

{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于智能空间-车框架理论的车辆行驶运动学状态的预测
[唐晓峰 , 高峰, 徐国艳, 丁能根, 蔡尧, 刘建行]
, 高峰, 徐国艳, 丁能根, 蔡尧, 刘建行]
, 高峰, 徐国艳, 丁能根, 蔡尧, 刘建行]
|
|


作者简介:唐晓峰(1980-),男,博士研究生.研究方向:智能车辆.E-mail:tangjianhong@dae.buaa.edu.cn
提出了高速公路智能空间(HIS)-车框架理论,研究了车辆经过高速公路隧道时的行驶状态。首先建立车辆纵向、横向动力学模型,并基于车辆道路行驶的特点,分别研究车辆纵向、横向的行驶状态,并运用模型预测控制方法对车间距、横向偏移等状态预测,结合预测控制算法的特点设置变量条件,最后采用MATLAB/CarSim进行联合仿真。仿真结果表明:采用高速公路智能空间(HIS)-车框架理论可以完成当某车前方道路发生交通事故时预测出车辆距离以及该车的侧向偏移等数据,以保证车辆安全行驶。
Highway Intelligent Space-Vehicle Framework Theory (HIS-VFT) is proposed to research vehicle driving state when passing highway tunnel. First, the longitudinal and lateral dynamics models are built based on the road driving characteristics to study the longitudinal and lateral driving states. Then, model predictive control method is used to predict relative vehicle distance and lateral deviation. Combined with prediction control characteristic, the variable conditions are set. Finally, MATLAB/CarSim is used to simulate the process. The simulation results show that using HIS-VFT can achieve vehicle safety driving when the traffic accident happens on the road ahead.
一个新概念高速公路智能空间(Highway intelligent space, HIS)在文献[1]中被提出。HIS系统的主要目的是创立一个智能化的行驶空间, 将传感器布置在必要的路段, 如高速公路隧道空间, 容易发生车辆事故的高速路段或者在能见度较低的行车道路中, 并采用先进的交通信息技术(Telematics)实现车车之间、车辆和服务器之间的信息传输, 以保证车辆能及时收到前方道路的信息, 驾驶者可以立即调整车辆行驶状态以避免发生碰撞。引进HIS系统的另一作用是提供一个信息可以共享的空间, 所有状态存储在智能空间服务器(HIS Server)中, 车辆根据行驶的道路环境从服务器中获取必要的状态。因此, 根据特定行车情形研究车辆在智能空间的运行是一个重要的过程, 本文侧重于研究当车辆经过高速公路隧道时的行驶状态。
