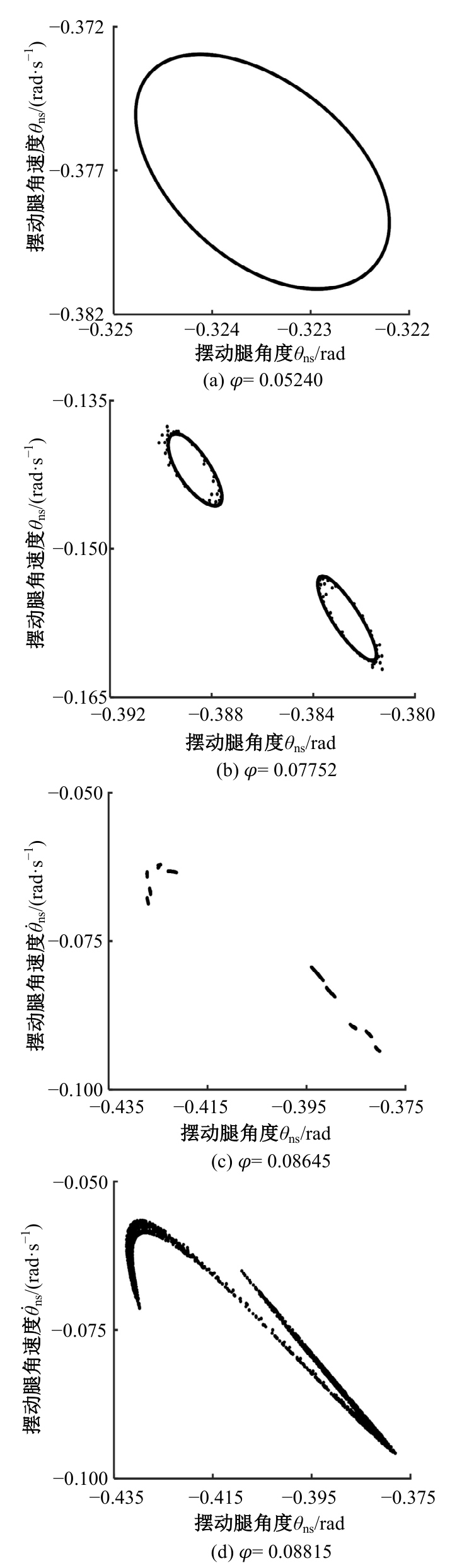
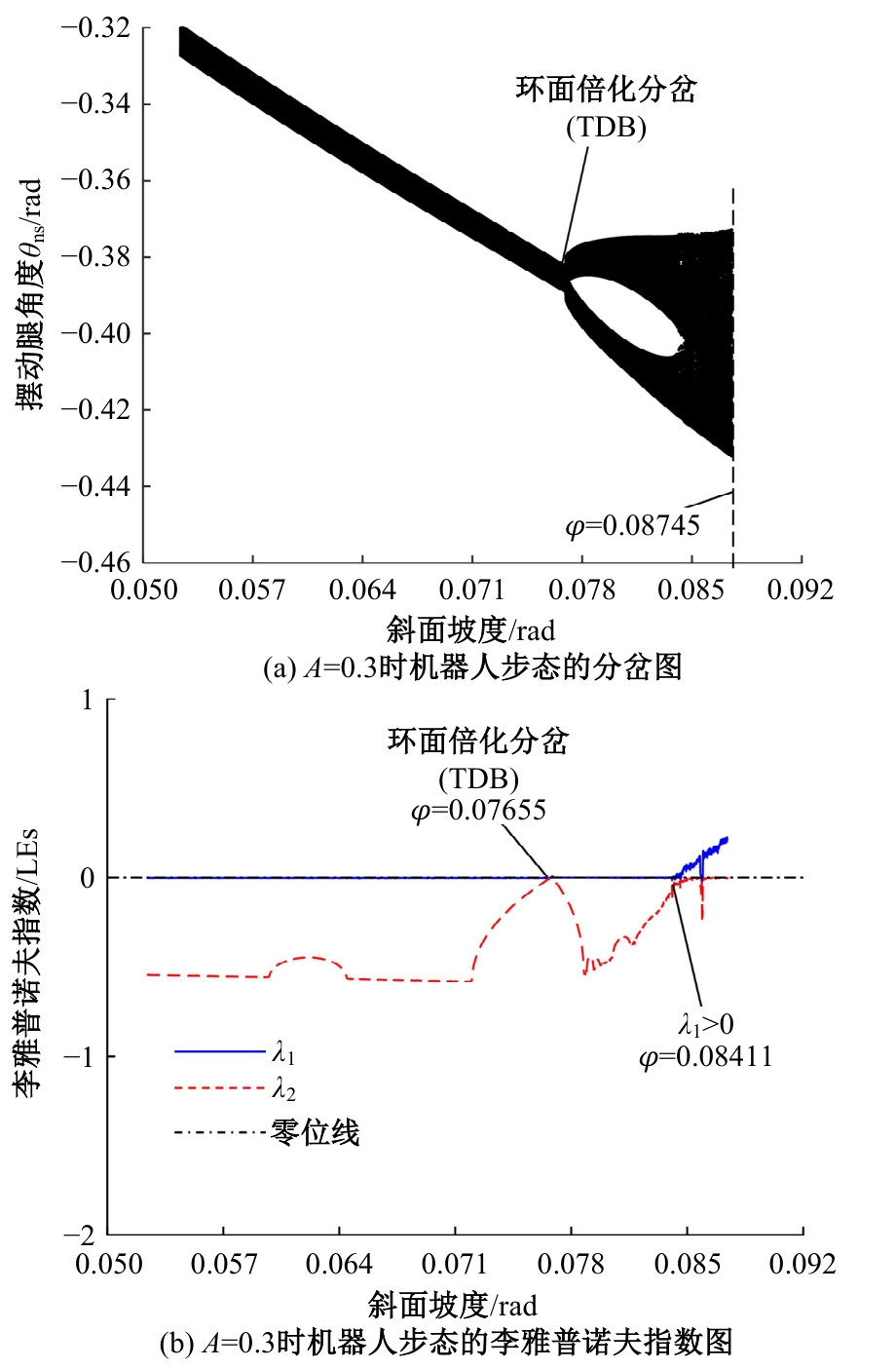
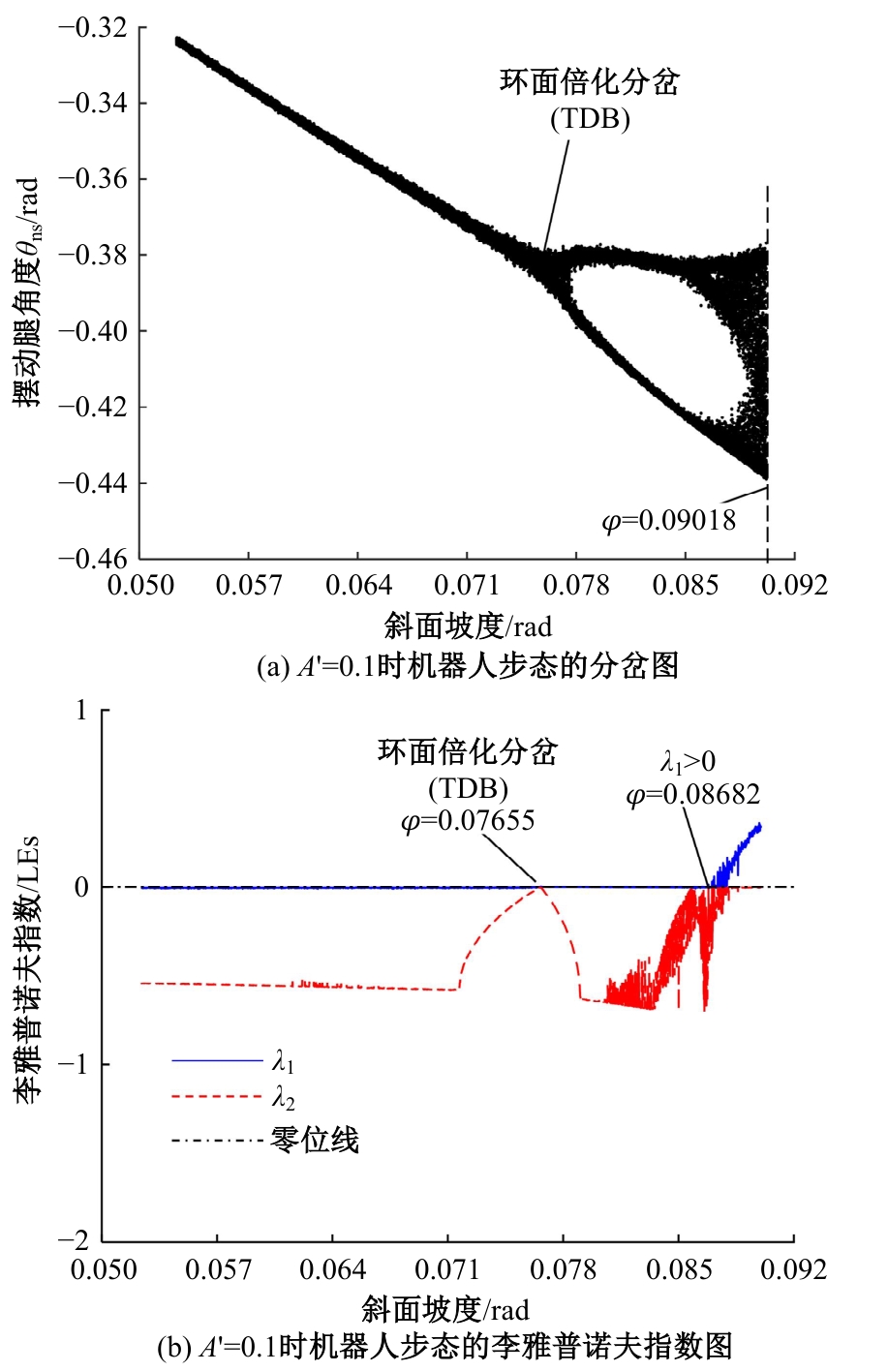
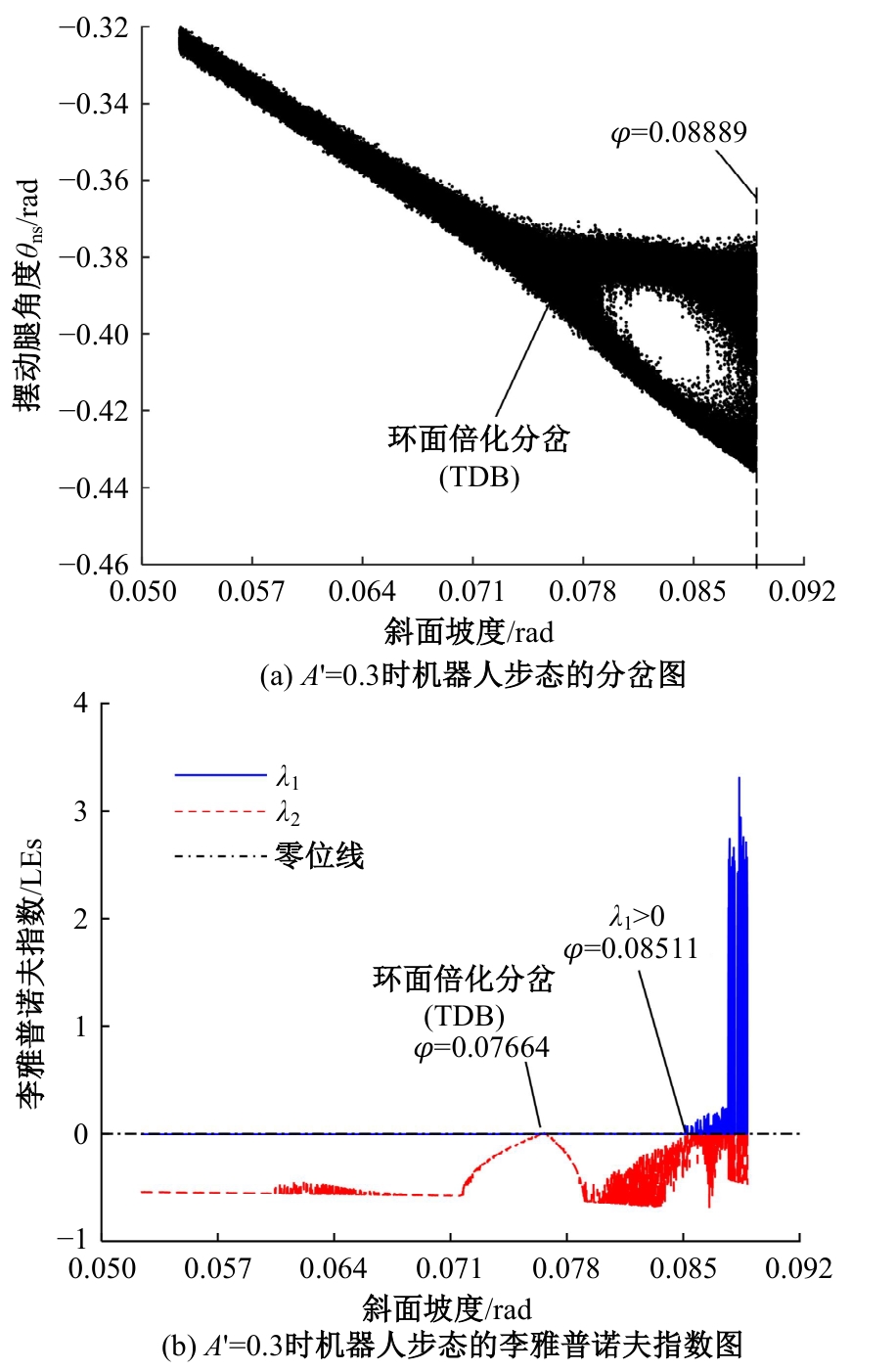
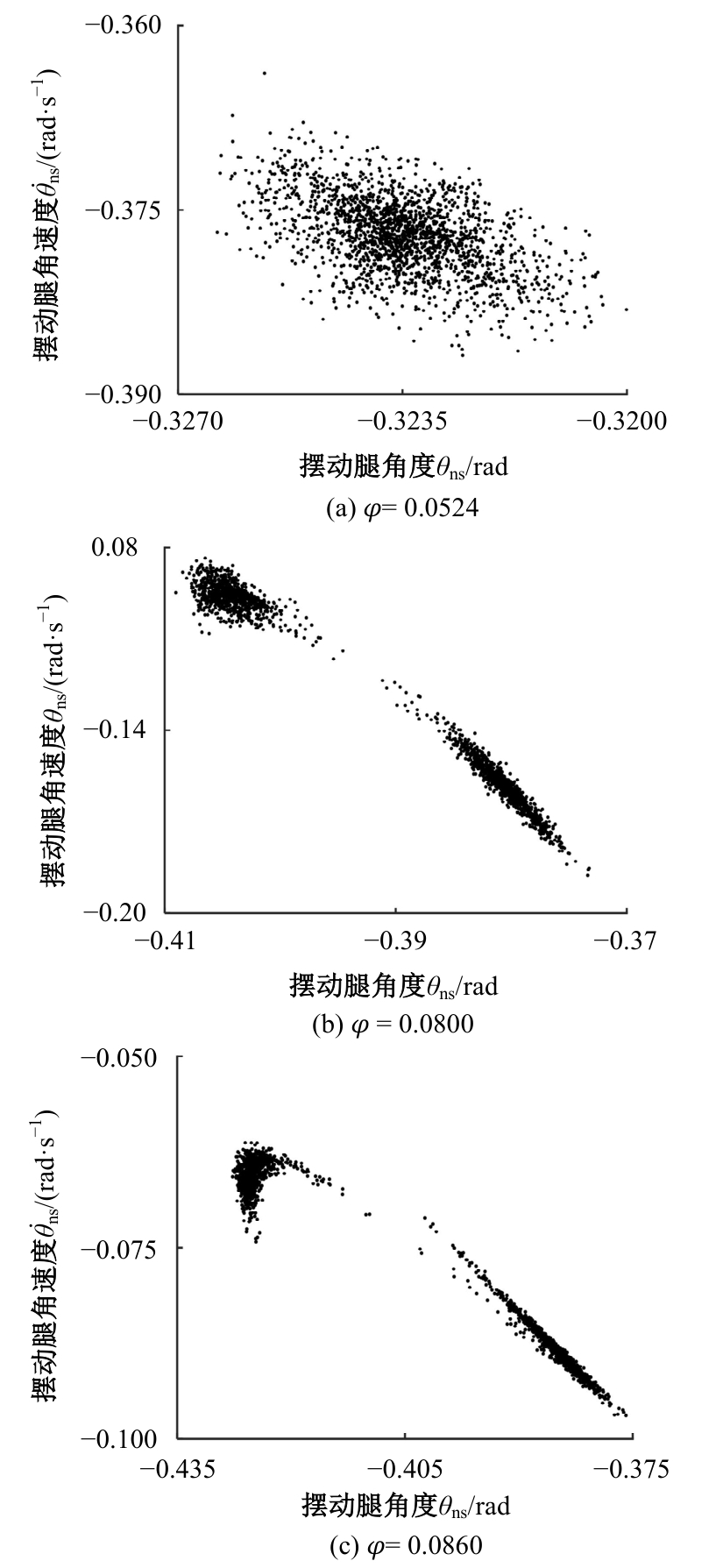
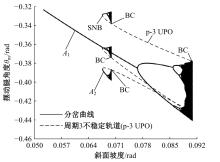
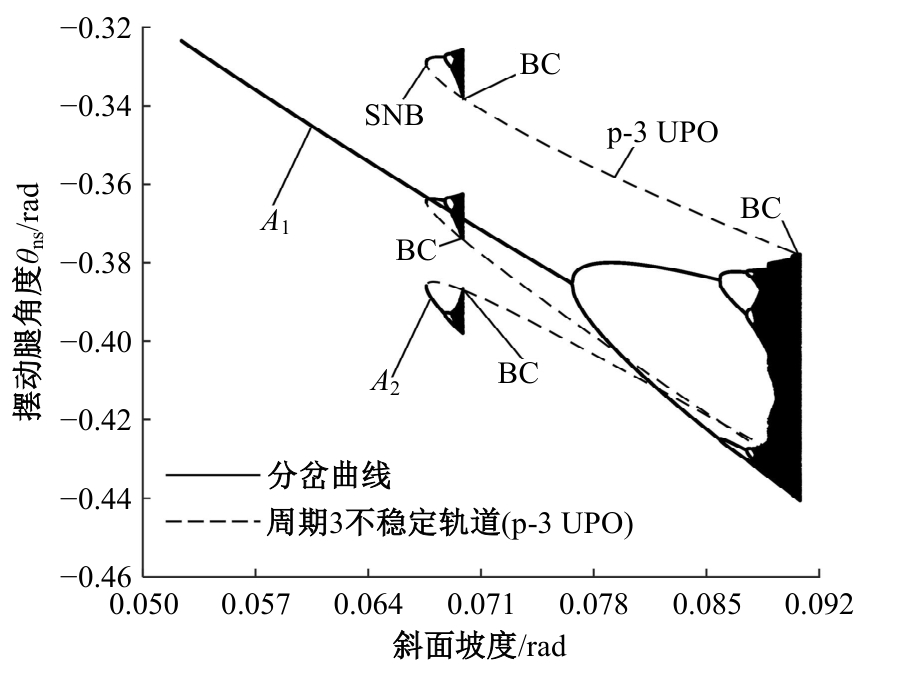
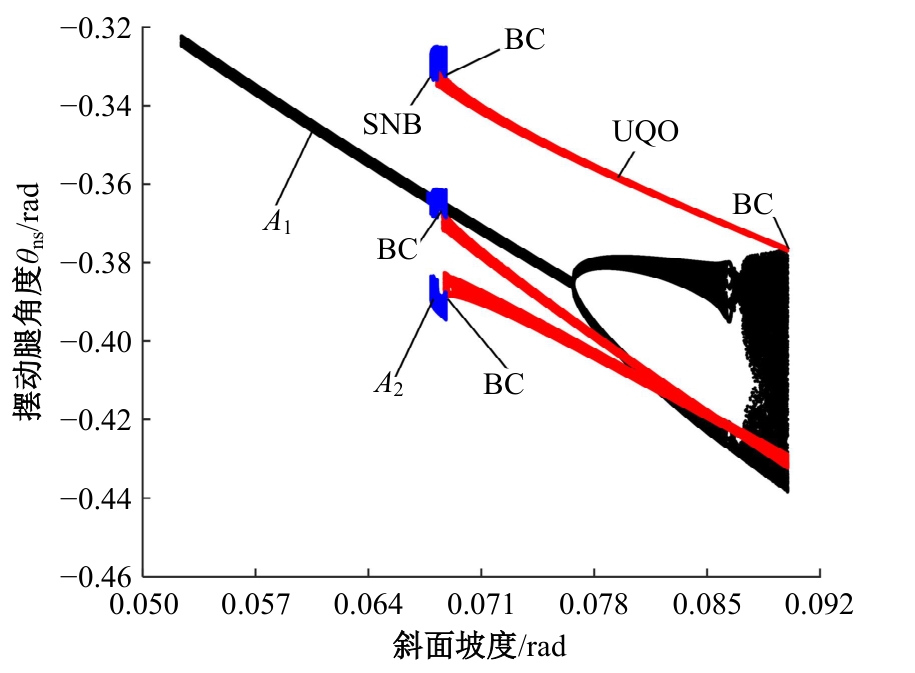
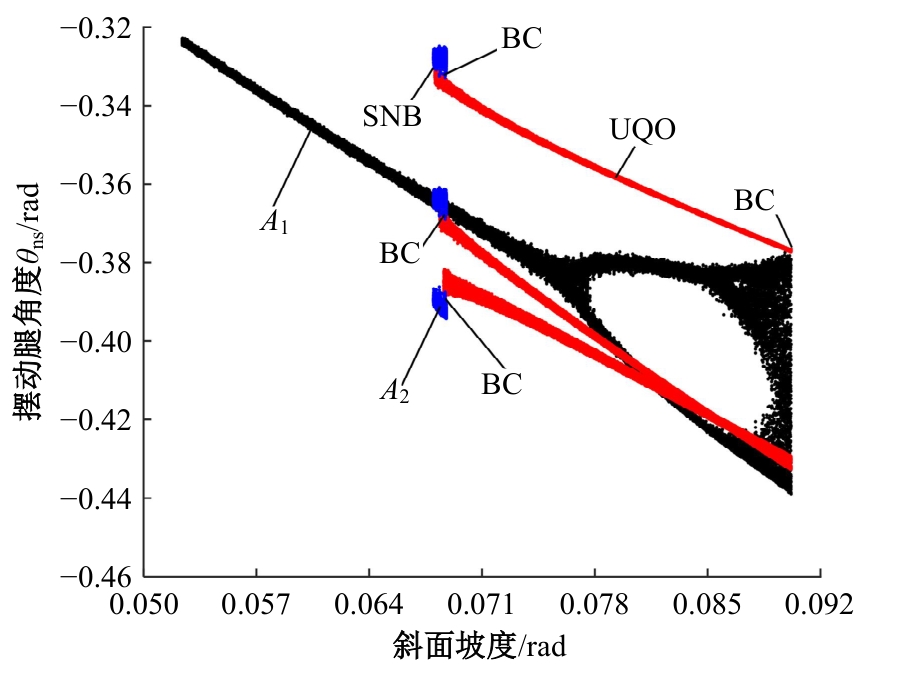
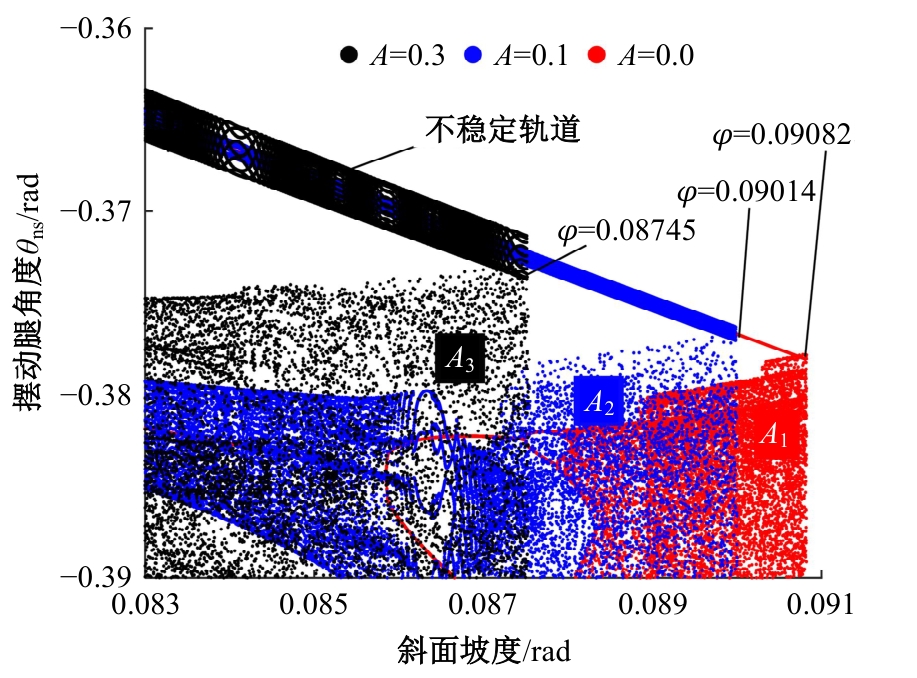
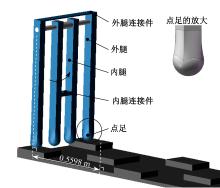
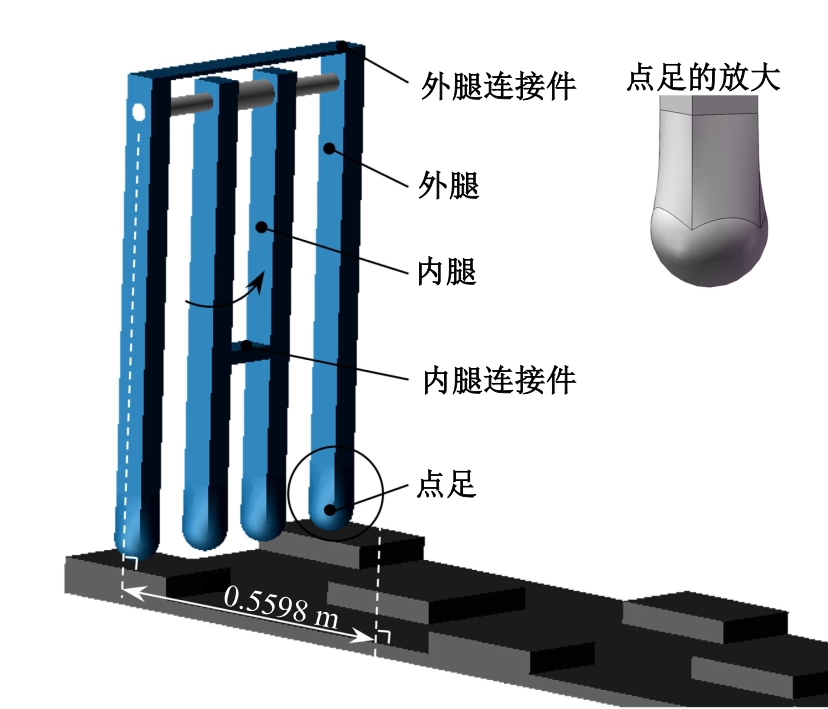
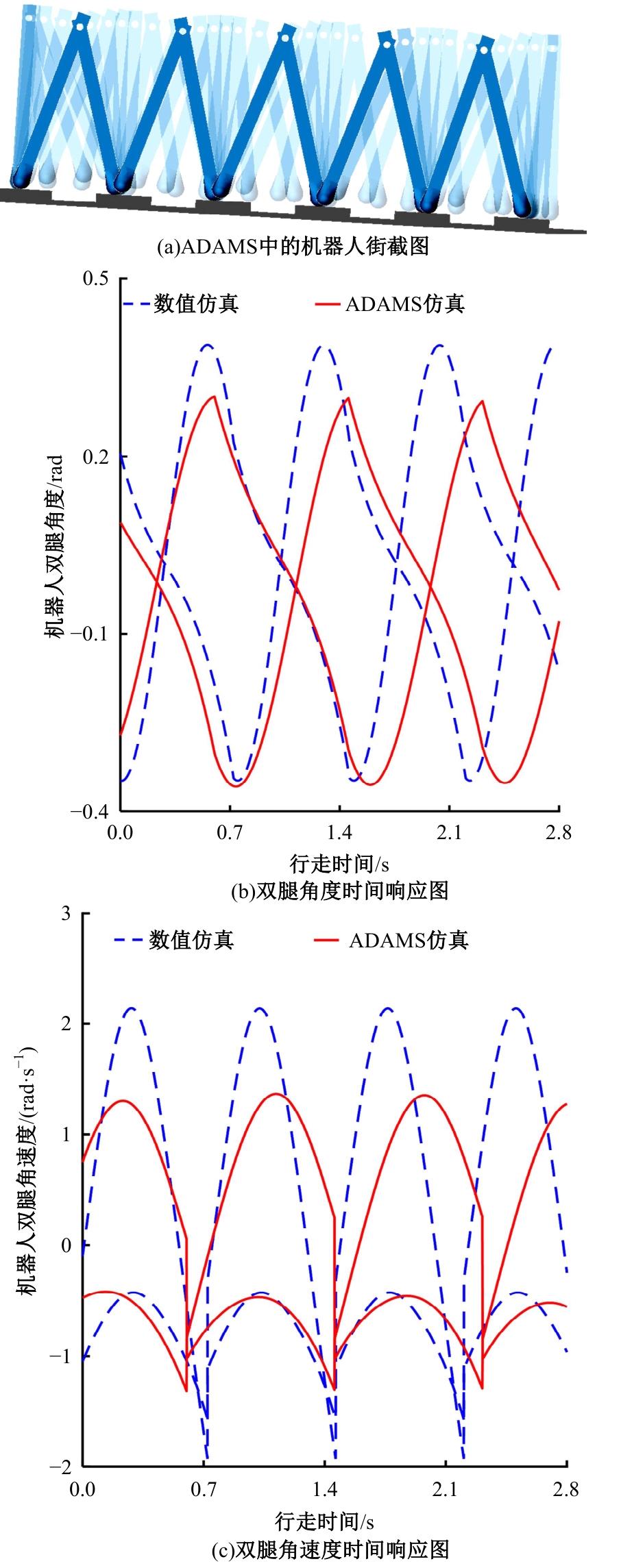
为了探索非平整路面环境对被动行走机器人的步态演化影响,采用正弦函数模型刻画路面的凹凸特性,并通过引入随机变化的路面幅度和频率来模拟真实行走环境下道路的起伏状态。通过运用分岔图和李雅普诺夫指数等数值分析工具,对比不同路面不平度对机器人步态稳定性的影响,并深入探讨全局分岔中的边界激变事件引发的机器人跌倒行为。此外,搭建机器人样机并进行ADAMS动力学仿真,验证了模型的行走能力。研究表明,在正弦波形的非平整路面上,机器人的步态为拟周期运动,并随系统参数的改变经环面倍化分岔逐渐演变为混沌;而在随机非平整路面上,路面对机器人步态的激励效应导致其偏离极限环轨迹,系统的稳定性下降;在上述行走环境中,产生于鞍结分岔的不稳定轨道引发的双边界激变事件是步态吸引子最终消失的重要原因。
