

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
不同车速下驾驶员变换车道前视行为特征规律
[高振海1, 2  , 李扬
, 李扬1 , 张慧3 , 张利丹1 , 胡宏宇1 ]
, 李扬]
|
|


作者简介:高振海(1973-),男,教授,博士生导师.研究方向:驾驶员驾驶行为规律.E-mail:gaozh@jlu.edu.cn
为探究不同车速下驾驶员视觉行为规律,进行了驾驶员变换车道实车试验。分别采集城市交通和环城高速公路下的驾驶员眼动信息、车辆状态以及道路环境信息等,从视觉搜索广度、换道前预瞄距离、视线转移概率等多角度综合归纳驾驶员在不同车速下变换车道过程的眼动规律。揭示了驾驶员在复杂的交通环境中的前视行为变化规律,为完善考虑真实驾驶员视觉特征变化的换道辅助驾驶系统提供了理论依据。
To study the pattern of driver's visual behavior during lane change under different speeds, several driving experiments were carried out on the civil road and on highway. The vehicle state, the environment information and the driver's eye movement information were acquired. The regular pattern of the driver's eye movement was summarized using the visual search range, the forward-looking distance and the visual transition probability during lane change. The pattern of the driver's forward-looking behavior in complex environment was revealed, which could provide theoretical support for lane change assistant system with consideration of real driver's visual characteristics.
行车过程中驾驶员通过视觉判断道路环境信息, 分析驾驶员在换道过程的前视行为, 可有效表征驾驶意图, 在人-机交互中实现具有人类视觉参考性的生理特性指标, 完善现有的智能辅助驾驶系统。国内外学者对驾驶员动态视觉特性已有一定的研究, 常用的指标包括注视时间、眼跳时间、眼跳距离、视力角等。