



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
渠化可变导向车道交叉口预设信号配时优化模型
[李丽丽1  , 姚荣涵
, 姚荣涵2 , 周红媚2 , 王鹏飞2 ]
, 姚荣涵, 王鹏飞|
|


作者简介:李丽丽(1979-), 女, 副研究员, 博士.研究方向:交通组织设计.E-mail:lilili@bjjtxy.bj.cn
为了充分利用渠化可变导向车道交叉口的时空资源,建立了以交叉口车辆总延误最小为优化目标、以可变导向车道功能和相位有效绿灯时间为决策变量的预设信号配时优化模型。使用交通仿真软件VISSIM对本文模型进行了模拟验证。结果表明,可变导向车道功能和相位有效绿灯时间存在最佳组合,这种组合能使各股车流的车均延误最小、各进口道的平均排队长度和最大排队长度最短。为了进一步考虑多时段信号控制问题,提出了渠化可变导向车道交叉口多时段预设信号配时设计流程。研究成果能够合理地设定信号交叉口任一时段可变导向车道功能与信号配时方案,可以有效地提高交通流运行效率,为可变导向车道控制提供理论依据与方法。
To fully utilize the time-space resources of an intersection with reversible approach lanes, an optimization model was developed for pretimed signals. The objective of this model is to minimize the total delay for all vehicles. The decision variables are the function of each reversible approach lane and the effective green time per signal phase. This model was validated by a case using the traffic simulation software VISSIM.The results indicate that there is an optimal combination of the two variables by which the average delay per vehicle for each movement, the average queue length and the maximum queue length on each approach can be minimized. To further consider the multi-period signal