
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于“三步法”的柴油机urea-SCR系统控制设计
[赵靖华1, 2  , 陈志刚
, 陈志刚1 , 胡云峰1 , 陈虹1 ]
, 陈志刚]
|
|


作者简介:赵靖华(1980-),男,讲师,博士.研究方向:发动机尾气排放控制.E-mail:zhaojh08@mails.jlu.edu.cn
为了同时实现较高的NO x转化率和较低的氨逃逸,提出了一种新颖的面向控制的urea-SCR模型,基于三步非线性控制方法——“三步法”设计了控制器。该控制器能够调节时变参数的非线性系统,跟踪理想的氨覆盖率目标。针对测量噪声和系统的不确定性,研究分析了该闭环系统的稳定性。研究基于精确enDYNA模型,在FTP75瞬态测试循环条件下,与蒙特卡罗随机参数法选取的最优PID控制器对比表明,所提出的控制策略具有很大优势。
For simultaneously achieving NOx conversion efficiency and low ammonia slip, a new control-oriented model of urea-SCR systems and novel nonlinear controller based on triple-step nonlinear method are presented. The proposed controller could drive the parameter-varying nonlinear system to track the desired ammonia coverage ratio. The robustness of the controller against the measurement noises and system uncertainties are analyzed. Based on validated enDYNA model, transient FTP75 driving cycle simulation is conducted to evaluate the effectiveness of the proposed strategy. Comparisons with Monte Carlo methods' optimal PID controller are presented to show the advantages of the proposed strategy.
