








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于实车试验数据的换道预警规则
[付锐1, 2  , 马勇
, 马勇1 , 郭应时1 , 袁伟1 , 孙浩1 ]
, 马勇, 郭应时|
|


付锐(1965-),女,教授,博士生导师.研究方向:道路交通安全技术.E-mail:furui@chd.edu.cn
为了使换道预警值的设定更符合我国驾驶人的驾驶习惯,以道路试验数据为基础,分析了换道时本车与周围车辆的相对速度和距离对换道行为的影响,确定了不同速度级别下允许驾驶人执行换道操作的安全间距。研究了驾驶人取消换道和执行换道操作行为的不同特征,探讨了驾驶人对于危险判断的主观依据。最后,提出不同速度级别下针对本车周围车辆条件的预警规则,并进行了验证。结果表明:道路试验中针对周围车辆的预警比例与实际情况基本相符,提出的预警规则可行。
In order to set the lane change warning parameters being more suitable to the characteristics of domestic drivers, the influences of relative speed and distance between the subject vehicle and its neighboring vehicles on the lane change behavior are investigated using road experiment data. Then the safety distance that allows the driver to perform the lane change operation under different speed levels is determined. Besides, to identify the driver's subjective basis for risk assessment, different characteristics of the driver in cancelling and performing lane change are analyzed. Finally, the warning rules for the neighboring vehicles in different speed levels are proposed. The results show that the warning proportion in the road experiments is basically consistent with the actual situation, which demonstrate the feasibility of the proposed warning rules.
