


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
电动汽车侧向换道行驶主动避撞控制算法
[田彦涛1, 2  , 王晓玉
, 王晓玉1 , 胡蕾蕾1 , 廉宇峰1 , 赵云1 , 尹诚3 ]
, 王晓玉|
|


作者简介:田彦涛(1958-),男,教授,博士生导师.研究方向:复杂系统建模、优化与控制.E-mail:tianyt@jlu.edu.cn
为实现四轮独立驱动电动车的侧向主动安全避撞控制,建立了车辆侧向换道的安全距离模型,在此模型基础上依据避撞要求设计了相应侧向控制器。利用线性二次型调节器(LQR)方法求解出侧向换道最优反馈矩阵,并采用基于输入补偿的前馈补偿策略对系统进行偏转角控制跟踪,保证系统能精确跟随给定期望横摆角。最后,通过实验验证了电动车主动安全距离模型和车辆避撞控制器的有效性,实现了车辆安全稳定避撞功能要求。
In order to achieve lateral active safety collision avoidance control of four-wheel independent drive electric vehicle, the safety distance model in vehicle lateral lane-change is proposed. On the basis of the proposed safety distance model, an appropriate lateral controller is designed, which meets the collision avoidance requirements. The Linear Quadratic Regulator (LQR) method is used to solve the optimal feedback matrix of the lateral lane-change. Then, the feed-forward compensation strategy based on input offset is taken to track the slip angle, so that the system could accurately follow the given expected yawing angle. The electric vehicle active safety distance model and the effectiveness of the vehicle collision avoidance controller are verified by experiments. The strategy realizes the safety and stability function requirements of the vehicle collision avoidance system.
