

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
面向高空飞艇平台的视频增强与稳像
[王书民1  , 张爱武
, 张爱武1 , 王飞1 , 胡少兴2 , 孙卫东3 , 仰继连3 ]
, 张爱武, 王飞|
|


王书民(1985),男,博士研究生.研究方向:计算机视觉与摄影测量.E-mail:wmcnu@163.com
针对高空飞艇平台获取的视频监测数据存在的问题,提出了帧内增强去雾和帧间去除高频振动分量的稳像方法。采用基于Retinex图像增强技术进行帧内增强处理,去除薄雾,保留图像细节,还原真实色彩;建立四自由度全局运动估计模型,并采用中值滤波方法进行运动补偿,去除高频振动分量,实现帧间稳像;并给出未定义区域重建算法。通过实际应用,证明了本文算法能够很好地实现飞艇视频稳像,在帧内增强和帧间稳像方面均有良好效果,可满足后期监测分析需求。
An image stabilization method is proposed for the problems existing in the video acquired from high altitude airship platform. It can remove the fog in the intra-frame images and filter the high frequency vibration components in the inter-frame images. The image enhancement technique Retinex is adopted to remove the fog in the intra frame images. It retains the details of the image, and restores the genuine color of image. Then, the four freedom global motion mode is established to estimate the global motion, and the median filter is adopted to smooth the global motion and remove the high frequency vibration components. It achieves the image stabilization in the inter-frame images. The algorithm of constructing the undefined area is given at the same time. Through the practical application, the algorithm proposed in this paper achieves the image stabilization for the video acquired from airship platform perfectly. It gets good image stabilization results in the intra-frame images and inter-frame images, which meet the requirements of monitoring and analyzing.