研究表明[1], 驾驶人只要在碰撞危险前0.5 s得到“ 预警” , 就能避免50%的碰撞事故; 若在1 s前得到“ 预警” , 则可避免90%的事故发生。预警规则建立就是在一个悖论中寻找一个最优折中点, 即避免所有可能的碰撞, 同时不干扰驾驶人的正常操作, 因而预警值的设定对预警系统实用性和预警准确率的影响尤为重要。在设定预警值方面, 国外基于道路试验进行了相关分析, 并多采用即将碰撞时间TTC(Time-To-Collision)作为预警参数。van Dijck等[2]经过研究得出驾驶人主观可以接受的安全极限是TTC为3 s或者与目标车辆的距离为5 m, 超过这个极限驾驶人均会认为危险, 不会采取换道措施或者取消换道行为。Hirst等[3]认为, 驾驶人接受的安全极限可以为TTC等于4 s, van der Horst[4]建议TTC预警时间设置为3 s或者更小, 尽管这样可能导致更多的误警。Bogard等[5]提出了向左、向右不对称的换道预警系统。TTC值可以综合反映两车之间的距离和相对速度, 准确表达后方车辆接近本车的特征, 然而对于两车之间相对速度接近于零而距离较小的情况, TTC无法正确反映其换道安全性。此外, 当本车车速不同时驾驶人的换道行为特征也有差别, 速度越快, 驾驶人的脑力负荷(Mental workload)越大, 感受到的压迫感越强, 因而对于换道安全性的要求可能会越高[6]。国内研究多根据车辆换道轨迹推导出本车与周围车辆发生碰撞时的临界点, 从而建立换道安全距离模型, 进行仿真分析后得到预警值[7]。杨双宾[8]建立了高速公路上本车与周围车辆最小安全距离模型, 并进行了Matlab仿真分析。王荣本等[9]在分析车辆换道过程中运动学关系的基础上, 提出了安全换道模型。王文霞[10]对换道行为的影响因素和车辆换道的运行特性进行了分析, 提出了最小安全距离模型, 并进行了模型验证。
参考安全距离预警模型, 并利用实车试验数据可以获得更符合我国驾驶人特点的换道预警规则[11]。然而, 目前国内对于这方面的研究还比较少, 本文通过分析不同速度条件下本车与周围车辆的相对速度和距离对驾驶人换道行为的影响, 确定不同速度条件下允许驾驶人执行换道操作的安全间距; 同时研究执行换道与取消换道的不同特征, 探讨不同驾驶人主观判定危险状态的界限, 最后提出一个更符合国内驾驶人特点的安全预警规则, 从而提高预警系统的适应性, 在避免碰撞的前提下减小误警率。
1.1.1 被试驾驶人
试验共选取20人作为被试驾驶人, 平均年龄为40.6岁, 标准偏差为7.17, 其中最大年龄50岁, 最小27岁; 驾驶人平均驾龄为14.6年, 标准偏差为8.62, 最长驾龄为30年, 最短为2年。按文献[12]将驾驶人分为熟练与非熟练两种, 驾驶里程0~5万公里为非熟练驾驶人, 5万公里以上为熟练驾驶人, 熟练与非熟练驾驶人各有10个样本, 部分被试驾驶人的信息如表1所示。
| 表1 被试驾驶人信息表 Table 1 The tested drivers’ information |
1.1.2 试验仪器
驾驶人换道行为表征参数的获取主要通过视频监控系统、毫米波雷达和车道偏离报警(Lane departure warning, LDW)系统来完成。视频监控系统主要是通过多路工业摄像机对驾驶人的头部运动、操作行为和本车行车条件、交通环境进行监控。毫米波雷达主要是用来测量本车周围交通环境参数, 包括与周围车辆的距离、相对速度和角度, 可同时对64个目标进行跟踪。LDW系统用来测量自身车辆与车道标识线的距离, 即自身车辆两侧车轮与两侧车道标识线的横向距离。
1.1.3 试验线路