Henning等[1]提出利用转向信号灯与后视镜的注视特性判断驾驶员变道行为; Lethaus等[2]利用FaceLab动态采集驾驶人向左换道、向右换道以及超车时的眼动数据, 认为眼动行为在时序上领先于驾驶人的操作行为, 因此可以作为预测驾驶人意图的指标; Olsen等[3]将驾驶员在换道过程中的注视区域划分为6个部分, 并分别计算了每个区域的注视概率和视线转移概率, 从而得出最受驾驶员关注的位置; Doshi等[4]把驾驶员换道过程中的注视点划分为9个注视区域, 研究向左换道前与直行过程中的注视特性差异, 认为在设计换道辅助系统时应把提示装置安装在侧后视镜或内后视镜区域, 以便于驾驶人及时发现示警信号。国内袁伟等[5]提出驾驶员视觉搜索模式的模糊聚类评价方法, 总结了4种驾驶员搜索模式; 陆建等[6]利用驾驶员视觉特性变化规律修正路段同行能力参数, 从而指导路段同行设计。研究驾驶员视觉特性, 将人-车系统中驾驶人的特性应用于指导驾驶辅助系统的设计, 更符合驾驶员视觉行为习惯和行车安全。然而, 视觉行为具有多变和复杂特性, 在智能辅助驾驶系统逐渐考虑驾驶员视觉特性的同时, 也应更全面地考虑视觉信息随环境变化的随机性和多变性。
车速对于驾驶员视觉判断有一定的影响, 视觉行为在不同车速下呈现出不同规律。研究中很少提及不同车速下驾驶员换道过程的视觉规律行为。因此本文利用眼动仪采集了驾驶员在真实城市交通与高速公路道行驶过程的换道时刻眼动和车辆参数, 引入表征驾驶员注视行为统计学规律参数。分别计算了不同车速下驾驶员水平视线搜索广度、视线转移概率等, 并提出驾驶员换道过程前视预瞄距离计算分析方法, 综合判断驾驶员换道过程的前视行为。本文结合驾驶员操纵信息和驾驶员视觉特性, 从不同车速的操纵情况下分析驾驶员换道行为, 细化了以往的视觉分析规律, 为完善评价现有的换道辅助驾驶系统提供理论依据。
为方便探究驾驶员换道行为眼动规律, 试验装置采用瑞Smart Eye非侵入式眼动仪, 采样频率为60 Hz, 另外, 安置摄像头实时监测驾驶员换道过程中的不同姿态, 如图1所示。
 | 图1 驾驶员换道过程中不同姿态行为片段Fig.1 Driver's different behaviors during lane changing |
试验场地选择交通拥挤情况适中的城市交通道路和环城高速, 分别测试了8名驾驶员(行驶超过5万公里, 驾龄超过5年)。试验中一共采集到换道有效数据1112组, 其中左侧换道数据662组, 右侧换道数据450组。参照回放的视频信息和原始数据记录每一次换道过程时间, 整个换道过程划分为驾驶员保持车道直行
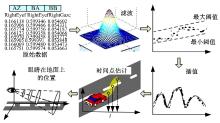
在真实驾驶过程中测量仪器会受到一定的震荡, Christer等[10]在研究中也发现经过处理过的眼动数据的精确度反而增强。因此本文将数据处理分为数据滤波、定义最大和最小阈值、差值处理等步骤, 如图2所示。最后, 按照本文的换道时间点截取有效时间窗内数据, 计算视觉行为变化规律。图3为原始数据与处理后数据对比图。本文对眼动参数的相关阈值设置如下:视角偏差阈值为2° ; 注视时眼球运动速度阈值为15 ° /s, 即注视行为眼球运动的最高速度; 眼跳时眼球运动速度阈值为35 ° /s, 即眼跳行为眼球运动的最低速度; 注视持续时间阈值为200 ms。
