
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于无迹卡尔曼滤波的轮毂电机驱动车辆状态观测
[宋传学1  , 肖峰
, 肖峰1 , 刘思含2 , 李少坤1 , 段亮1 , 彭思仑1 ]
, 肖峰]
|
|


作者简介:宋传学(1959-),男,教授,博士生导师.研究方向:汽车系统动力学.E-mail:songchx@126.com
针对车辆质心(CG)侧偏角和轮胎附着力等参数无法用传感器直接测量得到的情况,本文设计了一种基于无迹卡尔曼滤波的车辆状态观测器.该方法考虑了车辆运行工况变化时的非线性因素,引入了非线性动态轮胎模型来提高轮胎侧向力的估算精度.与动力学软件AMESim建立的参考模型进行了对比仿真,仿真结果表明:本文建立的观测器能够准确估算出轮毂电机驱动汽车的状态参数.
For four-wheel independently drive in-wheel motors electric vehicle, the dynamic control systems, such as direct yaw moment control, can be easily achieved. Accurate estimation of vehicle state variables and uncertain parameters can improve the robustness of the vehicle dynamic control system. Various sensors are generally equipped to acquire the vehicle dynamics. For both technical and economic reasons, some fundamental vehicle parameters, such as the sideslip angle and tire-road forces can hardly be obtained directly by sensors. Therefore, a state observer is developed to estimate these parameters based on Unscented Kalman Filter (UKF). In addition, a nonlinear dynamics tire model is utilized to improve the accuracy of tire lateral force estimation. Compared to the reference model built in AMEsim, the simulation results show that the proposed observer can provide the precision values of the vehicle state.
随着科技的进步, 电动汽车的驱动系统也在不断的发展革新, 基于轮毂电机驱动的四轮独立驱动电动汽车就是一种突破性的驱动结构形式[1].轮毂电机驱动电动汽车可以通过对4个车轮的驱动转矩进行独立控制来实现车辆的直接横摆力矩控制(DYC).由于电机具有响应快, 控制精度高等特点, 相对于主动制动的DYC系统, 轮毂电机驱动汽车的的DYC更容易实现[2, 3].对于轮毂电机驱动汽车的DYC, 通常选择横摆角速度与质心侧偏角为受控对象, 而4个电机的驱动转矩可以作为控制输入量, 所以控制系统的输入有4个, 因此轮毂电机的DYC系统可以看成一种过自由度控制系统.过自由度控制系统能够合理地分配电机转矩, 充分利用轮胎的附着极限, 避免出现车轮滑动或抱死的现象[4].
实时而准确地获得状态变量是DYC系统研究的关键, 它能够帮助控制单元确定控制系统的控制目标, 作出合理的判断.但是由于经济, 技术等条件的限制, 质心侧偏角, 轮胎侧偏力主要通过建立观测器估算获得.建立车辆状态观测器需要考虑车辆模型的非线性因素以及车辆参数不断变化的问题, 尤其轮胎的非线性力学特性使车辆的状态在非线性区间转弯时变化非常剧烈.车辆是一个非线性系统, 因此车辆状态参数的预测多采用滑模观测, 鲁棒观测和卡尔曼滤波等算法.其中, 扩展卡尔曼滤波(EKF)应用最为广泛, 常见于对轮胎模型的辨识[5, 6].但是在实际应用中, 由于EKF主要是通过泰勒展开将非线性系统近似线性化, 引入了截断误差, 使参数的估计难以达到理想的高精度, 此外扩展卡尔曼滤波器中的Jacobian矩阵计算起来非常复杂.为了克服EKF的缺点, 牛津大学的Julier等[7]建立了无迹卡尔曼滤波(UKF)算法.无迹卡尔曼滤波是一种基于确定性采样进行变量估计的新型卡尔曼滤波器, 它的非线性性能优于卡尔曼滤波器.有学者应用UKF对车辆的轮胎侧向力, 车速等状态参数进行了估计并与EKF观测器进行了对比[8, 9, 10].但应用UKF对轮毂电机驱动汽车的状态参数进行估计的研究还比较少.基于此, 本文针对轮毂电机驱动车辆多信息源的特点, 应用UKF算法为其设计状态观测器, 并引入了非线性动态轮胎模型, 提高轮胎侧向力的估算精度.最后, 本文通过仿真试验验证了所提出的观测算法的准确性.