与汽油机相比, 柴油机具有更高的燃油经济性和更高的动力输出。尽管柴油机已经并且仍将继续在中-重型车辆领域占统治地位, 近些年来, 在轻型车辆领域柴油机也在迅速扩张, 但柴油机的排放问题对其发展一直是个挑战, 特别是NOx排放。研究人员提出了很多降低NOx排放的方法[1, 2]。其中, 尿素选择性催化还原(urea-SCR)技术具备一定优势[2]。该技术利用氨(NH3)还原发动机产生的NOx, 这些氨一般都来源于32.5%的尿素溶液(添蓝溶液), 但储存尿素的罐会增加车辆的重量[3]。虽然氨能够还原NOx, 但其本身也是对人体有害的, 并且有着刺鼻的气味。尽管在当前的排放法规中没有明文规定, 但是较高的氨逃逸被认为是对身体有害的, 并且气味十分难闻[4]。所以, 同时实现较低的NOx排放与氨逃逸成为了urea-SCR系统研究的主要问题。
为满足上述目标, 有学者提出了一些硬件改进措施。但在实际应用中, 大多数都是以增加成本和所占空间为代价[5]。目前, 人们已经普遍认识到, 通过改进尿素喷射技术达到上述控制目标是一种较便捷且经济的方法[6]。当前的一些尿素喷射控制方法, 主要集中在反馈控制设计和基于线性urea-SCR系统模型的控制设计上[3, 7]。其中, 一部分反馈控制是基于NOx传感器的[8], 但NOx传感器对氨有交叉敏感性[9]。最近, 德尔福公司推出了NH3传感器[7], 但由于其还未被量产, 在实际的工业应用中很少用到。这就使得单独的NOx和NH3反馈都很难达到理想的控制目的[10]。于是, 有学者提出了一种综合的反馈方法, 即以氨覆盖率为反馈控制目标。此外, 由于urea-SCR系统化学反应本身具有较强的复杂性和非线性, 逐渐使得非线性控制方法成为了研究热点[11]。因此, 有学者提出了以理想氨覆盖率作为反馈控制目标的非线性控制方法[10, 12, 13]。文献[12]提出了一种基于backstepping的非线性氨覆盖率反馈控制技术, 能够获得较好的排放控制效果。文献[14, 15]还提出了一些氨覆盖率的估计方法。
与此同时, 一些先进的非线性控制方法也在不断发展, 这其中就包括反馈线性化[16, 17]和backstepping技术[18, 19]。但是, 对大多数非线性方法来讲, 设计过程中复杂的推导会使得理论研究与工业实践之间存在一定障碍。为了简化推导过程和降低MAP标定成本, 文献[20]提出了三步非线性控制方法— — “ 三步法” , 并将其应用于直喷汽油机的轨压控制中。该方法借鉴了广泛应用于工业实践的基于MAP的前馈反馈结构。文献[21]将这种方法扩展应用于两输入两输出的车用轮上电机控制系统中。在urea-SCR系统中, 化学反应对废气温度和NOx排放量等参数非常敏感, 而且, 这些参数都是时变的。因此, 本文研究结合urea-SCR系统非线性特点并且考虑到低车重和低成本问题, 提出一种新颖的面向控制的模型表述方法, 将“ 三步法” 扩展应用于时变参数的非线性系统控制中, 设计了一种氨覆盖率跟踪控制器。
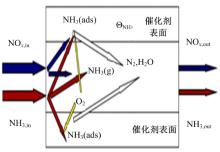