基于高空飞艇平台的视频监测系统,近几年来备受人们关注,在智能交通、应急减灾、数字城市建设等领域具有重要应用前景。然而在受到云雾、强对流等复杂天气条件及飞艇动力系统高频振动的影响,获取的视频监测数据通常具有以下问题:①帧内影像受薄云或雾霾等的影响,其清晰度有所降低,严重影响地物的分辨及有效信息的提取;②帧间影像受高频振动等影响,存在严重的抖动现象,不利于目标跟踪与对象识别。因此,必须同时进行高空飞艇视频数据的帧内增强和帧间稳像处理。针对上述问题,本文先采用Retinex图像增强技术进行帧内增强,去除薄雾,以提高单帧影像清晰度。再采用基于SIFT特征区匹配的帧间稳像算法,并结合自适应中值滤波消除高频振动。实验结果表明,本文方法可在提高图像可用信息量的同时消除高频抖动。
对于飞艇移动造成的像移影响,由像移计算公式[ 1]:l=(fvt)/3.6H计算。其中,l为像移大小(像素),f为相机焦距(mm),v为飞行速度(m/s),t为曝光时间或快门速度(s),H为相对航高(m),考虑到高空飞艇飞行高度通常在500~1200 m或是更高,飞行速度一般在10~12 m/s,而快门速度通常在1/800 s或是1/1000 s,因此,在光线充足的条件下,对于飞行速度缓慢的高空飞艇监测系统,其像移影响可不做考虑。而受天气条件的影响,获取的遥感监测影像中经常会存在块状的云或是布满整幅影像的薄雾,严重减少了影像中的可用信息量。国内外对遥感图像的去云去雾处理做了大量研究,朱锡方等[ 2]提出了基于Mallat算法的去云算法,算法在选择参数时较多地依赖主观经验;文献[ 3]提出了基于图像分割的遥感影像去雾方法,算法需要异源数据作为参考;李新宇等[ 4]提出了高维空间几何信息学的遥感图像去薄云算法,算法需要选择合适的参数和各向异性滤波器,通用性较差;文献[ 5]提出了传感器在线实时去雾方法,单帧影像中需要同时存在道路、天空等作为参考进行能见距离估计;文献[ 6, 7, 8, 9]采用同态滤波算法进行去云去雾处理,在遥感影像的傅立叶变换中,云层表现为低频分量,可通过设计高频滤波器将其滤除。文献[ 10, 11, 12, 13]提出了基于人眼视觉特性的Retinex去雾处理方法,该类算法是以色彩恒常性理论为基础,实现对图像的增强,已经成为研究的热点。
由Retinex理论知获取的影像由入射光分量和反射光分量组成,即:
I(x,y)=R(x,y)·S(x,y) (1)
式中:I(x,y)表示待增强图像;R(x,y)表示反射分量;S(x,y)表示入射分量。
对式(1)取对数,可得:
logI(x,y)= logR(x,y)+ logS(x,y) (2)
通过高斯平滑滤波得到入射分量,即
S(x,y)=F(x,y)*I(x,y) (3)
将式(3)带入式(2)得到对数域中的反射分量:
logR(x,y)= logI(x,y)- log[F(x,y)*I(x,y)] (4)
式中:*为卷积运算;F(x,y)为高斯模板函数; 
估计入射分量是Retinex算法的关键,其决定图像最终增强的效果。考虑到图像去雾后存在细节保留、色彩保真等问题,本文采用具有色彩还原特性的多尺度Retinex的去雾算法作相应处理:
(1)影像数据在对数域处理之前必须进行精度转换,通常转换为double类型,确保入射分量估计的精度。
(2)采用多尺度Retinex算法进行光照估计,即:
 | (5) |
式中:i为R、G、B三个波段,高斯滤波尺度因子分别取δ1、δ2、δ3,高斯滤波模板大小为80×80像素,对滤波后3个尺度的输出结果进行加权叠加,wi为权重系数。
(3)构建色彩还原因子,即:
 | (6) |
式中:β、α分别为增益、偏移补偿向量。
最终输出增强后图像为
 | (7) |
即:
 | (8) |
Lowe[ 14]提出尺度不变特征匹配,不仅对影像平移、旋转、缩放等具有很强的鲁棒性,同时对光照变化、仿射变换、投影变换等也具有部分不变性。