中图分类号:
- TP242





| [1] | Moon J S, Lee M, Bae J, et al. Analysis of period-1 passive limit cycles for flexible walking of a biped with knees and point feet[J]. Robotica, 2016, 34(11): 2486-2498. |
| [2] | Znegui W, Gritli H, Belghith S. A new Poincaré map for investigating the complex walking behavior of the compass-gait biped robot[J]. Applied Mathematical Modelling, 2021, 94: 534-557. |
| [3] | Wu Y, Qiao S, Yao D. A hybrid chaotic controller integrating hip stiffness modulation and reinforcement learning-based torque control to stabilize passive dynamic walking[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2023, 237(3): 673-691. |
| [4] | Mcgeer T. Passive dynamic walking[J]. The International Journal of Robotics Research, 1990, 9(2): 62-82. |
| [5] | Iqbal S, Zang X, Zhu Y, et al. Bifurcations and chaos in passive dynamic walking: a review[J]. Robotics and Autonomous Systems, 2014, 62(6): 889-909. |
| [6] | 钱志辉, 周亮, 任雷, 等. 具有仿生距下关节和跖趾关节的完全被动步行机[J]. 吉林大学学报: 工学版, 2018, 48(1): 205-211. |
| Qian Zhi-hui, Zhou Liang, Ren Lei, et al. Completely passive walking machine with bionic subtalar jointand matatarsal phalangeal joint[J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(1): 205-211. | |
| [7] | 高家昌, 高建设, 陶征. 被动步行平足机器人动力学参数研究[J]. 机械传动, 2023, 46(12): 22-30. |
| Gao Jia-chang, Gao Jian-she, Tao Zheng. Research on dynamic parameters of a passive walking robot with flat feet[J]. Journal of Mechanical Transmission, 2023, 46(12): 22-30. | |
| [8] | Goswami A, Thuilot B, Espiau B. A study of the passive gait of a compass-like biped robot: symmetry and chaos[J]. International Journal of Robotics Research, 1998, 17(12): 1282-1301. |