如图1所示, urea-SCR系统中的化学反应主要包括下面几个过程。首先, 发动机排出的NOx, in和添蓝溶液产生的NH3, in进入系统。
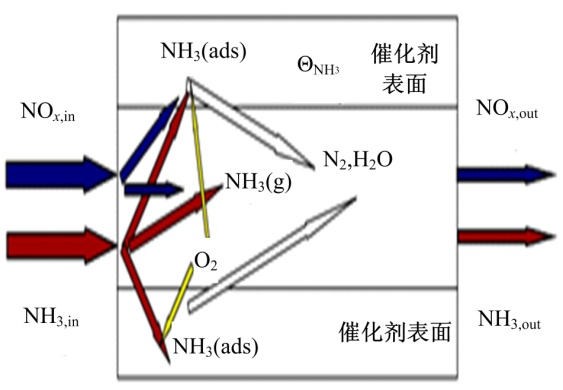 | 图1 urea-SCR化学反应示意图Fig.1 Schematic presentation of the urea-SCR reactions |
在催化器内, 部分NH3被吸附在催化剂表面, 变成吸附态的氨(NH3(ads)), 其余部分仍为气态氨(NH3(g)), 并且这两部分可以相互转化, 反应方程式如下:

吸附态的氨能够在催化剂的作用下选择性地与NOx反应生成N2和H2O, 当温度高于200 ℃时, 该反应主要按照Eley-Rideal机制进行[22], 反应方程式如下所示:

同时, 吸附态的氨也能够被氧化成N2和H2O, 反应方程式如下:

经过上述几步化学反应, 剩余的NOx(NOx, out)和氨(NH3, out)从urea-SCR系统排出。此外, urea-SCR系统的氨贮存能力与吸附态的NH3(ads)之比被定义为氨覆盖率(
Urea-SCR系统的控制目标是要同时实现较高的NOx转化效率和较低的氨逃逸。文献[10, 12, 13, 14]提出了一种氨覆盖率反馈控制方法, 并取得了良好效果。而理想的氨覆盖率目标可以从相对应的发动机urea-SCR系统实验数据及分析中获取。在urea-SCR系统中, 化学反应对废气温度和NOx排放量等参数非常敏感, 且这些参数都是时变的, 这是一项非常具有挑战性的控制需求。本文的控制问题就是, 考虑到系统时变参数非线性的氨覆盖率跟踪控制问题。
研究以欧6(EURO 6)的NOx排放标准为参考, 提出的控制目标为:NOx排放平均水平在0.3 g/kWh以下, 并且氨逃逸在平均80× 106以下。由陈虹等人提出的“ 三步法” 控制策略, 具有简洁和标准化的结构[20, 21], 本文将该方法扩展应用于时变参数系统上, 解决上述urea-SCR系统控制问题。为此, 建立了urea-SCR系统的集中参数模型, 并且根据该系统的非线性特点, 提出了一种新颖的面向控制的urea-SCR系统模型。
根据阿列纽斯方程, 研究对化学反应过程的反应速率进行建模。方程(1)中的吸附(rads)和解吸附rdes速率由如下公式表示:
方程(2)中的还原速率rSCR由如下公式表示:
方程(3)对应的反应速率(rox)由如下公式表示:
需要指出的是, 在柴油机废气中氧浓度总是很高的, 相比于其他气体成分来说十分充足。所以, 大多数的urea-SCR反应速率对氧浓度的变化都不敏感, 可以忽略。
研究假设上述催化反应是一个连续搅拌釜式反应器(CSTR), 即催化系统的所有状态是均质的。基于上述假设, 根据质量平衡以及热量平衡原则, urea-SCR系统模型的常微分方程(ODEs)表示如下:
考虑到urea-SCR系统中, 气体成分的流量与浓度之间的关系为:
并且, 将公式(4)(5)(6)以及(8)代入公式(7)中, 得到:
其中, 上述公式中的参数定义如下:
上述建模过程中的假设和简化都参考了文献[3, 23, 24]。表1和表2分别显示了模型中常量和变量的相关定义及参数。
| 表1 常量命名法 Table 1 Constants nomendature |
| 表2 变量命名法 Table 2 Variables nomendature |
为了实现氨覆盖率控制, 将T,
其中,
该系统为非线性且时变参数系统。设被控输出为y=x1, 控制器的目标为驱动参数依赖的非线性系统跟踪给定参考量y* 。此外, 根据表1中的常量、表2中的变量以及公式(10)中的变量定义, 同时基于吸附态的氨与urea-SCR系统最大氨贮存能力之比小于1的实际情况(0≤ x1< 1), 可知f12(x, p)≠ 0。
为了设计一款非线性的氨覆盖率的跟踪控制器, 研究对上述模型进行适当简化。根据公式(11)(12), 对y求导可得:
以及
式中:A1(x, p)=
A2(x, p)=
并且将A2(x, p)
在本章中, 首先忽略建模误差d1, 基于文献[20]所提出的“ 三步法” 非线性控制策略, 设计了一款氨覆盖率跟踪控制器。设计过程分为三个阶段, 其中前两个阶段顺次推导出稳态控制器和一个参考可变的前馈控制。经过这两步, 得到了明确的误差动态仿射表达式, 主要可简化误差状态反馈设计。因此, 最终的控制法则由三部分组成:稳态控制、参考可变的前馈控制以及跟踪误差反馈控制。需要特别指出的是, 这种方法的优点在于, 系统参数的特性并没有使控制器的推导过程过于复杂化。
以公式(14)所示的新的系统表述为研究起始, 暂且假定d1=0, 首先设计类稳态控制器。通过设定
该控制法则叫类稳态控制, 原因是这部分的获取是基于假设系统处于稳态前提下, 且该法则与当前测量或估计状态x相关, 而不是参照真实的稳态x。该控制法则的设计思想基于MAP的控制方法, 该方法广泛应用于汽车工程领域。MAP的获取可通过大量的稳态实验标定完成, 并且, MAP的执行可根据当前的测量或估计状态。采用上述状态依赖类稳态控制方法的优点, 将会在后续推导过程中逐步体现。
事实上, 面对如此复杂的系统, 仅仅凭借一个稳态控制是远远不够的。为了获取足够的闭环控制性能, 将另外一些附加的控制信息u1引入控制系统。将
代入公式(14)中, 得到
令
由于公式(18)具有
在前两步控制器设计中, 没有考虑到跟踪偏移。为了处理最后的跟踪偏移误差, 定义一个新的控制量u2, 并将其加入到类稳态控制和参考动态的前馈控制中, 且定义的跟踪误差如下:
将
代入公式(14)中, 得到的跟踪误差动态形式如下:
很明显, 公式(21)是e和u的仿射形式。相比基于原系统(11)的控制设计, 这样一种特殊形式, 对于推导渐进稳定的反馈控制器来说, 具有简化控制算法的重要意义。定义e2=