在特征点的初始匹配过程中,采用了欧式空间内的最近邻距离与次近邻距离的比值和设定阈值之间的比较作为判别匹配点的约束条件,因此不可避免地引入特征点之间的误匹配。在剔除误匹配特征点的过程中,采用随机采样运算法则[ 15](Random sample consensus)进行粗差剔除,进一步保证匹配精度。其主要步骤为:①随机选取4对初始匹配的SIFT特征点;②使用匹配特征点计算匹配影像之间的单应性矩阵 H; ③再由单应性矩阵 H计算匹配内点( inliers); ④重复 ①~③步骤直到 SSD( Sum of squared diffe rences)小于特定阈值; ⑤保持最大数量的匹配点对; ⑥重新计算单应性矩阵 H,并计算匹配内部点。
飞艇在飞行过程中,受到气流颠簸、动力系统高频振动等影响,使得相邻帧间存在平移、缩放、旋转等运动,构建相邻影像帧间运动模型是进行运动估计和补偿的前提条件,考虑到误差积累可能导致运动补偿后影像变形,本文采用影像刚体变换模型,即:
 | (9) |
式中:( x n, y n)为第 n张影像像素坐标;( x n-1, y n-1)为第 n-1张影像像素坐标; θ为相邻影像之间的旋转角度;d x、d y为平移量; γ为缩放因子。
 | (10) |
式中: a、 b表示旋转变换参数; c、 d为在垂直和水平方向上的平移参数。
式(10)简记为: x n =A n-1 x n-1 +b n。依次类推:
 | (11) |
对于相邻帧间运动参数实际解算,通常是通过匹配的 m( m>3)对 SIFT特征点构建2 m个超正定方程,通过最小二乘可以求取运动补偿参数矩阵[a b c d] T,即:
 | (12) |
影像序列全局运动估计包括有意运动和无意运动估计,有意运动为视频传感器在飞艇平台的驱动下进行运动,无意运动为飞艇受气流和动力系统影响造成的高频振动分量,因此,必须进行无意运动和有意运动的分离。平滑滤波可以有效改善图像序列的抖动现象,保存图像的有意运动,常采用的滤波算法中,卡尔曼滤波[ 16]需要对运动序列影像建模,参数难以确定,曲线拟合[ 17]能得到光滑的运动估计曲线,但是容易偏离真实的全局运动矢量,不宜采用。均值滤波[ 18]及高斯滤波[ 19]属于平均算法,易产生过稳和偏离真实轨迹现象。本文根据高频振动的幅度采用对振动脉冲信号具有较好抑制作用的自适应中值滤波进行平滑处理。
假定第 n张影像 I n的全局运动估计量为 GMV( n),其中有意运动量为 SMV( n),无意运动(高频振动分量)为 UMV( n)。影像 I n的全局运动估计量是以序列的第一张影像 I1为基准进行运动估计的;在理想条件下,传感器曝光时间 t很小(例如0 .001 s),地物特征在相邻帧间应是一一对应的,但由于高频振动的存在,使得相邻帧间存在平移等相对运动,因此, UMV( n)的估计以其相邻帧为参考影像进行检测,即影像 I n的无意运动 UMV( n)的估计以相邻帧 I n-1为参考进行,根据式(10)可以进行求解。对于式(11)求取的影像全局运动估计量,可以根据 UMV( n)幅值大小,自动调整中值滤波窗口,实现滤波后有意运动量 SMV( n)的输出。
假定影像序列全局运动估计量为: x1, x2, x3,…, x n,把 n个数按照从小到大的顺序排列,序列中的中值定义为
 | (13) |
中值滤波是基于次序统计完成信号恢复的一种典型的非线性滤波方法。对于振动脉冲信号干扰来说,特别是脉冲宽度小于滤波窗口一半且相距较远的脉冲干扰,中值滤波是很有效的;而当脉冲宽度大于滤波窗口宽度的一半时,经过中值滤波器的脉冲则被保留,因此中值滤波器能够去除脉冲噪声而保留信号的细节[ 20]。滤波窗口根据振动脉冲信号的峰值大小自动调整大小为3、5、7等。在获取平滑的运动估计向量后,根据式(11)进行运动补偿,实现影像序列的稳定输出。
对于影像序列的逐帧累加补偿,即单帧影像相对于像空间坐标原点在 x、 y轴方向上的补偿,由式(11)知,随着影像序列帧数的递增,第 n帧影像在 x、 y方向上的补偿量d x、d y也逐渐增大,但是单帧影像的像素坐标通常是以左上角为坐标原点,随着 n的增大,补偿后的影像未定义区域变大,即数据“黑洞”越大。因此为了运动补偿后的影像序列能够实现平滑、稳定、连续输出,需要通过影像镶嵌的方法对未定义区域进行重建。