| [9] | Garcia M, Chatterjee A, Ruina A, et al. The simplest walking model: stability, complexity, and scaling[J]. Journal of Biomechanical Engineering, 1998, 120(2): 281-288. |
| [10] | Wisse M, Schwab A L, van der Helm F C T. Passive dynamic walking model with upper body[J]. Robotica, 2004, 22(6): 681-688. |
| [11] | Narukawa T, Takahashi M, Yoshida K. Level-ground walk based on passive dynamic walking for a biped robot with torso[C]∥Proceedings 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 2007: 3224-3229. |
| [12] | 柳宁. 双足被动行走器动力学仿真与实验研究[D]. 北京:清华大学航天航空学院, 2009. |
| Liu Ning. Simulation and experimental study on the dynamics of passive bipedal walker[D]. Beijing: School of Aerospace Engineering, Tsinghua University, 2009. | |
| [13] | Kim J, Choi C H, Spong M W. Passive dynamic walking with symmetric fixed flat feet[C]∥2007 IEEE International Conference on Control and Automation, Guangzhou, China, 2007: 24-30. |
| [14] | Wu B, Zhao M. Bifurcation and chaos of a biped robot driven by coupled elastic actuation[C]∥Proceeding of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 2014: 1905-1910. |
| [15] | Safartoobi M, Dardel M, Daniali H M. Gait cycles of passive walking biped robot model with flexible legs[J]. Mechanism and Machine Theory, 2021, 159: No.104292. |
| [16] | Iida F, Tedrake R. Minimalistic control of biped walking in rough terrain[J]. Autonomous Robots, 2010, 28: 355-368. |
| [17] | Afshar P N, Ren L. Dynamic stability of passive bipedal walking on rough terrain: a preliminary simulation study[J]. Journal of Bionic Engineering, 2012, 9(4): 423-433. |
| [18] | Su J L S, Dingwell J B. Dynamic stability of passive dynamic walking on an irregular surface[J]. Journal of Biomechanical Engineering, 2007, 129(6): 802-810. |