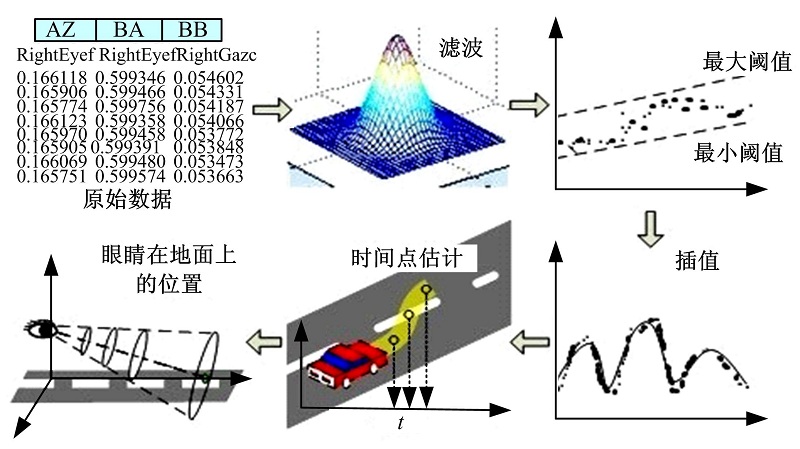 | 图2 数据处理流程图Fig.2 Flow chart of data processing |
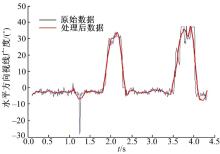
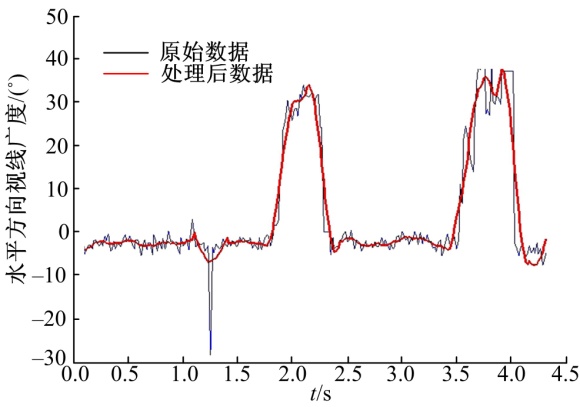 | 图3 原始数据与处理后数据对比示意图Fig.3 Contrast of the original data and the processed data |
由于实车试验无法避免车内震荡情况, 因此偶尔数据会产生较大“ 失误” , 通过本文数据处理方法后可及时剔除“ 失误” 数据, 有效提高数据可靠性。例如, 图3中1.25 s时刻数据发生大幅度跳变, 这一剧烈变化有可能是一次有意义的注视行为, 也可能是一次由于车内震荡产生的无效数据, 但经过眼动数据阈值设置后可断定为意外异常数据并将其忽略。
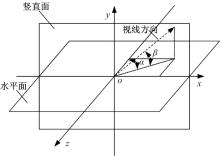
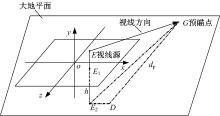
在换道过程中驾驶员由于需要注视后视镜等位置, 因而其水平视线方向搜索行为尤为重要。定义世界坐标系如图4所示, 其中
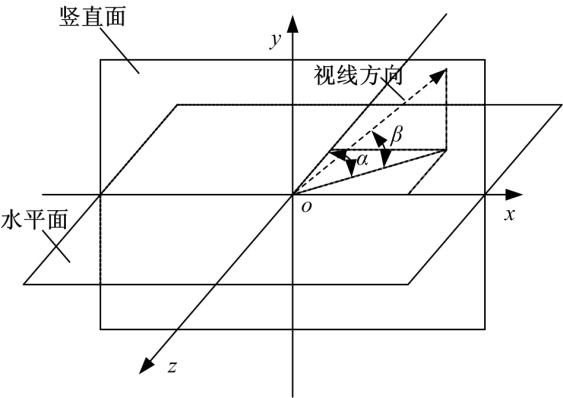 | 图4 眼动仪世界坐标系以及视线方向角示意图Fig.4 World coordinate system of eye tracker and the sight direction angle |
式中:GazeDirection.x、GazeDirection.z分别为世界坐标系内视线方向单位向量的
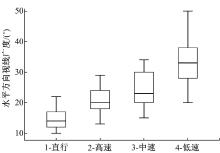
换道过程中水平方向视觉搜索模式从一定程度上可以反映驾驶员的信息收集程度[8]。水平视线广度均值可反映驾驶员一般搜索模式的水平广度规范信息, 图5为各个速度区间水平视线搜索广度的箱线图, 每个速度下的视线水平搜索广度包括左侧和右侧换道过程, 其中高速定义为80~100 km/h, 中速定义为40~80 km/h, 低速定义为10~40 km/h。如图5所示, 直行时水平搜索广度均值在14° 左右, 直行时所需要的道路信息较少, 因此视觉搜索范围也较窄, 驾驶员视线主要停留在正前方位置。
 | 图5 水平视线搜索广度箱线图Fig.5 Gaze search breadth |
