



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
混合动力汽车启停非线性控制器设计
[胡云峰1, 2, 3  , 顾万里
, 顾万里2 , 梁瑜2 , 杜乐2 , 于树友1, 2 , 陈虹1, 2 ]
, 顾万里, 陈虹|
|


作者简介:胡云峰(1983-),男,讲师,在站博士后.研究方向:发动机控制.E-mail:huyf@jlu.edu.cn
在对混合动力汽车启停运行机理分析的基础上,建立了能够反映启停过程的发动机瞬态动力学特性的AMESim仿真模型;然后,根据发动机启停系统工作原理,将混合动力汽车的启停控制问题转换成转速跟踪控制问题,并推导了简化的面向控制的电机与发动机系统耦合模型;针对系统的非线性特性,设计了非线性三步法启停控制器,并通过输入到状态稳定理论证明了闭环系统的鲁棒稳定性。最后,通过AMEsim和MATLAB/Simulink联合仿真验证了非线性三步法启停控制器的有效性和鲁棒性,实现了混合动力汽车的快速、平稳启停。
First,the start-stop operation mechanism of hybrid vehicle is analyzed, and an AMESim simulation model is established, which can reflect the transient dynamics of the start-stop process. Second, according to the working principle of the engine start-stop system, the start-stop control problem is described as a speed tracking problem, and a simplified control-oriented model of the engine and motor coupling is proposed. Third, based on the nonlinear characteristics of the system, a nonlinear triple-step controller is designed, and the robust stability of the closed-loop system is analyzed using the input to state stability theory. Finally, the effectiveness and robustness of the triple-step controller is tested by co-simulation with AMESim and MATLAB/Simulink. Results show that the proposed control system can achieve fast and smooth start-stop of the engine.