control, the procedure of the multi-period pretimed signal timing design for an intersection with reversible approach lanes was proposed. The research achievement can reasonably allocate the function of each reversible approach lane and the signal timing scheme during any time period for a signalized intersection, effectively improving the operation efficiency of traffic flow and providing a theoretical basis and method for the control of reversible approach lanes.
可逆车道主要用于解决路段上双向交通流分布不均衡带来的交通拥堵和车道闲置问题。Wolshon和Lambert[1]调查和分析了可逆车道系统的工程实践情况, 总结了可逆车道的应用范围, 并讨论了现实中应用可逆车道的多样性。根据启用可逆车道的建议, Liu等[2]建立了确定可逆车道数的优化模型, 并且从安全、运营和通行能力角度测试了可逆车道系统的可靠性。2007年, 美国亚利桑那州菲尼克斯市的民众对高峰小时内主干道上可逆车道的未来发展提出争议。Golub[3]为此进行了一项调查, 并给出了企业、行人、驾驶员和居民对于可逆车道的感知费用-效益的调查结果。此外, 还有一些学者研究可逆车道对路网运行性能的影响。张好智和高自友[4]针对城市交通流的潮汐特点提出了双向流量不平衡道路的车道调整方法, 并建立了离散双层规划模型。张鹏等[5]利用双层规划方法建立了可变车道条件下的路网备用容量模型, 并分析了车道分配对路网容量的影响。
可变导向车道主要用于解决交叉口各流向交通流分布不均衡带来的交通拥堵和车道闲置问题。针对可变导向车道的研究, 大多集中于实施可变导向车道条件下的信号配时方案设计, 同时讨论与之配合的交通标志、标线的设计。曾滢等[6]基于信号控制交叉口时空关系建立了动态车道功能与信号相位组合模型。针对信号控制交叉口进口道设置可变车道的情况, 本人所在课题组曾提出基于双停车线的主、预信号定时控制方法[7]以及基于检测器数据的可变车道属性动态控制方法[8]。蒋应红和保丽霞[9]针对交叉口附近车道的交通流不对称性分析了可变车道设置方法, 并提出了可变标志板延后起亮和提前关闭时刻的计算方法, 采用二次排队长度、通行能力、延误等指标对可变车道的利用率进行了综合评估。傅立骏等[10]通过分析影响可变车道属性的因素, 以实时交通流量数据为基础, 提出了一种基于动态交通流量的可变车道自适应控制方法。此外, 周立平和董红利[11]针对信号交叉口提出转向可变车道概念, 然后分析了转向可变车道的设置原则与条件, 最后建立了转向可变车道长度计算模型。
