

{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于Kalman滤波行程时间预测的BRT车速诱导
[王宝杰 , 王炜, 杨敏, 华雪东]
, 王炜, 杨敏, 华雪东]
, 王炜, 杨敏, 华雪东]
|
|


王宝杰(1987),男,博士研究生.研究方向:公共交通运输规划与管理.E-mail:wangbj2@163.com
提出了一种基于Kalman滤波行程时间预测的快速公交(BRT)系统车辆速度诱导模型。该模型从分析BRT系统运营特性和交叉口交通信号管控特征出发,首先建立站点停靠时间预测模型和Kalman滤波行驶时间预测模型,分别对BRT车辆在站点停车上、下客时间和BRT车辆在站点与交叉口间行驶时间进行预测;然后根据车辆到达交叉口的时刻不同,分4种情况建立BRT车速推算模型对车辆行驶速度进行诱导;最后利用常州市13号BRT线路的调查数据,对模型进行有效性检验。结果表明,该模型可以显著提高BRT车辆的运行效率,具有很好的工程实用性。
In this paper a Bus Rapid Transit (BRT) speed induction model based on the Kalman travel time prediction is proposed. First, the stop time prediction model in the bus station, and the Kalman travel time prediction model between the bus station and the intersection are established. Second, according to the difference of the vehicle arriving time at the intersection, four speed induction models are introduced. Finally, the BRT travel data in the city of Changzhou is used to test the effectiveness of this model. The results show that this model can significantly improve the efficiency of the BRT system, and it has a good engineering application prospect.
快速公交(Bus rapid transit,BRT)系统是一种介于轨道公交和常规公交之间的新型公共交通客运方式,它配置有全时段、全封闭的公交专用道和车外站点售票服务系统,利用先进的智能交通技术进行运营和管理,具有高效率、高品质、低能耗、低污染的特点。随着城市发展规模的不断扩大和机动化水平的日趋提高,常规公交系统已无法满足乘客高频率、高效率、高服务水平、长距离的出行要求,BRT作为一种成本低、效率高、运量大的公共客运交通形式逐渐得到人们的青睐。然而,由于受交叉口社会车辆和信号交通管控的影响,BRT车辆在交叉口停车等待绿灯的现象时常发生,车辆时走时停、平均运营速度低、交叉口尾气污染、行车服务水平差等严重制约着BRT快速公交系统高效、快捷、环保优势的发挥[ 1]。为充分发挥BRT快速、高效、低能耗的运营优势,本文综合考虑公交车辆运营特性,应用Kalman实时预测公交车路段行驶时间[ 2, 3, 4],并结合车辆站点停靠上下客时间和交叉口信号配时,对BRT车辆行驶车速进行诱导,提高快速公交系统运营效率[ 5],有效避免BRT车辆在交叉口停车等待绿灯现象的发生[ 6]。
与社会车辆不同,公交车辆具有固定的发车间隔、固定的停靠站点和固定的行驶路线,其从站点到达交叉口的运行时间包括车辆在固定站点的停靠时间和车辆在固定路段的行驶时间。公交车辆的行程时间只受公交站点运营状况和车辆路段行驶状况影响[ 7],学者一般应用趋势外推法、支持向量机法、神经网络法和Kalman滤波法等对公交车辆行程时间进行预测。本文综合考虑BRT系统的运营特点,将公交车辆的行程时间划分为站点停靠时间、交叉口停车时间和路段行驶时间,并利用样本量小、计算速度快、预测精度较高的Kalman滤波预测模型对BRT车辆在站点和交叉口间的行驶时间进行预测。其中,站点停靠时间主要由公交站点运营状况决定,包括站点客流吞吐量,乘客上、下车时间,站点售票方式等;路段行驶时间主要由路段行驶状况决定,包括道路交通状况、天气状况、车辆和驾驶员状况等[ 8]。