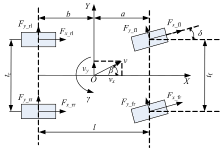
估算模型采用具有纵向, 侧向和横摆运动的三自由度双轨车辆模型.该模型可以模拟匀速转弯, 弯道加速/制动等复杂工况, 并且计算速度较快, 如图1所示.根据牛顿力学建立x、y、z三个方向上力的平衡方程:
式中:
车辆的侧偏角定义为:
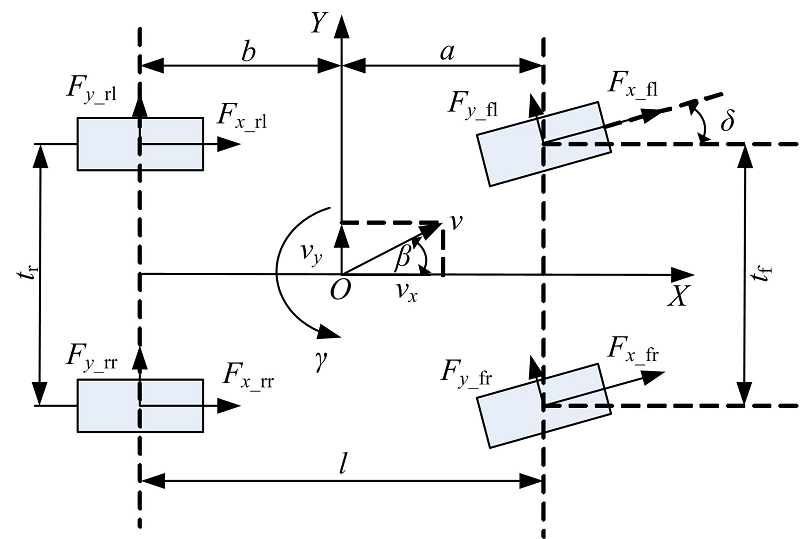 | 图1 车辆模型Fig.1 Vehicle model |
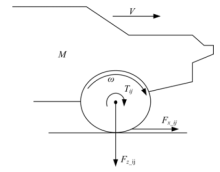
电动轮受力分析如图2所示.可以得出车轮旋转动力学方程为:
式中:
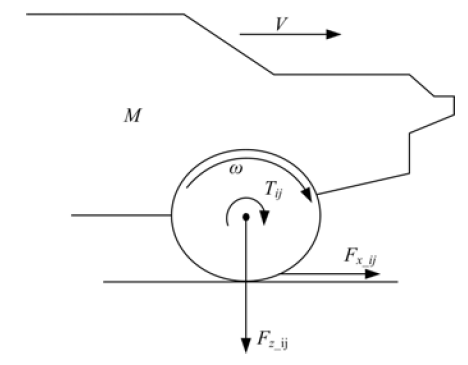 | 图2 四分之一车辆模型Fig.2 Quarter vehicle model |
由方程可以得到轮胎的纵向力为:
轮胎垂直载荷可用下式表示:
式中:
本文还需要选择合适的轮胎模型来进行侧向力估算.轮胎的侧向力受载荷, 胎压, 附着系数, 车速等多种因素影响.因此, 基于轮胎物理特性或者半经验公式的Pacejka模型, Dugoff模型等被建立来精确描述轮胎的力学特性[11, 12], 其中应用最广泛的就是Pacejka的魔术公式.但是由于魔术公式所需的参数太多, 而且有些参数不容易获得, 所以本文选择了另外一种Dugoff模型来估算轮胎侧偏力.
不考虑纵向力, 轮胎的侧偏力可用以下公式描述:
式中:
式中:
原始Dugoff模型的刚度值是不随垂直载荷变化而变化的, 但是实际上载荷的转移会影响侧偏刚度的变化[13], 所以侧偏刚度可以用一个以垂直载荷为变量的二阶多项式来表示:
式中:
侧偏刚度随着载荷的变化而变化, 可以修正Dugoff轮胎模型.
在瞬态工况下, 相对于侧偏角的变化, 轮胎侧偏力的产生会有一个迟滞效应, 这种瞬态特性可以引入一个松弛长度
式中:
非线性系统的状态估计模型可以通过状态空间方程的形式来描述:
需要观测的状态变量包括纵向速度, 侧向速度, 横摆角速度和各车轮侧向力, 定义状态变量:
测量变量包括纵向加速度, 侧向加速度和横摆角速度, 定义测量变量
车轮的纵向力可以通过轮胎旋转动力学方程(6)计算得到, 由于驱动电机的力矩和转速能够精确得到, 所以认为车轮纵向力是已知的.定义状态方程的输入变量由前轮转角和各车轮纵向力组成:
观测器的状态方程表达式为:
测量方程表达式为:
状态变量将应用UKF技术进行估计.
