

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
驾驶人换道意图实时识别模型评价及测试
[郭应时1  , 付锐
, 付锐1, 2 , 赵凯1 , 马勇1 , 袁伟1 ]
, 付锐, 赵凯|
|


作者简介:郭应时(1964-),男,教授,博士生导师.研究方向:车辆安全技术.E-mail:guoys@chd.edu.cn
通过分析驾驶人换道行为和车辆运动状态,研究了意图换道和车道保持阶段的差异性,并基于BP神经网络模型和证据理论识别模型,对意图换道进行了实时识别试验。结果表明:两种模型在换道前3 s对意图换道样本识别准确率分别为78.26%、45.22%,在换道时刻的识别准确率分别为99.13%、86.96%;随机选择样本对两种识别模型进行验证,意图换道样本的识别准确率分别为86.00%、96.00%,车道保持样本的识别准确率分别为21.05%、78.95%,同时模型识别出正确样本的最长时间均小于0.5 s,表明证据理论识别模型具有较高的优越性和实用性。
The difference between lane change intention stage and lane keeping stage was studied by analyzing the driver lane change performance and the vehicle movement parameters. Based on BP neural networks model and D-S evidence theory model, the real-time identification of lane change intension tests were carried out. The results show that that sample identification accuracies of the two models in three seconds before the lane change are 78.3% and 45.2% respectively. The identification accuracies just at the moment of lane change are 99.13% and 86.96% respectively. By verifying the two models with random sample data, the identification accuracies for lane change intension are 86% and 96%, while for lane keeping are 21.05% and 78.95% respectively. The maximum time of the models for accurate identification is less than 0.5 second. It indicates that the evidence theory identification model is more applicable and reliable in both accuracy and timeliness.