试验线路包括高速公路、普通公路与城市快速干道, 每名驾驶人往返里程约为100 km。试验选取的高速公路试验路段为从青山到长兴的G25高速公路路段, 双向4车道, 限速110 km/h, 全程长度为40.5 km; 香王到蓝田东的G40高速路段, 道路为双向4车道, 限速100 km/h, 全程长度为57.4 km。试验选取国道G104长兴到青山区段作为普通公路试验路段, 全程长约43.8 km, 双向4车道, 限速90 km/h, 道路中央有绿化带隔离。选取的城市快速干道路段为西安市南三环部分路段和东三环路段, 从曲江入口到半坡立交出口, 全程29.6 km。其中南三环路段双向6车道、限速80 km/h, 中央绿化带隔离; 东三环路线双向8车道、限速100 km/h, 中央绿化带隔离。
1.1.4 试验过程
(1)通过对驾驶人在各道路环境下的实车试验, 得到驾驶人行车时的录像, 并记录眼部运动、手部操作、车速以及与周围车辆的相对速度、距离等相关数据。
(2)观看试验录像并筛选出符合条件的场景录像, 找出对应时间的换道的相关数据。
(3)处理分析数据, 得到换道安全预警规则。
由于是在真实道路环境下的实车试验, 试验过程有一定的危险。在保证试验过程安全的前提下, 为了尽可能地确保试验的真实性, 在试验过程中注意以下几点要求:
(1)试验开始前预先告知驾驶人路线, 试验过程中要求驾驶人按照自己的习惯驾驶, 不对其驾驶速度、操作习惯等做出限制或要求。
(2)试验过程中驾驶人身上不佩戴任何试验仪器, 以免对其造成干扰。
(3)试验过程中的数据和录像采集均为全程采集, 即从驾驶人上车开始直到试验结束, 全过程中不因临近碰撞和堵车等原因暂停采集。
1.2.1换道相关定义
(1)换道行为是指驾驶人有意识地操纵车辆进行横向移动, 从而离开本车道, 换入相邻车道的行为, 这通常是为了满足驾驶人驾驶舒适性的要求或达到期望速度。本文所研究的是驾驶人为了达到期望速度而主动采取的正常换道行为, 对于因受到外界条件约束而采取的换道行为不做研究。
(2)对于取消换道行为, 目前国内外没有准确定义, 本文将驾驶人由于本车道前方车辆车速较慢等原因而产生换道意图, 在观察后视镜发现目标车道后方有快速接近车辆或者目标车道后方车辆距离本车较近, 驾驶人认为继续采取换道操作会发生危险, 从而放弃换道的情况视为取消换道。
(3)参考点的定义。一个完整的换道情况周围可能存在如图1所示车辆。图中M车行驶方向如箭头所示, 向左换道至Ld车和Fd车之间。其中, M为本车, L0和Ld分别为本车道前方车辆、目标车道前方车辆; F0和Fd分别为本车道后方车辆、目标车道后方车辆。
 | 图1 换道时周围车辆分布Fig.1 Vehicles distribution in lane change process |
相对于其他车辆来讲, 本车道后方车辆F0与本车在换道时发生碰撞的可能性较小[12], 所以本文只对L0、Ld、Fd车进行安全性分析。
1.2.2 换道录像筛选
图2为被试驾驶人试验过程某一时刻录像, 分4个通道同时观看。将4个通道的录像结合起来, 筛选出正常换道和取消换道操作, 对应找出驾驶人操作过程相关数据。
观看试验录像后, 20名被试驾驶人共挑出正常换道735次, 试验仪器正常输出对应数据的换道726次, 其中换道时有Fd车的524次, Fd车速度比本车快的11次; 取消换道共筛选出139次, 其中因为Fd车距离较远但快速接近本车而取消换道的次数为125次, 因为Fd车虽然没有快速接近本车但距离本车较近而取消换道的次数为14次。
