













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于追尾碰撞的汽车座椅座靠连接运动机构设计
[孙琳琳1  , 孔繁森
, 孔繁森1 , 厙军威2 ]
, 孔繁森, 厙军威|
|


孙琳琳(1979),女,博士研究生.研究方向:人类工效学.E-mail:jlsonger@126.com
A new mechanism connecting seat cushion frame and seat back frame of automobile is designed using the instantaneous center principle of four bar linkage mechanism. The important design parameters, such as notch angle, notch clearance, notch curvature and friction coefficient are optimized using Finite Element Analysis (FEA) method. The feasibility of the mew mechanism is verified through rear-end collision test.
汽车发生追尾碰撞时,座椅是保护驾乘人员免受伤害的重要部件。因此,座椅结构安全性设计是汽车乘驾安全性中一个必须要解决的课题[ 1, 2]。澳大利亚Sjaan Koppel等人针对儿童座椅对座垫结构安全性做了研究[ 3]。波兰Marek等人从乘坐舒适性角度研究了座椅靠背与座垫对人体坐姿的影响[ 4]。瑞典Denis Alves Coelho等人研究了座椅靠背调节机构对人体H点的位置的影响[ 5]。此外,近几年国外有很多专家学者针对座椅靠背座垫调节机制对乘坐舒适性、安全性的影响做了大量的研究工作[ 6, 7, 8]。
目前研发出的座椅靠背角度与座垫角度调节机构有很多种,例如行星齿轮式调节机构[ 9]和凸轮轴式调节机构[ 10]。
本文主要针对靠背角度与座垫角度的调节,运用四连杆瞬心原理创新性地设计出一套新的座椅座靠连接运动机构,并且使用有限元模拟方法对该机构的重要设计参数进行了优化。最终通过相关试验验证了该机构槽口间隙应为0.3 mm,导向槽的设计角度必须要大于22°等设计参数的合理性。
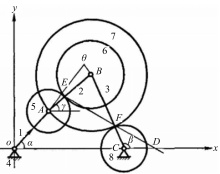
四连杆瞬心其实就是指四连杆的速度瞬心,如图1所示。速度瞬心是指在平面上作相对运动的两构件瞬时相对速度为零的重合点,或者说绝对速度相等的重合点,故瞬心可定义为两构件上的瞬时等速重合点。
 | 图1 四连杆速度瞬心简易图Fig.1 Velocity instantaneous center of double-link |
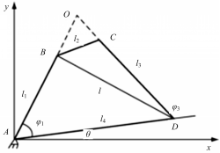
四连杆速度瞬心计算公式可参照图2[ 11]。图中ABCD为四连杆运动机构的铰接点,其瞬心为O。以A点为参考点建立坐标系,设O点的坐标为(x,y),根据几何关系有:
y=x tan (φ1 +θ ) (1)
y=(x- l1 cosθ) tan (φ3 +θ ) +l1 s inθ (2)
联立式(1)(2)得到:
x=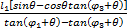 | (3) |
式中:
φ3=π- arccos - arccos - arccos | (4) |
l= | (5) |
 | 图2 四连杆机构Fig.2 double-link mechanism |
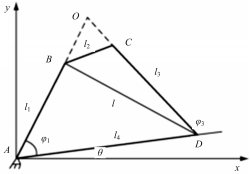
座椅座靠连接运动机构是指连接座椅座垫与靠背的一种执行机构,其主要作用是调节与保持座垫角度和靠背角度[ 7]。图3中黄色部分为靠背骨架,粉色部分为座垫骨架,灰色部分即为连接机构区域。
 | 图3 座椅骨架示意图Fig.3 The seat frame |
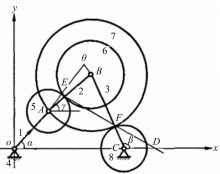
本文根据四连杆瞬心原理对座椅座靠连接机构进行了如图4所示的初步设计。AD杆为固定不动的机架,AB杆、BC杆、CD杆均可动。AB'杆、BC'杆、CD'杆分别表示四连杆机构运动到不同位置时的情况。四连杆机构布置到座椅上需要考虑以下情况:由于STO空间的限制,整体不能向前布置;C点的布置不能与高调杆干涉;C点的运动终止位置不能移出靠背STO过远;B点初始位置不能过于向前;B点在向后运动过程中不能与高调杆干涉;D点应与调角器结构之间保证足够大的间隙。