高速公路隧道有其独特的行驶环境, 例如隧道失火引发车辆事故和损坏[2], 隧道中发生的交通事故[3]以及驾驶员失误引起的交通事故[4]。当隧道空间中发生交通事故时, 智能空间服务器的首要任务是向后方较远的正在驶往隧道空间的车辆发出实时性信息, 使车辆可以实时调整行驶状态以避免发生碰撞。从车辆的行驶安全性角度来讲, 车间距、相对车速和自身速度的控制是主要研究的汽车行驶状态。目前, 对车间距的研究普遍采用建立相互车辆跟踪的动力学模型的方法, 考虑恒定距离、恒定时间头车、恒定安全因子、恒定的稳定因子和恒定满意度5种情况[5]。基于高速公路隧道的行驶特点, 本文分别独立分析车辆的纵向、横向运动状态, 独立设计各自的数学模型, 进行状态估计。对于纵向方向, 基于HIS-车框架理论提出了车辆安全距离预测新系统。其过程是:当隧道空间发生交通事故时, 较远前方的车辆突然减速, 此时被试车辆通过HIS服务器获取3次报警距离, 相对速度、加速度会因距离变化也实时调整。第一次报警距离考虑到了驾驶员的反应时间和车辆与HIS服务器通信延迟时间; 第二次报警距离提出了补偿安全距离作为缓冲距离来降低车速; 第三次报警距离是车辆的跟踪状态, 保证车辆之间的最小安全行驶车距, 确定系统的稳定性。对于横向方向, 侧重于研究车辆行驶时的车道保持情况。应用先进的模型预测控制方法进行状态预测和路径优化, 并采用CarSim软件作为整体参考输入, 保证车辆在HIS行驶中能实时获取车辆行驶状态和前方道路信息, 保证行车安全。
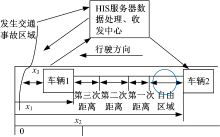
提到车辆的安全性, 车辆的相对距离和相对速度是主要的状态信息。公路隧道空间内, 引起交通事故的因素诸多, 应用HIS-车框架能够保证车辆对环境的有效感知。基于车辆纵向状态分析, 建立以相对距离、相对速度和加速度为分析对象的动力学模型, 其原理图如图1所示。假设在车辆1前方x3米远处的隧道空间发生了交通事故, 通过HIS服务器的数据处理和收发中心, 将前方道路情况发送给车辆1和车辆2, 车辆1立即调整车速, 同时离车辆1较远后方的车辆2也从HIS服务器中获取了车辆1的行驶状态, 其相互距离通过服务器获得, 并不断在车辆2中更新。其中自由区域是车辆2自由行驶的路段。当经过第一次距离时, HIS服务器会实时告知车辆2离车辆1的距离。当车辆2进入第三次距离时, 是系统的自动跟踪阶段, 也就是最小安全行车距离。同时, 车辆要保持侧向车道的行驶安全性, 以预测为主。
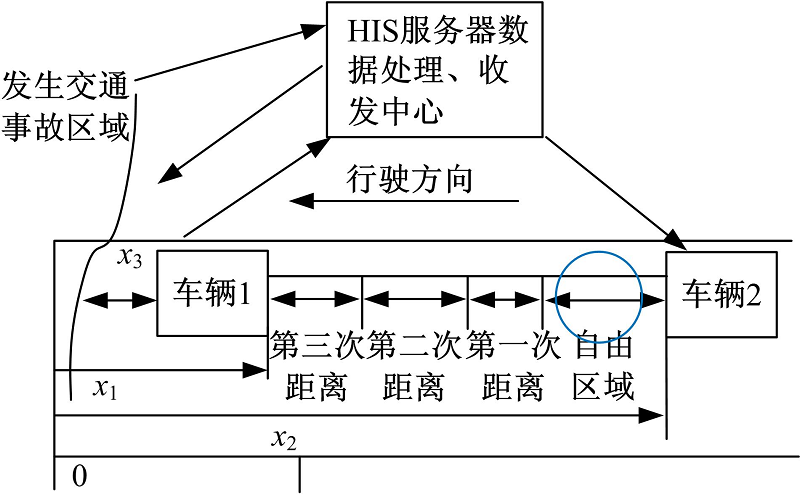 | 图1 HIS-车框架下的车辆模型原理图Fig.1 Vehicle structure for HIS-Vehicle framework |
通过以上分析, 车辆2有3种行驶情况:①以正常行驶减速; ②接收到前方紧急命令后, 车辆1减速制动, 导致车辆2瞬时减速并进入跟驰; ③车辆2将与车辆1发生碰撞, 由于车速太高, 反应不及时。本文侧重于研究第②种情况。
HIS-车框架理论的大致过程如下:
(1)一些可测的车辆状态可通过空间中的传感器采集, 并发送到HIS服务器中。
(2)根据车辆的具体行驶情形, 一些相对状态在HIS服务器的数据处理中心计算而得。
(3)经过计算的参变量, 以通信的形式发送到空间域中的车辆。
基于安全性考虑, HIS-车框架不是紧急制动系统或者碰撞避免系统。它主要提供一套安全报警系统, 并能根据具体的交通路况, 提供车辆相应的状态。因此, 新框架理论的提出不仅适用于公路隧道空间, 而且也适合于雨雪等能见度较低的天气、一些易发生交通事故的路段。
假设车辆2以初始速度v0、加速度a的状态行驶, 定义第一次距离s1, 第二次距离s2, 第三次距离s3, 车辆1和2报警距离s可以表达为:
式中:ξ e为实际相互车辆距离和期望的车间距差; ddes(t3)为期望的车间距。
第一次距离所需要的时间表达式为:
式中:t11为驾驶员反应的时间; t12为通信延时时间, 包括前方交通事故、车辆1的信息发送到智能空间服务器以及从服务器发送到车辆2的通信延时时间。