目前的换道预警系统多采用TTC作为预警指标, 但是对于两车之间速度差别不大而距离较小的情况, TTC不能正确地表征其换道安全性, 因此本文将TTC和纵向距离结合起来, 再按照不同的速度等级加以分类, 通过不同的组合条件对驾驶人的危险换道行为进行预警。
本文对TTC的正负作以下规定:
(1)TTC> 0, 表示后车Fd的速度高于本车M的速度, 或者本车车速高于前车L0和Ld的速度, 两车间的距离不断减小。
(2)TTC< 0, 表示后车Fd的速度低于本车M的速度, 或者本车车速低于前车L0和Ld的速度, 两车间的距离不断增加。
为了得到不同车速对于确定预警规则的影响, 需要对本车速度进行分级。在本试验中分析数据时发现, 筛选出的驾驶人换道样本在本车车速低于40 km/h的情况下数量很少, 不能准确代表该速度特征下的驾驶人换道行为特征, 故本文只考虑本车车速大于40 km/h的情况。将本车车速分为4个等级:40< v< 60、61< v< 80、81< v< 100和v≥ 100, 单位为km/h。
表2为不同本车速度级别下本车M与L0车之间的距离以及TTC值的统计情况, 与L0车的距离的样本数量在不同速度级别下分别为149、192、162、90, 平均值分别为29.9、43.8、60.2、84.6 m; 本文统计的为TTC值大于零的情况(下文与此相同), 即两车距离越来越近, 其数量分别为107、167、140、80, 其标准差较大, 故平均值不能准确表征其分布情况, 主要原因是在两车速度相差不大的情况下, TTC出现异常值, 统计时对平均值影响较大。由表2可以看出:距离的百分位数值变化的总体趋势是随着速度的增大而增大。TTC的百分位数值在v< 100时, 与速度成正相关, 总体变化趋势也是随着速度的增大而增大; v> 100时, 与TTC值总体变化趋势存在一定差异。
安全距离百分位数的选取主要是基于大多数驾驶人对预警规则接受程度和安全性的考虑。在Lee的研究中[13], 对16位被试驾驶人的实车试验数据进行调查, 对收集的500个换道样本进行分
| 表2 不同速度级别下M与L0车之间的距离以及TTC值的统计 Table 2 Statistic of the distance between M and the L0 vehicle and TTC in different speed levels |
析, 将本车与周围车辆的距离、相对速度和TTC值的5%、25%分位数作为换道预警值。同样, 本文将距离的5%、25%分位数分别作为相对速度大于零和小于零时的预警上限, 将TTC值的5%分位数与两预警上限的交线作为预警区域的边界线, 得到如表3所示的不同速度级别下的针对L0车的预警规则。本文中的统计数据采集自国内驾驶人的行驶数据, 可以在一定程度上反映国内驾驶人的特点, 因而基于此得到的安全距离百分位数可以作为预警规则确立的参考。
| 表3 不同速度级别下的预警规则 Table 3 Warning rules in different speed levels |
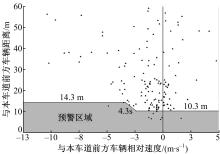