近年来, 车辆主动安全控制的研究和开发日益引起汽车研发人员的重视[1]。侧向换道是一种有效地针对前车阻碍导致碰撞危险的主动避撞方法。安全车距模型是进行安全状态判断的前提, 为提高避撞系统的安全性能, 本田公司在传统安全距离模型基础上, 分别建立了报警临界距离和制动临界距离[2]。马自达公司考虑了系统和驾驶员的延迟时间, 深入研究了预警安全距离和制动临界距离的计算, 并提出更为精确的计算方法[3]。考虑到换道过程中行车平顺性和安全性, Ruder等[4]开发了一套辅助换道系统HLCAM(Highway lane change assistant monitor)。系统实时对车辆行车环境做出探测, 判断是否存在危及本车安全的可能危险, 一旦存在, 自动警告驾驶员注意。对于侧向安全控制器的设计, Lin等[5]在传统车辆二自由度动力学模型基础上采用最优理论设计换道控制器, 并对不同车速下的换道过程进行了仿真分析。Hessburg等[6]在考虑分析驾驶员经验数据基础上建立了模糊规则库, 并设计了车辆换道模糊控制器。国内学者付锐等[7]以道路实验数据为基础, 确定驾驶人换道时的安全间距, 建立了对本车与周围车辆的换道预警规则; 王荣本等[8]对车辆碰撞条件、换道最小安全距离进行了研究; 李寿涛等[9]采用模糊逻辑控制方法对汽车转向稳定性进行了研究。
制动安全距离模型的研究通常是针对纵向, 忽略了侧向换道避撞的策略, 同时, 常规避撞控制器大多存在鲁棒性差、驾驶员特性考虑不足等缺陷。本文提出了一种基于侧向换道的四轮独立驱动电动汽车主动避撞策略, 建立了综合考虑驾驶员特性和路面摩擦力影响因素的安全车距模型, 并设计具有鲁棒性的主动避撞控制器。
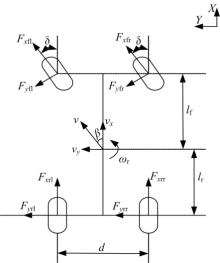
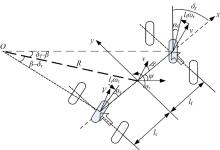
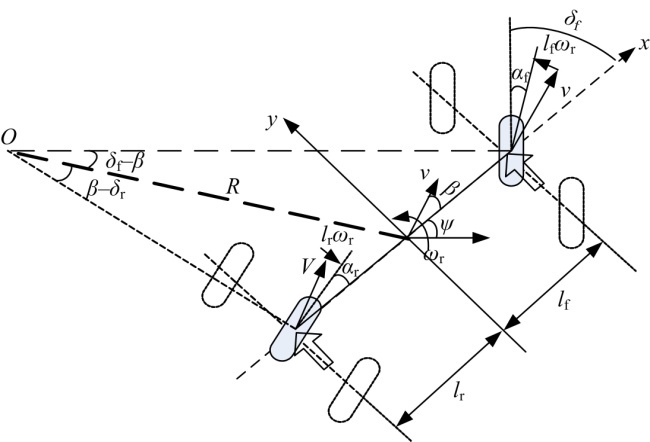
为了实现车辆安全稳定控制, 建立合适的车辆动力学模型是进行电动车主动避撞研究的基础。本文采用7个状态量对电动汽车行驶状态进行完整表征, 如图1所示[10]。电动汽车动力学模型的建立基于以下假设:①两个前轮、后轮的轮距一致, 悬架特性忽略不计; ②车辆纵向与侧向的俯仰角和侧倾角忽略不计。
