
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于分数阶PI λD μ的橡胶坝充排水恒流控制
[单泽彪1 , 石要武1 , 单泽涛2  , 石屹然
, 石屹然1 , 史红伟3 ]
, 石屹然]
|
|


作者简介:单泽彪(1986-),男,博士研究生.研究方向:阵列信号处理,信号检测与自动控制.E-mail:zbshan@126.com
针对橡胶坝充排水这一变结构、大滞后、非线性实际控制系统,提出采用能满足系统稳定性和鲁棒性要求的分数阶PI λD μ控制策略对其进行恒流控制。首先建立了橡胶坝充排水系统的数学模型,从理论上证明了分数阶PI λD μ控制器对于该系统具有较好的鲁棒特性。然后把该分数阶PI λD μ控制器数字化后应用于橡胶坝充排水实际系统中,取得了较好的控制效果。最后给出了恒流量充水过程的实际控制运行曲线,表明本文PI λD μ控制器具有较强的抗干扰性和较好的鲁棒性,达到了恒流量充排水控制的设计目标及要求。
Water filling and drainage system is a typical nonlinear, time varying, variable structure system. A fractional order PI λD μ control scheme for such system is proposed. First, the mathematical model of the water filling and drainage system of a rubber dam is established. It is proved in theory that the fractional order PI λD μ controller has better robust properties for the system. Then a fractional order PI λD μ controller is designed for the system in a practical project, which achieves good control effect. Finally, an actual control curve of constant current is given using the fractional order PI λD μ controller. Practice proves that the proposed control scheme is efficient and the system possesses good static and dynamic performance and certain robustness.
橡胶坝充排水控制系统的恒定流量充排水控制对橡胶坝工程设施具有重要的意义。工业过程控制中流量控制的方式一般都是采用交流变频调速器调节水泵电机的转速, 继而实现输出流量的平滑无级调节。当需要对这类由通用变频器加感应电机构成的变频调速系统进行控制时, 采用常规PID往往难以达到预定的控制效果[1, 2], 针对这类问题, 杜欣慧等[1]提出了一种基于参数自调整模糊PID控制的交流闭环变频调速系统的设计方法; 戴先中等[2]采用了一种神经网络逆控制的方法, 使得这种变频调速系统获得了更加优良的运行性能。然而上述研究都是基于系统结构不发生变化时的情况。