目前, 换道辅助和车道保持系统大多是通过雷达或者视觉传感器获取的周围环境信息和自身车辆状态来评价当前的交通安全状况, 但许多系统都忽略了驾驶人的操作策略和行车意图[1, 2]。驾驶人作为车辆的操作者, 是影响行车安全的重要因素, 行车过程中驾驶人会受到周围交通环境、车内信息和自身状况的影响。如果辅助安全系统不能准确理解驾驶人的行车意图, 往往会发出错误警报或者强制执行动作, 从而导致驾驶人分心[3]、精神负荷增大甚至影响驾驶人对车辆的安全操控。因此, 对驾驶人换道意图进行识别具有十分重要的现实意义。
国内外交通安全研究对驾驶人这一影响因素高度关注[4], 尤其在驾驶人视觉特性及注视行为领域的研究已开展得相当广泛[5, 6]。Liu等[7]与日产加利福尼亚研究中心合作将隐形马尔科夫模型(HMM)作为意图识别模型, 通过驾驶模拟器采集的方向盘转角、转角速度、横向距离来预测驾驶人的换道行为。Tezuka等[8]提出了基于贝叶斯网络的驾驶人意图识别模型, 利用驾驶模拟器采集车辆转向角数据, 对驾驶人的换道意图进行识别。Dogan等[9]探讨了机器学习技术对驾驶人意图识别工作的影响, 将车道线位置、横向加速度、方向盘转角、碰撞时间(Time to collision, TTC)、道路曲率等变量进行组合, 通过人工神经网络模型和支持向量机预测驾驶人行为。Doshi等[10, 11]以实车驾驶试验采集驾驶人行为、车辆状态及周围环境数据, 进行驾驶人换道意图的研究, 应用相关向量机(RVM)对不同变量组合的预测结果进行分析, 使用换道前2、3 s左右的连续数据推测驾驶人换道意图。
国内对车辆换道行为的研究较多, 而针对驾驶人意图识别的研究起步较晚。彭金栓[12]和袁伟等[13]对意图换道和车道保持阶段的驾驶人注视行为、操作行为、车辆运动及周围环境状态进行了深入分析, 并基于证据理论来识别视觉特性的换道意图, 基于Logistic模型识别车辆运动模块的换道意图, 以预测驾驶人的换道行为。马勇等[14]综合驾驶人头部运动、车辆运动状态及相对位置等参数, 利用BP神经网络对驾驶人的换道行为进行预测。王玉海等[15]分析了驾驶人在不同道路环境中停车、减速、维持车速、加速和急加速的期望加速特性, 利用模糊控制理论建立了以油门踏板开度及其变化为准则的换道意图识别模型。
分析以上研究可以发现:Tezuka[8]、Dogan[9]等对换道意图的探索多集中于车辆运动; Doshi等[10, 11]对驾驶人的意图研究相对深入, 参数涵盖了驾驶人行为、车辆运动、周围车辆, 但只对换道前5 s内每0.5 s时刻附近较小区间内的连续数据进行意图识别。同样马勇等[14]以换道前0.5、1.0、1.5、2.0 s四个时刻点的样本数据作为BP神经网络输入, 得到意图识别准确率均在90%以上, 但该研究仅对瞬时状态进行识别, 未实现对样本的连续识别。彭金栓[12]对驾驶人换道意图识别的研究则较为全面, 基于证据理论以连续时间内视觉搜索特性进行意图样本识别, 基于逻辑回归模型以瞬时车辆运动状态进行意图识别, 但识别准确率较低。将这两种模型集成后, 识别准确率虽高, 但识别参数为视点转移概率、平均注视时间、不同区域注意力分配比例, 因而参数计算较复杂, 且视点区域识别也是一个研究难题, 因此实时识别过程的自主计算工作量较大。