为保证跟踪误差动态是渐进稳定的, 采用backstepping技术推导u2。将e2看做是虚拟控制, 定义V1=
选择虚拟控制为:
在假定k1> 0的条件下, 设e2=
但事实上, e2≠
并且结合公式(22), 推导
定义V2=V1+
选择控制器:
在k3> 0的条件下, 能够得到:
能够保证误差动态是渐进稳定的。再将公式(24)和e2=
再结合公式(15)(18)(31), 得到最终的控制法则如下:
将上述控制法则重写为:
式中:
显然, 本文究所提出的非线性控制器具有简洁的结构。fs(x, p)部分代表了广泛应用的MAP形式的类稳态控制。ff(x, p,
(1)稳态控制能反映系统的一些固有特性, 且当系统接近于稳态时, 稳态控制器起主动作用。
(2)前馈部分根据参考动态给出矫正动作。并且这部分是状态且参数依赖的, 有利于改善瞬态性能。
(3)在稳态和前馈控制的协调下, 最终的误差反馈控制具有仿射线性系统的形式。参数依赖的PID控制具有增益可调的特性, 这一特性能够免除增益调节的试验过程。
在本研究所提出的控制模型中, 氨喷射量
输入信号整形技术, 也称之为动态表面控制技术, 是用来抑制指令信号突然变化的。而且, 通常有必要用低通滤波器来衰减测量噪声。研究为获得有效执行控制法则(见式(33)), 利用上述信号处理技术对所需的
用
过滤器输出为y* 或y, 并且由
控制器的最终实施法则为:
式中:
在上述控制规则的实施中, 包括ff(x, p,
事实上, 其他的一些不确定性可能也被包括在d2中, 将上述控制法则应用到系统(式(36))中, 相应的误差动态系统如下:
式中:d=d1-a1f12(x, p)d2。
上述公式将控制执行过程中的不确定性d2(如公式(38)所示)和模型转化过程中的误差d1(如公式(14)所示), 都包含在一起。
取同样的李雅普诺夫函数V2=V1+
由杨氏不等式可得:
定义W(e)=k1
而且, 从系统(式(39))中能够观察到, k1可以控制跟踪误差e1的衰减问题, 并且k2可以控制e3的衰减。从这一点来看, k1和k2的取值应该大一些。然而, 从系统(式(34))中可以看到, 较大的k1和k2会导致控制器的高增益, 这一点在实际应用中是应该避免的。更值得注意的是, 大的k2会导致e3的快速响应。参考e3=
在细节上讨论了一些跟踪误差的偏移, 并对系统(式(39))进行拉普拉斯转化以及一些简单推导之后, 得到:
由终值定理可得跟踪误差为:
在d为脉冲和阶跃信号的前提下, 可得e1(∞ )=0。从引入积分项的作用来看, 这一点确实很有好处。而且, 如果干扰d是一个有范围
大体来说, 关于干扰的信息量较少, 为了降低跟踪误差的偏移, 建议选择足够大的k0和k2。