针对启停过程中发动机和电机的切换策略制定问题, 文献[1]提出了利用减速断油模式下重新标定实现发动机高速启动的方案, 这种查表的控制方式并没有考虑车载电器扰动对于发动机期望转速的影响。文献[2]综合考虑了驾驶员安全性、驾驶习惯和油耗排放等标定启停参数, 制定参数阈值。文献[3]利用遗传优化算法配置实际驾驶循环中的操作策略, 确定发动机启停。文献[4]采用模型预测控制, 根据能量管理需求预测发动机启停。以上方法可为启动控制确定发动机切换时刻提供参考。针对启停特性的研究, 文献[5]采用基于循环控制的方法对发动机快速启动时喷油控制策略进行优化, 在混合动力框架下发动机启动时可由电机拖动, 找到合适的电机拖动策略即可取消初始几个循环的喷油量。文献[6]分别对发动机启动与关闭过程中不同控制变量对车辆性能影响进行了分析, 采用以功率为主要参数的控制策略。文献[7]针对进气道汽油机启停问题, 根据发动机启动时刻各缸活塞位置制定燃油喷射策略, 这种控制策略必须保证活塞位置可以准确估计。文献[8]设计了柴油机冷起动过程程序流程图, 并根据影响启动的因素提出了多种模式的控制策略。文献[9]研究了启动电压对启动性能的影响。针对启停过程中的启停电机控制问题, 文献[10]针对混合动力汽车发动机启停控制问题设计了前馈控制加闭环(Linear quadratic regulator, LQR)控制的启停控制器, 该方法可使发动机快速启动, 但系统瞬态效果并不理想, 启动过程发动机转速波动较大。
本文针对启停过程中的建模与启停电机控制问题展开研究。首先对控制问题进行了描述并给出了启停过程中工作机理和仿真模型的搭建过程, 然后给出非线性三步法控制器设计过程并证明闭环控制系统的稳定性和鲁棒性, 最后通过仿真证明了控制算法的有效性。
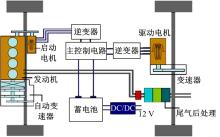
本文的研究对象如图1所示, 其中发动机与电机是通过皮带进行连接的。当发动机有启动需求时, 启停电机开始工作, 通过皮带将发动机拖动至理想的转速后开始正常工作, 启停系统工作过程中通过控制启停电机输出力矩使发动机启动, 此时控制系统输入是电机力矩, 输出为发动机转速, 因此本文可将启停控制问题转化为通过控制启停电机输出力矩实现跟踪期望启动转速的问题。
 | 图1 混联式混合动力汽车结构图Fig.1 Schematic diagram of series/parallel HEV |
首先在机电一体化仿真软件AMESim中搭建了能够反应发动机瞬态动力学特性的仿真模型; 其次, 针对发动机启停系统存在的非线性特性, 提出了非线性启停控制器“ 三步” 设计方法, 该控制器由类稳态控制、前馈控制以及状态依赖的误差反馈控制组成, 然后, 在输入到状态稳定性(Input to state stability, ISS)理论框架下对闭环系统的鲁棒性进行分析, 从理论上证明该系统具有抗干扰性能。最后, 通过仿真验证了控制算法的有效性。