换道时随车速的增加驾驶员水平搜索广度不断降低, 按照高速、中速、低速排列其水平方向视线广度均值分别为33° 、23° 、20° 。经回归分析可知, 驾驶员在换道过程中随车速的增加注视视野随之呈线性减少, 由此可推断城市交通中不同速度影响了驾驶员水平视线的搜索广度。低速行驶造成了驾驶员的水平视觉搜索广度的增加, 为驾驶员增加了视觉负荷任务。随着车速的增加(交通环境的改善)驾驶员可适当降低视觉水平搜索任务。
前视预瞄行为可指导汽车未来行驶轨迹, 即汽车未来行驶运动轨迹, 也就是说, 一般情况下预瞄点可落在未来行驶轨迹上。换道过程中前视预瞄点的确定可有效描述驾驶员换道过程预瞄特性[11], 预测和指导完成换道行为。根据世界坐标系内视线方向和视线源位置数据, 计算出预瞄点在世界坐标系内位置如图6所示, 由勾股定理可推出其相对驾驶员的距离(即预瞄距离), 忽略车辆的侧倾以及俯仰, 利用式(2)可计算得出不同车速下各组预瞄距离的详细数据, 如表1所示。
式中:
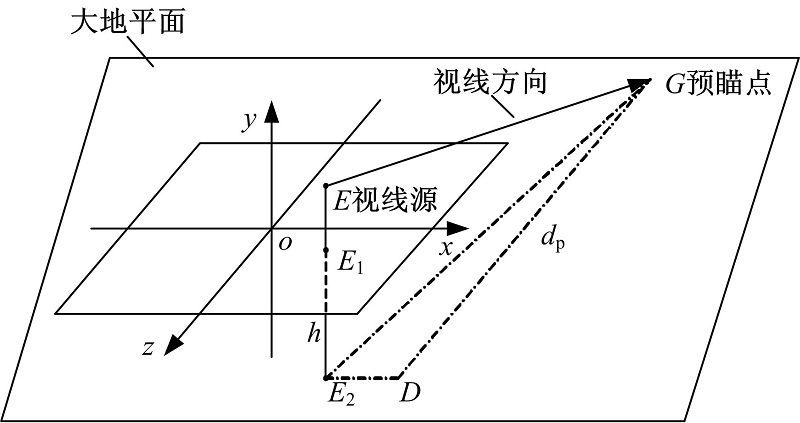 | 图6 预瞄距离计算示意图Fig.6 Forward-looking distance |
| 表1 不同车速下前视预瞄距离规律 Table 1 Preview distance at different speeds |
低速行驶中向左侧、右侧换道的预瞄距离相差0.567 m, 利用
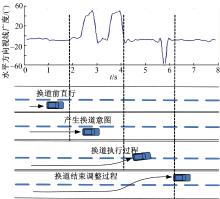
驾驶员视线转移概率可表征驾驶员在空间位置上的视觉观测转移程度, 即驾驶员从一个位置观测到另外一个的位置的概率。在变换车道过程中为保证驾驶安全驾驶员通常在变换车道前视线的水平方向会有大幅度的转移变化, 频繁观测左、右后视镜等。图7为某一次左侧换道过程中驾驶员水平方向上的视线关注角度, 在保持直行阶段驾驶员直视前方, 当驾驶员产生换道意图时水平注视角度开始呈现大幅度的变化, 连续两次(2.25 s和3.3 s时刻)观测左侧后视镜(从注视角度可判断)后目光又放置在驾驶前方完成换道执行过程, 上文中的预瞄点就是在这一阶段选取, 几乎所有驾驶员在执行换道(换道决策阶段)开始时刻目光都落到前方车道线附近, 并发生一次眼跳, 如4.12 s时刻, 将这种较为普遍的前视行为作为预瞄点的选取依据。通常在变换到临近车道后驾驶员也会观测某一方向后视镜以确定是否处于安全车距, 如图7在5.8 s时刻水平视线向右侧观测后视镜出现大幅度的一次眼跳。换道后驾驶员通常保持注视前方视觉行为。
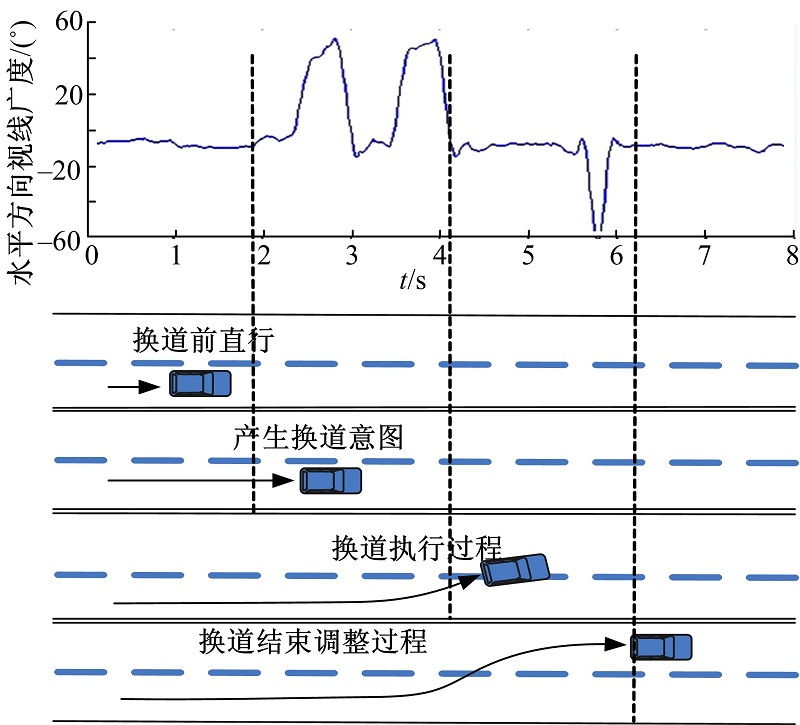 | 图7 换道过程不同时刻水平注视角度变化曲线Fig.7 Horizontal gaze angle during lane changing at different time |