假设第 n-1帧影像 I n-1为参考帧影像,第 n帧影像 I n为当前帧影像,通过 SIFT特征检测和匹配可以求取像空间变换参数 A n,并根据式(11)对影像 I n进行运动补偿。对于影像 I' n重建的方法,是根据参考帧影像 I n-1和运动补偿后影像 A n I n进行加权融合重建的,具体流程如下:如果 I n( i, j)≠0且 I n-1( i, j)≠0,则 I' n( i, j) =αI n-1( i, j) +βA n I n( i, j);反之, I' n( i, j) =I n-1( i, j) +A n I n( i, j)。其中, I n( i, j)为第 n帧影像的像素坐标, α、 β为加权平均系数,且 α+β=1。
本文以2010年12月在三峡库区重庆段进行的低空遥感监测为例,无人飞艇飞行高度500 m,飞行速度20 km/h,搭载了索尼 HDR-FX1 E摄像机,影像采集速度为25 帧 /s,单帧影像为720 ×576像素,由于受气流颠簸和飞艇动力系统的影响,影像序列表现出严重的抖动现象,严重影响了后期的监测和分析。实验在惠普 Hpxw4600上进行,其主要配置为 Intel酷睿2处理器,主频为3 .06 GHz,内存大小为4 G,同时实验采用 VC6 .0软件为平台,结合 OpenCV库编写了 win32控制台程序,进行了300帧序列影像的增强与稳像处理。考虑到算法的实时性,本文根据文献[ 21]对 SIFT特征匹配进行了简化处理,在尺度空间极值检测后,统计圆形窗口内12个梯度方向并进行归一化处理,向左循环遍历整个梯度序列直到最大的梯度向量位于序列的首位,以保证算法的旋转不变性;在匹配的同时采用正反向匹配以保证算法性能,算法简化前后,平均单帧影像稳像处理耗时分别为828 ms和86 ms,基本满足算法准确、快速的要求。
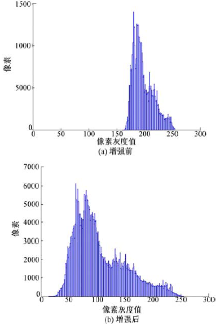
从图1( a)可以看出,受天气条件影响,获取的视频监测数据中存在薄雾,视频分解后影像的清晰度很低。实验采用基于 Retinex图像增强算法进行去雾处理,首先将图像转换为 double类型数据;根据经验阈值,分别设定高斯滤波函数的尺度 δ1、 δ2、 δ3为15、80、200进行入射分量的估计,并对取得的对数域反射影像采用权重系数均为1/3的加权融合;其中,增益偏移补偿常量参数G、b、α、β分别取值为192、-30、125、46。从图1(b)可见,影像去除薄雾后,还原了真实色彩且极大地保持了细节。序列影像绝大多数灰度均值基本上分布在103~121,且标准方差分布在45~56,如图2所示。满足视觉效果的最佳值分布标准[ 22]。
 | 图1 采用Retinex技术进行帧内增强处理Fig.1 Adopt Retinex technique to enhance intra frame |
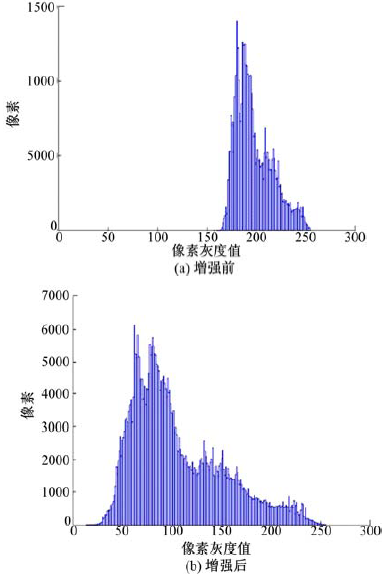 | 图2 帧内增强后图像的直方图对比Fig.2 Histogram comparison of image before and after enhancement |
低空无人飞艇遥感监测是按照设定好的航线自主驾驶飞行。实验选取视频数据是以飞艇前进方向为Y轴指向,X轴垂直于飞艇前进方向指向右,构成右手直角坐标系。
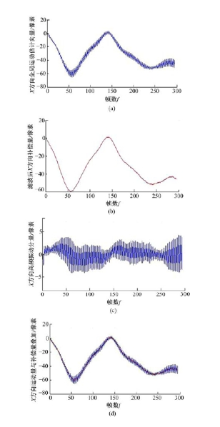