| [19] | Bogsjö K, Podgórski K, Rychlik I. Models for road surface roughness[J]. Vehicle System Dynamics, 2012, 50(5): 725-747. |
| [20] | Rao X B, Gao J S, Ding S L, et al. Multistability of gaits, the basin of attraction and its external topology in the simplest passive walking model on stairs[J]. Chaos, Solitons & Fractals, 2023, 172:No. 113592. |
| [21] | Balcerzak M, Dąbrowski A, Stefański A, et al. Spectrum of Lyapunov exponents in non-smooth systems evaluated using orthogonal perturbation vectors[C]∥MATEC Web of Conferences, Lodz, Poland, 2018, 148: No.10003. |
| [22] | 丁旺才. 多自由度碰撞振动系统的环面分岔与混沌研究[D]. 成都: 西南交通大学力学与工程学院, 2004. |
| Ding Wang-cai. Research on torus bifurcations and chaos of multi-degree-of-freedom vibro-impact systems[D]. Chengdu: School of Mechanics and Engineering, Southwest Jiaotong University, 2004. | |
| [23] | Singh J P, Roy B K. Crisis and inverse crisis route to chaos in a new 3-D chaotic system with saddle, saddle foci and stable node foci nature of equilibria [J]. Optik, 2016, 127(24): 11982-12002. |
| [24] | Gritli H, Belghith S, Khraief N. Cyclic-fold bifurcation and boundary crisis in dynamic walking of biped robots[J]. International Journal of Bifurcation and Chaos, 2012, 22(10): No.1250257. |
| [25] | Zhang Y, Luo G. Detecting unstable periodic orbits and unstable quasiperiodic orbits in vibro-impact systems[J]. International Journal of Non-Linear Mechanics, 2017, 96: 12-21. |
| [1] | 孙淑琴,祁鑫,袁正海,李再华,唐晓骏. 基于耦合混沌系统阵列的电力系统微弱谐波检测方法[J]. 吉林大学学报(工学版), 2025, 55(3): 1082-1092. |
| [2] | 王世俊,罗冠炜. 含多种碰撞约束振动系统的周期运动转迁特性[J]. 吉林大学学报(工学版), 2024, 54(4): 902-916. |