鉴于以上分析, 本文在已有研究的基础上针对渠化可变导向车道的交叉口提出一种预设信号配时优化模型, 该模型以交叉口运行性能指标最优化为目标, 根据不同时段的交通需求优化可变导向车道功能以及相应的相位设计方案和配时参数。
在交叉口进口道, 可变导向车道定义为车道功能不固定的车道, 定义车道功能不变的传统车道为固定导向车道。如前所述, 当交叉口交通流分布具有明显潮汐特性时, 可以采用可变导向车道控制方式调节交通流分布, 使其达到均衡状态。
本文不考虑交叉口设置左转短车道或左弯待转区的情况。假设所研究交叉口在高峰时段内采用定时信号控制方式; 某进口道早高峰时单车道左转流量明显大于单车道直行流量, 而晚高峰时单车道直行流量明显高于单车道左转流量。如果所研究交叉口某进口道交通流明显具有这种潮汐特性, 那么可以在该进口道上设置可变导向车道。这里认为车流与车道组一一对应, 将某股车流所能使用的所有车道称为该股车流对应的车道组。另外, 在进口道设置可变导向车道需要满足两个条件:①进口道车道数为3条或3条以上; ②左转车流与直行车流分别由独立的信号进行控制。
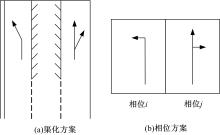
如图1(a)所示, 以含3条车道的进口道为例, 内侧车道为左转车道, 外侧车道为直右车道, 中间车道设为可变导向车道, 该车道随着交通流分布的变化可以让车辆直行或左转。这里假设右转车流比例较小。当左转流量明显高于直行流量时, 可变导向车道指示的行车方向为左转; 反之, 可变导向车道指示的行车方向为直行。如图1(b)所示, 该进口道的左转车流与直右车流在不同的相位内通行, 其通行顺序可以先左转后直行, 也可以先直行后左转。当研究整个交叉口时, 需要考虑与其他进口道各股车流之间的关系, 统筹考虑交叉口的相位相序设计方案。
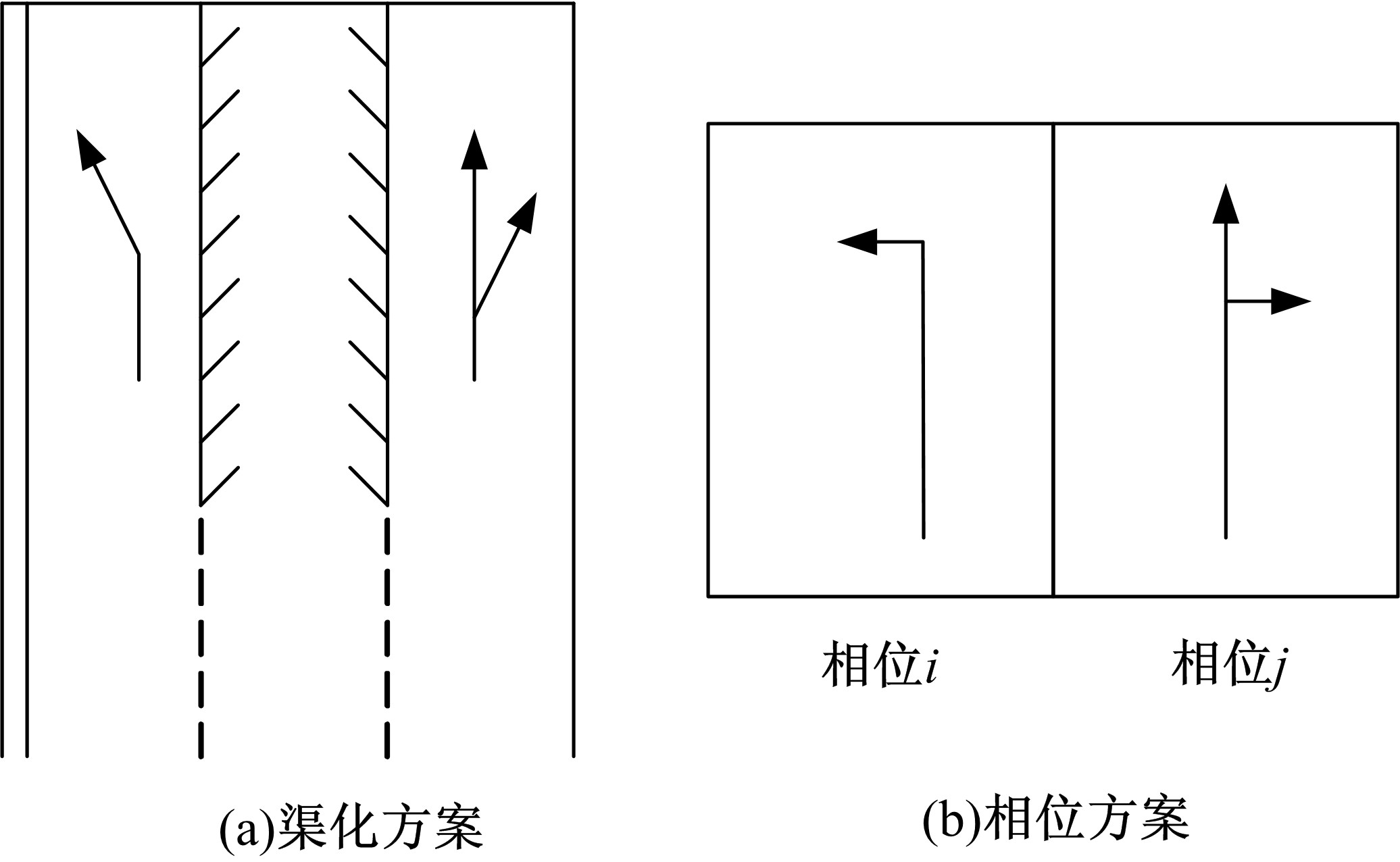 | 图1 可变导向车道设置方案Fig.1 Setting scenario of a reversible approach lane |
基于以上基本假设, 根据交叉口交通流分布, 各进口道都有可能设置可变导向车道。因此, 交叉口可能存在1条或1条以上的可变导向车道。
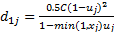
在信号控制交叉口, 当存在可变导向车道时, 一条车道组的饱和流率为:

式中: 









这里还需定义可变导向车道功能唯一性约束数对 




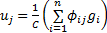
由一条车道组的饱和流率可得该车道组的通行能力为:

式中: 










根据美国《道路通行能力手册2000》[12], 一条车道组的车均延误为:

式中: 














对进口道上每条车道组的车均延误进行集计处理, 可得交叉口车辆总延误为:
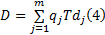
式中: 

对于每一股车流, 车道组有效绿灯时间应大于或等于最小绿灯时间, 即:
式中: 
这里车道组有效绿灯时间是指在一个信号周期内该车道组对应车流能够有效通行的绿灯时间。
对于交叉口, 所有相位有效绿灯时间之和加上一个信号周期内的总损失时间即为信号周期时长。根据文献[12], 这一信号周期时长应在临界的上、下限之间, 即

式中: 

相位有效绿灯时间应为非负数, 即

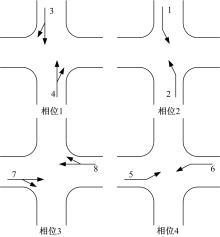
图2(a)为一个含可变导向车道的典型交叉口的渠化方案, 图2(b)为该交叉口的相位方案, 图中数字表示车流编号。
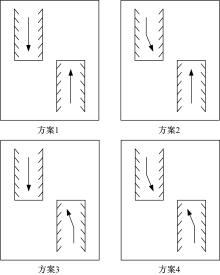
以该图所示交叉口为例, 高峰小时内该交叉口各进口道各流向的流量如表1所示。由图2可见, 该交叉口北进口道和南进口道的中间车道均为可变导向车道, 其车道功能在左转和直行之间进行切换。这两条可变导向车道的功能属性有四种组合方案, 如图3所示。
| 表1 交叉口各流向流量 Table 1 Traffic volume for each movement at intersection |
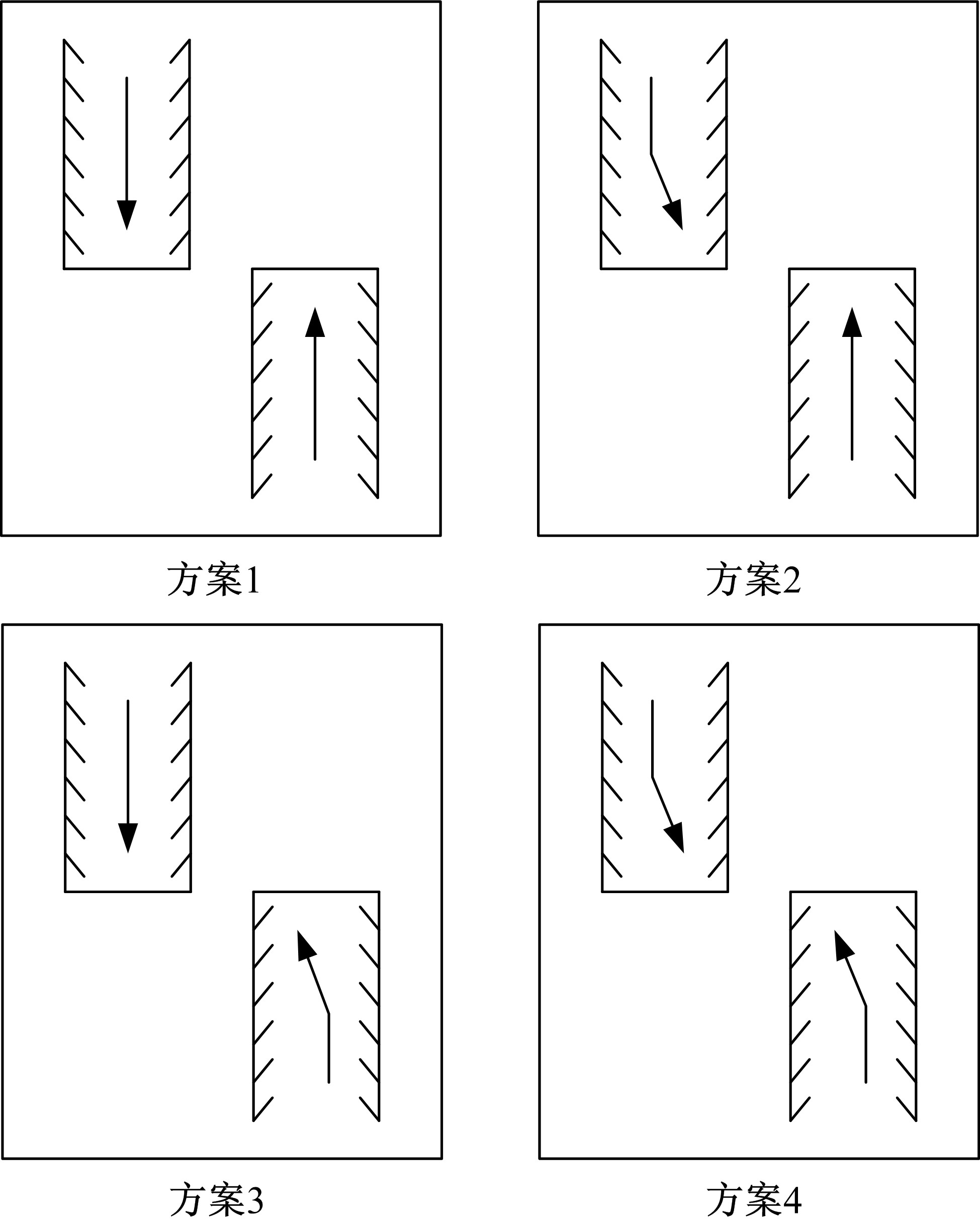 | 图3 可变导向车道功能组合方案Fig.3 Combination scenarios of functions of reversible approach lanes |