 | 图4 座靠连接机构初步设计图Fig.4 The preliminary design of ABCS |
根据四连杆运动的基本原理和上述的相关要求,本文将整个设计过程参数化,最终实现如图5所示的参数化约束。
 | 图5 最终实现的参数化约束Fig.5 Final parametric constraints |
根据最终的参数化约束,辅以连接运动机构设计的相关知识,本文开发出了如图6所示的座椅、座靠连接运动机构。
 | 图6 座椅、座靠连接运动机构开发流程图Fig.6 The developing flow chart of ABCS |
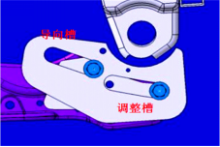
从图5的最终机构结构图可以看出,该机构的运动与执行特性主要取决于两个槽口的设计参数。因此座椅座靠连接运动机构的设计参数可以归结为如图7所示的两个槽口的设计参数。两个槽口中左侧的称为导向槽,右侧的称为调整槽。
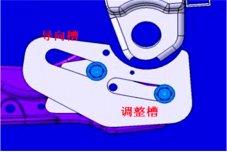 | 图7 机构简化示意图Fig.7 The simplified schematic diagram |
槽口设计参数主要包括槽口间隙、滚子与槽口以及销与滚子的摩擦因数、槽口的设计角度、槽口的设计曲率、导向槽与调整槽的夹角五项。
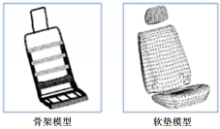
座椅模型的搭建主要考虑到后期所用的有限元分析软件LS-DYNA。本文建立如图8所示的座椅骨架模型和软垫模型。二者之间采用弹簧连接,以模拟软垫在各个方向上的自由度,某些相关细节做具体处理。整个座椅模型包括12 948个节点,12 053个单元,这12 053个单元中,有4056个体单元和7997个壳单元。
 | 图8 搭建好的有限元模型Fig.8 Finite element model |
本文使用的有限元分析软件为LS-DYNA,并且按照相关法规要求给予一个17.3 km/h的追尾碰撞速度。最终的追尾碰撞模型如图9所示。
 | 图9 最终的追尾碰撞模型Fig.9 Rear-end collision model |
槽口间隙是指槽口内安装的运动机构与槽口的单侧间隙。槽口间隙的大小直接影响槽口的受力情况,因此对槽口间隙大小做有限元分析也是非常必要的。
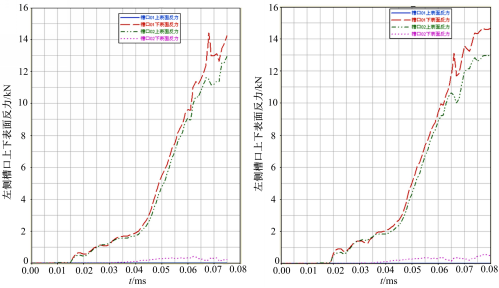
本文分别探讨了槽口间隙为0.1 mm和0.3 mm两种情况。二者的槽口受力情况如图10所示。当槽口间隙为0.1 mm时,左侧运动机构在70 ms时运动到位,右侧为运动到位;当槽口间隙为0.3 mm时,左侧运动机构65 ms运动到位,右侧为运动到位。两种情况下最大受力均发生在导向槽下表面,前者最大受力为13 000 N,后者最大受力为11 800 N。对比二者得出当槽口间隙从0.1 mm增加到0.3 mm时,运动机构的运动速度加快,槽口均为单侧受力且最大受力减小。因此0.3 mm的槽口间隙更适合该运动机构。
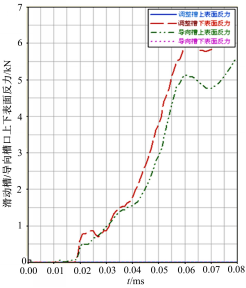
双槽口机构的运动依靠的是安装在槽口内的滚子的滚动,滚子又是依靠销得以滚动的,因此滚子与槽口的运动装配关系与销与滚子的运动装配关系得以实现的基础就是摩擦力。这两个摩擦力的大小会直接影响运动机构能否正常运动以及槽口上下表面反力的大小。本文首先试探性地选取滚子与槽口的摩擦因数为0.3,销与滚子的摩擦因数为0.1,得出槽口受力情况如图11所示。从受力图中可以看出,运动机构几乎没有什么运动。这说明滚子与槽口的摩擦因数对机构的运动起到很重要的作用,且所选参数过大。接下来按照一定规律递减这两个摩擦因数进行分析。当滚子与槽口的摩擦因数调整为0.1,销与滚子的摩擦因数调整为0.05时,分析得出:座椅左侧运动机构在65 ms运动到位,右侧运动机构在70 ms时运动到位。此外分析发现销与滚子之间的摩擦因数必须小于0.05,方可使滚子产生滚动。
槽口的设计角度是指槽口与水平方向所成的角度。槽口设计角度直接影响机构走完行程的时间、槽口保持受力为零的时间以及槽口到位时受力的大小。
通过有限元分析得出如表1所示的结果。表1中角度列中的负号代表逆时针角度,正号代表顺时针角度;第二列和第四列中的“/”号前后分别表示座椅两侧的运动机构。从表1中可以看出,槽口的基准设计角度最好能接近或者等于顺时针10°。
| 表1 槽口设计角度分析结果 Table 1 The result of notch angle |
除上述详细分析的三项设计参数外,槽口的设计曲率和导向槽与调整槽的夹角也对该机构设计成败起着至关重要的作用。