首先进行X方向全局运动估计,从图3(a)和表1可以看出,X轴全局运动估计表现为伴随有高频振动的左右摆动,其主要原因是飞艇受侧面气流和发动机高频振动的影响;然后进行X方向上高频振动分量的检测,从图3(c)可以看出,高频振动分量表现为围绕坐标横轴(零像素)进行上下抖动的脉冲信号,抖动幅度高达4个像素左右;根据高频振动分量峰值的大小,自动调整中值滤波窗口,对全局运动估计量进行滤波,从图3(b)和表1中X轴运动补偿可以看出,高频分量分离后的全局运动补偿量较为平滑,滤波后数据保留了飞艇的实际运动轨迹(见图3(d)),并没有发生实际运动轨迹的偏离。
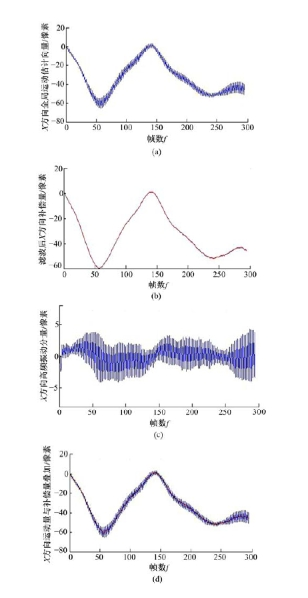 | 图3 X轴方向全局运动估计,高频振动检测及平滑滤波Fig.3 Motion estimation,high-frequency vibration detection and motion filter in X direction |
| 表1 连续10帧影像的全局运动估计及运动补偿(单位:像素) Table 1 Motion estimation and motion compensation of 10 consecutive images |
Y轴方向上的全局运动估计量呈现为伴随有高频振动脉冲信号的整体递增趋势(见图4(a)和表1中Y轴全局运动估计);同样,Y轴方向上分离出的高频抖动分量也高达5个像素(图4(b)),但是表现为不连续的振动脉冲信号,其主要是由于受气流阻力和发动机增速造成。采用自适应中值滤波对全局运动估计向量进行滤波,平滑后的运动补偿向量效果理想(图4(c)和表1中Y轴运动补偿),且没有发生实际运动轨迹偏离的现象(见图4(d))。
 | 图4 Y轴方向全局运动估计,高频振动检测及平滑滤波Fig.4 Motion estimation,high-frequency vibration detection and motion filter in Y direction |
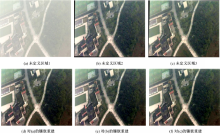
在运动补偿时,单帧影像中出现未定义区域,并且由式(11)知,未定义区域随着影像序列补偿帧数的增加逐渐增大,因此必须对影像序列中的未定义区域进行重建(见图5)。用重建后的影像作为基准影像,对下一帧当前影像进行匹配及运动估计。
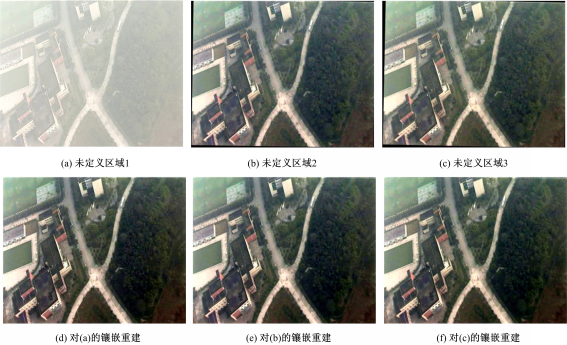 | 图5 采用影像镶嵌技术对未定义区域进行重建Fig.5 Adopt image mosaic technique to reconstruct undefined area |
峰值信噪比(PSNR)评定标准反映的是参考图像和当前图像间的峰值信噪比[ 23]。PSNR越大,图像稳像效果越好,若两帧图像的运动矢量为零,则PSNR应该为无穷大。PSNR的表达形式为


式中:F(x,y)和R(x,y)分别表示当前图像与参考帧图像在(x,y)处的灰度值,M×N分别表示图像X方向与Y方向的像素数。稳像实验前后,X方向的PSNR平均值分别为11.258和33.268,而Y方向的PSNR平均值分别为12.536和34.265,实现了相邻帧间的稳定输出,满足了后期的遥感监测需求。
针对艇载视频传感器在成像时受复杂天气条件和发动机高频振动影响所表现出的帧内影像模糊和帧间抖动现象,先采用Retinex图像增强技术进行帧内增强处理,去除薄雾,以提高单帧影像清晰度;再采用基于SIFT特征匹配的帧间稳像算法,并结合自适应中值滤波消除高频振动。实验表明面向高空飞艇的视频稳像算法可以复原单帧影像的真实色彩并保留图像细节,以提高图像可用信息量,同时消除了高频抖动,有利于目标的跟踪和地物的分辨,为后期的数据分析提供了保障,研究结果在高空飞艇的监测和跟踪等领域具有重要应用价值。在后续工作中将进一步提高算法的实时性及效率。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|