本文基于长安大学驾驶行为信息采集平台, 通过采集实车驾驶过程中的意图换道和车道保持阶段的连续时间数据, 以5 s内的连续时间数据分析意图换道及车道保持过程中驾驶人及车辆运动行为的变化差异。提取了当前车辆应用领域易于采集识别的特征指标, 确定了驾驶人意图换道和车道保持的表征参数, 并选择简单识别模型, 模拟实时意图识别过程。最后, 对比并测试了基于BP神经网络和证据理论的识别模型。
考虑驾驶人的行为特性和本文研究的需要, 本文将换道过程分为意图换道阶段和换道执行阶段。意图换道阶段为驾驶人操纵车辆换道前, 观察周围车辆情况、判断换道可行性等一系列决策过程; 换道执行阶段为驾驶人开始操作车辆换道至车辆在目标车道稳定行驶这一过程, 意图换道阶段和换道执行阶段的划分参考吴海波[16]对换道起始时刻的选择, 以换道起始时刻作为意图换道阶段和换道执行阶段的分界点, 根据吴海波[16]的试验方法采集了8位驾驶人实车换道数据, 选取138组意图向左换道和114组车道保持数据进行分析。
1.1.1 视觉行为
由于视角受限, 驾驶人行车过程中会辅以头部运动得到较好的视野, 从而以更好的角度观察、快速获取全面的交通信息。
图1(a)(b)分别为换道阶段与车道保持阶段驾驶人头部和眼睛水平转动角度的变化趋势。由图1(a)(b)可知, 驾驶人头部和眼睛水平转动有较高的一致性; 眼动变化略滞后于头部运动, 视点的响应速度比头部运动迅速, 且波动峰值大于头部运动。
'>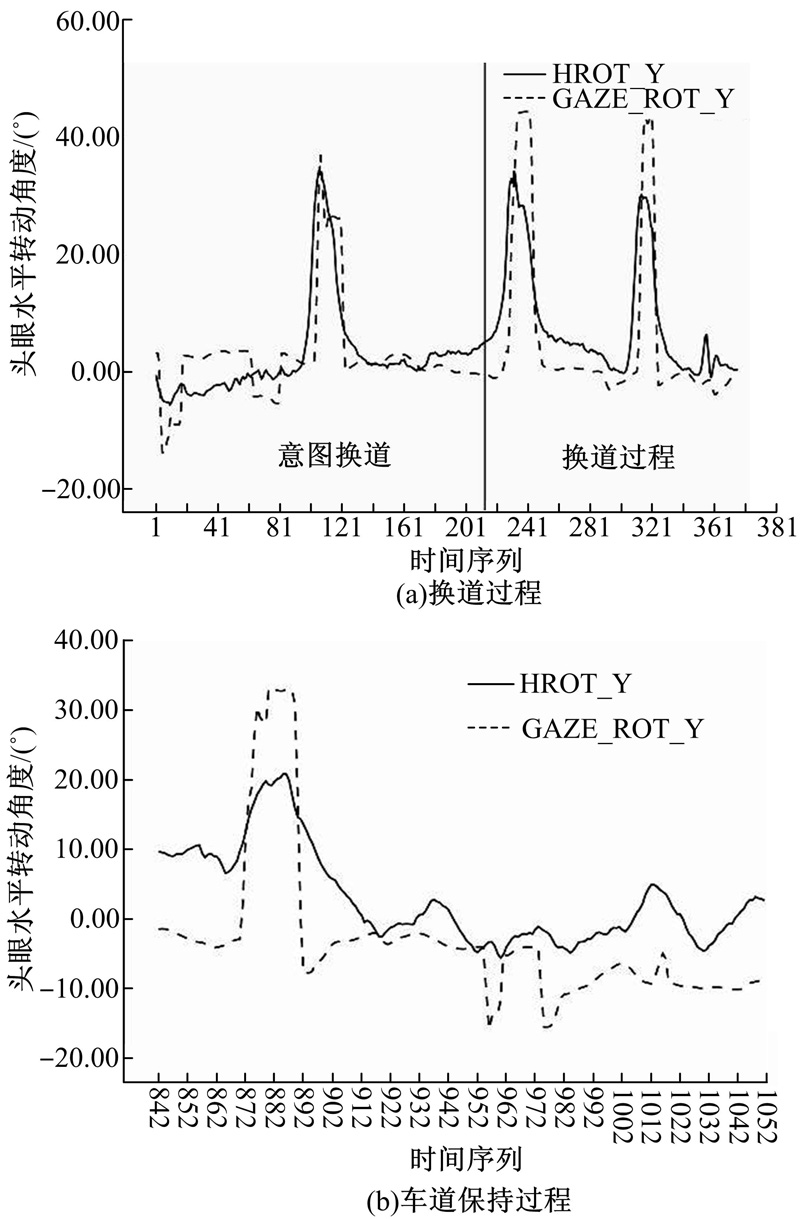 | 图1 水平转动角度变化趋势Fig.1 Horizontal rotation angle's change trend |
进行Pearson相关性分析, 得到在0.01水平上显著性Sig=0, 说明头部和眼睛运动显著相关。行为学研究表明[12], 驾驶人的视线变化包含部分头部运动, 但眼动的细微变化不如头部运动易于捕捉, 同时许多潜在因素(如疲劳、分心等)都会使眼动数据受到影响。因此综合考虑后, 选择头部水平转动角度HROT_Y作为意图识别的视觉运动指标。
图2(a)(b)(c)分别为意图换道、换道和车道保持阶段头部水平转动角度的分布直方图, 置信度均为90%。由图2可知:意图换道和换道阶段的90%置信区间分布分别为[-12.84° , 18.25° ]和[-13.16° , 19.67° ]; 车道保持阶段90%置信区间仅为[-6.29° , 7.32° ], 可见意图换道阶段及换道阶段的HROT_Y分布更为分散, 车道保持阶段相对集中。表明驾驶人意图换道时会增加对左、右两侧的关注程度; 而车道保持阶段头部转动角度相对较小, 并且视点集中在本车道内。
'>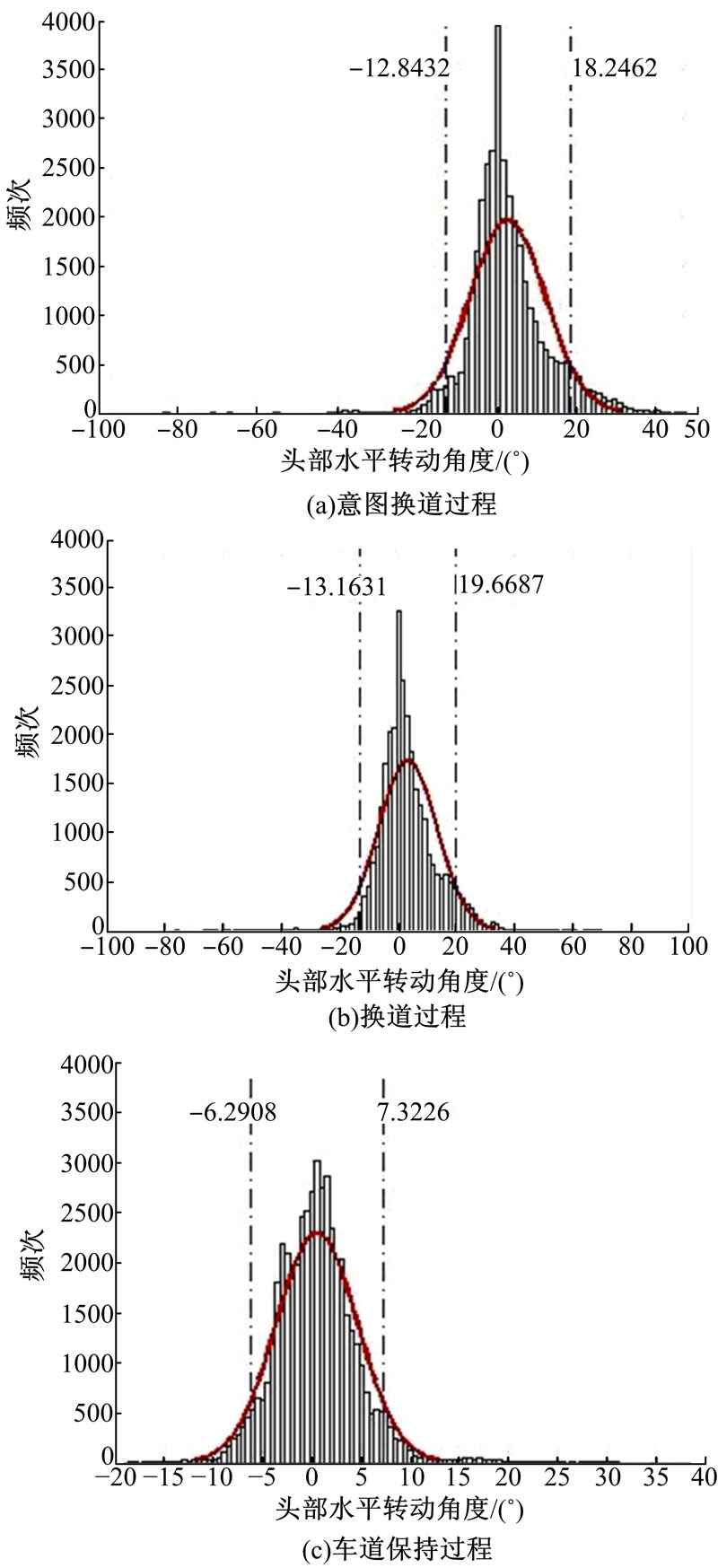 | 图2 HROT_Y分布图Fig.2 HROT_Y's distribution |
1.1.2 转向操作
驾驶人换道意图产生之后, 将采取换道操作, 包括对转向灯的操作和对方向盘的操作。由于实际测试数据中方向盘转角信号精度较低, 本文仅以转向灯开启作为换道意图识别的有效指标。
本文将转向灯开启操作确定为换道意图识别体系的指标, 意图换道特征值TS=1, 车道保持特征值TS=0。
1.2.1 车速V
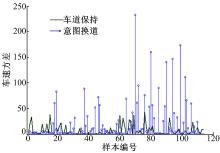
