

{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于模糊逻辑的信号交叉口人车冲突判别方法
[胡宏宇 , 李志慧, 魏巍, 曲昭伟, 陈正全]
, 李志慧, 魏巍, 曲昭伟, 陈正全]
, 李志慧, 魏巍, 曲昭伟, 陈正全]
|
|


胡宏宇(1982),男,讲师,博士.研究方向:智能交通,智能车辆.E-mail:huhongyu@jlu.edu.cn
利用视频图像处理技术提取交叉口人车冲突基本数据。采用冲突时间差和车辆速度两个特征对人车冲突安全性进行分析,并由此构建相应的隶属度函数,确定了人车冲突安全等级,设计了基于模糊逻辑规则的信号交叉口人车冲突判别方法。通过与人工判别结果对比,验证了本文方法的有效性,本文建立的基于模糊逻辑的人车冲突判别模型准确率超过85%。
Image processing technology was used to extract the basic data of pedestrian-vehicle conflict. Time Difference to Collision (TDTC) and the vehicle speed were selected as the features for pedestrian-vehicle conflict analysis. Based on the analysis, the corresponding membership functions of the two features are constructed to distinguish the safety level of the conflict. The proposed method is compared with of artificial discrimination. Results demonstrate that the proposed method is reliable and has good performance. The discriminating accuracy of the method is higher than 85%.
混合交通是我国交通的主要特点,即使在有信号控制的交叉口,行人也常常与机动车发生冲突。构建合理的交叉口人车冲突分析方法,是保障交叉口通行效率及通行安全的基本途径。近年来,国内外研究学者就交叉口人车冲突进行了相关研究并取得了一定的成果[ 1, 2, 3]。Ashton采用人车之间的碰撞速度来评价冲突的严重性程度[ 4];Hayward[ 5]提出了经典的碰撞预计时间( TTC),并以此作为判别交通冲突临界状态的指标。在 TTC概念的基础上,研究人员针对人车冲突问题,从不同的研究角度相继提出了行人过街冲突时间[ 6]、后侵犯时间[ 7]、安全减速时间[ 8]以及行人过街风险指数[ 9]等以冲突时间为评价指标的冲突辨识模型。Zhang等[ 10]提出了基于冲突时间差( TDTC)的混合交通条件下人车冲突辨别方法,通过试验表明:该方法在评价行人安全的应用中取得了较好的效果。
由于影响人车冲突严重程度的因素较多,难以用模型精确量化,且人车冲突是一个复杂的变化过程,安全、危险的概念本身是模糊的,冲突情况不同,危险程度也不同。因此本文基于模糊理论,利用视频图像自动处理技术提取行人、机动车运动轨迹,对人车冲突安全性进行判别和分析。
本文以典型四相位信号交叉口为例进行人车冲突情形分析。在进口道处由于信号配时中较少设置专用右转信号相位,故右转机动车与过街行人发生冲突的情况较多;在左转车流放行时,理论上行人是不被允许通过交叉口的,但是行人往往难以接受过长的红灯等待时间,寻找对向左转车可穿越间隙违章过街,由此导致冲突发生;而在出口道位置,源自相邻进口道的右转车流与过街行人的冲突发生频次也较高,另一相邻进口道的左转车流通过该处人行横道时也会与行人发生冲突,危险性较大。
由于行人比车辆要小得多,当一个车辆通过,尽管行人没有侵占通行权,但行人仍将被影响(或处于危险中)。尽管行人没有在车辆的前方,这个行人仍可能处于危险中。因此,为了分析人车冲突相互影响的过程,本文引入冲突时间差[ 10]( TDTC)作为人车冲突的安全评价指标。该参数的定义为:如果行人、车辆保持速度不变,他们到达潜在冲突点的时间差。其中潜在冲突点是行人与车辆运行轨迹的交点。 TDTC可以被表示为:
TDTC p, v(t)=T p(t)-T v(t) (1)
T p(t)= | (2) |
T v(t)= | (3) |
式中:L为坐标位置; 
TDTC可以是大于零或小于零的数。如果 TDTC大于零意味着车辆先到达潜在冲突点;如果 TDTC小于零则意味着行人先到达潜在冲突点。 TDTC越接近于0,表明冲突越严重,行人的危险程度越高。为了显示人车相互影响的整个过程,本文将临近冲突前的时间划分为若干间隔,分别测量其 TDTC值,若 TDTC值连续处于判别阈值范围内,则表明人车冲突严重程度更大。同时由于 TDTC参数是一个相对的值,单纯依赖它不能精确地评价人车冲突的严重性。例如,如果行人和车辆都以很小的速度并朝着同样的位置运动, TDTC值也会很接近0,而行人的危险程度却没有那么高。因此,需要结合其他指标进行评价。本文结合人车相对速度参数进一步判别。但由于实际情况行人速度相对车辆速度来说很小,因此行人速度可以忽略。进而选取车速参数与临近冲突前连续 TDTC参数值进行人车冲突严重程度的判别。
本文基于模糊理论,利用Matlab模糊逻辑工具箱实现人车冲突判别。通过建立模糊逻辑规则预测可能出现的人车冲突情况。该规则包括两个输入变量:
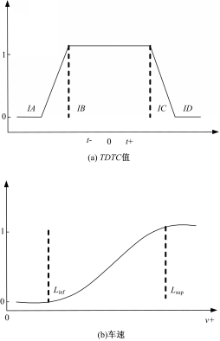
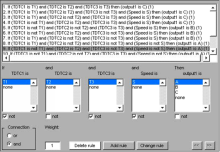
(1) TDTC值。利用一个梯形函数获得具有模糊概念的“接近0的 TDTC值”的隶属程度 w0,如图1(a)所示。根据文献[10]对 TDTC值的观察,当 TDTC值落入[-1,0.5]s时,行人的危险程度会很高。而人车冲突的发生往往是一个过程,不仅仅限于一个时间点,当 TDTC值在接近0的一个时间范围内,人车冲突的危险性都是很高的;当 TDTC值远离0时( TDTC→±∞),人车冲突的危险程度降低。因此,采用如图1(a)所示的梯形函数对 TDTC值进行模糊化,其中IA,IB,IC,ID为梯形函数的控制阈值参数。
(2)车速值。使用一个S型函数来表示模糊概念“很快”的隶属度( w1),如图1(b)所示。当车速变快,超过指定阈值时,即使 TDTC值未在危险范围内,人车发生冲突的可能性依然很大。因此用阈值参数 Lsup、 Linf来控制车速过快或过慢所产生的冲突严重程度。这里采用S型函数对车速参数进行模糊化控制。
 | 图1 人车冲突判别模型中变量的隶属度函数Fig.1 Membership functions of parameters in the model |
基于该判别模型的模糊逻辑规则,输出变量为人车冲突的等级。本文将人车冲突安全等级分为3个等级。通过视频处理软件获得关键时刻(冲突双方其中一方先到达潜在冲突点的时刻)以及关键时刻之前两个采集时刻的数据,及获得3个连续时刻的 TDTC值,即 TDTC1, TDTC2, TDTC3。并提取这3个时刻的最大速度,作为速度评价参数。如果3个连续的 TDTC值都处在危险区域外,该事件就是安全的(等级A);如果1或2个 TDTC值落入危险区域,则需进行车速判别。如果车速相对较慢,该事件是可能危险的(等级B)。但如果车速很快,或者 TDTC连续落入危险区域,车辆、行人相撞的几率非常大,该事件是非常危险的(等级C)。
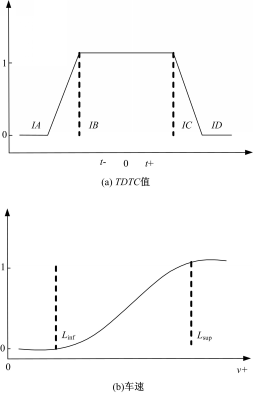
依据上述判别思想,可相应构建14条模糊逻辑规则,模型基于这些规则实现对人车冲突安全等级的辨识,如图2所示。输出变量output的论域为[1,3],冲突安全等级判别函数为:
Conflict_level=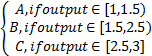 | (4) |
 | 图2 人车冲突判别模糊逻辑规则Fig.2 Fuzzy logic rules of pedestrian-vehicle conflicts |