第二次距离起缓冲作用, 保证车辆2经过第二次距离后, 其末加速度能跟踪车辆1。引入补偿安全距离及如下定义和假设。
定义1 补偿安全距离s2
假设1 考虑到高速公路隧道的行车环境, 假定车辆1和车辆2的速度变化不大。
补偿安全距离s2
式中:ades
本文引入了虚拟车辆来计算第二次距离, 增加虚拟车辆的距离是为了保证在一个新的车辆插入时方便车辆实时可控[6]。增加虚拟车辆的恒定安全距离为:
式中:h为车头时距; Dmin为最小安全距离。
定义2 第二次距离的计算依据是基于车辆的行驶安全特性, 而非考虑道路交通的容量, 因此, 第二次距离的确定需要满足如下范围:
并且满足条件:s2
第三次距离是跟踪模式, 车辆1不可控, 其状态可测, 车辆2可控, 因此, 基于车辆1和车辆2建立相互系统动力学模型:
式中:ξ d为相互车辆距离; Δ v为相互车辆速度差。
由于车辆1纵向动力学是非线性的, 根据文献[7]的车辆动力学模型, 车辆1的纵向动力学可写成:
将式(4)反馈线性化可得:
将等式(4)代入式(5)得出:
式中:μ fc为满足闭环系统性能的输入信号, 在系统中可以认为是引起车辆2加减速的节气门或制动输入; τ f为发动机时间定值, 取值为0.25, 化简上述等式可以得出:
将上述等式写成状态方程的形式:
式中:Δ v、α f分别为实际车间距与期望车间距的相对速度和车辆2的加速度; v
根据式(8)可以计算出第三次距离。
车辆2经过隧道时, 需要考虑车辆车道保持, 避免因侧向偏移而引起的碰撞, 因此需要对车辆2的侧向控制。车辆横向动力学模型和侧向偏移模型原理图可以参考文献[8]。由此, 推出车辆模型和侧向偏移的动力学表达式为:
侧向偏移模型是基于参考模型设计的, 因此车辆侧向偏移应该接近于路径跟踪点, 以保证侧向偏移误差和角度偏差在有限时间域内趋向于零, 其数学模型为:
综合式(9)~(12), 将其化成现代状态方程式:
式中:v为车辆纵向速度; Cf、Cr分别为轮胎前、后的纵向刚度; lf、lr分别为车辆中心与前、后轮的距离; yL为前方车道偏移量; rL为前方车辆的角度差; δ 为方向盘转角; ρ 为前方道路曲率; ls为前方车道的预测距离。
对于纵向方向, 第一个参数是第三次距离的跟踪误差。由于车辆1的行驶状态不可控, 因此它们之间的相互距离会实时变化, 对于第三次的跟踪距离, 要保证绝对的行驶安全性, 条件是:ξ e_min≤ ξ e≤ ξ e_max, 其中, ξ e_min=-5 m是保证行车安全的最低距离, ξ e_max≤ 6 m是距离的最高界限[9]。同时, 也要考虑衡量跟踪距离误差的权重值Qe的范围, Qe值越大, 达到稳定状态的时间越小, 其加速特性也会越明显[10]。第二个参数是相对速度。由于车辆行驶在高速公路隧道路段, 因此, 根据假设1, 相对速度的范围设定在-1≤ Δ v≤ 0.9 m/s。车辆2的加速度范围可以定义为af_min=-3.0 ms-2, ah, max∈
分别考虑纵向、横向控制的优化设计, 采用优化方法实现车辆纵向、横向行驶状态的预测, 综合步骤是:优化准则J可以设定成一个线性准则, 定义预测长度Np∈
总体来说, 系统的运行过程如下:
(1)在时间t=kδ , 定义车辆2的模型预测控制器是:
(2)在t时刻, 车辆状态x
(3)控制器基于状态变量x
(4)当接收了一个新的衡量值后, 循环第一步
p=0, …, N-1, 对每一步进行迭代, 控制器应该解决以下优化问题:
评价准则为:
式中:Q和P分别为输出和控制优化, 应用QP算式解决模型预测控制问题; R为权重值。
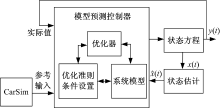