UKF是在卡尔曼滤波框架下运用采样方法来近似非线性函数, 因为近似非线性函数的概率密度分布比近似非线性函数更容易.UT变换是UKF的核心思想, 它采用固定数量的参数去近似一个高斯分布, 即在原状态分布中按某一规则取一些点, 使这些点的均值和协方差等于原状态分布的均值和协方差, 然后将这些点代入非线性函数中, 得到相应非线性函数值点集, 通过这些点集求取变换后的均值和协方差.利用UKF估计轮毂电机驱动车辆状态的步骤如下:
(1)状态方程离散化.将状态方程式(15)离散化后得到的离散状态方程如下所示:
式中:
(2)初始化滤波器
考虑系统噪声和测量噪声, 定义扩展矢量
(3)Sigma点采样
Sigma点权值:
式中:
选择合适的变量
(4)UKF递推滤波计算
时间更新:
测量更新:
为了验证UKF算法的观测效果, 本文在车辆动学软件AMEsim中进行仿真试验.车辆模型中输出的车辆状态可以作为真实值.车辆横摆角速度, 车辆侧向加速度与纵向加速度可以作为输入量传递至观测器, 最后将观测器中估计的轮胎侧向力, 质心侧偏角等状态参数值与车辆模型中的真实值进行对比, 验证UKF算法的观测效果.本文分别在附着系数为0.9和0.3的高, 低附着路面上进行双移线试验, 仿真试验步长为1 ms.
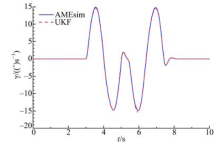
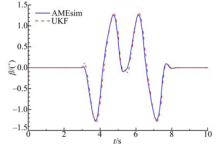
车速为80 km/h, 路面附着系数为0.9.图3为横摆角速度的估计结果, 由于横摆角速度可以直接在传感器中获取, 所以有很高的估计精度, 收敛非常快.图4为质心侧偏角的估计结果, 从图中可以看出, 估计值与参考值趋势一致, 吻合良好, 侧向激励较大时, 估计值会略有误差.图5为轮胎侧向力的估计结果.观测值与参考值的误差很小, 只有在波峰和波谷处会略有增大.
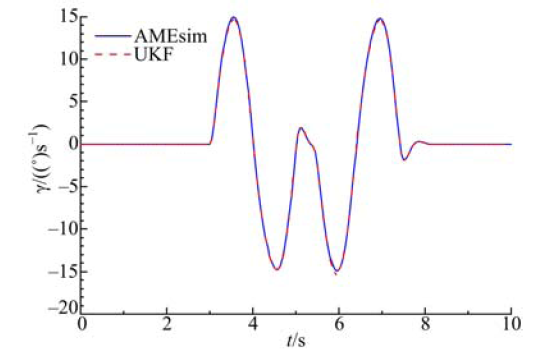 | 图3 横摆角速度估计结果(高附着)Fig.3 Estimation of the yaw rate(high adhesion) |