 | 图1 纯电动汽车7自由度模型Fig.1 Pure electric vehicle model of 7 degrees-of-freedom |
基于上述分析, 电动车的动力学方程和力矩平衡方程如下:
沿
沿
横摆力矩平衡方程:
式中:
基于式(1)(2)(3), 车辆行驶过程中的侧向驱动力可依据安全距离模型的纵向期望加速度
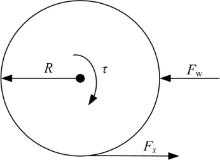
如图2所示, 为了保证车轮的稳定性, 车轮在行驶过程中需要保持力矩平衡状态。以任意一个车轮为例, 单个车轮力矩平衡方程为:
式中:
 | 图2 单个车轮在行驶中的受力情况Fig.2 Single wheel force in driving |
轮胎侧偏角为:
轮胎受到的侧向力和回正力矩可由轮胎模型的魔术公式获得。当侧向加速度≤ 0.4g(g=9.8 m/s2), 侧偏角≤ 5° 时, 魔术公式对常规轮胎具有很高的拟合精度[11]。
安全距离模型需综合考虑诸多因素的影响, 满足如下特点[12]:①具有一定适用性, 能适用大多数路况; ②模型参数容易获取; ③计算简便、能快速运算; ④符合驾驶员一般操作特性, 并尽可能实现驾驶舒适性。
侧向换道行为是车辆在高速交通系统中常采用的策略, 但不当的换道行为会引发车辆碰撞事故或交通拥挤等。
(1)侧向换道安全距离模型建立
本文以被控车(F车)与目标车道前车(B车)为例分析换道模型建立条件。由于换道情况复杂, 为了简化模型, 首先作如下假设:①忽略车辆在减速/加速过程中加速度变化过程; ②所有车规格相同, 即长度、宽度都相同; ③换道过程中, F车纵向分运动与侧向分运动相对独立。
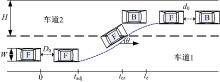
车辆侧向安全换道示意图如图3所示。侧向安全距离模型建立中涉及的相关参数如下:tadj为车进行侧向换道行为起始时刻; tcr为到达最大临撞点时刻; te为安全完成换道时刻(
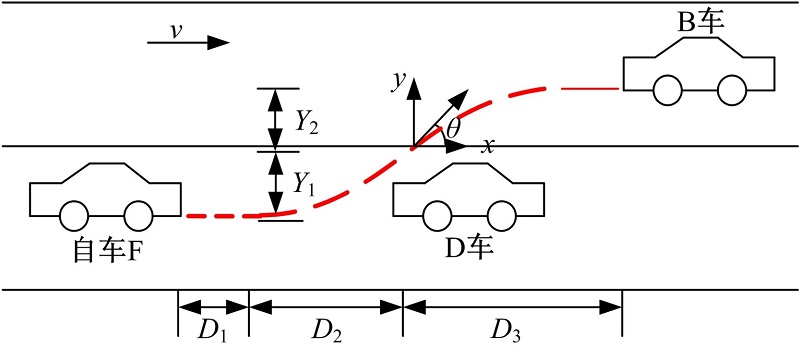 | 图3 F车侧向安全换道示意图Fig.3 Schematic diagram of F car lateral safety lane-changing |
基于换道过程中侧向速度的变化趋势, F车的侧向加速度采用正弦函数车道变换模型[13, 14], 相关横向加速度、横向速度、换道轨迹模型分别为:
(0, tadj)阶段:驾驶员以一定减速度aadj减缓车速, 为换道做准备工作。在t=tadj时刻, F车的速度、位移与两车当前间距表达式为:
(tadj, tcr)阶段:F车开始进行侧向换道, 纵向速度不变, 车辆的运动轨迹为纵向和侧向的合成运动。F车速度和距离表达式如下:
(tcr, te)阶段:F车已经进入相邻车道, 基本完成换道避撞行为, 适应相邻车道上车辆的整体行驶状态。
综合上述分析, 在整个安全换道过程中, F车侧向换道的安全距离为:
式中:
(2)换道中安全性条件分析
为了提高系统安全性, 需要明确车辆行驶转角
 | 图4 F车与B车换道过程Fig.4 F car and B car lane-changing process |
以
考虑到一般性, 式(14)可改写为:
可见,
(1)F车匀速换道情况, 车道上所有车辆都匀速行驶
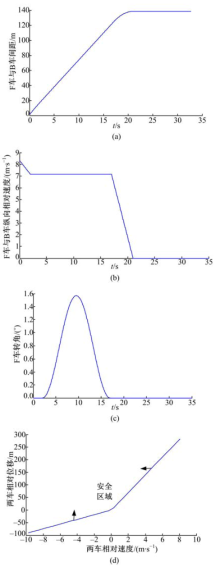
初始参数为:D0=1 m, vB=vD=40 km/h, vF=70 km/h, T=35 s, yB=0.9H, tadj=2 s, aadj=-0.588 m/s2。F车在安全换道策略下的各个参量变化如图5所示。
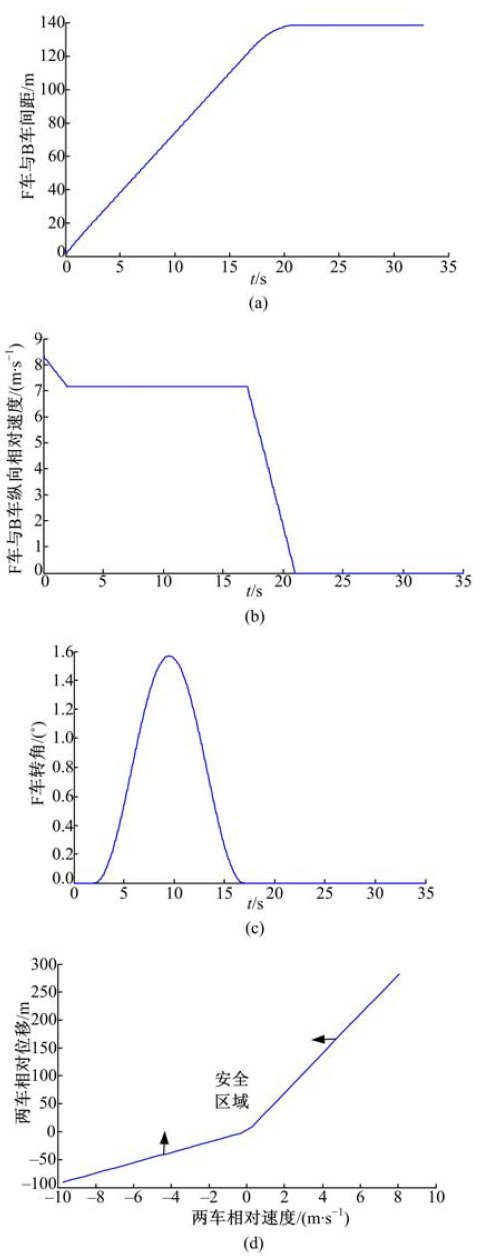 | 图5 一般情况下F车匀速换道仿真图Fig.5 In general, F car lane-changing simulation figure with a constant speed |
图5(a)(b)(c)表明, t=0 s时, F车与D车间距1 m, 初始相对速度为30 km/h, 选择换道避撞方式。经2 s的车速车姿调整阶段后, 车辆开始转向; 在t=9.86 s时, F车转角达到最大值; 在t=17.61 s时, F车转角
(2)F车在换道过程中进行纵向变速运动, 其他车进行纵向匀速运动
初始参数为:D0=1 m, vB=vD=40 km/h, vF=70 km/h, T=35 s, yB=0.9H, tadj=0 s, aadj=-0.588 m/s2。F车在上述安全换道策略下的各运动状态量的变化如图6所示。
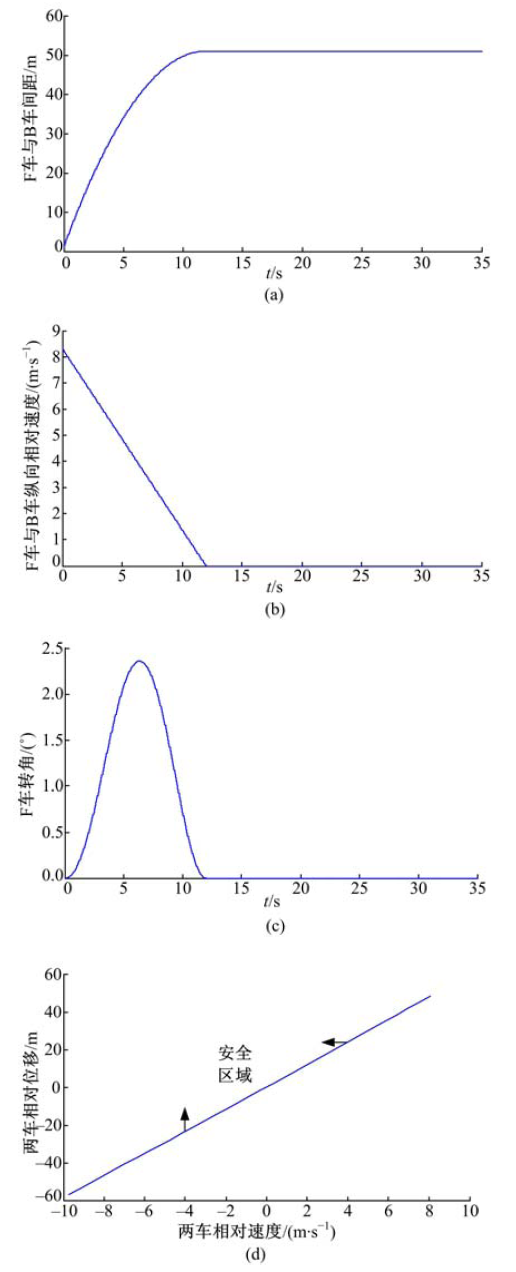 | 图6 tadj=0时F车匀减速换道仿真图Fig.6 when tadj=0, F car deceleration lane-changing simulation figure |
图6(a)(b)(c)表明, t=0 s时, F与D车间距1 m, 初始相对速度为30 km/h, 由于纵向间距不足以实现纵向制动过程, 因此选择换道避撞方式。当F车不经历车速车姿调整阶段, 在t=0 s时刻直接开始做边减速边转向运动, 则车辆转角逐渐增大; 在t=6.88 s时, F车转角达到最大值, F车纵向车速为3.62 m/s; 在t=12 s时, F车转角又归于0, 表示F车已经换道到相邻车道, 成功避开D车; F车进入相邻车道后仍然需要继续减速, 直至在t=12.45 s时F车与B车相对速度为0, 两车保持合适间距匀速行驶, 整个换道过程结束。