BRT系统一般采用水平登乘、车外站点售票和实时信息监控的布站方式,站点停靠时间主要由站点客流量所决定。站点停靠时间预测模型建立条件假设如下:
(1)BRT系统采用车外站点售票方式,车辆到站之前即可有效统计出车站乘客数量。此外,站点停靠时间模型将乘客到达假定为均匀到达,且乘客到达率为 λ。
(2)BRT系统采用水平登乘,并配有实时信息发布装置,因而可假定乘客平均登车时间为一固定值,且车辆停靠时间主要由乘客登车时间决定。
(3)BRT系统车辆在站点的停靠时间,可如轨道交通站点停靠时间一样,能够调整和预控。
(4)每个停靠站点只服务一条BRT线路,且车辆到达站点时不存在窜车现象。
(5)将BRT系统车辆在停靠站点的加、减速过程视为车辆路段行驶时间的一部分。
在同一路段行驶的相邻班次BRT系统车辆,具有相似的交通状况、天气状况等路段行驶条件,且其相似度随发车间隔的减小而增强。路段行驶时间预测模型建立条件假设如下:
(1)相同路段的道路交通状况时变性相对稳定,即该路段未来时段的道路交通状况与相邻的前几个时段的道路交通状况存在一定的联系。
(2)同一公交线路上,公交车辆的运行性能基本相同,同时忽略驾驶员因素对车辆行程时间的影响。
(3)BRT系统车辆在公交专用道上的最大行驶速度设定为 v2,满足乘客舒适性和车辆运行效率的最小行驶速度设定为 v1 。
(4)车辆在交叉口停车等待绿灯通行的时间被视作车辆行驶时间的一部分。
(5)BRT系统车辆在同一路段上沿不同方向行驶的情况,视为行驶在不同线路上。
BRT系统车速诱导的数学模型由Kalman滤波预测模型和BRT系统车速推算模型组成。其中,Kalman滤波预测模型对车辆到达站点后的停车时间和由站点与交叉口间的路段行驶时间进行预测,分为站点停靠时间预测模型和车辆路段行驶时间预测模型;BRT系统车速推算模型是从车辆路段行驶速度特性出发,以Kalman滤波预测模型输出结果为基础,结合交叉口信号配时对BRT系统车辆最优行车速度进行推算。
考虑到在同一路段运行的公交车辆具备相似的行驶状况,将公交车辆运营时间分为若干时段,并采集各时段前几班次公交车运营数据,应用Kalman滤波预测模型,对该时段未来班次公交车辆的行驶时间进行预测。模型参数定义如下: 
(1)站点停靠时间预测模型
BRT系统站点配有乘客信息服务系统和车外站点售票系统,乘客需购票后进站。由于乘客登车前均已完成购票、检票工作,并有乘客信息服务系统提示乘车信息,车辆站点停靠时间主要取决于纯粹的乘客上、下车时间。同时车外站点售票系统的应用,还可保证在公交车辆到站前即能准确统计出预乘车人数。因而建立站点停靠时间预测模型时,可设定站点乘客到达率 λ和人均登车时间 Q均为一固定值。站点停靠时间预测模型为
 | (1) |
(2)路段行驶时间预测模型
道路交通状况具有时空分布特性,随着时间和路段的变化而变化,致使公交车辆在不同路段、不同时间运行的外界影响因素很难用数学模型进行准确地标定和预测。但考虑到BRT系统设置有全时段、全封闭的公交专用道,车辆在某路段上的未来行驶状况与该路段前几个时段的行驶状况具有一定的相似性,可以利用公交车辆在某路段前几个时段行驶时间的历史数据来预测公交车辆在该路段未来时段的行驶时间。Kalman滤波采用状态方程和观测方程组成的线性随机系统的空间模型来描述滤波器,按线性、无偏、最小均方误差估计准则,采用一套递推算法对该滤波器的状态变量作最佳估计,计算量和存储量小[ 9, 10, 11],可以很好地应用于公交车行程时间预测技术中。路段行驶时间预测模型为:
 | (2) |
 | (3) |
 | (4) |
 | (5) |
 | (6) |
式中: T( k/( k-1))为第 k班次公交车在站点与交叉口间行驶时间的预测值; T( k/ k)为第 k班次公交车在站点与交叉口间行驶时间的最优预测值; y( k)为第 k班次公交车行驶时间的观测值; G( k)是第 k班次公交车辆行驶时间预测过程的滤波预报器增益; P( k/ k)是第 k班次公交车辆行驶时间预测过程的预报误差方差阵; Q( k)为输入白噪声方差; R( k)为系统观测噪声方差; In是一个单位矩阵,此处取1。
(3)车辆到达交叉口时刻
以车辆到达站点的时刻为模型计算起始时刻,车辆达到交叉口时刻可定义为车辆到达站点的时刻与车辆在站点的停靠时间和车辆在路段的行驶时间之和。车辆达到交叉口时刻计算如下:
 | (7) |
对上式进行简化,将式(1)带入式(6)可得车辆到达交叉口时刻为
 | (8) |