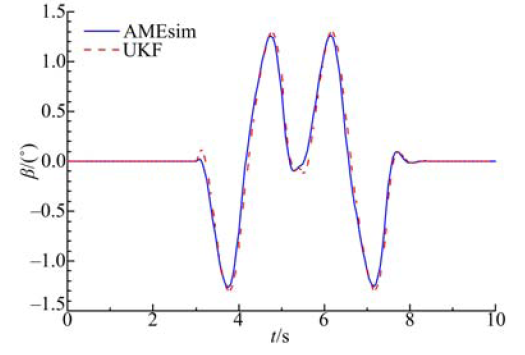 | 图4 侧偏角估计结果(高附着)Fig.4 Estimation of the sideslip angle at CG(high adhesion) |
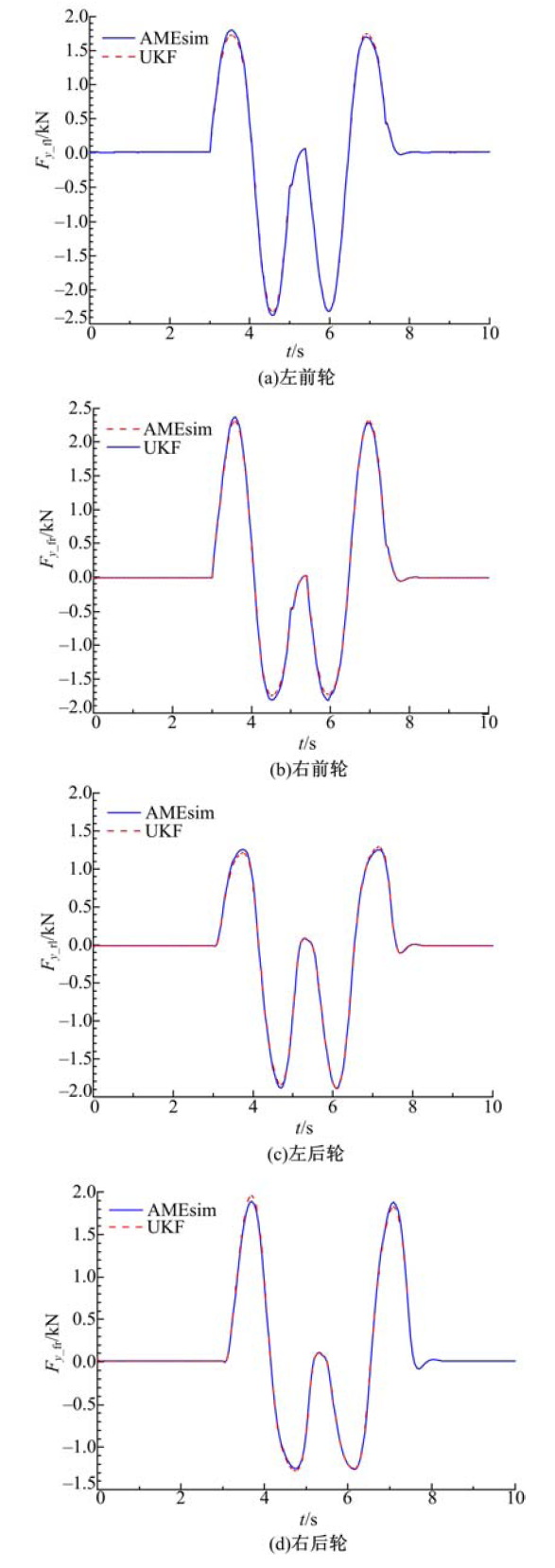 | 图5 侧向力估计结果(高附着)Fig.5 Lateral force of tire(high adhesion) |
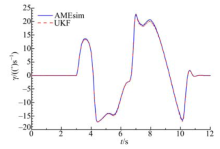
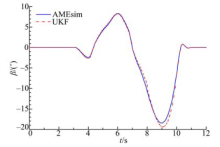
车速为80 km/h, 路面附着系数为0.3, 此路况下进行双移线工况试验, 车辆会处于非线性运动阶段.图6中, 在低附着路面下, 横摆角速度的估计值仍具有很高的精度, 为质心侧偏角的准确估计奠定了良好基础.由图7可以看出, 质心侧偏角的观测值能很好地跟踪车辆模型的输出值, 在8~10 s, 质心侧偏角最高达到了19° , 车辆已经进入了非线性区间.
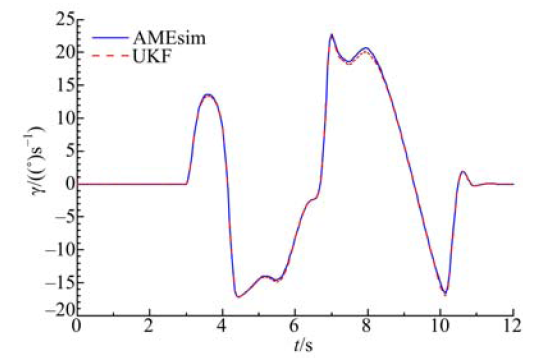 | 图6 横摆角速度估计结果(低附着)Fig.6 Estimation of the yaw rate(low adhesion) |
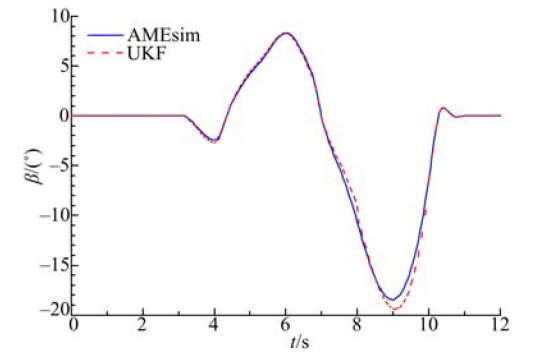 | 图7 侧偏角估计结果(低附着)Fig.7 Estimation of the sideslip angle at CG(low adhesion) |
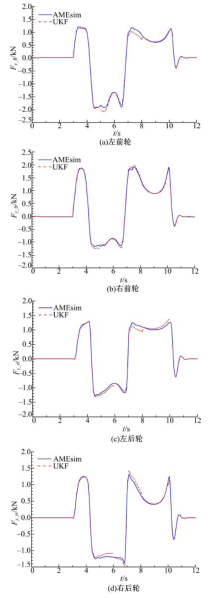
图8为轮胎侧偏力的观测结果.误差较大的地方出现在质心侧偏角较大区域, 此时轮胎与地面关系进入非线性区间, 轮胎受力趋势发生了改变, 所以影响了观测结果.
