
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
压机的调平和跟踪控制
[吴爱国 , 杨硕, 张涵, 李长滨]
, 杨硕, 张涵, 李长滨]
, 杨硕, 张涵, 李长滨]
|
|


作者简介:吴爱国(1954-),男,教授,博士生导师.研究方向:非线性系统的控制算法及应用. E-mail:agwu@tju.edu.cn
针对多缸锻造液压机系统,在考虑不确定大负载和多缸耦合的情况下建立了非线性系统数学模型。采用广义逆的控制分配方法解决液压缸过驱动问题,进而提出一种二级非线性控制器设计方案。该控制器内环级采用李雅普诺夫直接法控制4个单输入单输出的液压缸压力系统,实现对期望压力的精确快速跟踪;外环级则针对带不确定大负载的多输入多输出系统,采用自适应控制策略并结合控制分配理论获得各缸期望压力。仿真和实验结果表明,该控制策略优于采用滑模变结构方法的单控制器策略,实现了低速运行下的高精度调平和跟踪控制。
A nonlinear mathematic model for multi-cylinder forging hydraulic press system is established, in which the uncertainty of large load and the coupling of multi-cylinder is taken into consideration. The over actuation of the hydraulic cylinder is solved using control allocation method based on generalized inverse. Then a two-level nonlinear controller is proposed to solve the above problems. Employing Lyapunov Direct Method, the inner-loop controller controls the four SISO hydraulic cylinder pressure system to achieve accurate and fast tracking for the desired pressure. To control the uncertain large load MIMO system, the out-loop controller is designed using adaptive control strategy, with reference to the control allocation theory, to obtain the desired pressure of each cylinder. Simulation and experiment demonstrate that the strategy proposed is better than the sliding mode variable structure control strategy with single controller, and high-accuracy of the leveling and tracking control under slow running can be achieved.
存在强耦合的多缸锻造液压机系统同时会受到大负载扰动、液压系统及元件等非线性因素的影响,当液压缸数超过滑块运动自由度3时,会出现过驱动问题。传统的线性控制技术[ 1, 2]无法在如此恶劣的条件下获得满意的调平和跟踪控制精度。针对有未知负载的液压伺服系统,文献[3-4]使用的反步自适应递推法存在“计算膨胀”的问题。文献[5]针对多缸锻造液压机系统,采用分散滑模控制方法,重点解决了系统耦合问题,但是所建立的数学模型中存在非独立变量,并且滑模控制[ 6]设计过程复杂,并伴随有抖振现象[ 7, 8]。文献[9]研究了多缸同步提升系统,尝试使用二级控制器的设计思路。
在文献[9]研究的基础上,作者对四缸锻造液压机进行具体的建模和控制研究。首先,选取滑块3个方向的运动自由度和液压缸的压力作为独立变量,建立系统的数学模型,并且引进控制分配理论[ 10, 11, 12]来分析液压缸过驱动问题,使各液压缸得到最优压力分配。其次,在控制分配的基础上,设计二级控制器。该控制器的内环级采用李雅普诺夫直接法控制4个单输入单输出的液压缸压力系统,实现对期望压力的精确快速跟踪;外环级则针对带不确定大负载的多输入多输出系统,通过采用基于李雅普诺夫理论的自适应控制策略并结合控制分配理论获得各缸的期望压力。最后,通过仿真和实际运行,并与滑模变结构方法进行对比,验证了本文控制策略的可行性和有效性。
四缸锻造液压机的下压过程如图1所示。首先,定量泵提供油压,经过比例伺服阀的开口大小控制活塞缸上腔压力,然后推动滑块下压,同时使滑块的运行满足竖直方向的位移跟踪和水平方向的调平精度指标。
 | 图1 四缸锻造液压机系统Fig.1 Four-cylinder forging hydraulic press |
实际工程中液压缸下腔压力恰好抵消活塞顶杆与滑块的总重量,在滑块的三个自由度方向上,根据牛顿第二定律和刚体定轴转动定律可得滑块的动态模型:

式中: F1、 F2、 F3、 F4为液压缸的驱动力; FL为负载力; φx为滑块绕 X轴的转角; φy为滑块绕 Y轴的转角,两个转角均以转向轴 Z轴正方向为正; M为滑块质量; xc为滑块质心的位移量; lx、 ly分别为驱动力到 X轴和 Y轴的距离; rx、 ry分别为负载力到 X轴和 Y轴的距离,其取值可正可负,它的符号取决于负载力的位置; Jx、 Jy分别为滑块绕 X轴和 Y轴的转动惯量。
对液压缸的活塞进行受力分析,4个活塞杆的质量相等,液压缸黏性阻尼系数近似为零,其负载力平衡方程和流量方程分别为:
式中: i=1,2,3,4; Pi为第 i个液压缸上腔油压; Ai为第 i个液压缸活塞面积; m为活塞杆质量; xi为第 i个液压缸活塞缸与滑块接触点的位置; qi为油的流量; Vi为油腔容积; Ey为等效容积弹性模数。
比例伺服阀的流量方程为:

式中: Cd为比例伺服阀阀口流量系数; Ps为伺服阀的供油压力; ui为比例伺服阀阀口面积; ρ为油液密度。
综合式(1)~(4)可以得到锻造液压机系统的模型为:
式中:
Lf= 
X1= 
X2= 
X= 

H=diag( M, Jx, Jy)
B= 
Df= 
Rd= 
由模型(5)可知,该液压系统是一个复杂的非线性系统,具有耦合、模型不确定性和液压缸过驱动问题,从而难以直接求得满足指标的控制器,并且锻造液压机的不确定负载力最大可达8×106 N,大负载进一步增加了控制的难度,所以必须使用新型、高效的控制算法来满足低速运行下的滑块调平精度和跟踪性能要求。
液压缸的数量超过负载运动的自由度,即液压缸数量大于3时,便会产生液压缸过驱动问题。过驱动问题是锻造液压机系统能否进行分级控制的最关键问题,该问题与冗余性问题相似,在航空、航海、汽车等领域遇到的冗余性问题,称之为控制分配问题,文献[10-12]提出了一些行之有效的分配算法,这些控制分配算法为合理解决液压缸冗余问题开辟了新思路。
液压缸过驱动问题的表现形式为:
式中: Vd= 
为了节省能量,希望各液压缸出力最小,即得到 Rd的最小二范数解,增加约束条件min( 
Rd除以液压缸的活塞面积可以得到期望的油液压力 P1 d、 P2 d、 P3 d、 P4 d。本文以四缸液压机为例进行分析,但从分析过程可知,无论液压缸的具体数目是多少,都可以采用控制分配解决系统的过驱动问题,使每一个液压缸的油液压力得到合理的分配。
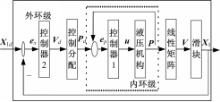
控制分配解决了液压缸的过驱动问题,从而使多缸锻造液压机系统得以分解为二级控制系统,其系统框图如图2所示。
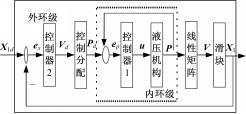 | 图2 多缸锻造液压机二级控制系统Fig.2 Two-level control strategy of multi-cylinder forging hydraulic press |
按照多级控制系统先内环后外环的一般原则,由内环开始,逐步向外扩展。本文则应先设计内环级控制器,然后设计外环级控制器。
液压机构的动态特性为:

由式(8)可知,液压机构呈现明显的非线性特性,采用李雅普诺夫直接法设计控制率,使得一级控制系统具有优良的跟踪性能。
期望压力为 Pid,误差为 

设李雅普诺夫函数为:
设计由前馈控制和反馈控制组成控制率:
式中: ki>0,将控制率(12)和开环误差系统(9)代入式(11)可得:
由式(13)可知跟踪系统在李雅普诺夫意义下是稳定的,其动态性能可由反馈系数 ki进行调节。由式(9)和式(12)可知压力误差以指数形式快速收敛到零。
内环级压力跟踪控制系统响应快,对外环基本无影响。则外环级动态模型为:
式中: V= 

式中: Df1为未知负载力,故该对象存在不确定性,为了获得可靠的系统性能,采用基于李雅普诺夫直接法的自适应控制。位移的期望值为 xcd,跟踪误差为 



式中: k10和 k11为正常数。
将式(16)代入式(15),可得到按指数形式收敛的闭环误差动态为:

若定义组合跟踪误差 s1 = 

该自适应控制系统的稳定性和未知参数的估计可以用李雅普诺夫理论分析,取李雅普诺夫函数为:
其中正常数 γ1为自适应增益,易知其导数为:
则参数估计值为

由Barbalata引理,易知 s1收敛到零,由组合跟踪误差的定义可知 s1收敛到零蕴含着位置误差和速度误差都收敛到零。
同理可得 φx、 φy跟踪 φxd、 φyd的控制,则外环级控制器和参数估计为:
式中:负载的估计值 






式(7)(12)(22)便构成了锻造液压机系统的二级控制器。
系统的控制性能要求如下,滑块中心点的期望位移 xcd为:

滑块应尽可能保持在调平状态,即 φxd=0, φyd=0。调平精度指标为0.1 mm/m,即 

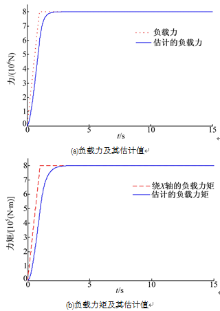
 | 图3 负载力和负载力矩的估计Fig.3 Load estimation and load torque estimation |
仿真时选择合适的自适应增益,获得负载力和负载力矩的自适应估计值,如图3所示。对于锻造液压机的不确定负载,上述估计算法估计效果良好,当反抗力恒定之后,估计值基本无偏差。
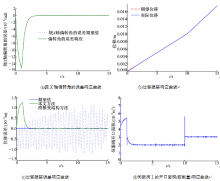
系统的调平效果如图4(a)所示,其最大偏差小于1.6×10-5 rad,是实际控制指标的六分之一,调节时间为3 s,实现了滑块的高精度、快速调平。系统的给定位移和跟踪性能如图4(b)所示,位移跟踪误差如图4(c)所示,虚线为滑模变结构控制方法的控制效果,其精度基本在1×10-4m以内,精度可以满足控制指标要求,但是抖振现象特别明显,不利于系统的稳定。实线为本文方法,过渡时间短,并且运行到2.5 s时跟踪误差为零,实现完全稳定跟踪,在10 s时,给定速度由0.001 m/s变化为0.0015 m/s,两种方法都有较强的鲁棒性。综上可知系统在低速、变速情况下,本文方法优于滑模变结构控制方法。图4(d)为系统的控制量,即伺服阀开口面积,图中为伺服阀1的响应曲线。
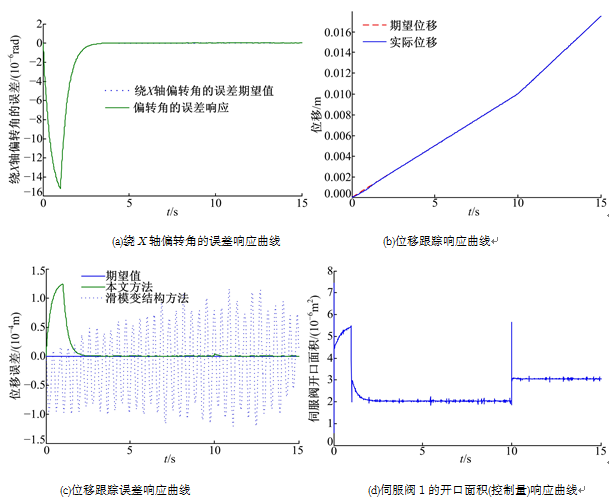 | 图4 有未知负载力时系统的响应Fig.4 System response under uncertainty load |
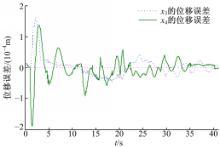
实际的锻造液压机系统参数如表1所示,并且锻造液压机上的位移尺的测量误差为0.001 mm。根据滑块尺寸和调平精度要求,控制指标等价为滑块四角的位移跟踪误差的绝对值小于0.175 mm。图5为锻造液压机实际运行时滑块两个角的位移误差曲线,滑块下行速度为0.001 m/s,1 s前为空载运行,之后为压制运行,接触负载之后位移误差增加,经过约0.3 s的调节,位移误差的绝对值就小于0.175 mm,随后的压制过程中误差基本稳定在0.090 mm以内。说明系统具有快速调节能力,鲁棒性好,调平和跟踪误差小,满足了工程指标。因此,本文的控制策略是有效的。
| 表1 多缸液压机相关参数的取值 Table 1 Parameters of multi-cylinder hydraulic press |
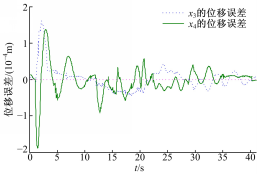 | 图5 实际位移误差响应Fig.5 Response of actual displacement error |
本文建立了多缸锻造液压机的数学模型,应用广义逆的控制分配理论解决了过驱动问题。此外,该系统二级控制器分别采用李雅普诺夫直接法和自适应控制方法设计,与采用滑模变结构方法的单控制器相比,结构清晰,计算简明。并且能保证系统不存在抖振现象,提高了控制精度,增强了稳定性。通过仿真对比实验和实际运行,验证了该二级控制器的优势和实用性,能够保证多缸锻造液压机系统快速、精确、稳定的运行。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|