换道过程中, 驾驶人不但需要转动方向盘以改变车辆的横向位置, 也会有加减速操作, 使车辆能够顺利完成换道。图3为样本车速方差分布情况。由图3可知, 意图换道阶段车辆速度方差值更大, 表明意图换道阶段的速度变化相对较大, 反映出驾驶人通过不断调整速度以获得有利的换道时机。因此一定时间段内车速V的变化幅度可以作为换道意图识别的特征参数, 本文取意图换道车速标准差特征值为6 km/h, 小于6 km/h时为车道保持阶段, 大于6 km/h时则需要结合其他参数对换道意图进行判定。
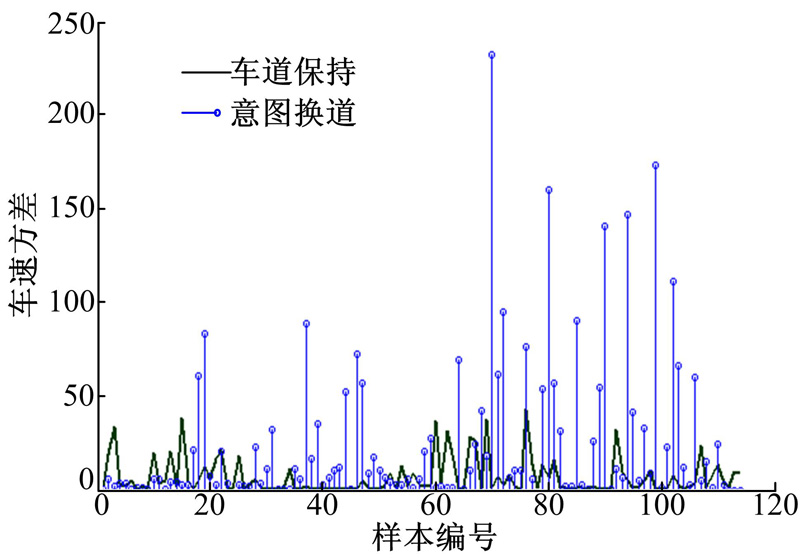 | 图3 不同阶段车速方差统计结果Fig.3 Speed variance statistics of different stages |
1.2.2 车辆横向位置
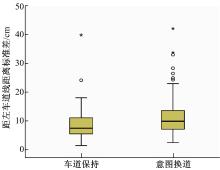
车辆横向位置即车辆相对于车道线的位置, 包括车辆距离左、右车道线距离、偏离车道中心线的距离。行车过程中车辆距离左、右车道线距离的变化趋势是一致的, 本文选择距左侧车道线距离进行分析。不同阶段车辆距左侧车道线距离的分布如图4所示。
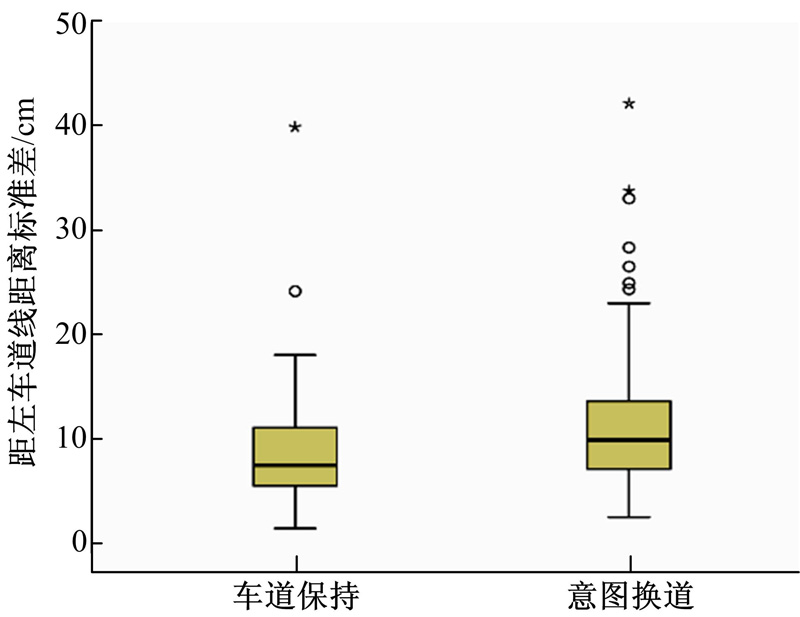 | 图4 不同阶段车辆与左侧车道线距离对比Fig.4 Comparison of distance between vehicle and left side of lane line of different stages |
由图4可知, 相比车道保持阶段, 驾驶人意图换道时对车辆横向位置的控制能力较差。一方面是因为驾驶人意图换道阶段观察任务加重, 使得控制车辆能力降低; 另一方面是因为驾驶人意图换道阶段会开始尝试换道操作, 有意调整车辆的横向位置。但两阶段车辆与左侧车道线距离差异并不大, 因此本文换道意图识别不以车辆距车道线距离为有效指标。
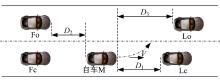
驾驶人对换道可行性的决策主要是对换道空间和时间的估计, 即判断当前车道前方车辆(Lc)、目标车道后方车辆(Fo)及目标车道前方车辆(Lo)是否能干扰自身车辆(M)安全换道。而当前车道后方车辆(Fc)对驾驶人整个换道行为影响较小, 本文不予考虑。
周围车辆对自身车辆的影响参数主要为相对距离D和碰撞时间(TTC)[17]; 设当前车道前方车辆与自身车辆相对距离和碰撞时间分别为D1、TTC1, 目标车道后方车辆与自身车辆相对距离和碰撞时间分别为D2、TTC2(见图5)。
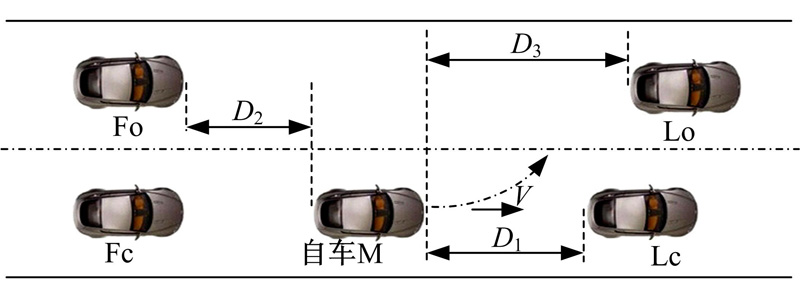 | 图5 周围相关车辆示意图Fig.5 Schematic of associated vehicle around |
已有研究表明[12]意图换道与车道保持阶段D1差异显著, 可作为换道意图识别的有效指标。自身车辆与前方车辆的纵向距离是驾驶人换道可行性检测的重要因素, 同时安全时距也是驾驶人考虑的重要因素。当两车距离较远但驾驶人认为自身车速大于后车(Fc)车速, 且不符合行驶习惯时会考虑换道。