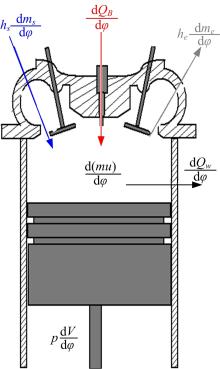
发动机气缸内的工作过程十分复杂, 它包括了气体的流动、传质、传热以及燃料燃烧过程带来的物理和化学等变化[11, 12], 四冲程发动机工作机理如图2所示。为了建立描述气缸内气体状态变化模型, 需要把气缸看成是由气缸套诸壁面、气缸盖以及活塞顶面构成的一个热力学系统。其中工质的状态可以由工质压力、质量以及温度确定, 并通过质量守恒方程、能量守恒方程以及理想气体状态方程综合联系整个工作过程。
1.2.1 建模的基本假设
在进行柴油发动机气缸热力学计算时, 为简化研究过程, 做如下假设[13]:
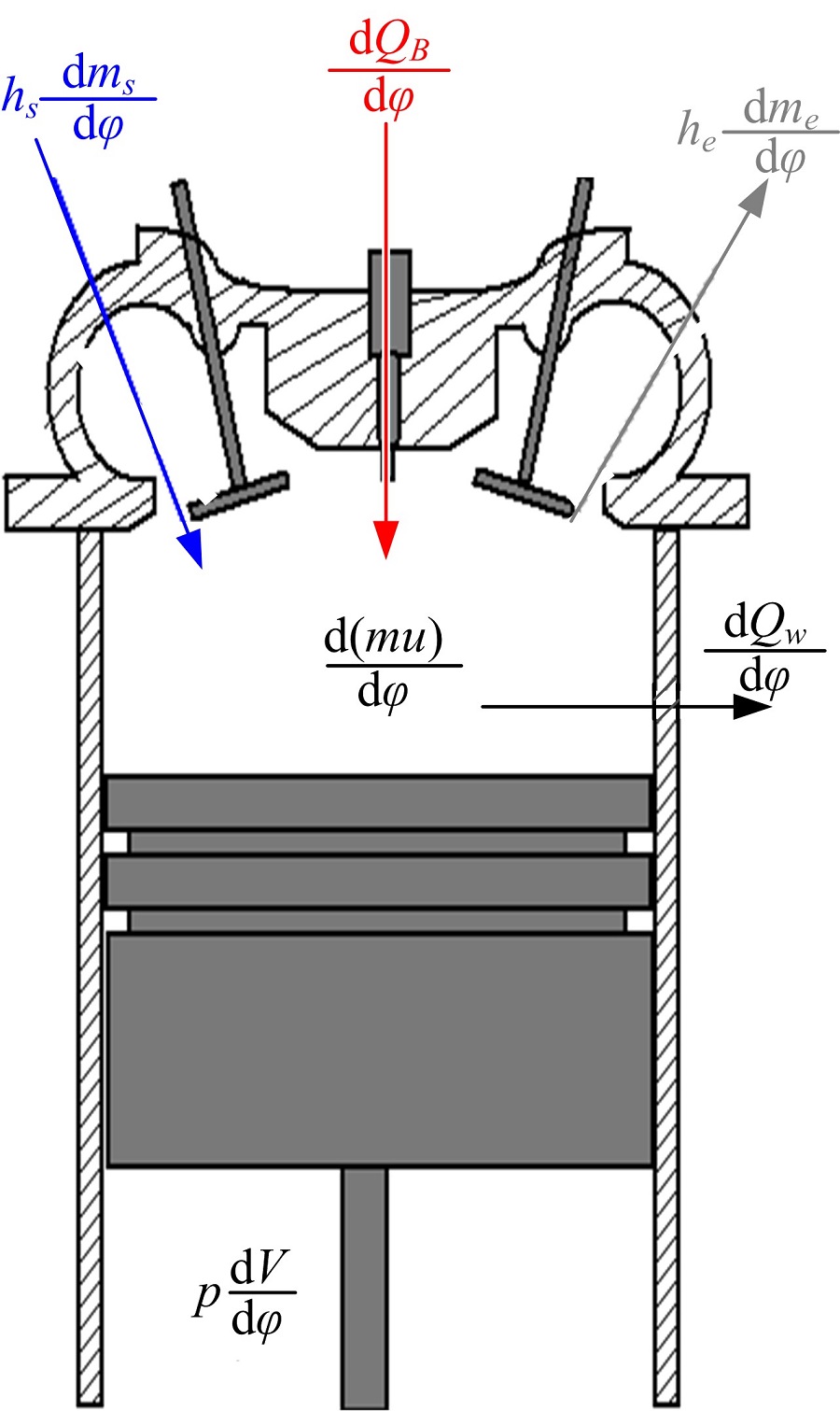 | 图2 发动机气缸工作过程示意图Fig.2 Schematic diagram of engine cylinder working process |
(1)气缸内工质分布均匀, 即在同一时刻, 气缸内压力、温度、浓度处处相同。
(2)可燃气体为理想气体, 即系统的比热容c、比焓
(3)工质进入或排出气缸时的流动过程可以被视为是准稳定流动, 即假设步长足够小, 此时可以当作是稳定流动。
(4)忽略气体在进、出口的动能量。
(5)工质燃烧释放热能的过程, 按已知的放热规律加热气缸内的工质。
1.2.2 气缸内热力过程的基本微分方程
根据热力学第一定律以及能量守恒方程, 可建立气缸内热力学过程模型, 其详细建模过程可参见文献[12], 本文只简略给出其建模过程。首先, 建立发动机气缸内能变化方程如下所示:
式中:
对于柴油机而言, 系统内能可简化为只与缸内工质温度以及工质瞬时过量空气系数有关的函数,
因此, 式(2)可以写成下式:
将式(4)代入式(1)中, 且有
柴油机工作过程中存在着燃料的泄漏情况, 该部分燃料损失较小可忽略不计, 缸内气体质量变化满足质量守恒方程, 计算如下:
它由以下几个部分组成:
当循环喷油量
以发动机曲轴转角为变量表示的燃料热量变化率可以表示为:
式中:
当柴油机稳定工作时, 可取
当缸内气体工质是理想气体时, 可得到下式:
式中:
由式(9)和式(5), 可得到下式:
式中:
1.2.3 发动机与启停电机耦合机理
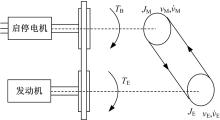
在发动机启停控制中, 通过控制启停电机的输出力矩使发动机转速跟踪期望, 启停电机(Belted starter/alternator, BSA)与内燃机的连接结构图如图3所示, 启停电机通过皮带与内燃机相连, 发动机与电机的皮带传送比例为1:1, 因此当车辆在怠速时启停电机能以最大的输出力矩传递能量以满足发动机需求[10]。上述系统的运动公式如下:
式中:
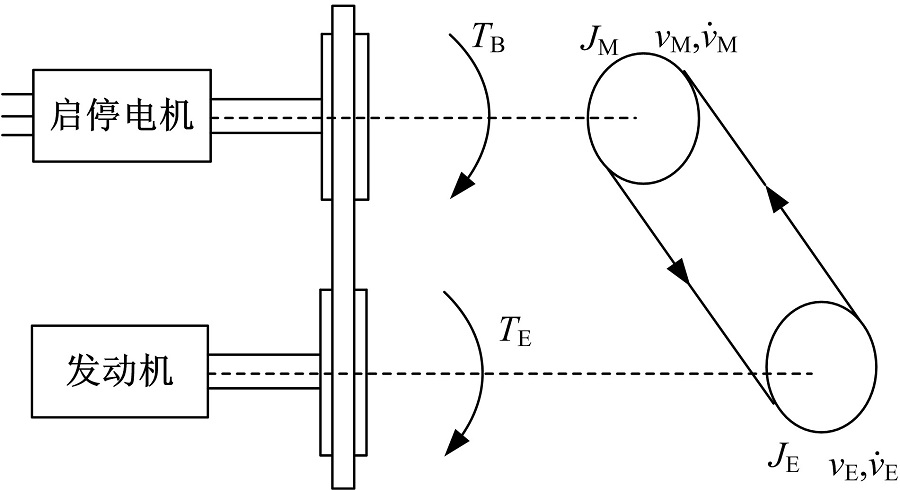 | 图3 发动机与电机连接示意图Fig.3 Engine and motor connection diagram |
发动机与电机的耦合模型可由式(11)(12)的非线性微分方程表示, 假设皮带传动是理想的传动过程, 电机与发动机转速差较小, 可忽略不计。实验数据表明, 皮带刚度系数较大时系统有高频率的小幅波动[15], 假设皮带连接是刚性连接, 则有:
发动机的瞬时扭矩可表示为:
则将式(13)(14)带入式(11)可得:
式中:
发动机的摩擦力矩可由下式计算:
式中:
发动机指示力矩计算公式为[11]:
式中:pamb表示大气压强;
在实验测量中往复惯性力矩
式中:
为了模拟启停过程的瞬态动力学特性, 在AMESim环境下搭建了发动机启停系统仿真模型, 如图4所示。在AMESim草图模式下选择了IFP发动机库里的DFM(Dual flame model)模型, 子模型选择了ENGDFM00, 该模型能够比较真实地模拟实际发动机的工作过程和动态特性, 包括对气缸内压力动态、热量散失、燃料蒸发过程以及燃烧过程等。发动机的进排气过程受到进排气阀开关的影响, 在IFP发动机模型库中选择阀门模型模拟系统进排气阀, 进排气阀开关可通过查询相应的map表得到当前对应的开关动作。在发动机启停模型中, 电机的输出直接与发动机曲轴相连, 电机带动发动机启动, 即可通过控制电机的输出达到启动发动机的目的, 设计模型的过程中, 可以认为电机是理想的。
发动机模型的参数如下:连杆长度为143.6 mm; 发动机冲程为94.4 mm; 发动机压缩比为16.2; 气缸缸径为82 mm; 气缸数为4; 绝热系数为1.4; 气体常数为287; 发动机转动惯量为0.49; 热能系数为4.2× 107; 外界温度为293 K; 参考温度为273 K; 参考压力为10 300 Pa。
 | 图4 AMESim仿真模型示意图Fig.4 Schematic diagram of AMESim simulation model |
(1)模型运动与做功规律分析
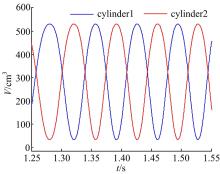
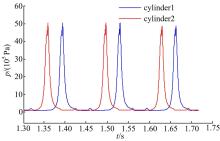
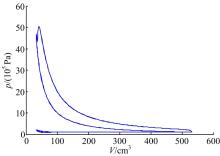
发动机瞬态模型气缸缸内体积变化曲线如图5所示, 在该模型中发动机各缸做功顺序为1-3-4-2, 发动机缸内体积变化曲线是一种类正弦曲线, 从图5中可以看出, 各气缸活塞运动规律相同, 相位不同, 符合发动机活塞运行规律。发动机活塞速度位移曲线如图6所示, 活塞速度位移曲线也似类正弦曲线, 由图6可以看到因曲轴机构与外部飞轮连接, 飞轮起到了调节转速的作用, 故活塞速度位移曲线呈水平对称。图7为发动机模型的气缸缸压曲线图, 在发动机进气的过程中, 缸内气体压力的波动较小, 压缩冲程时, 缸内压力升高较明显, 当燃油燃烧膨胀后, 气缸内的压力急剧上升, 膨胀冲程结束缸内压力下降, 当排气阀开启之后, 缸内的压力下降比较迅速, 发动机模型示功图如图8所示。