对比图5和图6可以看出, 换道中减速行驶比起匀速行驶安全区域会减小。但减速换道比匀速换道需要的时间更少, 能更快速地实现换道过程。
从安全性、快速性、稳定性以及行车舒适性角度看, 控制系统应具有如下特点:①能快速、准确地响应驾驶员针对当前路况做出的决策指令; ②具有较好鲁棒性, 受行驶环境变化与车辆状态的影响较小; ③易于操作, 符合驾驶员操作特性。
(1)侧向车辆动力学模型线性化
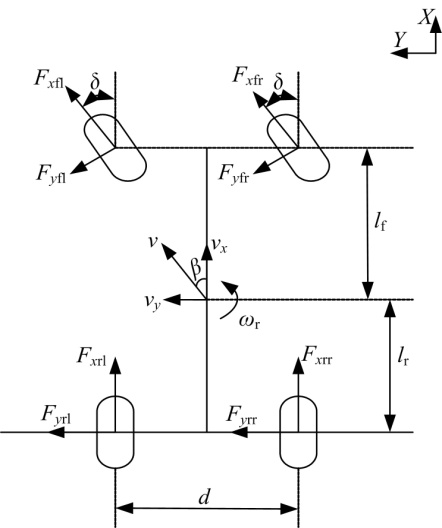
假设当车辆以较小角度转向换道时, 车辆两前轮与两后轮的转向动作分别保持一致。此时电动汽车模型等效为自行车模型进行研究, 如图7所示。
 | 图7 二自由度车辆线性动力学模型Fig.7 Two degrees of freedom vehicle linear dynamic model |
侧向加速度
由图7可知, 当轮胎侧偏角较小时, 轮胎侧向力与轮胎侧偏角近似呈线性关系。得到前轮、后轮侧偏力分别为:
式中:
综合以上分析, 得到简化自行车模型的车辆动力学状态方程为:
通过对自行车模型分析可知, 车辆的侧向控制主要是由车轮侧偏角
为了能对车轮实际换道轨迹进行跟踪, 车辆模型需要建立关于误差状态量的状态方程, 车辆期望行驶方向为ψ des, 得到:
式中:
定义侧向系统的状态
(2)基于前馈补偿的LQR侧向控制
车辆侧向运动控制主要是通过对侧偏角
车辆转向过程中, 侧向控制器应对车辆期望横摆角度ψ des迅速精确跟踪, 可用线性二次型调节器LQR进行优化, 减少系统控制误差并提高控制性能[15]。
基于车辆侧向动力学模型(21), LQR的性能指标为:
根据LQR理论, 性能指标
通过求解黎卡提方程, 基于LQR的状态反馈控制器为:
通过对引入LQR反馈控制后的模型(22)进行分析, 系统在达到稳态时将存在稳态误差, 状态误差
可见, 系统稳态时的误差
在系统能够快速达到稳态的条件下, 基于输入补偿的前馈补偿控制器
式中:
为了实现上层侧向换道控制器的规划轨迹, 由速度转换公式可得系统的期望横摆角度为:
式中:
车辆侧向换道控制策略采用二自由度的侧向自行车模型进行仿真实验, 结构参数如下:汽车质量M=1573 kg; 整车转动惯量为Iz=2873 kg· m2; 质心距前轴距离lf= 1.1 m; 质心距后轴距离lr=1.58 m; 汽车行驶速度vx=10 m/s; 前轮、后轮刚度系数Kf=Kr=80 000 N/rad。