由于D1受交通流、道路条件、天气影响较大, 因此以周期内车速变化标准差作为特征参数, 意图换道阶段D1的标准差特征值为10 m, 并结合其他周围车辆参数对驾驶人换道意图进行判定。意图换道和车道保持阶段的TTC1有明显差异, 若前方存在慢车, 则意图换道阶段TTC1的特征值为16 s。
目标车道后方车辆主要对驾驶人换道可行性检测有一定影响, 目标车道其他车辆对驾驶人换道意图影响较小。当目标车道后方车辆Fo距离自身车辆较近时, 考虑其对换道意图的影响。设意图换道阶段D2特征值为50 m; TTC2特征值不做设定, 从样本中随机取值作为换道意图识别的参考特征。
本文利用BP神经网络对驾驶人换道意图和车道保持进行特征分类, 从而识别驾驶人的换道意图, 包括对BP神经网络的构建、训练及识别分类3个部分。
2.1.1 BP神经网络的构建
本文采用含有一个隐含层的BP神经网络; (V、TS、D1、TTC1、D2、TTC2、HROT_Y)为换道意图识别体系的指标, 因此输入层节点数为7; 输出为换道意图和车道保持两种状态, 用二进制表示, z=1表示有换道意图、z=0为车道保持; 综合本文实际模式识别/分类的问题, 考虑网络的性能和运算速度, 参照式(1)确定隐含层节点数, 节点数为15; 输入向量的元素在[0, 1]中取值, 选择输入层和隐含层的传递函数为S型正切函数tansig; 由于输入为0或1, 选择隐含层与输出层的传递函数为S型对数函数logsig; 采用梯度下降动量学习函数learngdm进行权值/阈值的学习, Levenberg-Marquadt算法训练函数。
式中:n为隐含层节点数目; n0为输入层节点数。
2.1.2 BP神经网络的训练
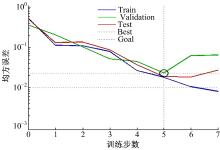
BP神经网络构建完成之后, 需要训练调整各层之间的连接权值和阈值, 使神经网络具有记忆分类和识别能力。根据本文设定的换道意图识别参数的特征值, 得到学习样本, 从而对构建的模型进行训练, 性能曲线如图6所示, 识别模型经过5步训练便达到稳定, 并且均方误差为0.086, 小于0.1, 符合预期训练要求; 验证和测试的均方误差均在0.1以下, 且回归系数分别为0.99、0.83, 表明模型已达到良好的训练目的, 能够用于意图识别。
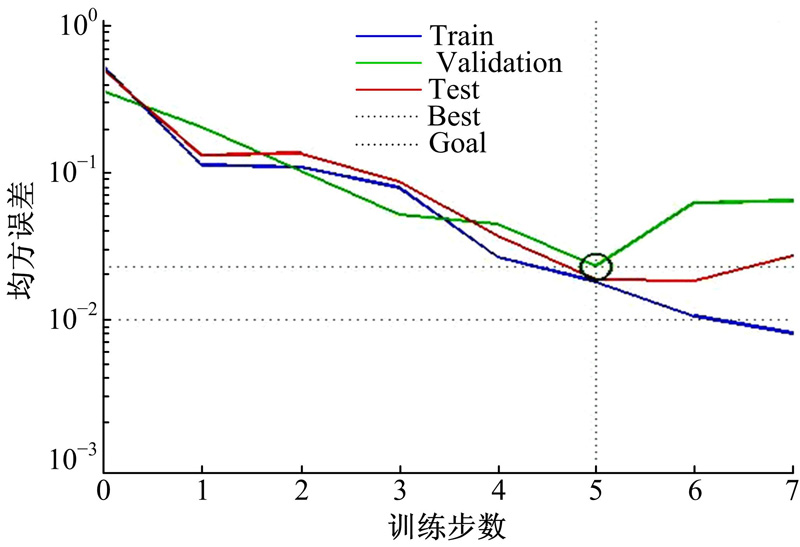 | 图6 BP神经网络识别模型性能曲线Fig.6 BP neural network recognition model performance curve |
2.1.3 BP神经网络验证
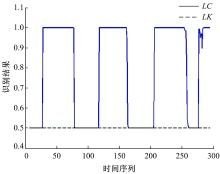
为了保证后续使用BP神经网络实时识别驾驶人换道意图试验的准确性, 在驾驶人实车驾驶过程中随机选取意图换道数据和车道保持5 s内的数据作为测试样本, 进一步对模型进行测试, 测试结果如图7所示。图7中LC为意图换道样本; LK为车道保持样本。由图7可见, 模型能够区分意图换道和车道保持, 表明此BP神经网络识别模型可用于实时识别试验。
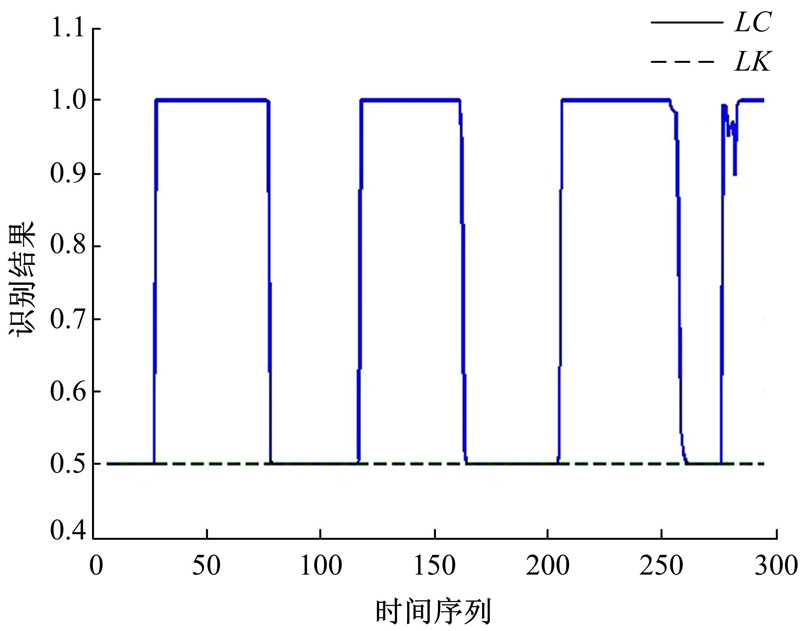 | 图7 BP识别模型对意图换道样本识别结果Fig.7 Results of BP recognition model recognizes lane change intention samples |