槽口的设计曲率就是槽口几何形状的曲率特性。可以想到,槽口的曲率会影响滚子在槽口内的运动轨迹,从而影响机构的运动轨迹。本文通过对比研究不等曲率槽口和等曲率槽口两种情况发现:等曲率槽口减少了运动机构走完行程所需的时间,因此更加有利于本文所设计的机构。
前面的分析虽然确定了槽口的基准设计角度,即为顺时针10°。这个参数可以作为调整槽的角度的设计参数,而导向槽的设计角度一般要大于调整槽的设计角度,因此就会产生如图12所示的导向槽与调整槽的夹角。根据分析研究发现,这个夹角必须大于12°。进而可以得出导向槽的设计角度必须要大于22°。
座椅靠背角度设计正确与否,直接影响到乘员的乘坐安全性和舒适性。由于每个人的人体形态都不尽相同,所以座椅靠背角度和形状的设计就具有一定的难度。根据人体数模可以得到高靠背座椅的参数:靠背倾角范围取为105°~115°;高靠背座椅的高度应达到肩部,可取为530~560 mm,宽度为480 mm,坐垫倾斜角为6°~7°。
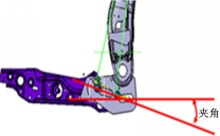
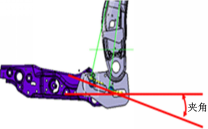
座垫下潜是汽车发生碰撞时的一种正常现象,当汽车发生追尾碰撞时,汽车刚性框架在推力的作用下向前运动,座椅和人体则由于惯性保持以前的状态,车体就会与人体和座椅产生一个如图13所示的夹角。这种惯性力会使座垫后端骨架向下变形,发生座垫后端下沉的现象。
根据NCAP新车评价标准,整车或者座椅生产商都会对座椅靠背角度变化和座垫防止人体下潜做相关实验。
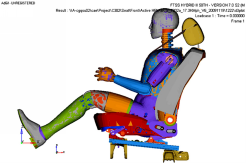
试验之前,首先要在台架上搭建好如图14所示的实验模型,即把假人模型以正确的坐姿安放在调好角度的座椅上,再给撞击台车一个合理的撞击波形。本次试验所用的座椅就安装了根据前文得到的优化参数设计的座椅座靠连接运动机构。试验分两次进行。
第一次试验时的试验条件大致有五项:第一为导向槽与调整槽的夹角为零;第二为座椅摆放位置(高度中间位置,前后中间位置),头枕也是中间位置;第三为撞击波形,采用的是FMVSS202A的17.3 km/h-8g;第四为固定形式,本次试验地脚未固定;第五为除了四连杆运动机构外,座椅靠背增加触发块。
第二次试验的试验条件在第一次试验的基础上有两处改动:导向槽与调整槽的夹角为12°;靠背下横梁增加了一个加强梁,如图15所示。试验数据采集使用的是拍照图片测量法。
(1)第一次试验
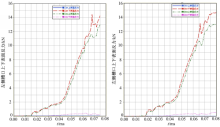
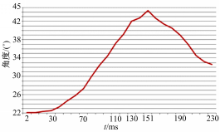
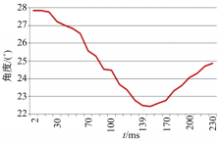
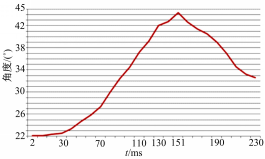
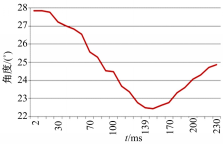
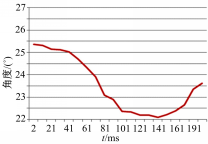
座椅座靠连接运动机构没有发生运动。座椅靠背偏转角度为22.23°,具体变化情况如图16所示;座垫下潜量为5.42,具体变化情况如图17所示。此外座椅靠背下横梁严重变形,如图18所示;且运动机构和座椅安全带支架产生干涉,如图19所示。
(2)第二次试验
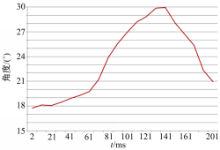
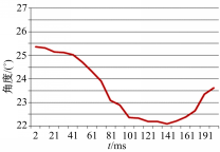
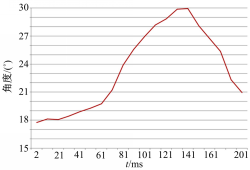
通过修改第一次试验的试验条件,第二次试验座椅座靠连接运动机构运动正常,只是左右略有不同步,有待进一步研究解决。座椅靠背偏转角度为12.21°,具体变化情况如图20所示;座垫下潜量为3.32 mm,具体变化情况如图21所示。
(1)运用四连杆转动瞬心原理设计的座椅座靠连接运动机构是可行的,并且在汽车发生追尾碰撞时有效地控制靠背偏转角度和座垫下潜量,从而对驾乘人员起到保护作用。
(2)本文给出的所设计的座椅座靠连接运动机构选用的具体参数为:槽口间隙为0.3 mm;采用等曲率槽口;滚子与槽口、销与滚子的摩擦因数分别为0.1和0.05,调整槽的设计角度为顺时针10°,导向槽的设计角度必须大于22°。
(3)试验中座椅座靠连接运动机构运动正常,只是左右略有不同步,有待进一步研究解决。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
 ek ek |
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|