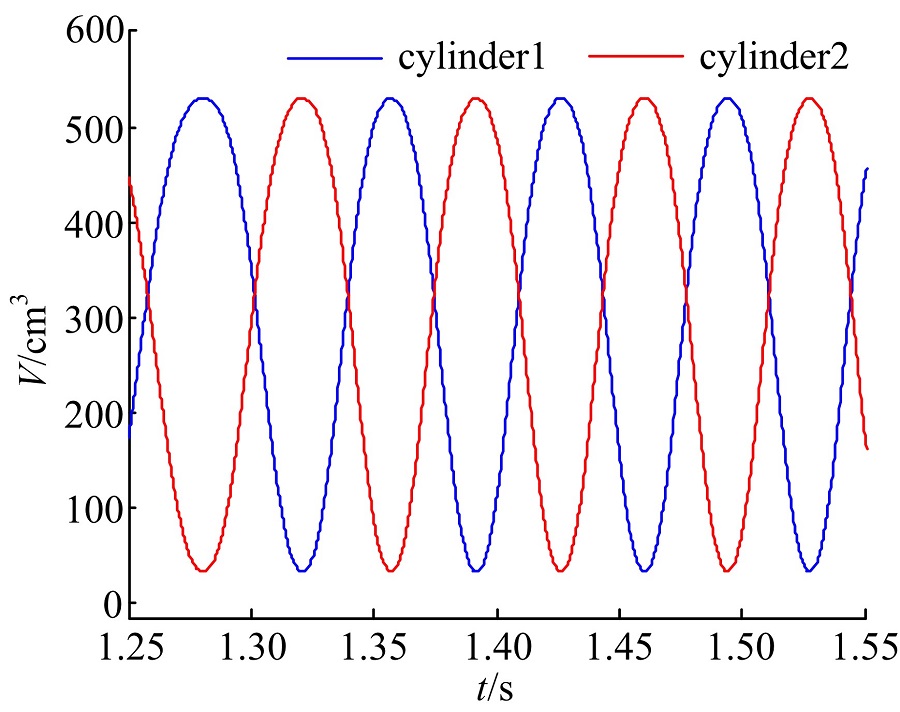 | 图5 发动机容积Fig.5 Engine volume |
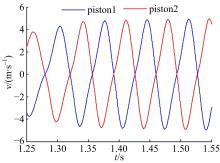
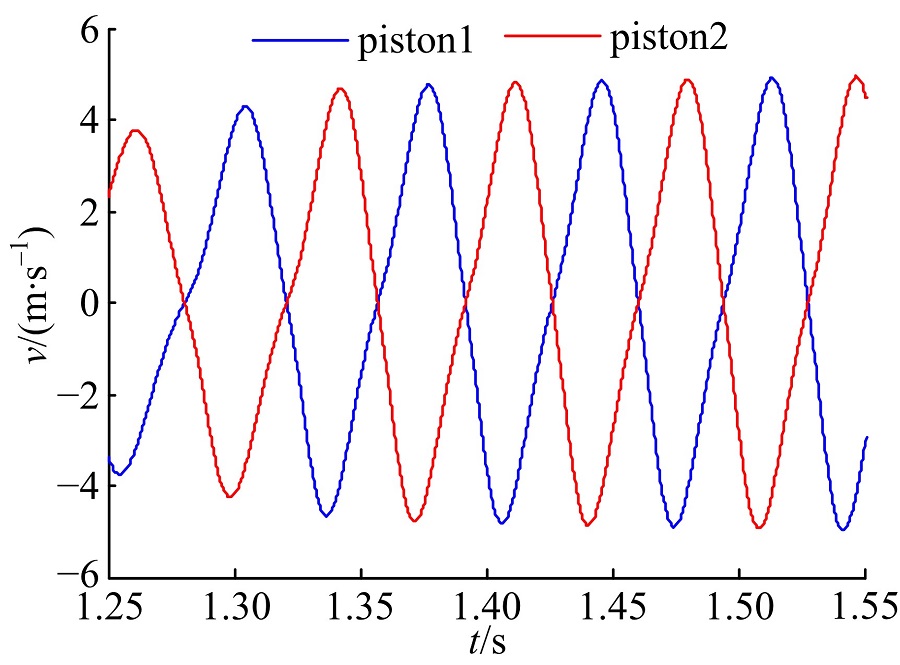 | 图6 活塞速度位移Fig.6 Displacement of piston velocity |
 | 图7 气缸缸压Fig.7 Cylinder pressure |
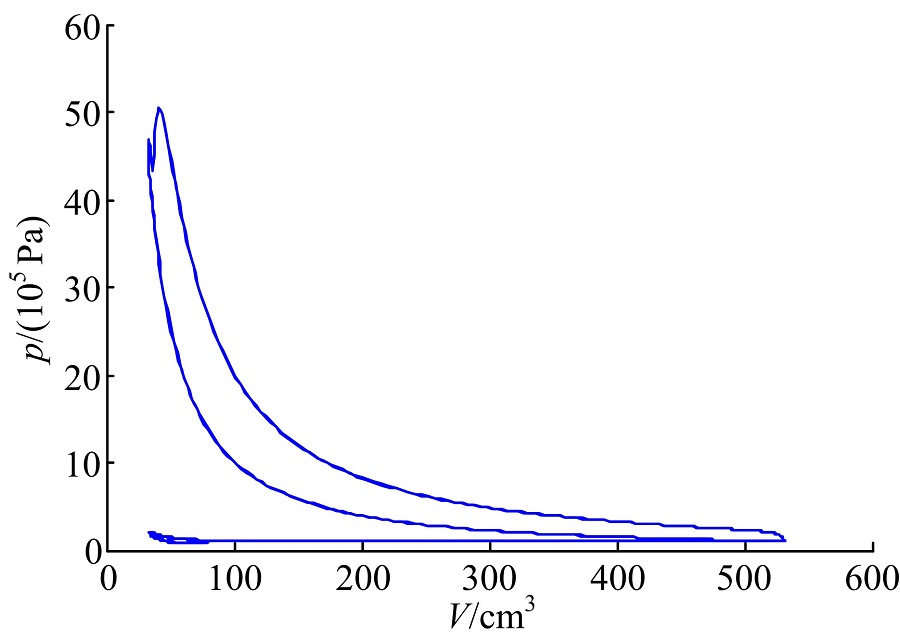 | 图8 发动机p-v曲线Fig.8 Engine p-v curve |
结合上述仿真分析可知, 利用AMESim搭建的模型能够反映发动机运行与做功规律, 上述分析从功能上验证了该模型的合理性。
(2)模型动力学特征
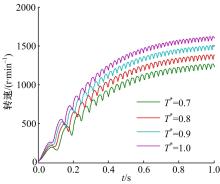
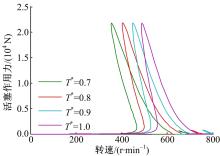
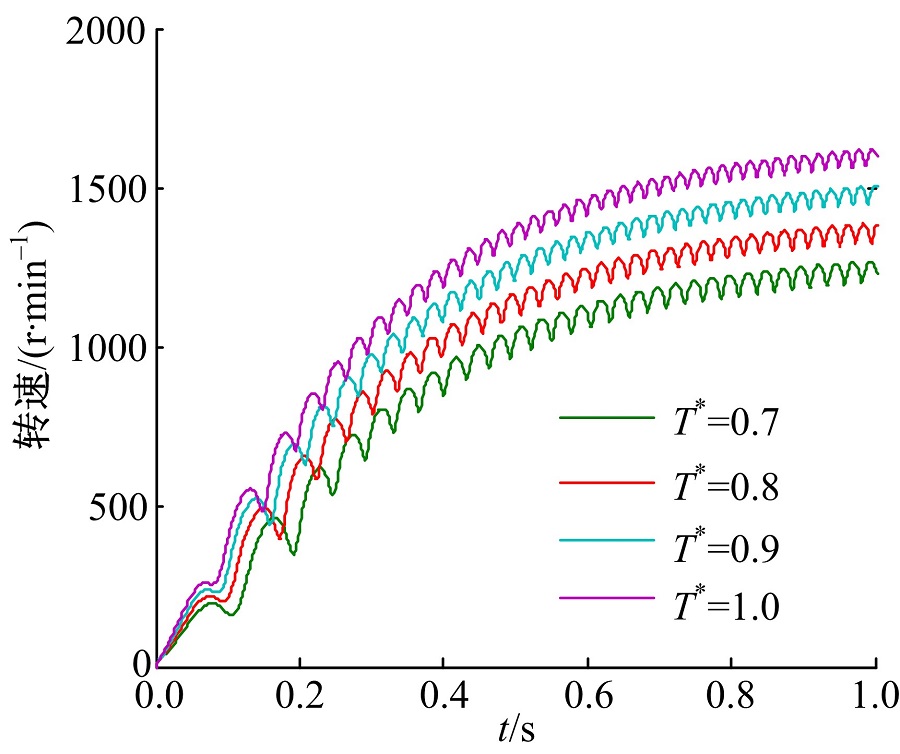
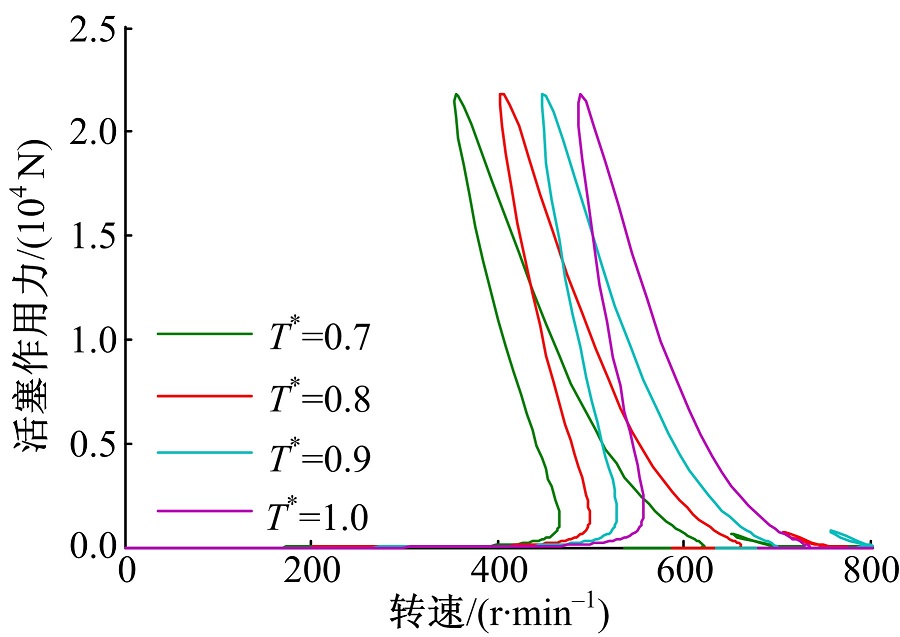
在实际启动过程中, 系统的输入是电机的力矩。在电机拖动情况下, 设置不同的电机输出T* , 进行仿真实验。图9为不同电机力矩作用下, 发动机转速输出曲线。可以看出, 电机输出越大, 则发动机转速上升越快。图10为发动机活塞作用力曲线, 电机输出越大, 活塞作用力相同时, 发动机转速越高。
 | 图9 电机输出扭矩输出特性Fig.9 Characteristic curve of motor torque |
 | 图10 活塞作用力与电机扭矩输出特性Fig.10 Characteristic curve of piston force and motor torque |
结合上述仿真分析可知, 利用AMESim搭建的仿真模型符合启停控制系统的运动规律与动力学特性, 至此发动机系统仿真模型搭建完毕。
假设驱动电机为理想电机, 结合式(18)和(19), 可以得到面向控制器设计的系统模型为:
式中:
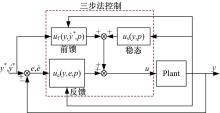
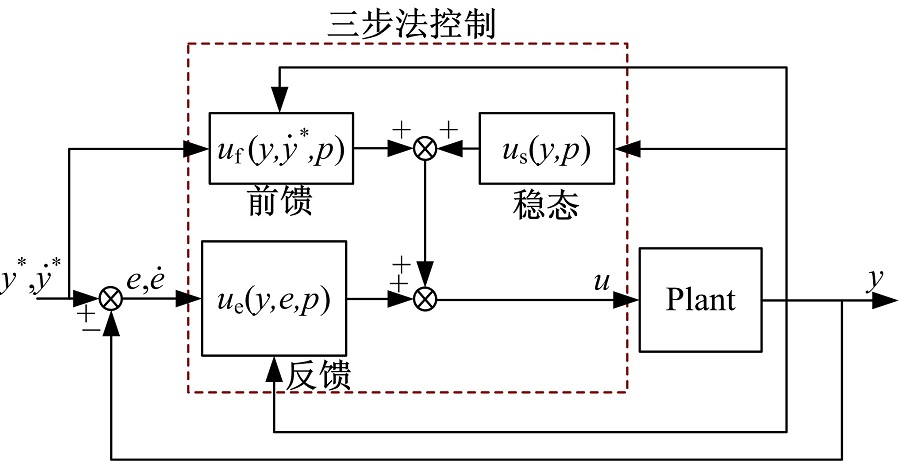
三步法[17]的系统控制框图如图11所示, 该方法由3部分组成, 其中
 | 图11 三步法控制框图Fig.11 Block diagram of triple-step control |