2.2.1 证据理论模型构建
本文目的是区分驾驶人的换道意图和车道保持, 因此, 识别框架为Θ ={θ 1, θ 2}={车道保持, 意图换道}。驾驶人换道意图识别体系则为需要融合的证据e={V、TS、D1、TTC1、D2、TTC2、HROT_Y}。由前文换道意图和车道保持两阶段各参数的差异性分析结果可获得两种目标模式下各证据构成的典型样本矩阵, 如表1所示。矩阵中每个元素表示某种行为模式下(所在列)对应证据指标(元素所在行)的典型特征值。
| 表1 典型样本矩阵 Table 1 Typical sample matrix |
对于一待识别样本, 其证据值为{e1, e2, …, ei, …, em}, 设其与对应目标θ j的典型证据值为eij, 并且对于换道意图识别问题, 仅存在两种待识别模式(即n=2), 则证据ei对目标θ j的基本概率值可表示为:
式中:Lij=
由式(2)可计算出样本中各证据与意图换道、车道保持的基本概率值, 构成对应的基本概率矩阵。
2.2.2 证据融合及决策
识别过程中, 各证据在换道意图和车道保持阶段的差异性较为显著, 导致|ei1-ei2|较大, mi(θ j)接近1或者0时, 会影响目标识别的准确性。因此, 计算各证据的初始信任概率时, 需要进行设定:①mi(θ j)> 0.8时, 令mi(θ j)=0.8; mi(θ j)< 0.2时, 令mi(θ j)=0.2; ②0.2≤ mi(θ j)≤ 0.8时, mi(θ j)保持不变。多证据的证据合成规则为m(θ j)=m1(θ j)⊕m2(θ j)⊕…⊕m7(θ j), 计算出两种目标最终的基本信任概率m(θ 1)和m(θ 2)。
然后, 基于基本信任概率值的决策规则, 对目标进行模式识别。根据本文实际问题, 取ε =0.2。当|m(θ 1)-m(θ 2)|> 0.2时, 认为此样本的识别结果为基本信任概率较大值对应的行为模式, 即若m(θ 1)> m(θ 2), 则此样本为意图换道; 若m(θ 1)< m(θ 2), 则此识别样本为车道保持; 若无法满足|m(θ 1)-m(θ 2)|> 0.2, 则取样本对应的基本信任概率值最大的模式为最终识别结果。
本文根据驾驶人行为特性及车辆运动状态判断驾驶人是否有换道意图, 即区分待识别数据中的意图样本和车道保持样本。主要评价指标包括识别信度和时序性。
(1)识别信度
系统性能分析时通常采用的评价指标为灵敏度、准确率和误警率。灵敏度即为真阳性率, 即所有意图样本中识别为意图换道的比例; 误警率是指车道保持样本中识别为意图换道的样本比例; 准确率为所有样本中识别结果与期望结果一致的样本比例。
(2)时序性
为了保证换道意图识别系统应用的有效性和可靠性, 同时需要考虑识别的时序性, 即系统识别出的换道意图时刻提前于驾驶人换道操作起始时刻才有实际应用价值; 识别结果为真阳性情况下, 识别出换道意图的时刻越早, 识别算法的可应用价值越高。
此外, 对识别系统的时序性评价需要考虑系统的运算时间。实际应用中识别所需的时间越短, 换道预警系统、车道保持系统、换道辅助系统能够越早根据驾驶人行驶意图选择相应的辅助操作, 甚至对驾驶人的不当操作发出警告, 制止危险操作, 从而保障行车安全。
3.2.1 BP神经网络