快速公交系统利用现代化智能公交技术,以大容量、专用公共交通车辆在全封闭公交专用道上运行,通常被期待具有大运量、高效率、低事故率、低污染的公共客运功效。然而由于交叉口社会车辆和交通信号控制的影响,BRT系统车辆运行速度很难达到30~40 km/h的设计车速,不能实现真正意义上的快速运营。调查显示,北京、济南、常州等公交系统发达城市的BRT系统车辆平均运行车速仅为20~25 km/h,其中部分路段甚至低于15 km/h。较低的运行车速和交叉口频繁停车,使得BRT系统系统很难发挥低碳、快速运营的优势[ 1]。
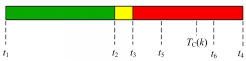
全时段、全封闭的公交专用道和专有公交停靠站点,令BRT系统车辆的运行和停车具有很好的可控性。因此在精确预测BRT系统车辆行驶时间和适当调整车辆站点停靠时间的基础上,结合交叉口信号配时特征对BRT系统车辆在站点至交叉口之间路段的最优行驶车速进行推算,为驾驶员提供车速诱导信息,可有效提高快速公交系统运营效率和服务水平,避免BRT系统车辆在交叉口的停车耗时。在控制BRT系统车辆通行方向的交叉口信号配时方案中,设 t1为交叉口绿灯起始时刻, t2为黄灯起始时刻, t3为红灯起始时刻, t4为红灯结束时刻。根据BRT系统车辆到达交叉口的时刻 T C( k)所处的信号阶段,分四种情况对车辆行驶速度分别进行推算,其中 T( k/ k)为第 k班次公交车在站点与交叉口间行驶时间的最优预测值,[ v1, v2]为BRT系统车辆行驶车速的取值范围。
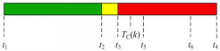
(1)如果预测的BRT系统车辆到达交叉口的时刻在绿灯时段(见图1),也即 T C(k)∈[ t1, t2]车辆可以正常通过交叉口,只需通过BRT车载信息服务系统向驾驶员提供正常行驶的车速诱导信息,行驶车速为 
 | 图1 车辆在绿灯时段达到交叉口Fig.1 Vehicles reaches intersection in green interval |
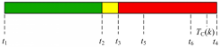
(2)如果预测的BRT系统车辆到达交叉口的时刻在黄灯或红灯时段,车辆通常可通过提高行驶速度在本次信号周期一次性通过交叉口,或适当降低行驶车速在下个信号周期一次性通过交叉口。但是考虑到BRT系统车辆的运营效率和运行舒适度,其行驶速度必须在一定的范围( v1≤ v( k)≤ v2) 内。因此存在某个时间段(见图2),BRT系统车辆无论加速运行,或者减速运行都无法保证一次性通过交叉口。设[ t5, t6]∈[ t2, t4]表征该时间段, t5表示加速至最大速度 v1时仍无法在本次信号周期绿灯结束时一次性通过交叉口的临界值,即 



 | (9) |
车辆到达交叉口的时刻为
 | (10) |
式中: W为在车辆站点停靠时间的修正值,且 W= t5- T C ( k)或 W= t6- T C ( k)。当| t5- T C ( k)|≤| t6- T C ( k)|时,取 W= t5- TC( k),也即缩短车辆在站点停靠时间,以保证能在绿灯结束前通过交叉口,BRT驾驶员行驶的诱导车速信息为 
 | 图2 车辆在不可控时段到达交叉口Fig.2 Vehicles reaches intersection in uncontrollable time |
(3)如果预测的BRT系统车辆到达交叉口时刻 T C ( k)∈[ t2, t5] (见图3),车辆可提高行驶速度在绿灯结束前通过交叉口,此时由BRT系统车载信息服务系统向驾驶员提供的行驶车速为 
 | 图3 车辆在红灯初始时段到达交叉口Fig.3 Vehicles reaches intersection in initial red interval |
(4)如果预测的BRT系统车辆到达交叉口时刻 T C ( k)∈[t6,t4] (见图4),车辆可降低行驶速度在下个周期绿灯开始时通过交叉口,此时由BRT系统车载信息服务系统向驾驶员提供的行驶车速为 
 | 图4 车辆在红灯结束时段到达交叉口Fig.4 Vehicles reaches intersection in end red interval |
综上所述,BRT系统车速诱导方案的实施可以通过如下步骤实现:首先,根据实际平、高峰交通运营状况将公交车辆运营时间划分为若干个时段,分别采集各时段前几班次公交车路段行驶时间,以此为样本预测该时段后面班次车辆在该路段的行驶时间;其次,根据实时采集到的站点候车人数,对站点停靠时间进行预测;最后,将预测结果和交叉口信号配时方案进行协同耦合,计算并发布车速诱导信息。