在本车速度级别v> 100时, 由于样本量偏小, 得到的TTC值与其总体变化趋势不尽相符, 将其5%分位数加以调整, 增量取前3种速度级别增量的平均值, 调整为6.1 s。将速度级别为40< v< 60的情况用如图3所示的形式表达出来, 其他级别与此类似。
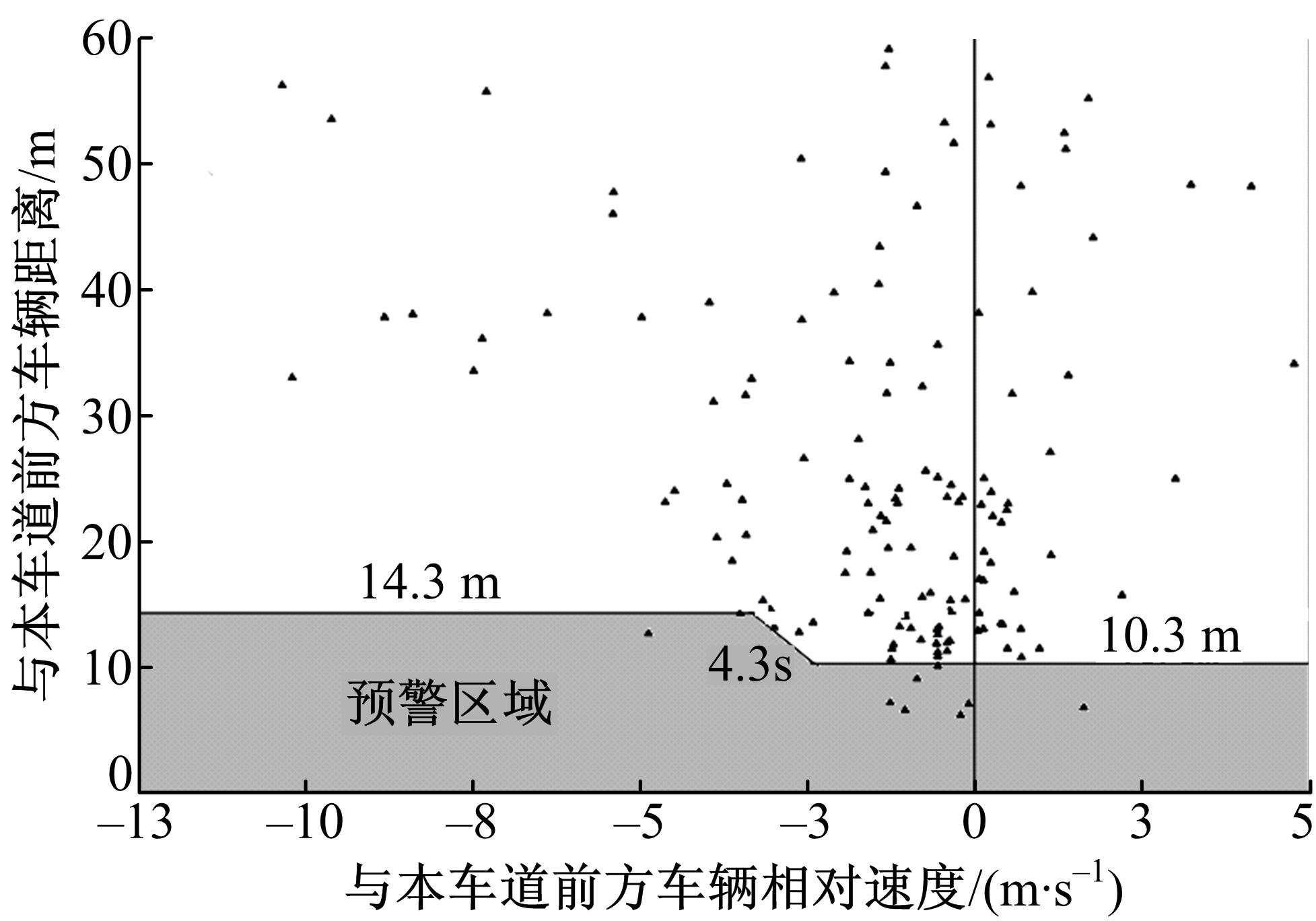 | 图3 对L0车预警规则举例(40< v< 60)Fig.3 Example of the warming rules for the L0 vehicle(40< v< 60) |
TTC定义为当前时刻到两车碰撞时刻经历的时间, 即当前时刻两车距离与两车速度差的比值。图3中纵坐标表示两车距离, 横坐标表示两车相对速度, 且负值表示后车速度大于前车速度, 两车距离减小。基于坐标原点直线的斜率表现为距离和相对速度的比值, 即与TTC的定义一致。故TTC为4.3 s表现在图上为斜率等于-4.3的斜线(即“ 与本车道前方车辆距离” 和“ 与本车道前方车辆相对速度” 之比为-4.3的斜线), 此斜线与14.3 m的上限相交, 表示在40< v< 60速度级别下, 当本车与L0车的距离大于14.3 m时, 即使TTC小于4.3 s, 也不对驾驶人进行警告; 10.3 m作为相对速度大于零时的上限, 并向负方向延伸, 与TTC值为4.3的边界线相交, 表示在此速度级别下, 只要与L0车的间距小于10.3 m, 即使TTC值大于4.3 s或者两车相对速度大于零, 也对驾驶人予以警告, 共同构成的预警区域如图3所示。
表4为不同速度级别下本车M与Ld车距离、TTC值统计情况, 速度级别分类与2.2节相同, 分为4个级别, 与Ld车距离的样本数量分别为115、133、106、45, 平均值分别为37.0、40.8、61.4、75.2 m; 与Ld车的TTC值样本数量分别为37、55、50、24, 其标准差较大, 故平均值不能准确表征其分布情况。
| 表4 不同本车速度级别下与Ld车距离以及TTC值的统计 Table 4 Statistic of the distance far from the Ld vehicle and TTC in different speed levels |
由表4可以看出:距离的百分位数值变化的总体趋势是随着速度增大而不断增大, 成正相关; TTC的百分位数值也与速度成正相关, 其总体变化趋势也是随着速度的增大而增大。与L0车相比, Ld车样本数量相对较少, 因此本车M与Ld车距离、TTC值的统计百分位数存在一定误差, 其百分位数用来设定预警规则会存在一定误差, 下文设定的预警规则只作建议。同样, 将距离的5%、25%分位数分别作为相对速度大于零和小于零时的预警上限, 将TTC值的5%分位数与两预警上限的交线作为预警区域的边界线, 得到如表5所示的不同速度级别下的针对Ld车的预警规则。
| 表5 不同速度级别下的预警规则 Table 5 Warning rules in different speed levels |
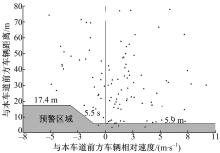