基于BP神经网络识别模型对样本进行实时试验, 结果见表2。BP神经网络识别的真阳性率达到了114/115=99.1%, 即对意图换道样本的识别准确度达到99.1%; 整体样本的识别准确率为(114+70)/229=80.35%; 误警率为19.65%, 表明模型实际应用的准确度达到80.35%。
| 表2 BP神经网络换道意图识别信度 Table 2 Recognition reliability of BP neural network of lane change intention |
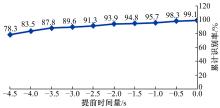
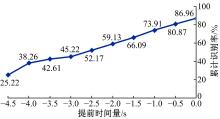
图8为BP神经网络模型对意图换道样本的时序性分析结果。由图8可知, BP神经网络模型根据换道前4.5 s的数据即可准确识别出78.3%的意图换道样本, 换道起始前的数据识别准确率可达到99.13%。
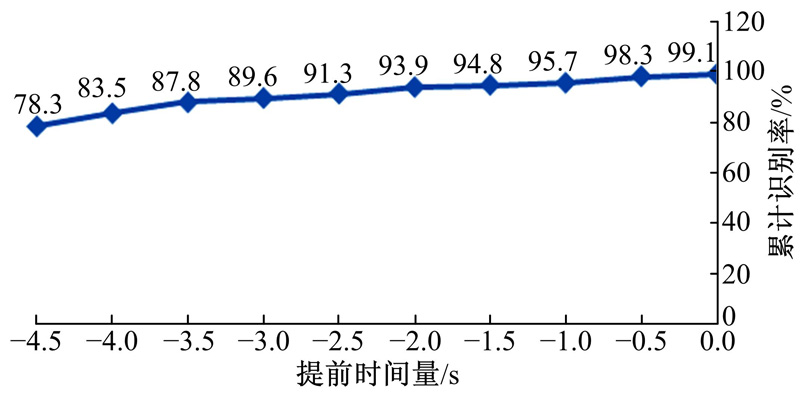 | 图8 BP神经网络识别时序性分析Fig.8 Timing analysis of BP neural network recognition |
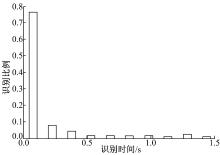
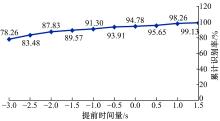
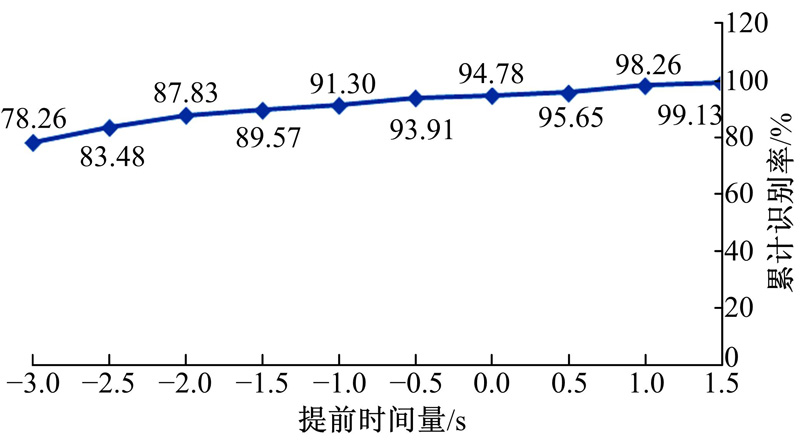
模型识别的运算时间对模型时序性有较为显著的影响, 直接决定换道意图识别系统应用的有效性。为了全面评价换道意图识别系统应用的有效性, 需要综合考虑BP神经网络的识别数据时刻及运算时间。图9为BP神经网络运算时间分布, 最长运算时间为1.5 s, 以此修正系统对意图换道样本识别的正确率分布, 结果如图10所示。由图10可知, 换道起始时刻前3 s准确识别出换道意图的百分比为78.26%, 表明换道意图识别系统不但具有良好的识别信度, 同时具备良好的可靠性, 能够为其他驾驶辅助系统提供良好的信息支持。
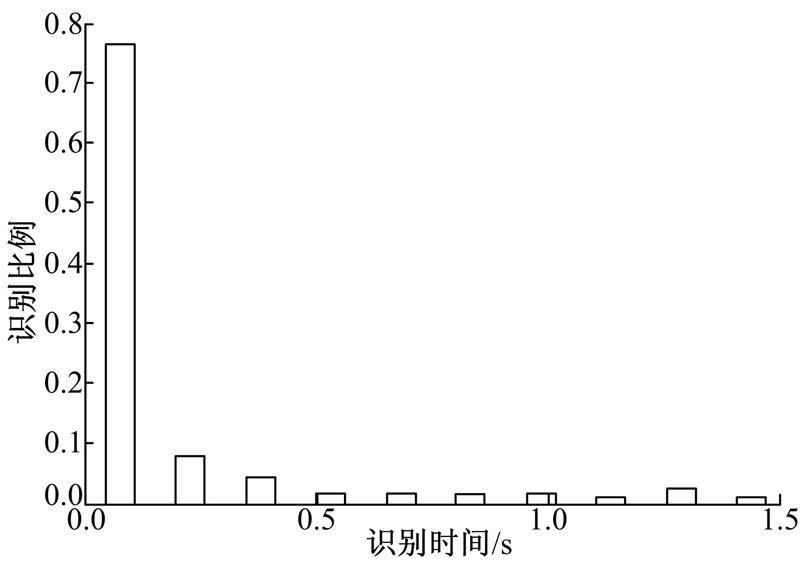 | 图9 BP神经网络意图识别时间分布Fig.9 Time distribution of BP neural network for intention recognition |
3.2.2 证据理论
基于证据理论建立换道意图识别算法, 对试验样本进行实时识别试验, 结果如表3所示。换道意图识别的真阳性率为100/115=87.0%; 整体样本的识别准确率为(100+103)/229=88.65%; 误警率为11.35%。
| 表3 证据理论换道意图识别信度 Table 3 Recognition reliability of evidence theory for lane change intention |
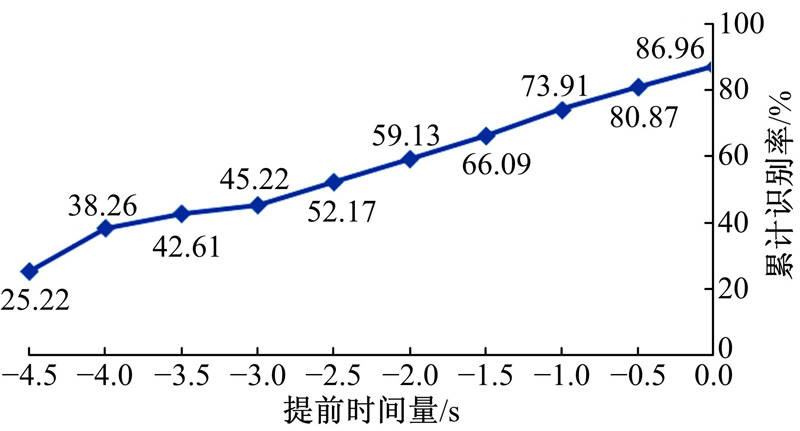
图11为证据理论对意图换道样本识别时序分析结果。换道前3 s意图换道样本检测到的意图换道比例为45.22%; 换道前2 s的准确识别率为59.13%; 换道前1.5 s的识别准确率为66.09%; 换道起始时刻的识别准确率为86.96%。
