

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于TRIZ理论提高车辆转弯工况下的稳定性
引用本文
于振环, 刘顺安, 张娜. 基于TRIZ理论提高车辆转弯工况下的稳定性. 2014, 44(2): 325-329[YU Zhen-huan, LIU Shun-an, ZHANG Na. Stability of vehicles' cornering case based on TRIZ theory. 吉林大学学报(工学版), 2014, 44(2): 325-329] 
Permissions
Copyright©2014, 吉林大学学报编辑部
版权所有.吉林大学学报编辑部
基于TRIZ理论提高车辆转弯工况下的稳定性
于振环(1979),男,博士研究生.研究方向:车辆动力学.E-mail:yuzhenhuan@163.com
摘要
基于TRIZ理论的新型矛盾矩阵和创新原理,得出3种原理设想并应用于车辆制动系统。通过控制半主动悬架减振器的阻尼力来改变过渡轮负荷,从而控制外圈前轮的制动力,以此提高车辆回转过大时的操控稳定性。并进行了实车试验,由于采用了反转型半主动悬架控制垂向载荷,所以不需要使用车高传感器。试验结果表明,通过控制半主动悬架减振器的垂向阻尼力,车辆侧滑角得到了明显改善。
关键词:
车辆工程; 车辆动力学; 侧倾; 减振器; 侧滑角; 垂向载荷; TRIZ理论
中图分类号:U463
文献标志码:A
文章编号:1671-5497(2014)2-325-5
Stability of vehicles' cornering case based on TRIZ theory
Abstract
In this paper, based on the contradiction matrix and innovation principle of TRIZ theory, three strategies are proposed for the vehicle braking system. The transition wheel load is changed by controlling the damping force of the semi-active suspension shock absorber. Thereby, the outer front wheel braking force is controlled. This can improve the vehicle handling stability when the vehicle steering wheel rotation is over large. To verify the effect of the above method vehicle running test is carried out. As a reverse damping force semi-active suspension is employed to control the vertical load, so the vehicle height sensor is not needed in the test. Test result show that, by control of the vertical damping force of the semi-active suspension shock absorber, the vehicle slip angle is significantly improved.
Keyword:
vehicle engineering; vehicle dynamics; skidding; shock basorber; slip angle; vertical load; TRIZ theory
引言
为提高车辆的操控性,人们开发了多种车辆底盘控制系统并应用到实车上。其中包括制动力控制系统、减振器控制系统、四轮操舵系统等。传统的方法是将以上控制系统独立开发并应用,其结果并不能使车辆性能有明显提高。于是,探索将各独立的控制系统相互协调,成为一种新的操控系统成为研究的热点。
我国现阶段在车辆多操控系统的研究中还处于理论阶段。与一些发达国家还存在着一定的差距。本文利用TRIZ创新理论的矛盾矩阵法,研究车辆极限性能。
1 基于TRIZ理论的车辆极限性能分析
1.1 TRIZ理论新型矛盾矩阵
TRIZ创新理论使用率最高的部分就是阿奇舒勒矛盾矩阵及其所对应的40个创新原理[
1.2 车辆极限性能问题描述
车辆快速转弯时会产生较大侧倾,大大降低了车辆的安全性能。为防止这种现象的产生,只能用制动器将车速减慢,而如何让车辆转弯时能够稳定快速地通过,始终没有有效的解决方法。