预警规则的总体变化趋势为随速度级别的增大, 预警时间随之变大。然而在本车速度级别为60< v< 80时, 得到的与Ld车距离统计5%、25%分位数值与总体变化趋势不尽相符, 因此本文中取相邻两速度级别条件下的百分位数值的平均值作为预警值。另外, ISO 17387-2008中规定TTC预警阈值最大为7.5 s, 故此处设定的当速度级别为40< v< 60时的TTC值为10.7 s不合理, 同样取相邻两种速度级别条件下的平均值, 设为6.6 s。以速度级别为40< v< 60为例, 以如图4所示的方式表示预警系统针对Ld车的预警规则, 其他速度级别条件与此类似。
 | 图4 对Ld车预警规则举例(40< v< 60)Fig.4 Example of the warming rules for the Ld vehicle(40< v< 60) |
TTC为5.5 s表现在图上为斜率等于-5.5的斜线, 此斜线与17.4 m的上限相交, 表示在40< v< 60速度级别下, 当本车与Ld车的距离大于17.4 m时, 即使TTC小于5.5 s, 也不对驾驶人进行警告; 5.9 m作为相对速度大于零时的上限, 并向负方向延伸, 与TTC为5.5 s的边界线相交, 表示在此速度级别下, 只要与Ld车的间距小于5.9 m, 即使TTC值大于5.5 s或者两车相对速度大于零, 也对驾驶人予以警告, 共同构成的预警区域如图4所示。
本试验对Fd车的研究包括正常换道样本, 还包括对取消换道样本的研究。为了确定合理的预警规则, 拟采用安全、冲突和临近碰撞的三级预警方式。安全区域表示驾驶人在换道时, 即使不注意其他车辆的存在, 执行换道操作仍是安全的; 冲突预警区域表示驾驶人换道时大多数情况下周围存在车辆, 系统给予驾驶人警告是提醒驾驶人需要提高警惕, 注意换道范围内的车辆; 临近碰撞预警区域则代表系统警告驾驶人此时不可执行换道策略, 否则有很大可能与周围车辆发生碰撞事故。
表6为正常换道样本中, 在不同速度级别下, 本车M与Fd车距离、TTC值的统计情况。距离的样本数量各级别下分别为122、159、146、97, 而TTC值的样本数量分别为19、38、36、18。可见, TTC值样本量较少, 如果采用TTC值的百分位数作为预警规则, 可能会造成误警或漏警的概率增大。因此, 对于预警规则中TTC值的设定本文借鉴国外Tim van Dijck的研究, 以3 s为界限[2]。
| 表6 不同速度级别下与Fd车距离、TTC值的统计 Table 6 Statistic of the distance far from the Ld vehicle and TTC in different speed levels |
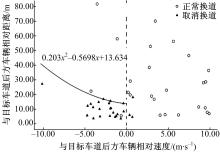
将各个速度级别的正常换道与取消换道的样本以散点图的形式表达出来, 横坐标为相对速度, 纵坐标为距离, 图5所示为40< v< 60级别。用最小二乘法找出正常换道数据与取消换道数据的分隔点的拟合曲线, 得到拟合公式:

在换道过程中, 驾驶人对后方车辆的判断需要借助后视镜完成, 容易出现判断不准确的问题, 同时视觉盲区的存在容易引发冲突, 因此Fd车对于换道的安全性影响最大。基于此项考虑, 参考距离的5%、50%分位数作为预警区域的上、下限, TTC值取3 s作为临近碰撞和冲突预警区域的分界线, 将正常换道与取消换道数据分隔点的拟合曲线作为冲突和安全区域的分界线。
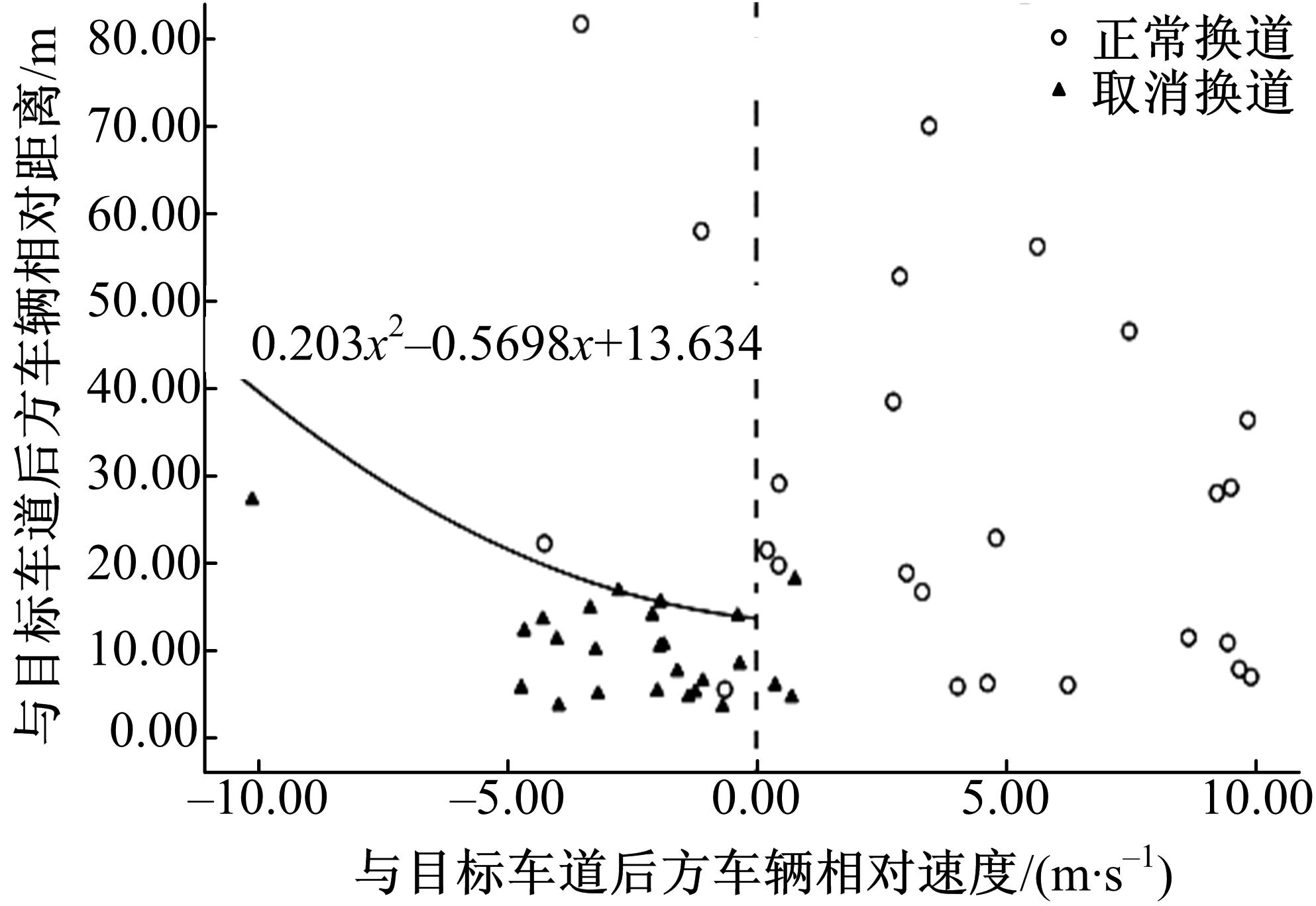 | 图5 正常换道与取消换道样本分布Fig.5 Sample distribution of normal and cancelled lane change |