针对图3所示各方案, 使用本文所建立的优化模型计算使交叉口总延误最小的信号配时参数及其相应的性能指标, 所得结果如表2所示。从表2中可以看出, 当北进口道可变导向车道为直行、南进口道可变导向车道为左转时, 按图2(b)所设计的四相位配时方案的最佳周期时长较其他三种方案短, 总延误和车均延误都最小, 饱和也最低, 且低于1, 交叉口通行能力第二大。因此, 方案3是该高峰小时内的最优方案。
| 表2 不同方案对应的最佳配时参数及性能指标 Table 2 Optimal signal timing parameters and performance indices under different scenarios |
为了进一步说明模型优化效果, 使用交通仿真软件VISSIM对交通流运行状况进行模拟, 采用多步运行模式, 仿真时间为3600 s, 运行次数为5。表3给出了不同方案下交叉口各流向车流的车均延误。图4给出了不同方案下各进口道的平均排队长度和最大排队长度。
从表3可以看出, 当可变导向车道采用方案3时, 大多数车流的车均延误较其他方案低, 仅有南进口直行和右转车流的车均延误比方案4略高。从图4可以看出, 当可变导向车道采用方案3时, 各进口道平均排队长度和最大排队长度都比其他方案短。综合考虑, 该时段内可变导向车道功能及信号配时参数的最优组合是方案3。
| 表3 不同方案下各流向车流的车均延误 Table 3 Average delay per vehicle for each movement under different scenarios |
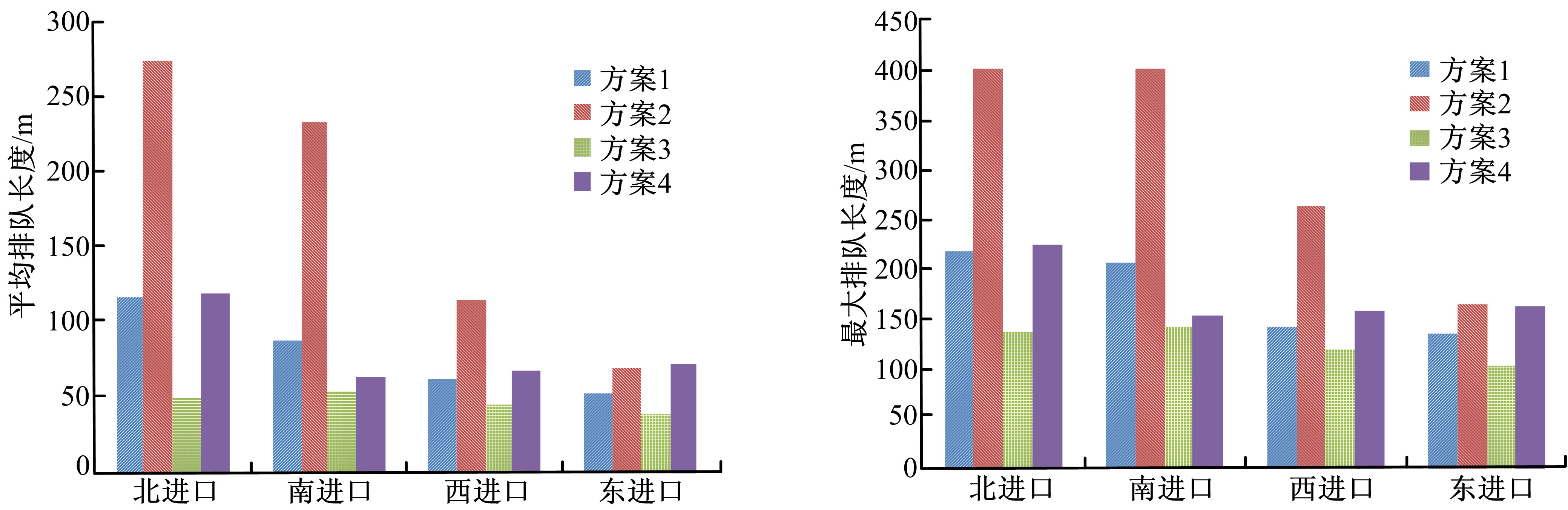 | 图4 不同方案下进口道平均排队长度和最大排队长度(a) 平均排队长度 (b)最大排队长度Fig.4 Average queue length and maximum queue length on each approach under different scenarios |
本文所建立的模型能够组合优化一个时段内可变导向车道功能和信号配时参数。然而, 一天内交叉口交通流分布及流量在不同时段内是不相同的。因此, 有必要讨论该模型在工程实践中的应用。这里假设交叉口采用多时段定时信号控制方式。以下为渠化可变导向车道交叉口预设信号配时设计流程:
(1)选定所研究的交叉口, 针对每一个进口道, 分析其左转车流量和直行车流量的变化规律, 当该进口道车道数在3条以上, 而且一天内左转车和直行车的流量分布具有明显的潮汐特性时, 将该进口道的一条中间车道渠化为可变导向车道。