综上, 研究给出的控制参数调节规则为:①根据所需的跟踪误差衰减率选择k1, 较大的k1意味着跟踪误差的快速衰减; ②根据可以接受的跟踪误差, 选择大的k0; ③考虑到控制器的高增益问题, 选择k2>
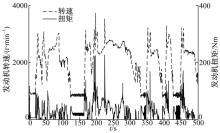
仿真在TESIS公司开发的enDYNA[27]发动机精确建模软件平台上进行, 基于某款确定类型的轻型柴油机建立了enDYNA发动机模型。该发动机有四个缸, 排量为1.9 L, 配备涡轮增压和进气中冷系统, 并且最大转速为4500 r/min。为了充分验证所提控制方法的性能, 仿真在瞬态测试循环FTP75环境下进行, 该瞬态测试循环可以评价连续可变工况条件下的控制系统性能。所选enDYNA发动机模型在FTP75测试循环下, 前500 s的工况变化过程如图2所示。
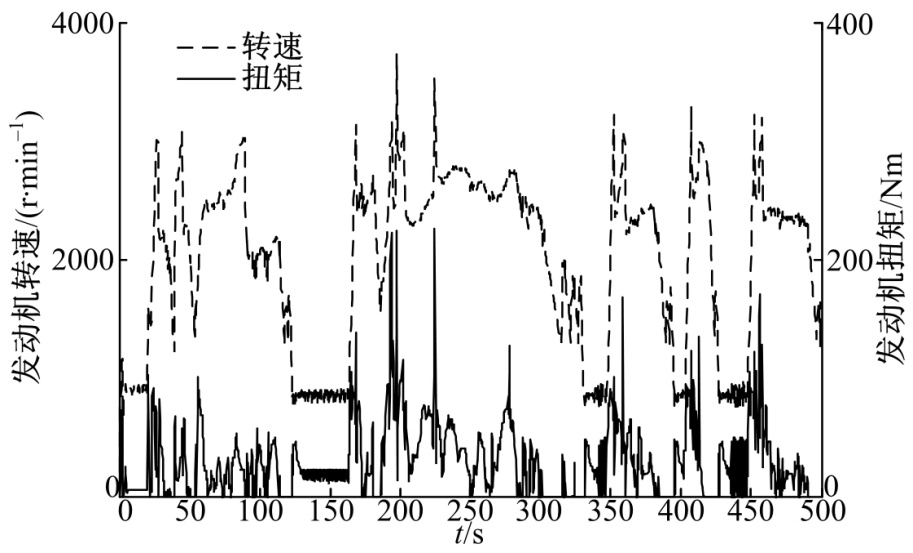 | 图2 FTP75部分瞬态工况条件Fig.2 Part of working conditions of FTP75 |
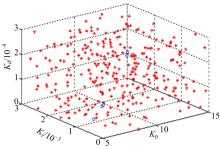
在“ 三步法” 控制器参数选取之前, 首先进行了最优PID控制器参数的选取。该最优PID控制器参数的选取采用了蒙特卡罗方法[28], 该方法的难点是如何选取一个较好的随机数发生器[29]。研究采用了线性同余发生器, 在Kp∈ [5, 15], Ki∈ [0, 3× 10-3]以及Kd∈ [0, 3× 10-4]的范围内, 产生了300个均匀分布的样本。通过将排放水平限定在NOx平均水平低于0.27 g/kWh; 氨平均逃逸量在77.8× 10-6以下; 最大逃逸量不超过114× 10-6, Kp, Ki以及Kd参数被划分为“ 优集” 和“ 差集” 。如图3所示, “ °” 代表“ 优集” ; 而“ × ” 代表“ 差集” 。根据上述参数选取仿真结果, 选择了较小的一组作为最优PID控制器参数, 即Kp=6.278, Ki=8.4× 10-4以及Kd=2.4× 10-5, 排放结果如表3所示。
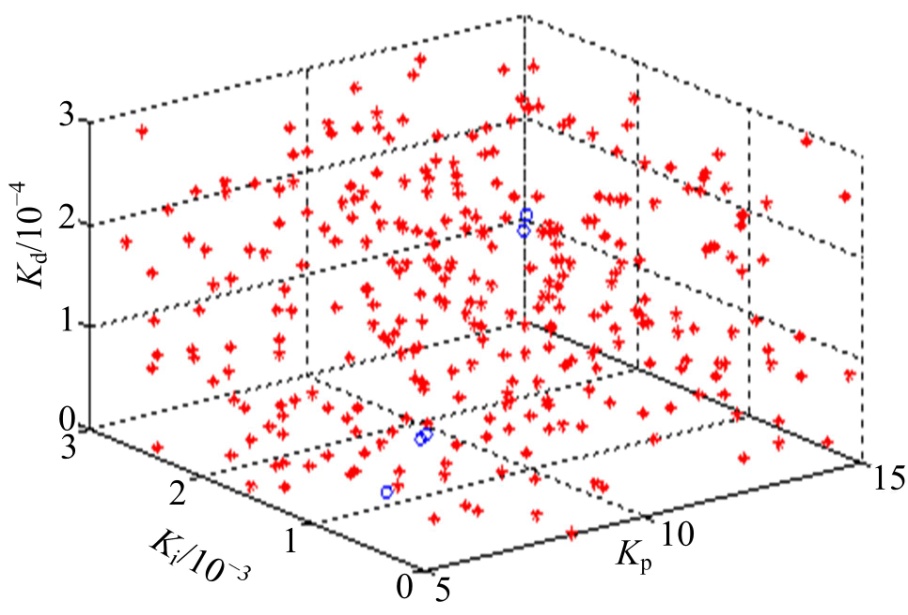 | 图3 PID参数随机样本的分布与划分Fig.3 Distribution and division of random samples of PID parameters |
| 表3 最优PID控制器的参数选取和排放结果 Table 3 Controller parameters selection and emission result of the optimal PID controller |
以上述最优PID控制器排放水平为参考, 结合上述理论分析, 研究进行了“ 三步法” 控制器参数的选取。6组“ 三步法” 控制器参数选取的数值及排放结果如表4所示。在这些组参数中, 三项排放指标都比最优PID控制器要好。而且, “ 三步法” 控制器的参数选取范围相对更大。研究所采用的“ 三步法” 控制器参数如下:
| 表4 “ 三步法” 控制器的参数选取和排放结果 Table 4 Controller parameters selection and emission result of the triple-step method controller |
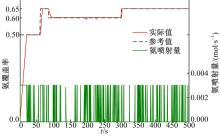
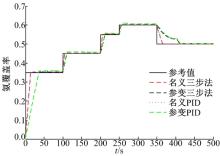
代表性的仿真结果如图4所示。氨覆盖率在初始阶段设置值为0.5; 在第60 s时刻阶跃到0.65; 在第85 s时刻该值阶跃下降到0.6; 最后, 在第300 s时刻再次阶跃回到0.65。
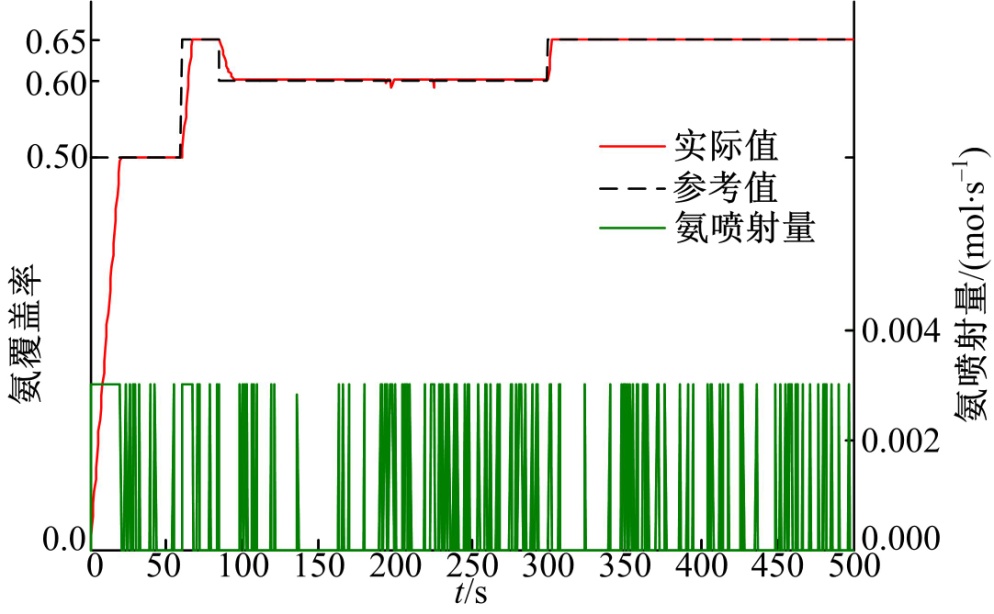 | 图4 氨覆盖率阶跃跟踪控制Fig.4 Ammonia coverage ratios step track control |
上述目标值的改变能够测试控制器的瞬态跟踪性能。该控制输入氨的摩尔流量被限定为0.003 mol/s, 并且喷射器的执行情况也显示在图4中。除个别工况以外, 氨覆盖率跟踪效果较好。在测试循环的初始阶段出现了25 s左右的调节时间, 原因是在FTP75测试循环下, 车辆是从第20 s开始启动的, 之前没有NOx输出, 氨主要经历了吸附反应, 氨覆盖率缓慢上升; 在60~70 s之间的调节时间, 一方面是由于控制目标阶跃变化, 另一方面是由于此刻转速和扭矩也处在剧烈变化之中, 随后的一段时间内废气温度以及发动机NOx排放等参数都非常不稳定, 强烈的非线性对控制器控制效果有干扰; 此外, 200 s和230 s左右时刻的震荡也是上述工况的剧烈变化造成的。85~95 s之间阶跃下降阶段的调节时间, 一方面是由于控制器控制受到约束, 氨喷射量只能是正值, 即只能增加氨覆盖率, 不能减少; 另一方面原因是, 氨覆盖率下降速度受到此工况下NOx排放量的限制。
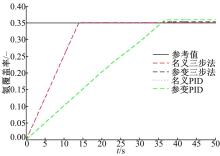
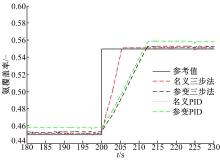
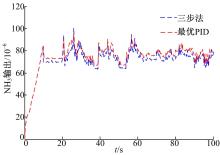
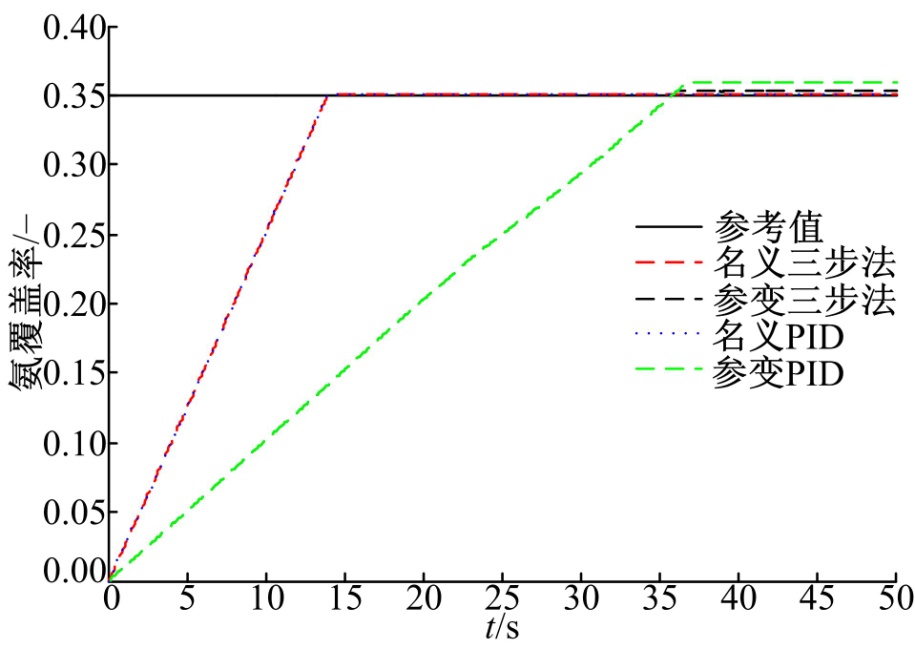
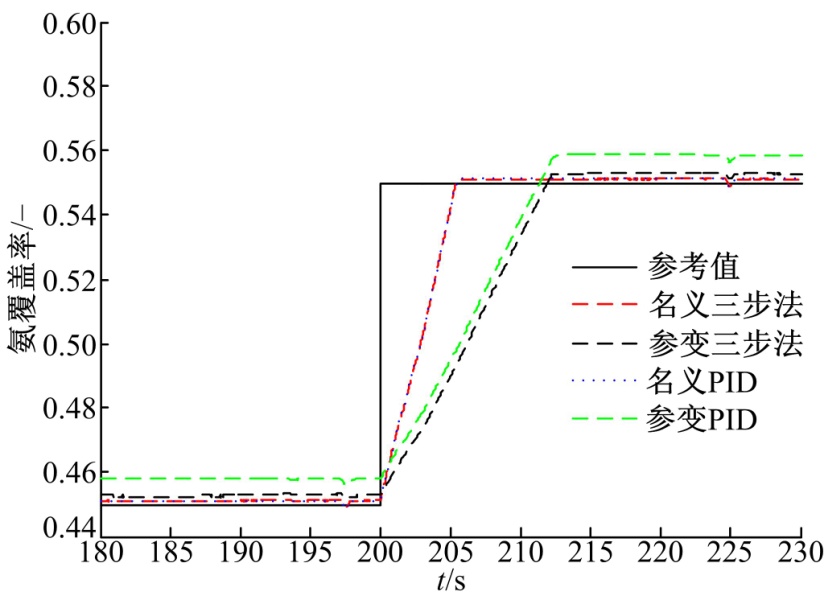