由于运行环境的复杂性和充排水系统结构设计的特点, 橡胶坝充排水系统不仅表现出强非线性和大滞后性, 而且还属于一种变结构、变参数的控制系统。针对此问题, 本文提出采用能满足系统稳定性和鲁棒性要求的分数阶PIλ Dμ 对其进行充排水恒流控制。分数阶PIλ Dμ 是把传统整数阶PID的阶次推广到分数阶领域, 它不仅仅是比整数阶PID控制器多了两个自由度— — 积分阶次和微分阶次, 使其具有更大的调节范围, 更重要的是它具有比整数阶PID更好的控制品质及更强的鲁棒性[3]。目前已提出的几种重要的分数阶控制器有TID控制器[4]、CRONE控制器[5]、P(ID)μ 控制器[6]以及PIλ Dμ 控制器[7]等。其中分数阶PIλ Dμ 控制器在一定范围内对本身和被控对象的参数变化不敏感, 在稳定性和动态性能方面具有整数阶PID控制器不可比拟的优势。
在分数阶PIλ Dμ 控制器应用研究方面, 人们也做了不少的工作, 如文献[8]针对二阶惯性系统的速度控制设计了一个分数阶PIλ Dμ 控制器、文献[9]在一般时滞系统方面进行了分数阶鲁棒控制研究、文献[10]针对车辆方向控制进行了分数阶PDμ 控制器的研究。然而, 学者们的研究大多都是针对不同系统模型做的理论仿真研究, 在实际系统中真实运用却鲜见报道。
作者基于松花江壅水坝实际工程项目, 首先把实际系统中的通用变频器及其直接驱动的水泵电机看作一个整体— — 变频调速控流系统, 给出了相应的数学模型, 并从理论上证明了分数阶PIλ Dμ 控制器对于该充排水系统具有较好的鲁棒特性; 然后把该分数阶PIλ Dμ 控制器数字实现化后应用于充排水实际系统中进行恒流量控制与调节; 最后给出了恒流量充排水的实际控制运行曲线, 结果证明了本文方法的有效性。
橡胶坝主要由橡胶坝袋、土建工程及充排水系统三部分组成, 其中充排水系统主要由远程监控系统、充排水泵、输水管路、变频器、电气控制装置、水位监测设备、坝袋高度及内压检测装置等组成。根据坝袋高度、坝袋内压以及上下游水位, 通过变频设备对水泵电机的启停/调速控制以及输水管路上的电动阀的开关控制等进行坝袋充排水自动控制, 图1为实际充排水系统结构图。
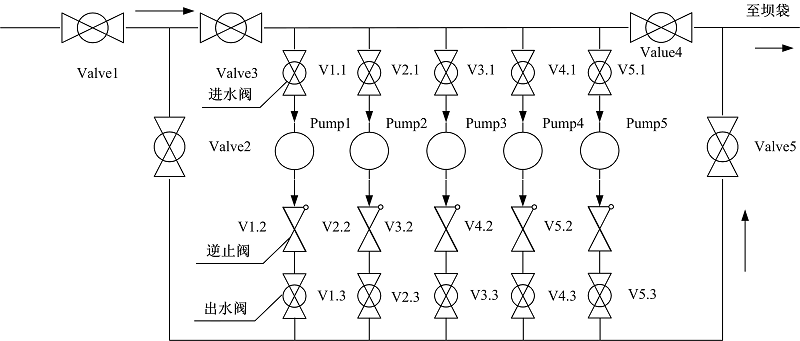 | 图1 橡胶坝充排水系统结构图Fig.1 System of filling and draining off water of rubber dam |
上述充排水系统主要由5台水泵电机及各管路进出水阀门构成, 其中每台水泵电机又由一台变频器进行变频调速控制。充水过程:打开阀门1、阀门3及阀门5, 使之形成相应的充水通路(图1中箭头表示方向), 然后再启动相应数量的水泵进行充水, 各水泵出水先汇至同一管道, 最后通过阀门5后再流至橡胶坝袋方向。排水过程与之正好相反, 即打开阀门1、阀门2与阀门4及相应的进出口阀门, 形成相应排水通路, 然后再启动相应数量的水泵对坝袋进行排水调节。