| [3] | 杨艳,侍玉青,张晓蓉,罗冠炜. 一类多刚性限幅振动系统的动态稳定性分析[J]. 吉林大学学报(工学版), 2023, 53(2): 364-375. |
| [4] | 白伦华,沈锐利,张兴标,王路. 自锚式悬索桥的面内稳定性[J]. 吉林大学学报(工学版), 2019, 49(5): 1500-1508. |
| [5] | 缪东晶,吴聊,徐静,陈恳,谢颖,刘志. 飞机表面自动喷涂机器人系统与喷涂作业规划[J]. 吉林大学学报(工学版), 2015, 45(2): 547-553. |
| [6] | 杨志晓, 范艳峰, 孙福艳. 基于正态云模型的虚拟人点头动作不确定性控制[J]. 吉林大学学报(工学版), 2012, 42(02): 476-482. |
| [7] | 杨茂, 李成凤, 田彦涛. 动态环境下群体机器人同步的分布式控制[J]. 吉林大学学报(工学版), 2011, 41(02): 497-0502. |
| [8] | 田为军, 金敬福, 丛茜. 非线性时间序列分析在动态稳定性研究中的应用[J]. 吉林大学学报(工学版), 2010, 40(增刊): 282-0286. |
| [9] | 何学军;张琪昌;赵德敏 . 索结构风雨振的周期运动及混沌运动动力学[J]. 吉林大学学报(工学版), 2009, 39(03): 679-0685. |
| [10] | 邓宗全,侯绪研,高海波,胡明 . 基于协调运动控制的摇臂式探测车路径多属性决策[J]. 吉林大学学报(工学版), 2008, 38(04): 930-935. |
| [11] | 吴冬梅,杜志江,孙立宁. 面向髓内钉闭合穿钉手术的机器人系统[J]. 吉林大学学报(工学版), 2006, 36(02): 232-0236. |
| [12] | 李 胜, 林 逸. 汽车转向轮摆振分岔特性的数值分析[J]. 吉林大学学报(工学版), 2005, 35(01): 7-0011. |
|
||