为验证模型的有效性和可行性,选取常州市13号BRT线路为实验对象,对其车辆运行状况进行调查。BRT13号线路在锦海星城和火车站公交中心站间运行,途经24个公交站点,线路全长14.7 km,高峰时段发车间隔为3~4 min,平峰时段发车间隔为5~6 min。此次调查的地点选择该线路途经的通江路龙城大道站和通江南路与飞龙中路交叉口,调查员分别在站点和交叉口记录BRT系统车辆到达龙城大道站的停车时间、车辆离开站点的启动时间、车辆到达交叉口的时间和车辆通过交叉口的时间,该路段BRT系统车辆运营效率不高,受交叉口影响明显,具有典型代表性;调查时间为2011年12月26日(星期一)~2011年12月30日(星期五)间的平峰时段(14∶00~16∶00)和高峰时段(16∶30~18∶30),共获得350组有效数据。
车辆从龙城大道站到通江南路与飞龙中路交叉口间的有效行驶距离 L=1.1 km,BRT乘客平均登车时间为 Q=0.83s/person,站点高峰时段乘客到站率为 λ=0.16 person/s,站点平峰时段乘客到站率为 λ=0.08 person/s,BRT车辆在龙城大道站到通江南路与飞龙中路交叉口的平均行驶速度为23.8 km/h。BRT系统车辆在通江南路与飞龙中路交叉口处由通江南路沿南北方向运行,其中绿灯时长为60 s,黄灯时长为3 s,红灯时长为77 s。
(1)站点停靠时间预测

式中: T A k、 T A k-1、 T B k均为车辆到站时间,数据通过车辆到达检测器获取。
(2)路段行驶时间预测


根据调查数据的统计特性,确定模型的初始启动值和模型的参数分别为 T(0/0)=108, P(0/0)=1012, Q(0)=1.235, R(0)=0.985, α=0.088, β=0.000 001 93,预测结果的误差分析如下:绝对误差为0.53%;标准误差为0.84%;相对误差为0.65%。
该路段平均行驶时间为108 s,预测结果的误差分析显示,绝对误差和标准误差均小于1 s,相对误差值为0.65%,完全满足交叉口车速推算模型的计算要求。
(3)BRT车速推算
根据站点停靠时间预测模型和路段行驶时间预测模型,预测得到车辆到达交叉口时刻为

在准确预测车辆到达交叉口时刻的基础上,根据BRT车辆到达交叉口时间的不同,将车速诱导方案分为四类。定义BRT车辆的最大运行速度为 v2=40 km/h;最小运行速度为 v1=25 km/h;则 t5=T(k/k)+ t2-72; t6= T( k/ k)+ t4-115。
利用以上模型进行运算,350组BRT系统车辆运行数据中,143辆车在第一时段到达交叉口,计算得到的诱导车速集中在30.4~38.1 km/h内,平均诱导行驶速度为35.8 km/h。
71辆车在第二时段到达交叉口,39辆车可缩短站点停靠时间,提高车辆行驶速度在本周期绿灯结束前通过交叉口,其诱导速度为BRT系统车辆最大运行速度40 km/h;32辆车可延长站点停靠时间,令更多的乘客乘坐本班次公交车,同时降低车辆行驶速度,使车辆在下个信号周期绿灯开始时通过交叉口,其诱导速度为BRT系统车辆最小运行速度25 km/h。
24辆车在第三时段到达交叉口,计算得到的诱导车速集中在37.0~37.5 km/h内,平均诱导行驶速度为37.3 km/h。
112辆车在第四时段到达交叉口,计算得到的诱导车速集中在35.6~25 km/h内,平均诱导行驶速度为28.9 km/h。
综上所述,应用车速诱导模型得到的BRT系统车辆平均行驶速度为33.4 km/h,调查得到的BRT系统车辆实际行驶速度为23.8 km/h,经过行程时间预测和车速诱导的车辆行驶速度比原来提高了40.3%。实例证明,该车速诱导模型实用效果好,可以应用到工程实践中。
从BRT系统现状问题出发,首先通过具体分析BRT系统的运营特点,建立站点停靠时间预测模型和路段行驶时间预测模型,分别对BRT系统站点停车时间和BRT系统车辆在站点与交叉口间行驶时间进行预测,从而获取车辆到达交叉口的时刻;其次结合控制BRT系统车辆运行的信号配时方案,将BRT系统车辆到达交叉口的时刻分为四类,根据车辆在站点与交叉口间路段的行驶时间预测值,分别对车辆行驶速度进行诱导;最后通过常州市13号BRT线路对模型有效性和可行性进行检验,结果显示本文提出的模型具有较强的工程实用性。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|