(2)根据交叉口典型工作日的流量变化规律, 以各进口道各流向流量突变时刻为界, 将一日24小时划分为若干个信号控制时段。
(3)针对每一个信号控制时段, 根据交叉口交通流分布设计合适的相位相序方案[14], 并确定交叉口各可变导向车道功能的组合方案。
(4)针对每一个信号控制时段, 在每一种可变导向车道的功能属性组合方案下, 使用优化模型计算最佳的信号配时参数以及相应的性能指标。
(5)针对每一个信号控制时段, 选择能够获得最优的性能指标对应的可变导向车道功能组合方案和相应的信号配时参数作为该时段内可变导向车道功能和信号配时参数的最优组合。
在实际应用中, 可变导向车道标线必须与交通标志配合使用。当使用多时段定时信号控制方式时, 对于两个相邻的信号控制时段, 可变导向车道功能可能不同。对于这种情况, 可以在停车线后方设置预信号。此时, 需要考虑预信号与主信号的间距以及协调关系。这一问题将在后续研究中详细讨论。
针对渠化可变导向车道的信号交叉口, 提出一种以可变导向车道功能和相位有效绿灯时间为决策变量最小化交叉口车辆总延误的预设信号配时优化模型。为验证该模型的有效性, 使用交通仿真软件VISSIM设计了一个模拟案例, 并对模型使用进行了说明。模拟结果表明, 可变导向车道功能和相位有效绿灯时间在任一信号控制时段内存在一种最佳组合, 这种组合能够充分利用交叉口时空资源, 使各股车流的车均延误达到最小, 并使各进口道的车辆排队长度达到最短, 从而使交通流运行效率达到最优。最后, 为了说明该模型在工程实际中的应用, 还提出了多时段预设信号配时设计流程。本研究尚未考虑交叉口设置左转短车道或左弯待转区的情况。如果存在这样的情况, 而且某进口道交通流具有潮汐特性, 同样可以设置可变导向车道。但是, 此时需要考虑左转短车道或左弯待转区对进口车道(组)的影响, 后续研究将探讨更为复杂的可变导向车道设计与优化问题。研究成果能够最佳配置渠化可变导向车道交叉口的时空资源, 为分析更为复杂的可变导向车道设计与优化问题奠定基础, 并为可变导向车道控制提供理论依据与参考。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|