本文提出的“ 三步法” 控制器与最优PID控制器对比结果如图5~图11所示, 所有实验都是具有相同的urea-SCR系统总容积和长度。由于系统标定误差和废气温度等外部状态的可变性, urea-SCR系统参数将会在一定范围内变化。针对参数cs的100%的可变范围, 图5~图7显示了“ 三步法” 控制器与最优PID控制器之间的跟踪效果对比结果。很明显, 两个控制器在该参数的不确定性的影响下, 调节时间都增加了, 且对“ 三步法” 控制器影响较小。而且, 参数可变对最优PID控制器造成了较大的静差。因此, 相比于最优PID, “ 三步法” 控制器对参数不确定性具有更强的鲁棒性。
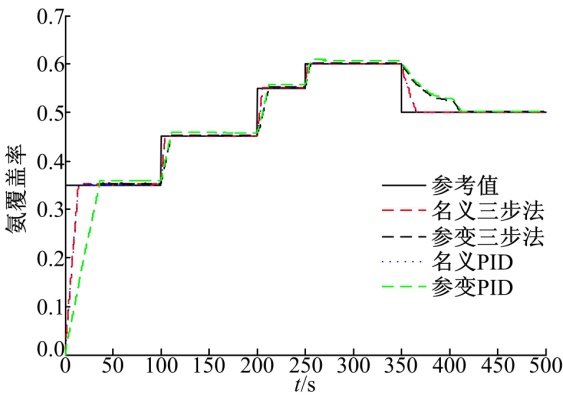 | 图5 参数可变的跟踪相应对比Fig.5 Tracking response with parameter variation |
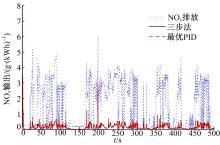
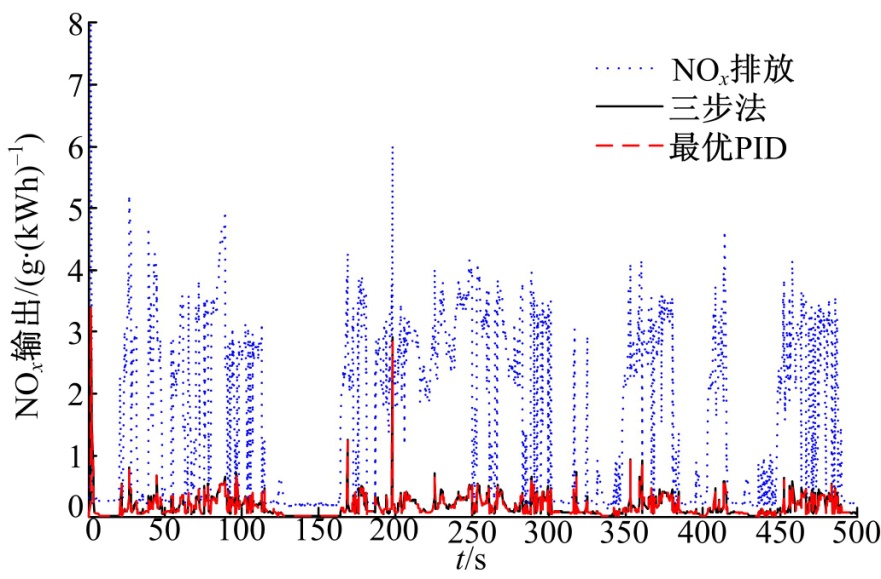 | 图8 NOx排放对比Fig.8 Comparison of NOx emission |
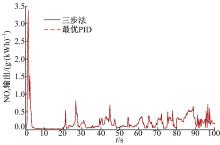
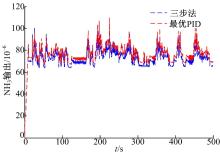
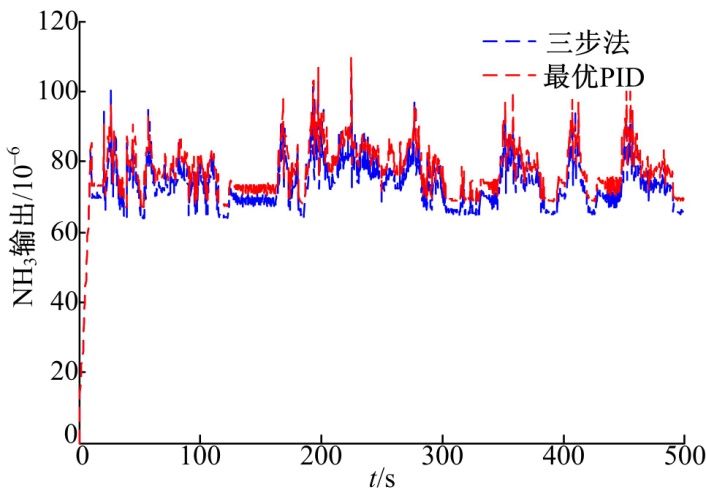
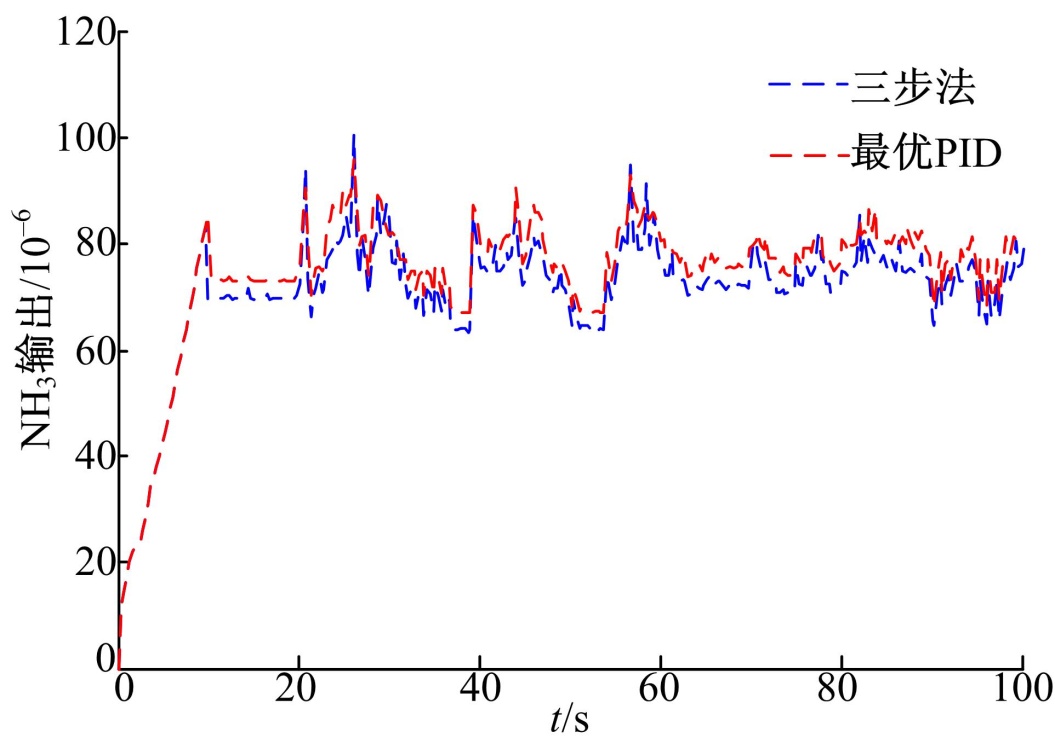
研究提出的“ 三步法” 控制器与最优PID控制器, 排放控制效果对比结果如图8~图11所示。排放控制目标为:控制NOx排放的平均水平在0.3 g/kWh以下, 并且氨逃逸在平均80× 10-6以下。由发动机排出, 进入urea-SCR后处理系统的NOx输入量与两个控制器的输出排放控制效果比较, 如图8、图9所示, 两种控制方法的转化效率都能达到90%以上, 并且控制效果基本一致。两种控制器的氨逃逸量如图10、图11所示, 所采用的“ 三步法” 控制器的控制效果明显要好很多, 相比于研究所提出的控制器, PID控制器的平均氨逃逸量要高出7%以上。并且, PID控制器的震荡更为强烈, 表明“ 三步法” 控制器具有更好的排放效果和鲁棒性。
为了同时实现较高NOx转化效率以及较低的氨逃逸率, 研究采用“ 三步法” 非线性控制技术, 设计了一款非线性控制器跟踪氨覆盖率。基于一款配有urea-SCR系统的精确的enDYNA柴油机模型, 在FTP75瞬态测试循环下, 验证了该控制器良好的跟踪性能。与最优PID控制的实验对比结果表明, 在参数不确定性的影响下, 对“ 三步法” 控制器调节时间影响较小, 且对最优PID控制器造成了较大的静差; 在NOx转化效率基本一致的条件下; PID控制器的平均氨逃逸量要高出7%以上, 并且震荡更为强烈, 本文所采用的“ 三步法” 控制器具有更好的鲁棒性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|