本文选取长春市人民大街与自由大路四相位信号交叉口为研究对象,利用摄像机在高处对交叉口人车冲突过程进行拍摄。在数据采集过程中,本文利用课题组研发的混合交通运动轨迹跟踪分析软件进行参数提取,较之传统人工数据采集方法大大节省了采集时间。在数据提取过程中,以行人、车辆为质点,将行人两脚中心坐标作为行人所在位置,将车头中心坐标代表车辆位置,由此获得人车运动轨迹坐标及各自速度。视频图像采集时间间隔为0.04 s,每10帧图像(0.4 s)采集一次数据。图3为混合交通运动轨迹跟踪分析软件截图。
 | 图3 混合交通运动轨迹跟踪分析软件Fig.3 Object trajectory analysis tool for mixed traffic |
为了验证本文算法的适用性,将本文算法判别结果与人工判别结果进行了对比。人工评价的数据来源于30位自愿观察者,其均为非专业人士。首先对观察者进行训练、讲解人车冲突相关知识,以便观察者能做出正确的判断。观察者需要把冲突事件划分为A,B,C三个等级。等级A代表安全的人车冲突事件;等级B相对危险一些;等级C代表最危险的人车冲突事件。安全等级由多数人投票得分决定。他们要观察所有事件,并区分危险和安全的人车冲突事件。然后对冲突程度进行投票。如果多数投票集中在两个等级中,那么安全等级为两者中更危险的一级。本文共记录人车冲突有效事件48起,其中,等级A事件20起,等级B事件25起,等级C事件3起。
另外,在进行算法验证之前,需要对两个模糊规则隶属函数的控制参数针对实际的交叉口数据进行设定。根据文献[ 10],大多数 TDTC值落入[-1,0.5] s时,行人的危险程度均很高,且当车辆速度超过30 km/h时,距车较近的行人十分危险。本文依据交叉口实际运行情况,结合对比分析法(将提前采集到的25组先验人车冲突相关数据以本文提出方法和人工评价的方法得出结果进行对比)经过对隶属函数参数的修改,使得人车冲突正确率最大。此时,控制 TDTC的梯形函数的4个控制阈值IA,IB,IC,ID分别取-1.4 s,-1 s,0.5 s,0.9 s;速度函数的阈值参数 Lsup=25 km/h、 Linf=10 km/h。基于模糊逻辑规则的人车冲突判别过程如图4所示。
 | 图4 人车冲突模糊判别过程Fig.4 Progress of pedestrian-vehicle conflict discrimination using the fuzzy logic tool |
表1为本文方法与人工判别方法的结果对比,可以发现本文方法准确率在85%以上。其中,针对等级A的冲突,有3个冲突被模型判定为可能危险。这是由于冲突车辆为大型车辆,人工观测过程观测者普遍认为可能存在危险,但本文算法模型并没有考虑车辆尺寸的大小对行人安全性的影响。
| 表1 基于模糊逻辑的人车冲突判别结果 Table 1 Pedestrian-vehicle conflict discrimination results based on fuzzy logic |
表2为利用本文方法统计的左转、右转、直行三种车辆与行人冲突程度情况。可以发现,右转车与行人发生冲突的情况较多,因为右转车辆不受信号控制、约束力小、经常会与行人发生冲突。但右转车一般都能以低速通过交叉口,使得发生严重危险的概率降低。在左转车流放行时,行人有时不考虑信号灯控制,随意通过交叉口,导致与左转车发生冲突。当行人与左转车抢行时,发生危险的概率大大增加。同样的情况在相邻进口道直行车放行时也会发生,行人违章过街,在车流中穿行,由于直行车速度较快,导致行人发生严重危险的概率明显增大。
| 表2 不同流向车辆与行人冲突情况 Table 2 Conflict discrimination results between pedestrians and vehicles in different directions |
以交通冲突技术理论为基础,采用 TDTC和车速作为人车冲突判别模型的判别指标;同时基于模糊控制原理,构建了相应的变量隶属度函数与模糊规则,以此构建基于模糊逻辑的人车冲突判别模型。在人车冲突数据采集过程中,利用课题组研发的混合交通运动轨迹跟踪分析软件进行参数提取,较之传统人工数据采集方法大大节省了采集、处理时间。通过实际交叉口采集数据验证了本文方法具有较好的适用性和较高的识别精度。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|