1.3 TRIZ新型矛盾矩阵的应用
为了解决上述问题,欲改善的工程特性设定为车辆的稳定性和安全性,在Matrix2003中可以查到,以上两种特性分别对应48个工程参数中的NO.21和NO.37特性,具体内容如表1所示:
| 表1 欲改善的特性对应的创新原理 Table 1 The characteristics and the innovative principles |
由表1可知,两个欲改善的性能中都包含了创新原理NO.3、NO.10和NO.17,这些创新原理和其具体内容见表2:
| 表2 Matrix2003矛盾矩阵创新原理及其具体内容[ |
1.4 提高车辆极限性能的途径
NO.3局部质量原理的应用设想:应用此原理第一条,将四个轮的制动由均匀分布变成不均匀分布。即加大外圈前轮过渡性轮负载荷,减小其他三轮过渡性轮负载荷。
NO.10预先作用原理的应用设想:应用此原理第一条,当车辆回转过渡时,通过控制器的预判,在加大外圈前轮的垂向力的同时,产生与打滑相反的力矩。
NO.17空间维数变化原理的应用设想:应用此原理第一条,将制动方式由一维变成二维。即当车辆制动时,除制动器对轮胎产生的切向力以外,还要通过半主动悬架减振器对其施加一个法向力,进而提高车辆的稳定性和安全性。
根据上述分析,为了追求车辆的更好性能,可用减振器系统和制动器系统的相互配合来控制车辆侧滑。
2 利用TRIZ局部质量原理对车辆转弯制动系统的控制
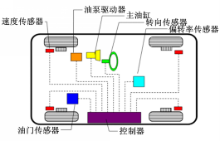
本文所用的防侧滑系统如图1所示:
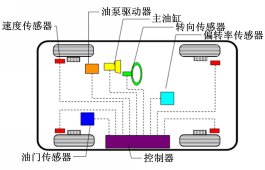 | 图1 稳定控制系统原理图Fig.1 Schematic of stability control system |
防侧滑系统主要是由控制器根据传感器信息计算得出结果,通过油泵产生的高压油来独立控制四轮的制动力。如图2所示:
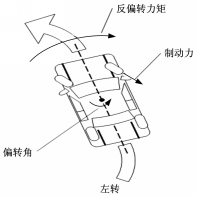 | 图2 制动力和抗偏转力矩Fig.2 Braking force and anti-spin moment |
车辆左转弯时由于回转过渡会有打滑倾向,根据局部质量原理,利用控制系统对外圈前轮施加制动力,使车辆会产生与打滑相反方向的力矩,从而防止打滑。
3 利用TRIZ空间维数变化原理提出过渡性轮负荷
3.1 反转型半主动悬架减振器
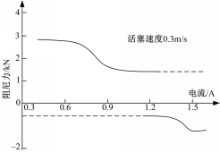
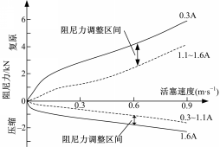
阻尼力控制系统所采用的是以比例螺线管作为传动装置的半主动悬架减振器。控制策略采用天棚理论。同时,通过操舵角和侧向加速度的微分数据反馈,能够降低车身侧倾角速度。如图3、图4所示:
 | 图3 阻尼力特性Fig.3 Damping force characteristic |
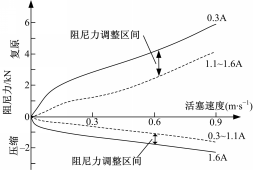 | 图4 F-V阻尼力特性Fig.4 Damping force characteristic |
减振器伸长方向的阻尼力在变换区域时,压缩方向的阻尼力固定在最小值。同样压缩方向的阻尼力可变换时,( F vs V) 伸长方向的阻尼力固定在最小值。
3.2 阻尼力设定和过渡性轮负荷
减振器做抽动运动时,轮胎的轮负荷被称做过渡性轮负荷,根据空间维数变化原理,将减振器加入制动系统中,使车辆制动系统由一维变为二维,即过渡性轮负荷可以通过半主动悬架的阻尼力进行调节。阻尼力设定及减振器行程和轮负荷的变化如表3所示:
| 表3 阻尼力和垂向载荷的变化 Table 3 Damping force and change of vertical load |
当车身浮起时,减振器处于伸行程。如果减振器伸长时的阻尼力变大,弹簧下侧受车身牵引,轮负荷会减少,伸行程时阻尼力小,轮负荷也会减少。相反,车身在下沉时,减振器处于压缩过程,如果减振器压缩方向的阻尼力大,过渡性轮负荷会增加。如果压缩方向的阻尼力小,过渡性轮负荷的增加就会得以抑制。所以,减振器的阻尼力伸方向设定大、缩方向设定小时,随着车身做上下运动产生的过渡性轮负荷就会减少。相反,伸方向设定小、缩方向设定大的场合,阻尼力会使轮负荷增加。反转型半主动悬架伸缩阻尼力的设定符合上述情况,所以不需要车高传感器等判断减振器伸缩行程的仪器,便可以调节车辆的过渡性轮负荷。
3.3 过渡性轮负荷的验证
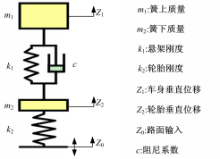
本文运用2自由度1/4车身模型[