此充排水系统的主要控制问题就是根据橡胶坝控制运行要求, 在橡胶坝总充排水量允许范围内, 启动相应数量的水泵对坝袋进行充排水, 并在此过程中通过变频器变频调节, 实现橡胶坝袋的总进、出水流量恒定, 即设计一个控制器通过变频器去调节水泵转速, 在因系统设定值改变导致泵启动数量和出水阀门开度的变化或受到其他干扰情况下使坝袋的总进、出水流量在较短的时间内稳定在预先设定的状态, 并满足一定的动态性能和允许的静态误差要求。同时还需满足各运行水泵出口压力均衡, 以防止某出口压力偏小造成其逆止阀关闭的情况发生。
橡胶坝充排水系统中每台水泵电机都由一台通用型变频器进行变频调速控制, 把每台变频器及其驱动的水泵电机看成一个整体, 称之为变频调速控流系统。如果忽略各水泵在整个充排水系统中的位置结构差异, 那么此充排水系统可以看成由5个相对独立且特性相同的变频调速控流子系统构成, 对于每个变频调速控流子系统来说, 给定变频器一个频率信号输入就能得到水泵的一个流量输出。
由充排水系统的特性可知, 水泵由初始状态向管道充排水的恒流状态过渡时, 可分为流量上升过程与恒流过程, 其中流量上升过程, 可近似为一个时间常数T1比较大的惯性环节; 恒流过程中, 流量可认为基本不变, 是一个纯滞后过程, 则供水系统的模型可表示为:
式中:K1为供水系统的增益; τ 为供水系统的时滞常数。
变频器和水泵电机可近似等效为时间常数为T2的一阶惯性环节[11], 表示为:
式中:K2为调速系统的增益。
系统中的其他控制或检查环节, 如继电器控制转换、流量测量转换等环节的惯性时间及延迟时间与供水系统的时间常数相比都可以忽略, 均可等效为比例环节, 故整个变频调速控流子系统的模型可表示为带滞后的两个惯性环节的串联, 如下式表示:
式中:K为系统的总增益。
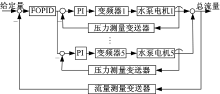
根据橡胶坝充排水系统实际控制要求, 设计了如下双闭环控制方案, 其中外环采用的是流量反馈控制, 控制器应用分数阶PIλ Dμ 控制; 内环采用的是压力反馈控制, 控制器应用PI控制, 由于该系统中含有5个相对独立的变频调速控流子系统, 故设计了5个并级形式的内环控制环节。主回路(外环)用来进行总进、出水流量的控制, 实现恒流量充排水; 副回路(内环)用来进行各水泵出口压力的调节, 保证各出口压力均衡。当总进、出水流量高于或低于给定值时, 流量控制器发出校正信号, 修正水泵控制系统的给定值, 使水泵减少或增加进、出水量, 经过校正过的进、出水量将等于给定值。控制系统框图如图2所示。
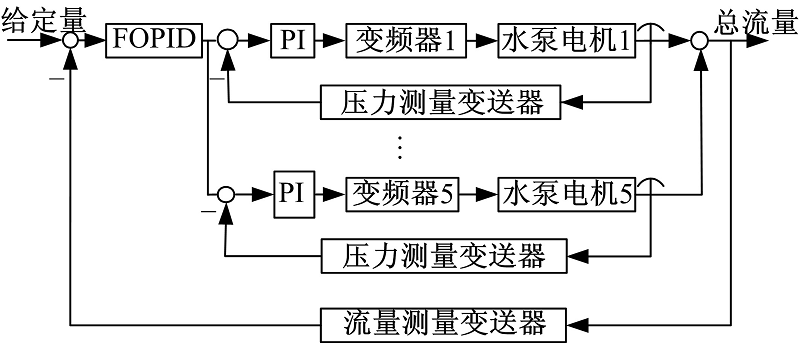 | 图2 橡胶坝充排水双闭环控制系统框图Fig.2 Two closed loop control system of filling and draining off water of rubber dam |
图2中, 压力PI控制器传递函数为Cp(s)=Knp+Kni/s, 结合式(3)变频调速控流子系统的传递函数可知整个内环部分的闭环传递函数为:
再设分数阶PIλ Dμ 控制器的传递函数为Cf
式中:N为实际水泵启动的数量, 可见, 当N取不同值时, 系统结构是变化的。
一般的分数阶微积分算子可用下式来表达:
式中
从不同角度去考察分数阶微积分可以得到不同的定义, 其中最著名的是Riemann-Liouville(RL)定义, 其定义如下:
式中:n-1≤ α ≤ n, n∈ N; Γ (· )为Gamma函数。
Laplace变换不仅适用于整数阶系统, 同样也适用于分数阶系统。根据RL定义, 分数阶微分的Laplace变换为:
分数阶积分的Laplace变换为:
整数阶PID控制器的传递函数描述为:
式中:U
把上式中的微分与积分项的阶次推广到实数, 便可以得到分数阶PIλ Dμ 控制器的传递函数, 即:
式中:积分阶次λ 和微分阶次μ 可以是任意正实数, 而且积分项是sλ , 也就是说在对数相频曲线图中, 它的斜率不再是-20 dB/dec, 而是-20λ dB/dec。式(11)所对应的时间域方程可以表示为:
与传统整数阶PID控制器相比, 分数阶PIλ Dμ 控制器除了具有KP、KI、KD三个可以用来调整系统性能的参数外, 还增加了一个积分阶次λ 和一个微分阶次μ 两个参数。通过合理的参数选择, 分数阶PIλ Dμ 控制器在提高系统灵活性、鲁棒性以及总体控制性能等方面将起到很大的积极作用, 从而取得更好的控制效果。
分数阶控制器是无限阶次, 通过计算机具体实现时需要对微积分算子进行离散化。在此采用Tustin+CFE直接离散化方法[12]对其进行数字实现, 把分数阶微积分sα 用Tustin算子来表示得到阶次为α 的生成函数为:
Dα
式中:T表示采样时间。
然后用连分式将式(CFE)近似展开, 形式如下:
式中:ai
式中:Pp(z-1)、Qq(z-1)均为变量z-1多项式; CFE
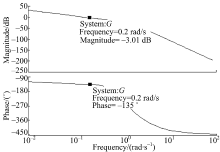
使用离散的分数阶PIλ Dμ 控制器对前面所述的充排水系统进行鲁棒性分析, 其中变频调速控流子系统参数K=1.25, T1=35 s, T2=6 s, τ =65 s是由现场测试数据辨识而来, 并经现场调试整定确定分数阶PIλ Dμ 控制器参数为KP=0.42, KI=0.002, KD=10.5, λ =0.81, μ =0.92; 内环压力PI控制器参数KnP=0.24, KnI=0.05, 用Tustin+CFE直接离散方法, 采样周期T=1 s, 逼近阶次为3, 并取N=2, 即有两台水泵在运行工作状态时, 得到基于分数阶PIλ Dμ 控制器的充排水系统开环传递函数Bode图如图3所示。由图3可知, 该控制器对于在有两台水泵工作时的该系统具有较好的频域特性, 即在截止频率ω c处幅频特性比较平坦, 说明其闭环系统具有较好的鲁棒稳定性, 而且在截止频率ω c附近其相频特性曲线亦比较平滑且相对平坦, 说明系统具有较好的增益鲁棒性。
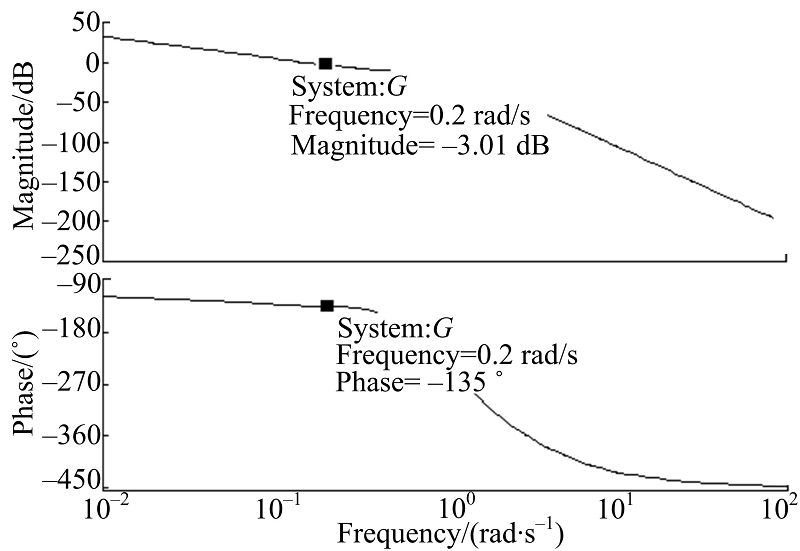 | 图3 基于分数阶PIλ Dμ 的充排水系统开环传递函数Bode图Fig.3 Bode diagram with fractional order PIλ Dμ controller |
在松花江壅水坝工程项目中进行橡胶坝恒定流量充排水控制实验, 其中数据采集周期Tc=0.5 s, 其他控制器参数如同2.3节所述。该系统中硬件主要有ABB/ACS510-01型号变频器, 研华工业控制计算机, 实现数据传输功能的西门子系列S7-300PLC, 75 kW、Y315L2-10型三相异步电动机, 900ZLB-4型卧式离心泵, 压力及流量传感器等, 软件主要是进行监视及控制功能的WinCC组态软件, 其中分数阶PIλ Dμ 控制率是在WinCC全局脚本编辑器中采用ANSI C实现。
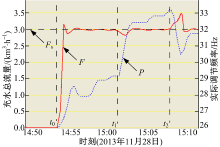