由表6可以看出:本车与Fd车的距离的百分位数值总体变化趋势为随本车车速级别的增大而增大, 由于样本量的原因, 个别百分位数值不符合该趋势, 因而单纯以5%、50%分位数作为预警区域的上、下限不尽合理, 因此在设定预警规则时做相应调整, 得到如表7所示的不同速度级别下的针对Fd车的预警规则。
| 表7 不同速度级别下的预警规则 Table 7 Warning rules in different speed levels |
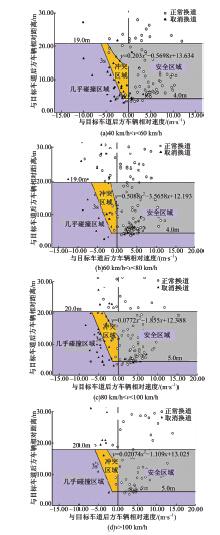
在与Fd车正常换道和取消换道样本的相对速度、距离关系上, 给出各速度级别条件下的预警区域, 如图6所示。
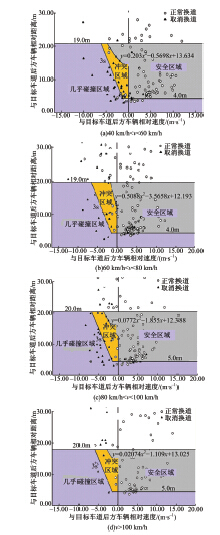 | 图6 不同速度级别下对Fd车的预警规则Fig.6 Warning rules for the Fd vehicle in different speed levels |
对本车速度级别40< v< 60条件下的预警区域图进行分析, 见图6(a)。TTC为3 s表现在图上斜率为-3的斜线, 此线与19.0 m的预警上限、4.0 m的预警下限相交, 共同构成临近碰撞预警区域的边界。该区域表示当本车与Fd车的距离大于19.0 m时, 即使TTC值小于3 s, 也不对驾驶人进行警告; 当本车与Fd车的距离小于4.0 m时, 即使TTC值大于3 s或者两车相对速度大于零, 也对驾驶人发出临近碰撞警告。
正常换道数据与取消换道数据的分隔点的拟合曲线式(1)与19.0 m的预警上限、相对速度为零的线相交, 加上TTC值为3 s的斜线, 预警下限4.0 m向负方向的延伸线, 共同构成冲突预警区域的边界。当本车M与Fd车的相对关系处于该区域内时, 对驾驶人发出冲突警告。
预警上限19.0 m以下除去临近碰撞和冲突预警区域的所有区域即为安全预警区, 当本车M与Fd车的相对关系处于该区域内时, 系统对驾驶人发出安全讯息。
本试验采集样本皆为驾驶人在正常驾驶状态下的数据, 样本数据点落入预警区域即表示本文得到的预警规则会对该数据点对应的行驶状态进行预警。根据驾驶人对预警的接受程度即可对预警规则的可行性进行验证, 本文研究分析周围车辆各样本中位于预警区域内的比例关系。预警规则的设定主要是依据样本统计值百分位数、样本存在边界值的趋势, 考虑距离和相对速度对于换道安全性的影响, 决定预警区域的上下限以及各预警区域的范围。
表8为前方车辆换道样本在预警区域的数量分布及其比例, 从表中可以看出, 由于试验样本均为正常换道, 故预警比例较小。对L0车的预警比例要高于Ld车, 因为试验中L0车速度一般比本车小, 对驾驶人换道的影响较大, 而Ld车一般与本车距离较远或者车速相差不大, 对换道的影响相对较弱。对L0车的预警比例随着本车车速的增大而不断增大, 而对Ld车的预警比例没有这样的趋势。
表9为Fd车换道样本在TTC为3 s、3~5.5 s预警区和本文设定预警区域的数量分布及其比例, 在此TTC取3 s和5.5 s是参考文献[13]中对于换道迫切度的分类边界值。