(1)类稳态控制
当系统进入稳态时,
稳态控制
(2)参考前馈控制
对于大多数的控制系统而言, 运行工况多变, 对于启停系统来说参考输入不是恒定的, 只依靠稳态控制并不能使系统满足系统的控制需求, 考虑到发动机转速的期望是动态变化的, 因此考虑系统动态变化对系统造成的影响, 令
(3)误差反馈控制
当系统受到外部干扰时, 仅仅依靠稳态和参考动态这两种控制并不能保证系统的稳定性, 第三步通过引入带有积分的反馈控制实现系统的跟踪控制, 与前面的两步相似, 本文将利用闭环反馈并结合前两步的控制推导系统的控制律, 将
式中:
为了在控制率中引入积分项以减小稳态误差, 定义误差的积分为:
采用Lyapunov稳定性理论进行控制器设计及稳定性分析, 为此首先定义Lyapunov函数为:
式中:
对式(25)两端进行求导, 同时将式(23)(24)代入, 整理得:
为了保证Lyapunov函数的导数负定, 选择反馈控制器的形式为:
式中:
由上式可知, 当且仅当e=0, χ =0时(由e=0, 可知χ =∫ e=0), 有
综上可以得到控制律为:
由上述推导可知, 针对启停系统的三步法控制器各个环节的控制律均已推导完毕。
将系统的建模误差考虑成幅值有界的扰动d, 在输入到状态稳定性理论框架下, 分析闭环误差系统的鲁棒稳定性。为此, 结合(23)(24)及(27), 整理可以得到带有扰动的闭环误差系统为:
将式(30)和(31)写成矩阵形式, 可得:
式中:
式(32)为一个线性系统, 2.1节中已经证明了在不考虑扰动
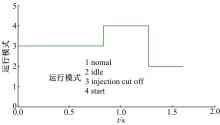
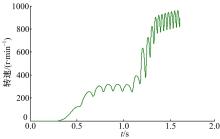
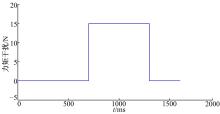
利用AMEsim与MATLAB/Simulink进行联合仿真实验, 为验证三步法启停控制器的有效性, 首先对仿真工况进行设置, 发动机模式如图12所示, 在0.8 s前发动机处于停止状态不对外输出做功, 0.8 s后进入发动机启动模式, 从进入启动模式起至发动机转速上升至理想怠速, 该过程应控制在0.4 s以内。在普通电机作用下, 发动机启动时转速曲线如图13所示, 可以看到发动机转速从0开始到发动机正常启动, 该过程为1 s左右, 启动时间较长。
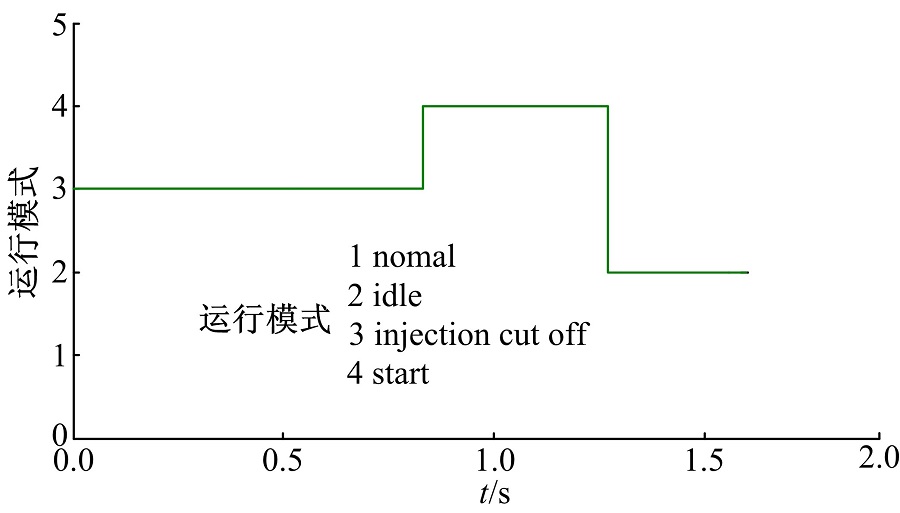 | 图12 发动机运行模式Fig.12 Engine operating mode |
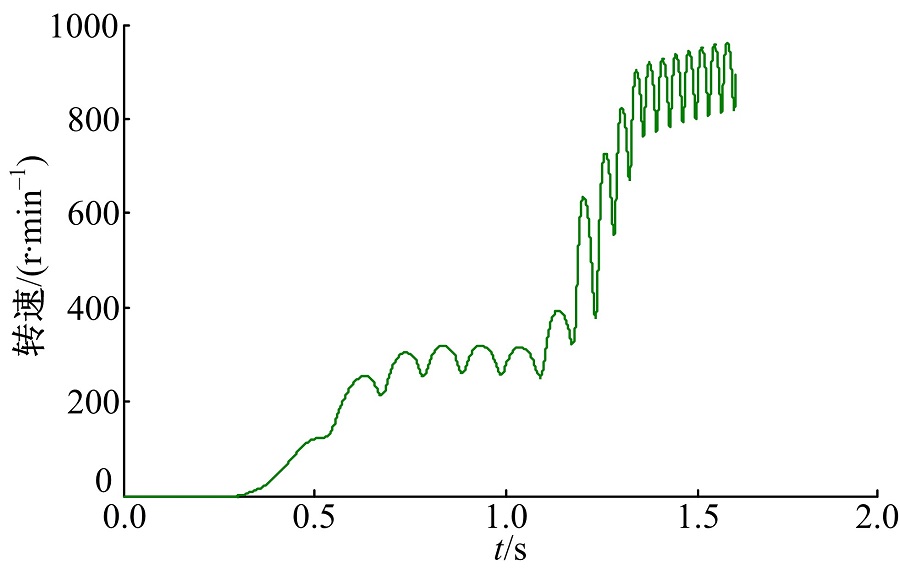 | 图13 发动机转速曲线Fig.13 Engine speed curve |
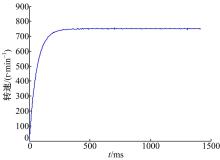
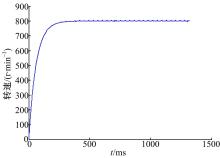