在研究过程中发现, 视觉行为较驾驶员其他行为更为复杂在于它的多变性, 为在错综复杂的视线规律中找到普遍特性, 国内外曾有人提出利用视线转移概率特性表征视线搜索转移策略机制[3, 4, 5, 6, 7, 8, 9]。存在的不足是试验中未考虑车辆状态或者环境影响, 而试验车速的变化也在一定程度上影响了驾驶员的换道行为。因此, 研究换道过程视线转移行为应考虑不同车速下对其变换车道的影响变化, 揭示车辆状态或环境影响对驾驶员换道行为的影响程度。
以城市交通中最普遍的低速(10~40 km/h)行驶为例, 描述换道过程中右侧和左侧换道意图阶段注视转移路径示意图如图8所示。截取一段换道时间内(如图7中2~4 s间换道意图阶段)观测注视点在水平与垂直方向上空间分布规律。
 | 图8 低速行驶驾驶人在产生意图阶段的注视路径转移示意图Fig.8 Gaze path transition at low speed with lane changing intention |
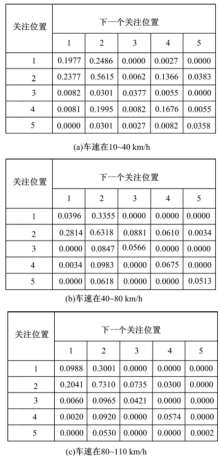
根据视频回放、眼动和车辆数据, 筛选出换道前不同速度下的眼动数据并从数据和视频中注意到驾驶员常注意位置有正前方、后前方、左侧后视镜、右侧后视镜等。因此, 选取如下具有代表性的特征参量:1-左侧后视镜; 2-正前方; 3-右侧后视镜; 4-右前方; 5-其他。计算驾驶员在换道决策阶段视线观测5个典型位置的概率及视线观测到下一个位置的转移概率。图9为以左侧换道为例给出不同车速下的驾驶员换道视线转移概率模型。
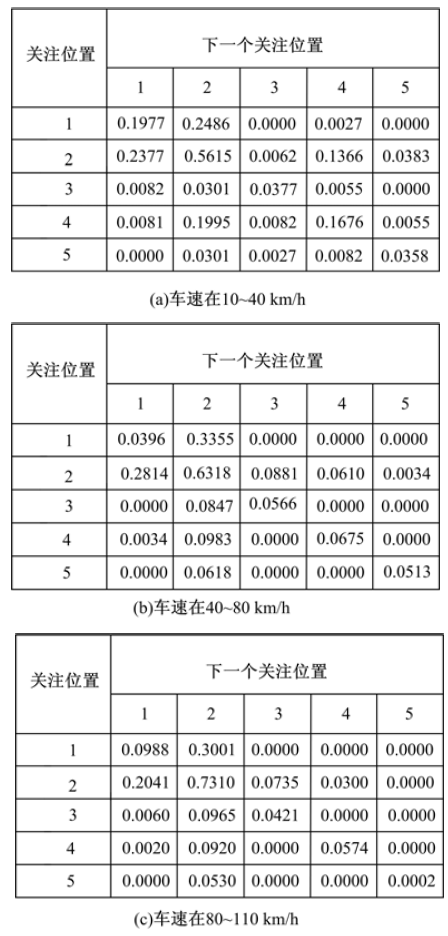 | 图9 换道前视觉关注位置概率Fig.9 Gaze probability of different locations before lane change |
根据驾驶员不同速度下对驾驶舱内不同位置的角度测量和平均注视频率可计算相应关注位置的概率特性。由图9可知, 从视觉转移机制上看, 驾驶员在低速行驶时视觉注意力较分散, 其注视正前方位置概率为0.5615, 在高速行驶时注意力较集中, 其注视正前方概率达到0.7310, 而中速行驶时前方注视位置概率为0.6318。随着车速增加, 前方注视概率增加, 而左、右后视镜的注视概率逐渐减小。环城路交通环境单一很容易让驾驶员忽略周围环境信息, 视觉任务负荷下降。其他速度下也有相似的驾驶员视觉转移制特性规律, 这里不再赘述。
(1)利用统计学方法计算得出直行水平注视角度均值为14° , 从高速到低速分别为20° 、23° 和33° , 随车速的增加水平搜索广度减少。
(2)前视预瞄距离随车速增加而线性增加, 分别从左侧换道前视预瞄距离9.586 m上升到19.503 m, 右侧换道从10.153 m上升到18.932 m。
(3)建立了不同车速下的视线转移概率模型。驾驶员在高速驾驶时对左、右后视镜的观测概率低于低速行驶阶段。驾驶员的视觉转移概率模型可指导和规范新手驾驶员的换道行为, 避免因视觉搜索差异而引起的交通事故。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|