


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
探测器软着陆小行星的自适应超螺旋控制
[张鹏1, 2  , 刘小松
, 刘小松1 , 董博3 , 刘克平3 , 李元春1, 3 ]
, 刘小松]
|
|


作者简介:张鹏(1989-),男,博士研究生.研究方向:航天器制导与控制.E-mail:zhangpenginjlu@163.com
针对探测器软着陆小行星的轨道控制问题,本文提出了一种基于自适应超螺旋算法的控制方法,避免了传统滑模控制的高频抖振,并且结构简单、无需已知外界扰动时间导数的上界。首先,将软着陆的轨道控制问题描述为一类非线性系统的镇定问题。其次,基于球谐系数法表示的小行星引力场模型设计前馈控制律,将系统解耦为三个滑模函数的一阶子系统。然后,针对每个子系统设计自适应超螺旋控制器,并证明闭环系统的稳定性。最后,将本文提出的控制方法与传统的自适应滑模控制进行了对比仿真,结果表明,所提出的算法能使系统更快地收敛到滑模面上,同时有效抑制抖振效应。
In order to alleviate the chartering problem of the traditional sliding model control, an adaptive supper-twisting controller was designed for the spacecraft soft landing on asteroids. The controller has a simple algorithm structure and does not need to know the upper bound of the external disturbance's derivative. First, the control problem of soft landing was formulated as the stabilization of a nonlinear system. Second, a feedback control based on the spheric harmonic expansion model of the asteroid gravity was applied to decouple the system. Then, three adaptive supper-twisting controllers were designed to stabilize the subsystems. Simulations of soft landing on the Eros433 were performed to verify the effectiveness of the proposed controller. The simulation results were compared with the traditional adaptive sliding mode control to show the advantages of the proposed controller.