(1)系统无外界干扰
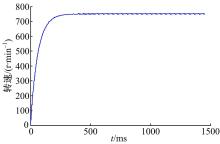
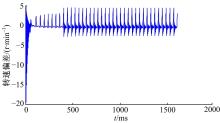
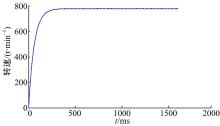
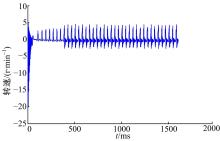
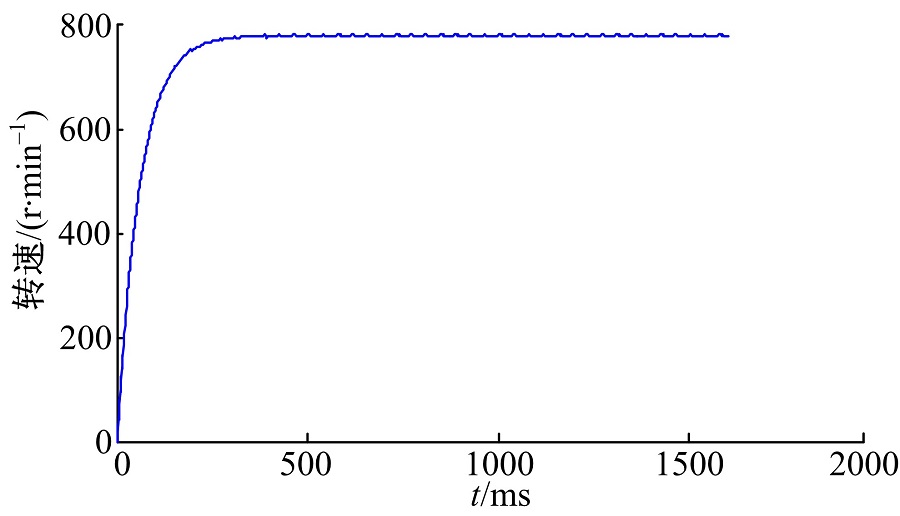
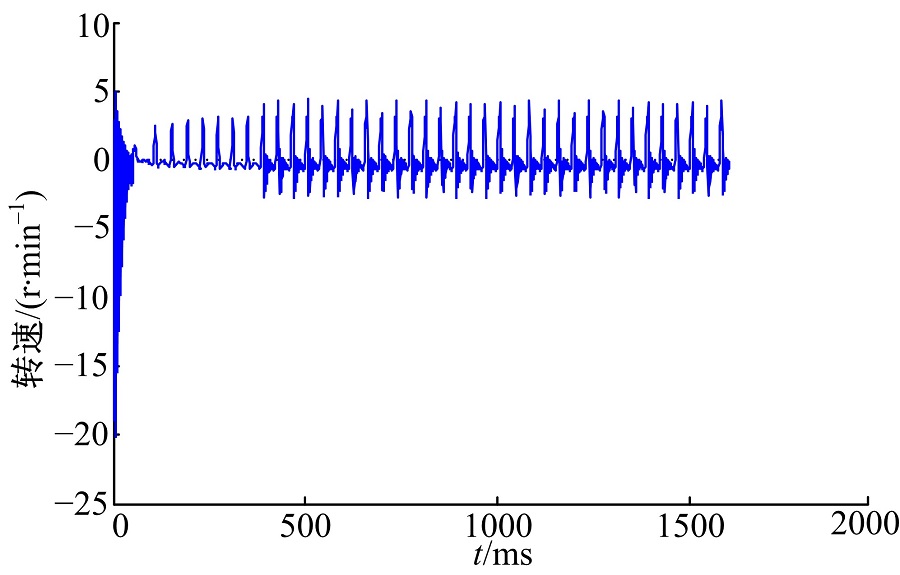
发动机启动模式下, 考虑系统无外界干扰情况, 在基于三步法控制器的作用下, 控制器输出电机期望力矩, 发动机转速与期望转速的差值减小, 此时发动机转速设为启动过程发动机期望转速。发动机转速变化与期望转速的偏差如图14~图19所示, 考虑到不同类型的发动机启动时期望怠速是不同的, 且发动机冷机启动情况下理想的怠速较高, 故分别在理想怠速为750、780、800 r/min时进行仿真实验, 得到图14~图19仿真实验曲线。
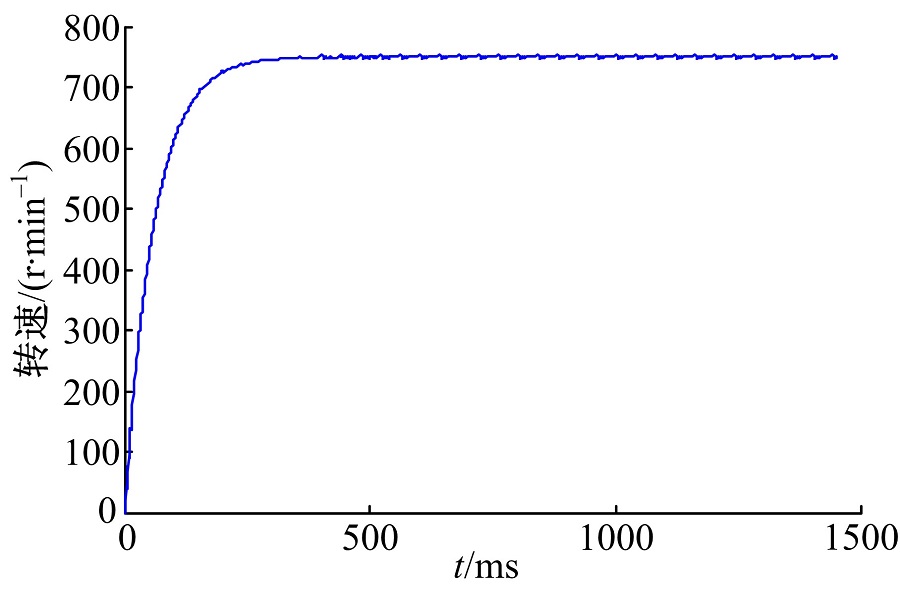 | 图14 三步法(750 r/min)Fig.14 Triple-step(750 r/min) |
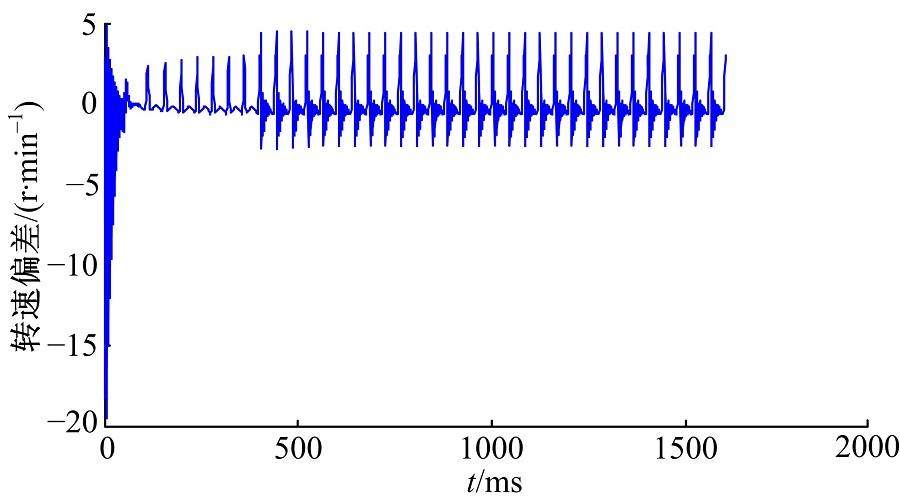 | 图15 转速偏差(750 r/min)Fig.15 Speed error(750 r/min) |
 | 图16 三步法(780 r/min)Fig.16 Triple-step(780 r/min) |
 | 图17 转速偏差(780 r/min)Fig.17 Speed error(780 r/min) |
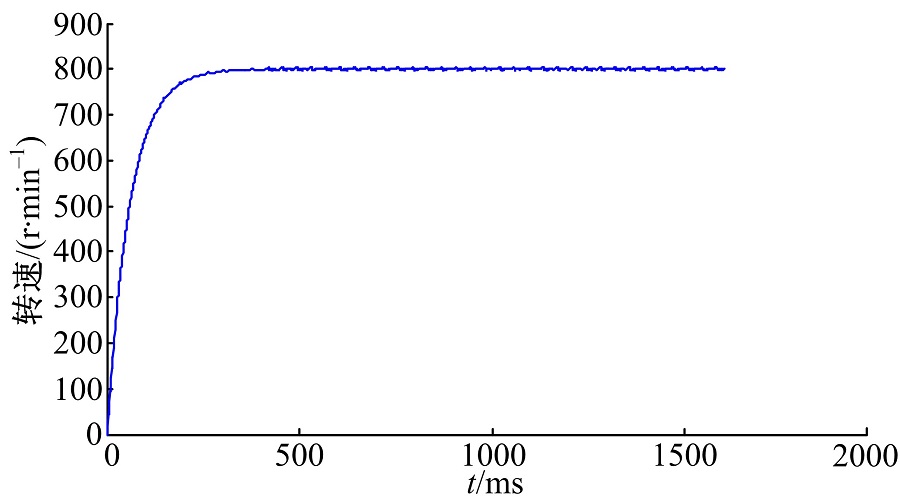 | 图18 三步法(800 r/min)Fig.18 Triple-step(800 r/min) |
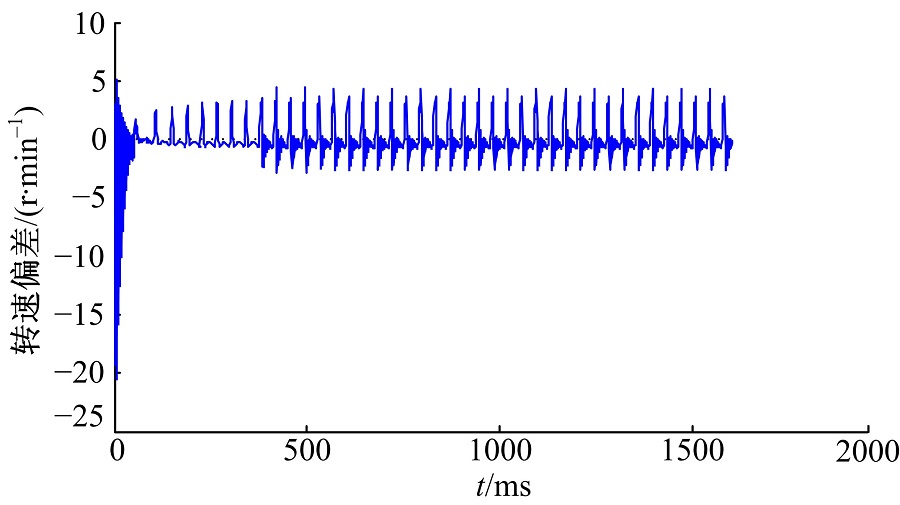 | 图19 转速偏差(800 r/min)Fig.19 Speed error(800 r/min) |
从图14~图19仿真曲线可以看到, 发动机经过0.25 s后开始正常工作, 当发动机开始工作后, 由于瞬态发动机模型缸内压力变化引起转速波动, 转速波动保持在± 5 r/min, 此时系统的延迟时间为0.04 s, 上升时间为0.132 s, 峰值时间为0.27 s, 调节时间为0.18 s, 超调量为0.6%。通过仿真实验分析可知发动机能够较为快速地启动并跟踪期望。
(2)系统存在外界干扰
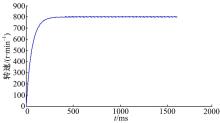