(1)基于前馈补偿的LQR侧向控制
当系统给定的期望横摆角度为ψ des=t时, 分别采用LQR策略和带有前馈补偿的LQR策略进行控制器设计。LQR性能指标所采用的加权矩阵为
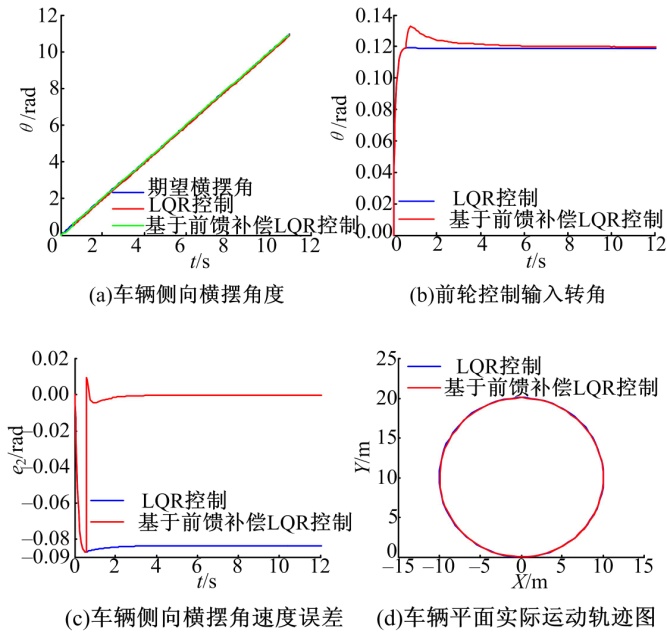 | 图8 LQR控制与基于前馈补偿LQR控制的侧向运动效果Fig.8 Lateral movement with the LQR control and LQR control based on feed-forward compensation effect |
从图8(c)可以看出, 经过调整后, LQR控制和基于前馈补偿LQR控制都能良好跟随期望横摆角度ψ des。根据两个控制效果的侧偏角误差曲线, 控制器在经过大约0.5 s调整时间后趋于稳定。由于横摆角速率
系统在全局坐标系下的运动速度可通过式(29)进行坐标变换求解。由于
(2)外界干扰变化对车辆控制效果影响分析
在车辆实际行驶过程中, 外界环境会干扰车辆状态。为了验证基于前馈补偿控制算法的抗扰性能, 车辆在模型参数改变情况下的控制效果如图9和图10所示。
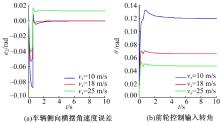
 | 图9 基于前馈补偿的LQR控制器在vx变化下的控制效果Fig.9 Control effect with the LQR controller of feed- forward compensation under the vx changes |
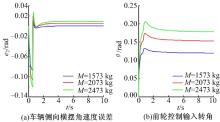
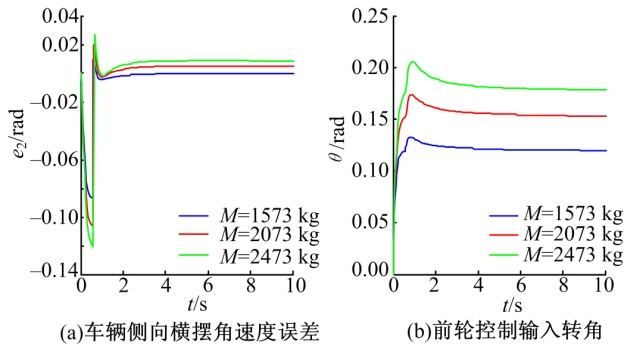 | 图10 基于前馈补偿的LQR控制器在M变化下的控制效果Fig.10 Control effect with the LQR controller of feed- forward compensation under the M changes |
当车速
提出了基于侧向换道安全距离模型的四轮独立驱动电动汽车的主动避撞的方法, 并对侧向换道避撞的可行性与安全性进行了研究。运用基于前馈补偿的线性二次型方法设计了侧向换道控制器, 并对控制器性能进行了分析和验证。基于输入补偿的前馈补偿策略能对系统的偏转角控制跟踪, 保证系统能够精确跟随给定期望横摆角, 通过实验验证了控制策略的有效性。本文研究对于后期电动车主动安全课题的深入研究具有重要意义。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|