探测器软着陆小行星是深空探测中的重要内容之一。小行星距离地球遥远, 在其附近探测器与地面控制中心的通信有很长时延。同时, 小行星的引力场具有强不规则性, 探测器在其周围的轨道运动机理十分复杂。因此, 传统的地面控制难以保证软着陆的安全性, 探测器的自主控制成为了研究的热点[1]。探测器软着陆小行星的轨道控制问题主要有如下特点:要求以“ 零速度-零误差” 着陆, 即系统稳态误差能收敛到零点; 要求控制算法结构简单, 计算量小; 要求控制算法的鲁棒性较强。由于满足上述要求, 滑模算法被广泛应用在软着陆自主轨道控制中[2, 3, 4, 5, 6, 7]。然而, 传统一阶滑模算法存在抖振问题[8, 9], 不仅难以工程实现, 而且可能威胁软着陆的安全性。Furfaro等[10]提出一种基于齐次高阶滑模算法的软着陆制导律, 但该制导律用轨道误差作为滑模函数, 算法的滑动阶数与滑模的相对阶数相同, 难以确保对抖振的有效抑制。
超螺旋(Super-twisting)算法[11]是一类结构简单的高阶滑模算法, 能有效抑制抖振问题, 且仅需要系统的一阶滑模信息。然而, 设计超螺旋算法的参数需要已知外界扰动时间导数的上界[12], 限制了其在实际系统中的应用。Shtessel等[13]提出了一种自适应超螺旋算法, 但需要外界扰动满足特定的假设条件。李鹏[14]提出了一种仅需要扰动时间导数有界的自适应超螺旋算法。Utkin等[15]基于一阶滤波器实现了对超螺旋算法参数的自适应估计。然而, 这些算法都是针对一阶SISO系统设计的, 而且自适应律也相对复杂。
针对探测器软着陆小行星的轨道控制问题, 本文设计了一类基于自适应超螺旋算法的控制器。该控制器在保持传统滑模控制精度高、鲁棒性强等优点的同时结构简单、限制条件少、能有效抑制控制抖振。首先, 建立了探测器的轨道动力学方程, 基于多项式制导法设计了标称轨道, 将软着陆轨道控制问题转化为一类非线性MIMO系统的镇定问题。然后, 基于球谐系数法表示的小行星引力势函数设计了前馈控制, 将原系统解耦为3个一阶子系统, 并设计了自适应超螺旋控制器来确保子系统的状态收敛到滑模面上。最后, 采用小行星Eros433的物理参数进行了数值仿真, 并将所设计的控制算法与传统滑模算法进行了对比。
探测器在小行星固连坐标系中的轨道运动可以描述为:
式中:
小行星的引力势函数通常难以精确获得, 因此将其表示为:
式中:
式中:
通过设计标称轨道, 可以将探测器软着陆小行星的轨道控制问题视为非线性系统(1)的状态轨迹追踪问题。
根据已知的探测器初始位置
定义误差向量为:
假设小行星绕其主自转轴稳定自旋, 则
式中:
定义滑模面为:
式中:
将式(7)与式(8)联立, 则得到滑模状态方程为:
若控制器
由于非线性系统式(9)为MIMO系统, 难以直接对其设计自适应超螺旋控制器。考虑到系统中耦合项的结构已知, 采用前馈控制对其解耦。
定义控制器为:
式中:
将式(11)、式(10)代入式(9), 得:
式中:
假设1
针对非线性系统(12), 设计自适应超螺旋控制器为:
式中:
定理 对于符合动力学模型(7)和假设1的探测器软着陆小行星的轨道控制问题, 采用如式(10)~(14)所示的自适应增益超螺旋控制。若控制器参数满足
证明 定义状态变换为:
将式(15)代入式(12)可以得到:
定义状态向量:
则:
定义:
令
定义李亚普诺夫函数为:
式中:
对李亚普诺夫函数求导, 得:
将式(19)代入
定义矩阵:
将式(20)(22)代入式(26)可得:
根据Shur补[17]的性质可知,
①
②
根据式(23)可知, 当
根据式(24),
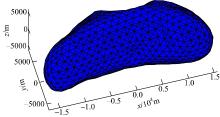
采用小行星Eros433作为软着陆目标进行数值仿真。以NASA公布的1708个面的形状数据为基础(如图1所示), 假设其密度为2.670 g/cm3, 用多面体法[18]建立Eros433的引力场模型作为其真实引力场
 | 图1 小行星Eros433的多面体模型Fig.1 Polyhedron model of the Eros433 |
由于着陆过程的时间较短, 过程中小行星与太阳的相对位置变化不大, 因此假设探测器在小行星周围受到的太阳光压和其他天体引力在小行星轨道坐标系下为常向量, 定义仿真中小行星固连坐标系下探测器受到的外界扰动为:
仿真中探测器软着陆标称轨道的初始位置为[26, 20, 22] km, 初始速度为[0.5, -0.9, 1.3] m/s, 着陆点位置为[0, 4, 2] km, 着陆时间为8000 s。控制器参数为
设计自适应滑模控制(ASMC)[19]如式(35)所示, 将其与本文设计的自适应超螺旋算法(AGSTC)分别仿真进行对比分析。为了更好地对比算法自身的性能, ASMC采用了与AGSTC同样的滑模函数。
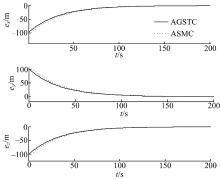
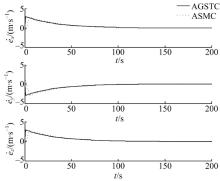
仿真中, 两种控制下探测器的动态性能如图2、图3和图4所示。从图2和图3可以看出, 两种控制下探测器轨道的位置误差和速度误差都能收敛到0, AGSTC的收敛速度略快于ASMC, 这是由于AGSTC算法能使系统状态更快地收敛到滑模面上, 如图4所示。上述仿真结果表明, 本文设计的控制器能有效地实现探测器对着陆轨道的追踪, 并且追踪误差的收敛速度快于传统滑模算法。