实验1:开启两台水泵, 进行开关阀实验; 实际运行曲线如图4所示。
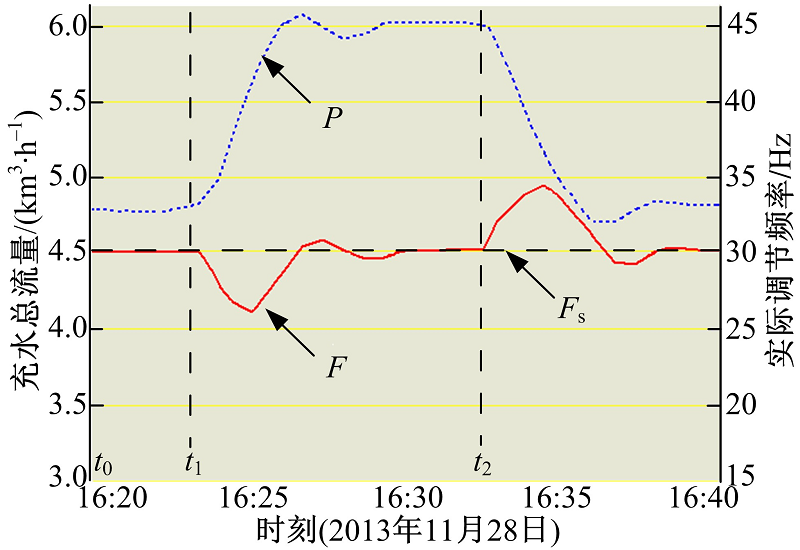
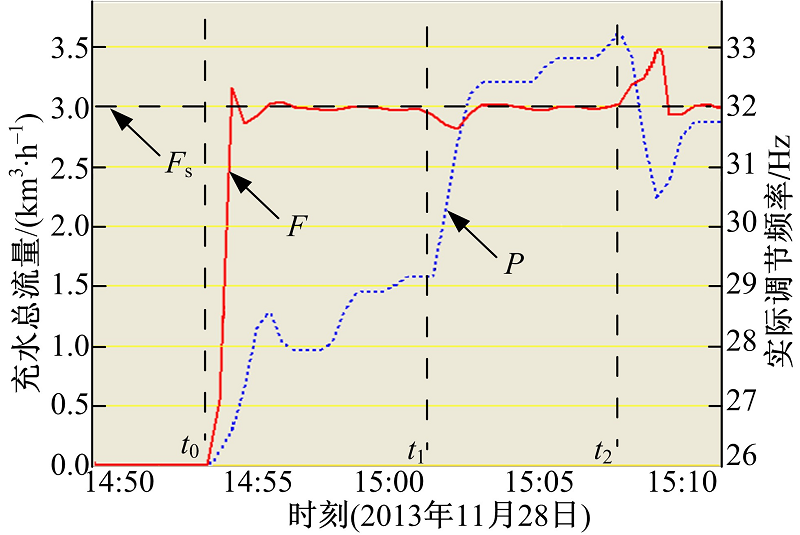 | 图4 充水过程的实际控制曲线(开关阀实验)Fig.4 Actual control curve of filling water process with open or close values |
图4中, Fs表示充水流量设定值, F表示实际充水流量值, P表示实际调节频率值。打开两个坝袋进口阀门, 并在t0时刻启动1#、2#两台水泵, 从图4中可以看出, 经过一段时间调节, 实际流量稳定在设定值附近并保持基本恒定, 说明设计的控制器具有较好的控制性能; 在t1时刻, 调整其中一台水泵出口阀门开度至30%, 在t2时刻, 又重新完全打开该阀门, 可见, 流量稍微有点下调(t1时刻)和超调(t2时刻), 随后又很快回复到原设定值状态, 说明设计的控制器具有较强的抗干扰能力。另外从图4中可以看出, 此时控制输出(频率)基本保持不变且略高于最初状态时, 说明随着橡胶坝不断地充水, 坝袋中的压力也在不断变大, 体现出了坝袋充水过程中的非线性。
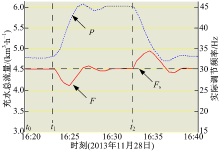
实验2:开启3台水泵, 进行加减泵实验。实际运行曲线如图5所示。
 | 图5 充水过程的实际控制曲线(加减泵实验)Fig.5 Actual control curve of filling water process with increase or decrease pumps |
图5中, 初始运行状态是3台水泵(1#、2#与3#水泵)为三个坝袋进行充水, 即图中t0~t1时段, 此时段中流量实际值等于流量设定值4.5 km3/h且保持恒定; 在t1时刻, 在保持流量设定值不变的情况下, 对其进行减少一泵(如关闭1#泵)实验, 从图5可以看出, 流量曲线经过几次振荡后又达到设定值, 可保持基本稳定, 而此时频率输出在45 Hz处基本保持不变; 在t2时刻, 重新启动刚才关闭的1#泵, 流量又很快回到了原初始状态, 说明在系统结构发生变化时设计的控制器仍具有较好的控制性能。
从上面实际运行曲线可以看出, 不仅是在初始启泵过程中可以有效控制充水总流量达到橡胶坝恒流充水的目的, 而且在加减泵(系统结构变化)和开关阀(参数变化)情况下仍能有效达到流量调节的目的, 且都具有较好的控制效果。总体说明分数阶PIλ Dμ 控制方法具有较好的控制性能和较强的鲁棒性, 采用该控制方法有效解决了该充排水系统中的结构变化、时变性及非线性等问题, 达到了在充水过程中的流量恒定的控制目的。另外经过现场运行试验, 在橡胶坝排水过程中同样可以达到流量恒定控制的设计要求。
针对橡胶坝充排水这一复杂的实际控制系统, 采用具有一定鲁棒特性的分数阶PIλ Dμ 控制方法, 在对分数阶PIλ Dμ 控制率进行数字实现后, 把其应用于该系统中进行恒定流量充排水控制与调节, 现场实际运行效果表明该分数阶PIλ Dμ 控制方法具有较好的抗干扰性和较强的鲁棒性, 取得了良好的控制效果, 达到了恒流量充排水控制的设计目标及要求。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|