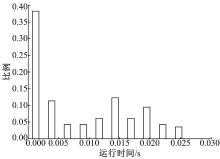
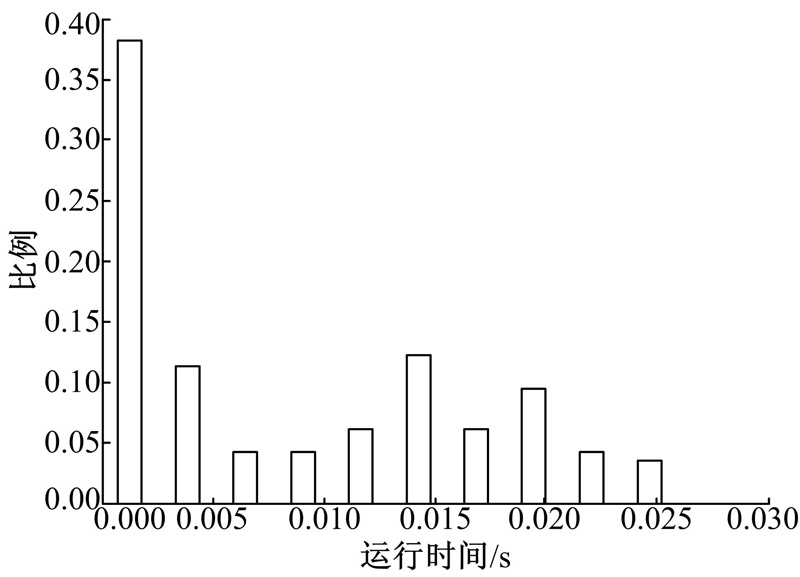
图12为识别意图换道样本所用时间的分布图。由图12可知, 系统识别出意图换道样本所用的运行时间皆小于0.03 s, 因此证据理论识别模型能够及时识别出驾驶人的换道意图, 不需要对证据理论识别准确率进行时序调整。
3.2.3 试验验证
为进一步验证意图识别模型的适用程度, 重新选择驾驶人50次意图换道、57次车道保持的样本数据, 根据BP神经络识别模型及标准D-S证据理论识别模型, 对样本连续5 s内的实车行驶数据进行驾驶人换道意图实时识别试验, 结果如表4所示。
| 表4 BP神经网络和证据理论换道意图识别信度对比 Table 4 Reliability comparison of BP neural network and evidence theory for lane change intention recognition |
由表4可知:BP神经网络和证据理论识别模型对换道意图样本的识别准确率分别为86.00%、96.00%, 对车道保持样本的识别准确率分别为21.05%、78.95%。两意图模型识别出正确样本的最长时间分别为0.495、0.424 s, 两种模型的识别运算时间相当, 在识别时序性方面二者相当, 然而BP神经网络识别模型无论对意图样本还是车道保持样本的识别准确率均大大低于证据理论识别模型, 且对车道保持样本的识别准确率仅为21.05%。其原因可能是前文选取的用于分析意图换道和车道保持的样本大都为典型样本, 用以验证的数据则包含一部分非典型样本, BP神经网络的识别率过低, 表明其对学习样本及特征参数依赖性较强。特征参数中车速、TTC及相对距离为学习样本的标准差, 而不同次换道中车速、TTC及相对距离等因素的变化也很大, BP神经网络的学习依赖性体现得更明显, 因而不能分辨出周围环境简单的换道情况。
(1)基于课题组自行开发的驾驶行为信息采集平台采集了实车驾驶过程中的意图换道和车道保持数据, 分析了驾驶人换道意图的影响因素和表征参数, 对比分析了基于BP神经网络和证据理论的识别模型, 并对识别模型进行了测试。
(2)选用头部水平转动角度这一单一视觉行为指标, 以及转向灯操控行为、车辆运动状态及与周围目标的相对关系参数作为换道意图识别指标, 并基于BP神经网络、证据理论对获取到的连续数据进行在线识别模拟, 对比两种模型在实际应用中的可靠性。BP神经网络换道意图识别模型虽对特征提取样本有较好的识别信度, 但对其他样本的识别信度较差, 表明该模型对学习样本的典型性有较强的依赖; 而证据理论模型无论对特征提取样本还是其他随机样本都有较高的识别信度, 意图换道、车道保持的识别准确率均超过了78%, 同时识别过程的运算时间较短, 因此证据理论换道意图识别模型能够在实时识别过程中兼顾识别信度和实时性, 具有较强的适用性和一定的稳定性。
(3)本文证据理论识别模型所需采集的参数容易获取, 识别准确率较高, 模型识别出正确样本的最长时间小于0.5 s。可见本文研究结果对于提前获知驾驶人换道意图、准确识别换道风险和实现辅助换道具有现实意义。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|