 | 图2 探测器轨道的三轴位置误差Fig.2 Tracking error of the spacecraft's position |
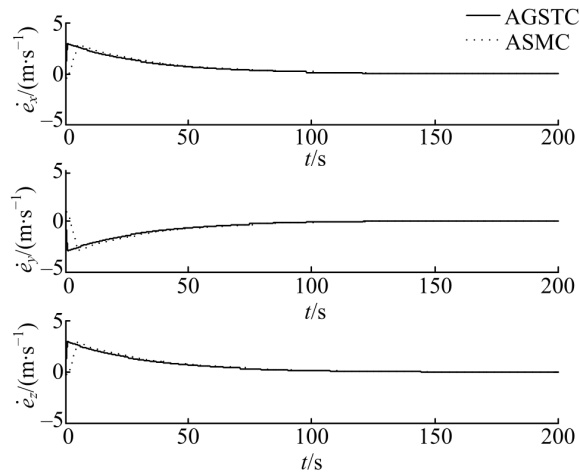 | 图3 探测器轨道的三轴速度误差Fig.3 Tracking error of the spacecraft's velocity |
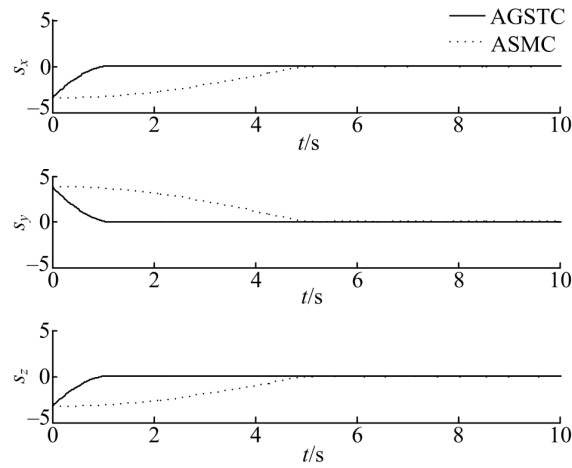 | 图4 探测器的滑模函数变化曲线Fig.4 Curve of the spacecraft's sliding mode function |
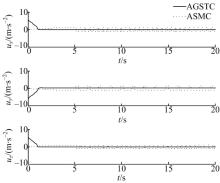
从图5可以看出, 由于ASMC控制器
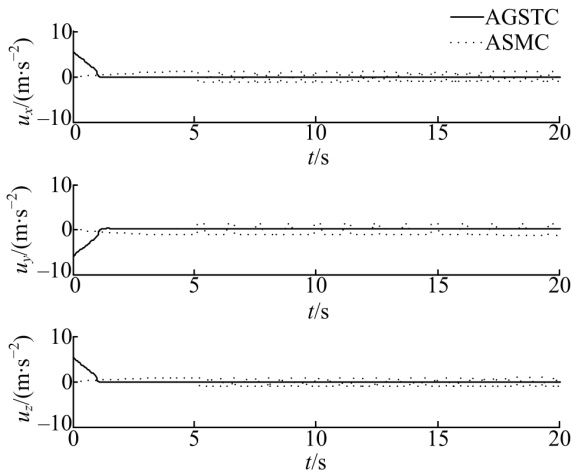 | 图5 三轴上的控制加速度曲线(AGSTC& ASMC)Fig.5 Control accelerations in the three axes (AGSTC& ASMC) |
图6为两种控制下探测器在固连坐标系
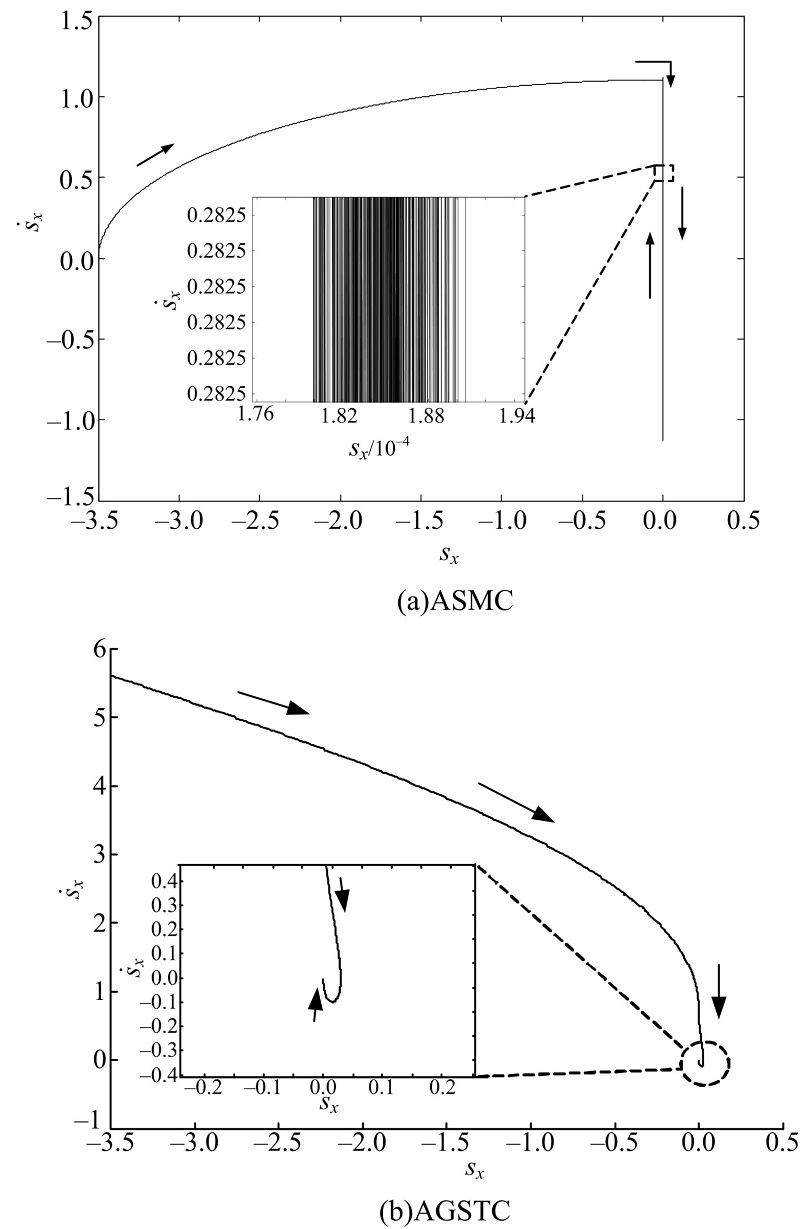 | 图6 x轴上的s- |
用边界层法改进式(35)中的ASMC算法, 将符号函数
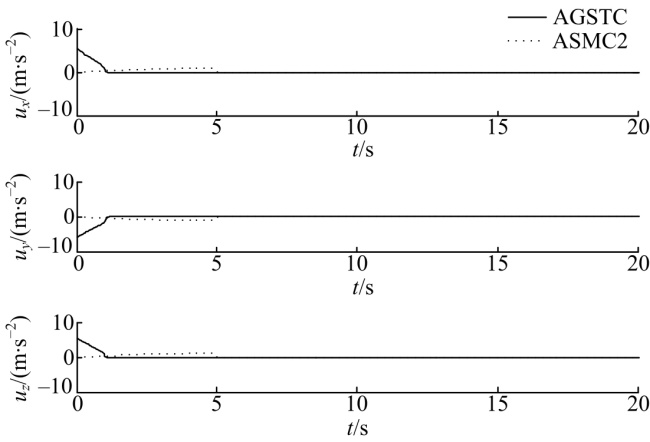 | 图7 三轴上的控制加速度曲线(AGSTC& ASMC2)Fig.7 Control acceleration in the three axes (AGSTC& ASMC2) |
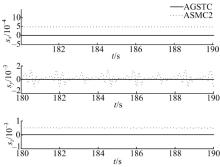
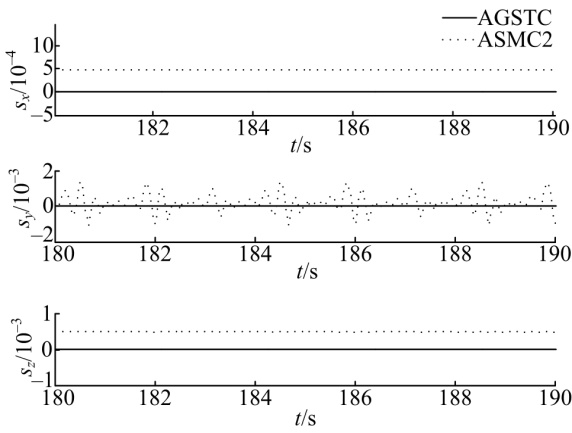 | 图8 探测器的稳态滑模函数变化Fig.8 Curve of the spacecraft's sliding mode function |
综上所述, 本文设计的自适应超螺旋算法能够使系统到达并保持在滑模流形
以探测器软着陆小行星的轨道控制任务为背景, 针对传统滑模控制中存在的控制抖振问题, 将自适应算法与超螺旋算法相结合设计了一类控制器。该控制器继承了传统滑模鲁棒性强的优点, 对引力场建模不确定性、太阳光压、其他天体引力等外界扰动不敏感。除此之外, 该控制器还有如下优势:①结构简单, 计算量小; ②系统滑动在滑模流形
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|