从表9可以看出:对正常换道样本而言, 其分布于临近碰撞预警区域的比例比TTC为3 s区域要大, 但均在5%以内, 属于可接受范围, 其原因是本文设定预警规则时, 对两车纵向距离较近的情况进行了预警。对于取消换道样本, 分布于临近碰撞预警区域的比例比TTC为3 s区域的比例要大, 说明本文设定的预警规则更符合驾驶人对于危险的判断标准。
| 表8 前方车辆各样本预警比例 Table 8 Warning proportion of the front vehicle sample |
| 表9 Fd车样本各预警区域分布及比例 Table 9 Distribution and proportion of each warming section for the Fd vehicle sample |
正常换道样本中, 其分布于冲突预警区域的比例明显比TTC为3~5.5 s区域大, 而取消换道样本中无明显特征。其原因是, 本文采用正常换道和取消换道样本的分界线作为预警规则的黄、安全分界线, 相对于TTC为3~5.5 s区域, 本文对Fd车车速大于本车车速, 而距离不超过预警上限的情况进行了更多的冲突预警, 这也更符合冲突预警的设定原则。
从以上的分析对比可知:本文在设定预警规则时, 按不同速度级别进行了分类, 相对于单一标准, 提高了预警系统的适应性和实用性。
一般预警系统只对目标车道后方车辆Fd车进行预警, 本文设定的预警规则考虑了前方车辆L0和Ld, 且对正常换道样本的预警比例属于可接受范围, 即在保证低误警率的同时提高了换道安全性。
对于Fd车, 本文设定的临近碰撞预警区域考虑了由于距离较近可能导致危险的情况, 排除了距离超过预警上限的情况, 相比TTC为3 s区域, 临近碰撞的预警比例增大; 在设定冲突预警区域时, 从找出驾驶人判定危险的界限出发, 本文采用了正常换道和取消换道分界线作为黄、安全分界线, 相对TTC为3~5.5 s区域, 冲突预警的比例增大。从取消换道样本在预警区域的比例分布可知, 相对TTC为3 s、5.5 s的区域划分, 本文设定的预警规则更为符合国内驾驶人的驾驶习惯。
(1)本文基于实车换道试验数据, 分析了驾驶人换道初始时刻与周围车辆的关系, 考虑本车速度对换道安全性的影响, 建立了不同速度级别下的换道预警规则, 并进行了验证。
(2)相对于一般换道预警系统, 本文增加了对前方车辆的预警, 形成的预警规则在保证低误警率的基础上提高了换道安全性。对于目标车道后方车辆, 本文设定的临近碰撞预警区域考虑了由于距离较近可能导致危险的情况, 排除了距离超过预警上限的情况, 相对于TTC为3 s区域, 临近碰撞预警比例增大; 而对于冲突预警区域, 本文采用了正常换道样本和取消换道样本的分界线作为边界线, 相对TTC为3~5.5 s区域, 冲突预警比例增大。
(3)从取消换道样本在预警区域的比例分布可知, 相对TTC为3 s、5.5 s的区域划分, 本文设定的预警规则更为符合国内驾驶人的驾驶习惯。
本文基于实车试验数据, 根据国内驾驶人的特点提出了换道预警规则, 可为国内换道预警系统的开发提供理论基础, 也可作为国内驾驶人驾驶技能和安全培训的参考。当然, 由于是实车试验数据, 换道数据皆来自于安全换道样本, 样本数量的不足也可能导致设定换道预警规则时存在一定误差, 下一步将进行更大样本量的深入研究。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|