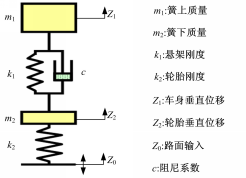 | 图5 四分之一车辆简化模型Fig.5 DOF quarter vehicle model |
来验证阻尼力设定和过渡性轮负荷的变化。如图6所示:
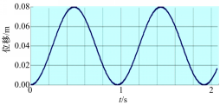
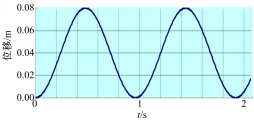 | 图6 道路波形图Fig.6 Road profile |
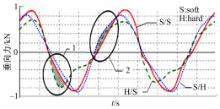
波长为12 m,高0.08 m的路面,以时速45 km/h通过时的轮负荷如图7所示:
 | 图7 轮胎负荷Fig.7 Vertical load of tire |
与伸、缩方向的阻尼力都小时的试验结果相比,阻尼力伸方向小、缩方向大时(2部位细虚线)的轮负荷有所增加。与此相反,阻尼力伸方向大、缩方向小时(1部位粗虚线)的轮负荷得以减少。以上论证表明,过渡性轮负荷可以进行控制。
4 利用TRIZ预先作用原理提出对防侧滑系统过渡性轮负荷的控制
根据预先作用原理,加大外圈前轮的垂向力,使制动力增大。把过渡性轮负荷应用到防侧滑系统中,系统运作时拟运用以下的控制策略。
控制策略A
:半主动悬架控制策略(天棚策略)作为对比标准的控制策略,无切换。
控制策略B:
增加制动轮的过渡轮负荷,将制动轮的阻尼力设定为伸方向小、缩方向大,让过渡性轮负荷增大。其他车轮的阻尼力设定为伸方向大、缩方向小。
控制策略C:
车身倾斜方向增加过渡性轮负荷,将转弯外侧的前后轮的阻尼力设定为伸方向小、缩方向大,将内侧前后轮的阻尼力设定为伸方向大、缩方向小。
控制策略D:
控制车身倾斜刚性来增加过渡性轮负荷,中断天棚控制,只控制车身倾斜刚性。
控制策略E:
增加半主动悬架控制策略的车身倾斜刚性增益,在实行半主动悬架控制的基础上,增大车身倾斜控制增益。而且,防侧滑系统的运算信息直接输送给半主动减振器。
5 试验验证
5.1 试验方法
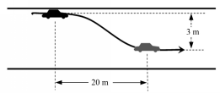
为了确认以上控制策略的效果,作者进行了行车试验。为了模拟过渡回转所产生的打滑倾向,实施了急转向换线试验,如图8所示:
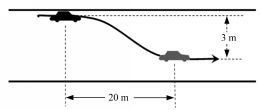 | 图8 车道变化试验Fig.8 Lane change tes |
5.2 试验测评
换线试验结果如图9所示:
 | 图9 车辆试验结果Fig.9 One of results of vehicle test |
车身的侧滑角和偏航角速度差(目标偏航角速度和实际偏航角速度)利用公式(1)(2)(3)[
式中: 







5.3 试验结果
5.3.1 最大侧滑角和偏航角速度差
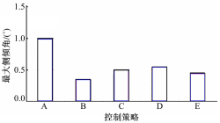
与半主动悬架控制的结果相对比,各控制策略的最大侧滑角如图10所示:
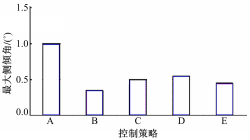 | 图10 稳定后的最大侧滑角Fig.10 Maximum slip angle after stability control |
任何一个控制策略的最大侧滑角都在半主动悬架控制策略的半数以下,特别是以增加制动轮的过渡性轮负荷为目的的控制策略B的侧滑角减少程度最大。
如图11所示:
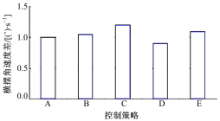
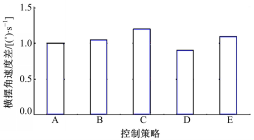 | 图11 横摆角速度差Fig.11 Difference yaw rate |
只有控制侧斜刚性的控制策略D的横摆角速度差最小。
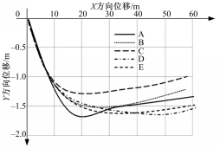
5.3.2 行车轨迹
忽略侧滑角,着眼于车身行车轨迹的结果如图12所示:

 | 图12 车身行车轨迹Fig.12 Vehicle trace lines during lane change test |
计算公式[
6 结束语
通过TRIZ理论的新型矛盾矩阵和创新原理对车辆的极限性能进行了全面分析,得出用减振器系统和制动器系统的相互配合来控制车辆侧滑的结论。根据现有防侧滑系统的工作状态,建立了由半主动悬架减振器来控制过渡性轮负荷和侧倾刚度的控制系统,最后通过实车试验进行了确认。以上控制方法具有以下特点:消除了原系统的缺陷;保留了原系统的优点;不会使系统结构变复杂;不会产生新的缺陷。满足了TRIZ创新理论对理想解的要求,用以上实验结论可以更好地提高车辆的极限性能。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|