首先进行纵向方向3次距离的仿真, 其次是对车辆2的横向方向的仿真。横向方向, 在MATLAB/CarSim环境下运行, 用MATLAB搭建实时车辆横向动力学模型, 将CarSim输出的状态参数作为参考输入, 进行预测验证, CarSim可以作为实车的模拟环境进行分析, 基本原理如图2所示。
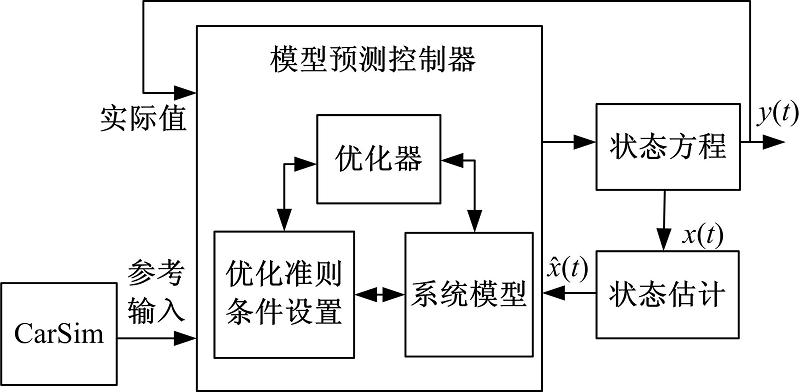 | 图2 CarSim环境下侧向状态预测原理图Fig.2 Vehicle lateral state prediction structure under CarSim environment |
仿真中需要的参数如下:质量m=1416 kg, 惯量Iz=1523 kg· m2, lf=1.016 m, lr=1.562 m, Cf=127 735 N/rad, Cr=181 087 N/rad, 预瞄距离ls=10 m, Ts=0.01 s。
纵向方向在MATLAB环境下模拟, 假设车辆2的初始速度为80 km/h, 经过第一次距离的反应、第二次距离的缓冲减速阶段后, 以平稳的方式进入第三次距离, 同时, 车辆1在车辆2经过的第一、第二次距离过程中, 已经调整了稳定行驶状态, 在第三次距离跟踪模式中, 假定预测长度和控制长度分别是300倍的采样时间, 期望的车辆距离为10 m, 车辆1行驶的加速度范围为
根据上述条件, 由于车辆1一直在匀速范围内行驶, 根据定义1, 当
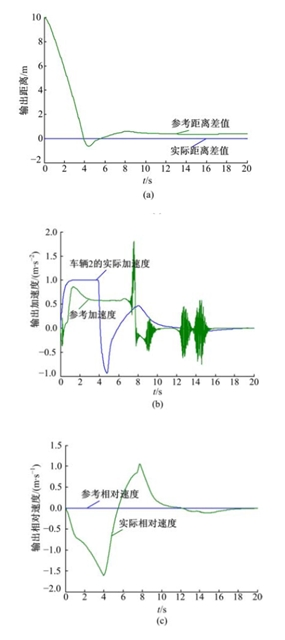 | 图3 车辆1、2的相对距离、相对速度和车辆2的加速度变化Fig.3 Relative distance and the speed between vehicle1 and vehicle2 and acceleration of vehicle2 |
对系统进行前方10 m的偏移率的预测, CarSim作为实车的模拟环境, 主要输出前方10 m的道路偏移率、当前的道路偏移率和侧向速度。用模型预测控制方法进行理论模型的预测过程。
从图4可以看出:采用模型预测控制方法可以有效跟踪当前车辆2的侧向速度、横摆角速度的行驶状态。同时, 系统模拟的是前方道路10 m的情况, 可以看出10 m处侧向偏移与CarSim模型输出的侧向偏移起到有效的预测效果, 与当前的红线侧向偏移的效果相对比,
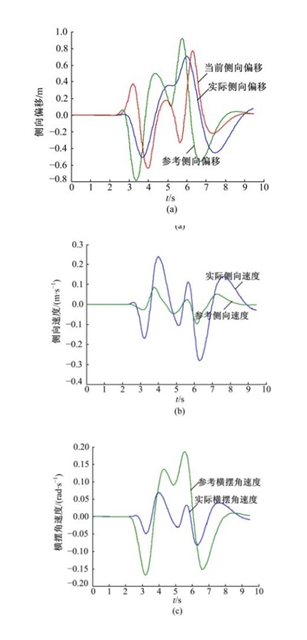 | 图4 前方车辆2的侧向偏移、当前侧向速度和侧向角速度变化Fig.4 Lateral distance, speed and yaw rate of vehicle2 |
前方10 m处的车辆2的侧向偏移有明显的差别, 证明了采用模型预测控制方法进行车辆侧向偏移的预测, 起到了明显的作用。
根据假设1, 在第三次距离阶段, 为保证车辆2的行驶安全性, 研究其侧向行驶特性。从图3和图4中可以得出:车辆2在行驶的整个过程中, 采用模型预测控制方法实现了对车辆距离的预测、侧向偏移率等行驶状态的预测, 证明了采用HIS-车框架理论可以保证当前方道路发生交通事故时, 实现车辆2的安全驾驶功能, 并避开了传统计算车辆安全驾驶意义上算法应用和安全理论框架的复杂性。
采用智能空间(HIS)-车框架理论实现了车辆经过高速公路隧道时前方发生交通事故情况下的车辆行驶状态的预测, 应用模型预测控制方法完成对车辆的相对距离、侧向偏移等主要行驶状态的预测。通过在MATLAB/CarSim下的仿真可以得出, 智能空间(HIS)-车框架避开了传统意义上实现车辆安全驾驶而要求提出精确算法和安全理论框架的复杂性。新框架理论和预测算法的提出和应用可以保证车辆在雨、雪和雾等能见度较低的天气环境下、较易发生交通事故的高速路段, 实现对车辆的预警作用, 比较适合于多车行驶的工况, 防止发生追尾或者碰撞等事故。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|