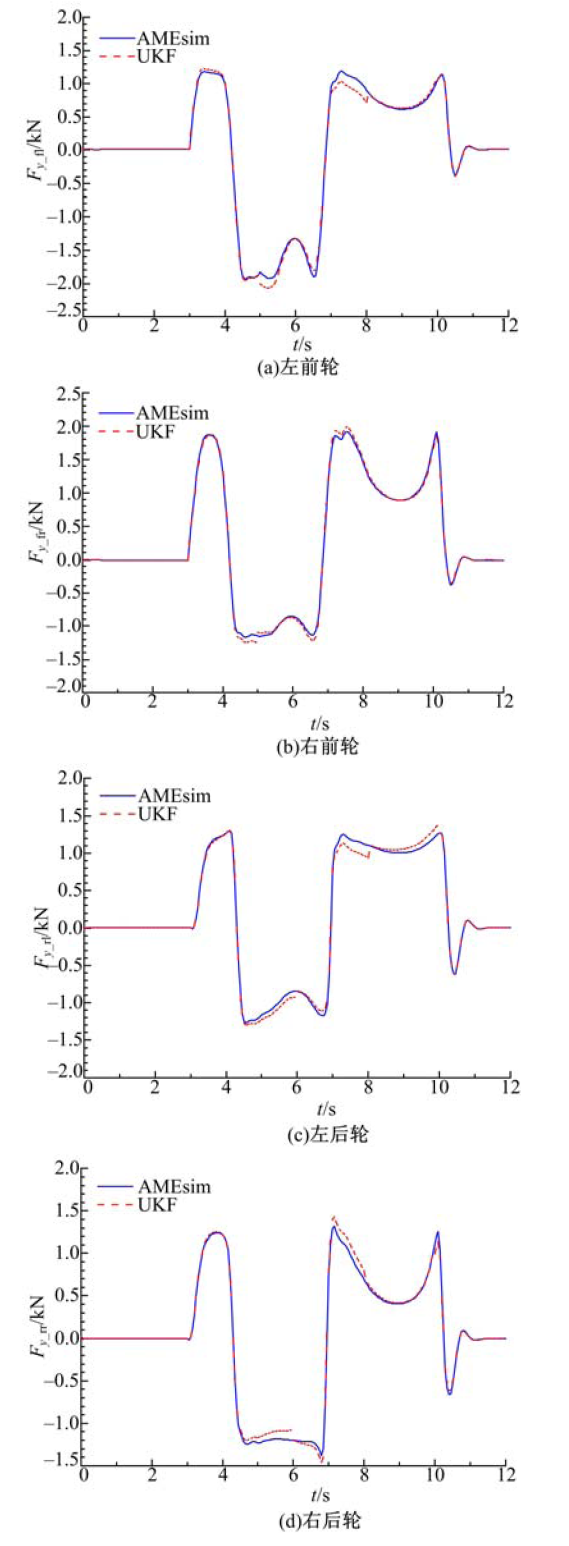 | 图8 侧向力估计结果(低附着)Fig.8 Lateral force of tire on(low adhesion) |
利用轮毂电机驱动汽车的特点, 建立了车辆动力学模型, 应用非线性性能更优秀的UKF算法设计了车辆状态观测器.仿真结果表明, 观测器能够有效估计车辆在非线性区间内的质心侧偏角和横摆角速度, 并达到了较好的精度.轮胎力计算的精确度是车辆状态观测的重要因素, 本文在侧向力的观测计算中, 引入了考虑动态特性的修正Dugoff轮胎模型, 对运动状态下的轮胎侧向力可以进行有效估计.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|