在实际发动机启停系统中, 电机输出力矩将受到外界干扰而偏离实际输出, 电机输出力矩扰动可以反映在发动机转速上, 电机所受干扰如图20所示, 从0.7~1.3 s电机受到幅值为15 N· m的干扰, 该数值为电机峰值扭矩的10%左右, 在该控制系统仿真中, 扰动一般取这个数值来验证系统的抗干扰性能, 在干扰作用下系统响应曲线如图21~图24所示。
由图21~图24可以看到, 从0.7 s系统受到干扰后发动机转速波动为± 5 r/min, 经过0.01 s后发动机转速跟踪上期望, 从1.3 s后系统干扰消失, 此时发动机转速波动为± 5 r/min, 经过0.01 s后发动机转速跟踪上期望。从干扰出现到消失这段时间内, 在三步法控制器的控制作用下, 发动机转速可以快速跟踪期望,
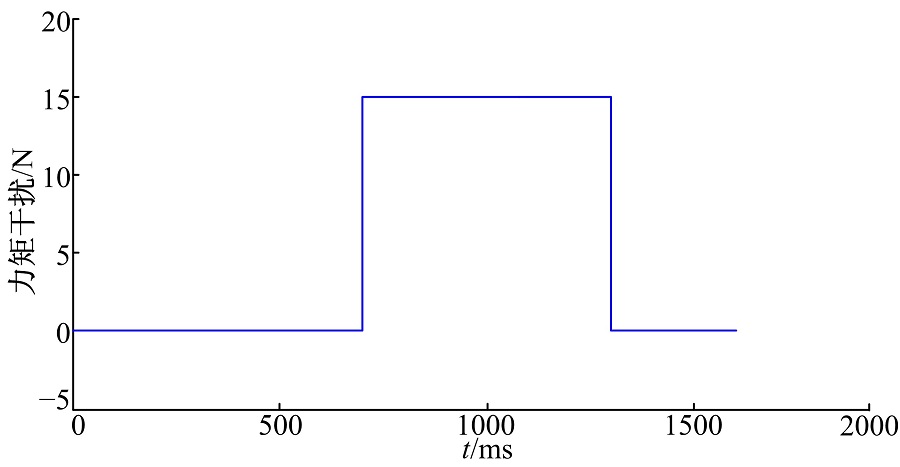 | 图20 力矩干扰Fig.20 Torque disturbance |
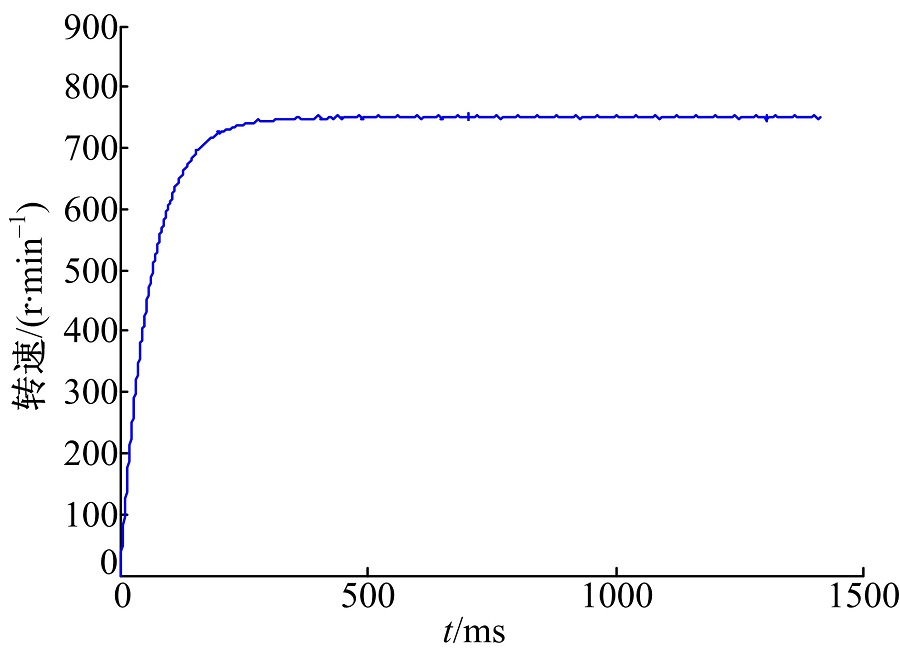 | 图21 干扰作用下转速曲线(750 r/min)Fig.21 Speed curve with disturbance(750 r/min) |
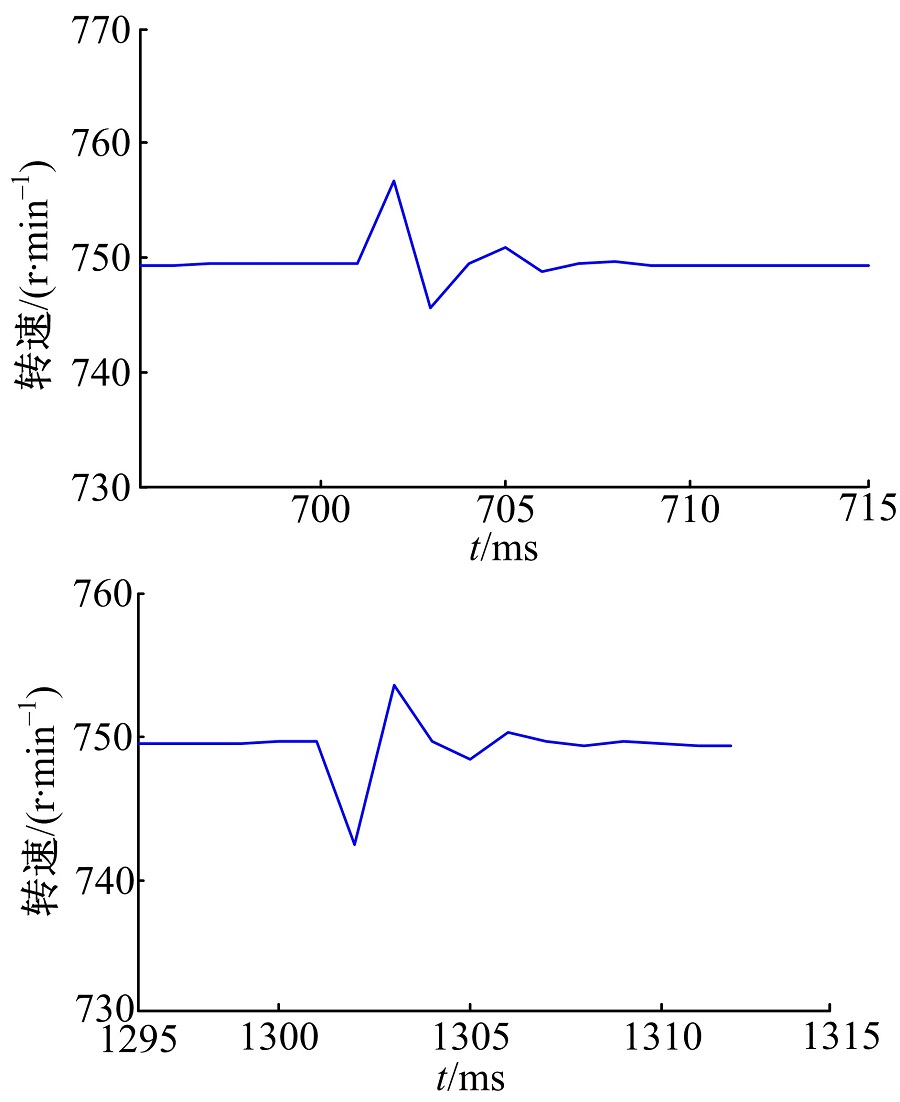 | 图22 图21局部放大(750 r/min)Fig.22 Partial zoom in Fig.21(750 r/min) |
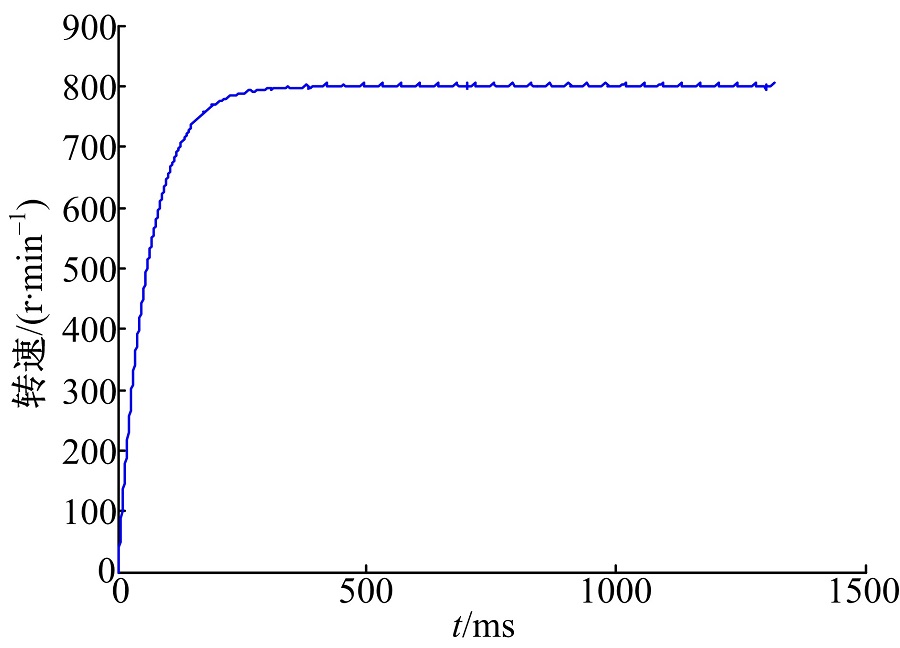 | 图23 干扰作用下转速曲线(800 r/min)Fig.23 Speed curve with disturbance(800 r/min) |
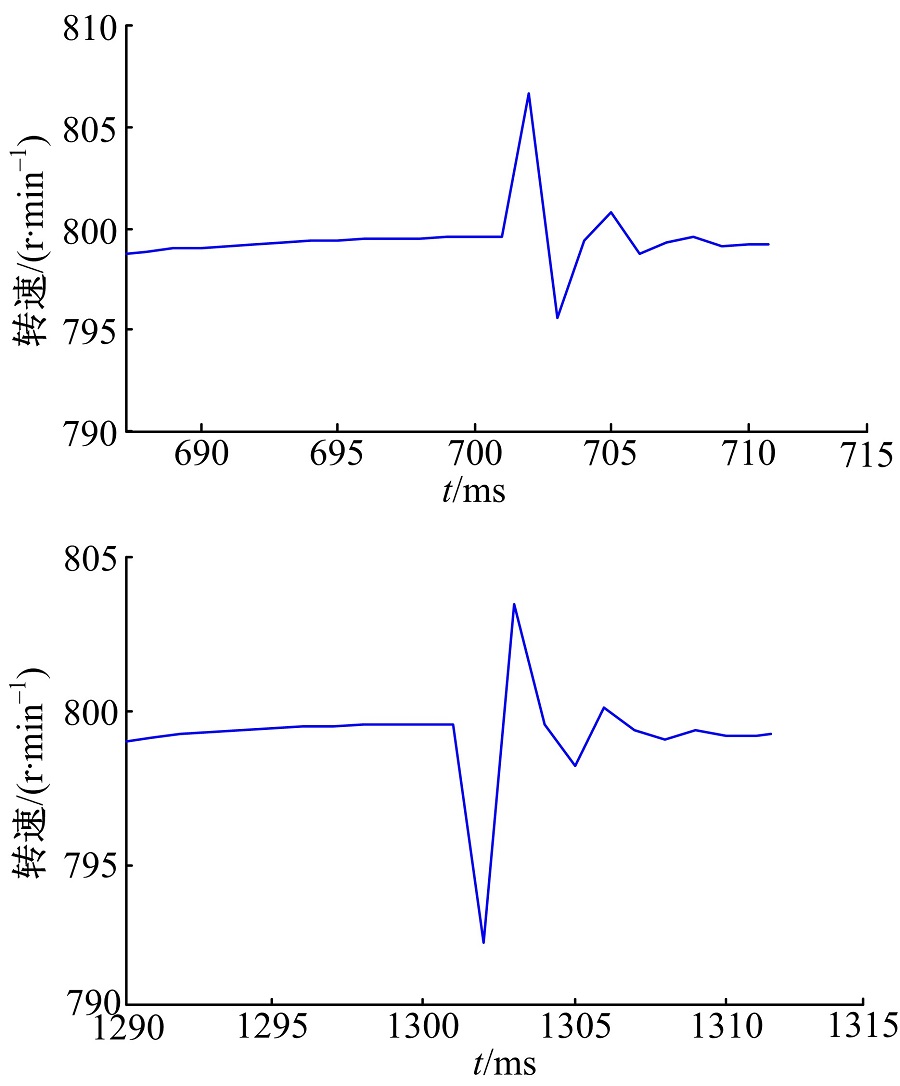 | 图24 图23局部放大(800 r/min)Fig.24 Partial zoom in Fig.23(800 r/min) |
并在期望值附近稳定运行, 从而证明了该系统具有抗干扰性能。
针对发动机启停系统控制问题, 将启停控制问题描述为转速跟踪问题, 设计了基于三步法的发动机启停控制器。首先根据发动机的运行机理, 在AMESim环境下搭建一个发动机瞬态模型。然后利用非线性系统设计方法— — 三步法, 设计了发动机启停系统控制器, 并在ISS理论框架下对闭环系统的鲁棒性进行了分析, 从理论上证明了该系统具有抗干扰性能。最后, 通过AMESim与Simulink进行联合仿真实验, 仿真结果表明, 在三步法控制器的作用下, 发动机可快速平稳启动, 系统的延迟时间为0.04 s, 上升时间为0.132 s, 峰值时间为0.27 s, 调节时间为0.18 s, 超调量仅为0.6%; 在干扰作用下, 发动机转速波动在± 5 r/min以内, 经过0.01 s后发动机转速跟踪上期望, 从而验证了非线性三步法启停控制器的跟踪性能和鲁棒性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|