



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
针对大滞后系统的滞后时间削弱自抗扰控制方法
[王春阳 , 辛瑞昊, 史红伟]
, 辛瑞昊, 史红伟]
, 辛瑞昊, 史红伟]
|
|


作者简介:王春阳(1964-),女,教授,博士生导师.研究方向:复杂运动系统高精稳定控制.E-mail:wangchunyang19@cust.edu.cn
针对工业中较难控制的大滞后系统,提出了一种滞后时间削弱的自抗扰控制方法,该方法首先将大滞后对象转化为小滞后对象,然后结合自抗扰控制思想对简化后的小滞后对象进行控制。本文方法解决了传统Smith预估控制等方法在被控对象模型预估不准确的情况下很难取得较好的控制效果的问题,并改善了自抗扰控制器在滞后时间较大的情况下稳定时间较长的缺点。最后将该方法与传统的PID结合Smith预估控制及自抗扰控制的控制效果进行对比。仿真结果表明,本文控制方法可以有效地改善大滞后对象的控制效果,提高了系统的动态性能和鲁棒性。
In this paper, a new method is proposed to control large time delay systems. First, the large lag time is transformed into small lag time through the decreasing time delay theory. Then, auto-disturbance rejection control theory is used in the transformed object to improve the performance of the system. The method can be used to solve the problem that traditional PID with Smith control method can not achieve better control effect on the inaccurate object model. The method also overcomes the shortcoming that the single auto-disturbance rejection controller has a long setting time. The control effect of this method is compared with the traditional PID with Smith control method and the single active disturbance rejection control method. Simulation results show that this method can achieve a better control effect for large time delay systems. It can effectively improve the dynamic performance and robustness of the system.
大滞后对象广泛存在于化工、石油、冶金、制药和造纸等工业生产过程中。由于时滞的存在, 当前施加到系统的控制量要经过一段时间的延时才能反映到系统输出端; 而且当系统受到干扰而引起被调量改变时, 控制器产生的控制作用不能立即对干扰产生有效的抑制作用, 因此控制系统容易产生较大的超调量和较长的调节时间[1, 2, 3]。一般用滞后系统的滞后时间常数
针对大滞后系统的研究一直是国内外众多学者关注的热点。传统的控制方法如Smith预估控制[4]、Dahlin算法等[5, 6], 从理论上解决了大滞后系统的控制问题, 但在实际应用中仍存在较大的局限。传统的控制方法严重依赖于被控对象的模型, 当建模存在微小误差或者由于干扰而产生变化时, 就会对系统产生较大影响, 甚至造成系统不稳定。因此, 在实际工程中, 需要的是不依赖于模型的控制方法。近年来, 随着模糊控制、神经网络控制、分数阶控制等研究的深入, 有些学者将这些方法与Smith预估控制等方法相结合, 提出了一些针对大滞后系统的改进控制方法[7, 8, 9, 10]。虽然有些控制方法效果不错, 但是系统的复杂程度和调试难度也会随之增大, 在实际应用中难以推广。
相比之下, 自抗扰控制技术(Auto-disturbance rejection control, ADRC)是一种不依赖于系统模型的新型控制技术, 它继承了PID控制技术“ 基于误差来消除误差” 的思想, 具有精度高、扰动抑制能力强及算法简单等优点[11, 12, 13, 14]。文献[15, 16]阐述了自抗扰控制技术的基本思想, 并证明了自抗扰控制器具有良好的适应性和鲁棒性。文献[17]中首次将自抗扰控制器用于大滞后系统, 为大滞后系统的研究提供了一个新的途径。但是, 由于自抗扰控制器本身的特点, 该控制系统的稳定时间大概为滞后时间的3~4倍[18], 严重影响了系统的动态性能。
针对这一问题, 本文提出了一种滞后时间削弱的自抗扰控制方法。首先采用滞后时间削弱方法, 将大滞后时间转化为小滞后时间。然后结合自抗扰控制方法对转化后的小滞后对象进行控制。仿真结果表明, 该方法克服了Smith预估控制等传统方法对被控对象精确模型的依赖问题, 同时解决了自抗扰控制器稳定时间长的缺点。当模型存在误差和干扰时, 本文方法可有效地对误差进行补偿, 提高系统的动态性能、鲁棒性和抗干扰能力, 较好地改善了大滞后系统的控制效果。
本文选择带有纯滞后的一阶惯性环节作为系统的被控对象, 该对象通常被认为是研究滞后问题的典型对象, 设被控对象的传递函数为:
令1⁄( Ts+1)=G0(s), 本文选取被控对象的积分时间常数为T=0.1, 滞后时间常数为τ =30。由于滞后时间常数与积分时间常数之比为τ /T=300, 因此, 该对象是典型的大滞后被控对象。
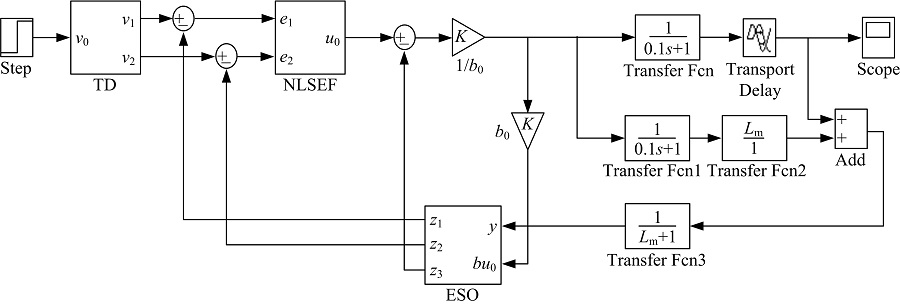
构建大滞后控制系统结构如图1所示。该控制系统包含有两部分:一部分为自抗扰控制器, 其中包括跟踪微分器(Tracking differentiator, TD)、扩张状态观测器(Extended state observer, ESO)以及非线性状态误差反馈(Nonlinear state error feedback, NLSEF); 另一部分为滞后时间削弱系统
 | 图1 系统结构框图Fig.1 System structure diagram |
滞后时间削弱的目的是将大时间延迟转化为小时间延迟, 以减小纯滞后时间对系统性能的影响。如图1所示, 被控对象
对时滞环节
再次利用
比较式(1)和式(4)可以看出, 等效的被控对象环节Geq(s)的纯滞后时间是被控对象纯滞后时间的1/(Lm+1)倍[10, 20]。因此大滞后被控对象被化简为了小滞后被控对象。
在对被控对象化简的理论分析中, 采用了两次Taylor近似, 相当于在被控对象模型中引入了不确定因素。由于在工业生产中, 实际被控对象与模型不一致是普遍存在的, 而且要远大于Taylor近似引入的误差, 所以这种近似具有可行性。将近似引入的误差视为系统不确定性的一部分, 其影响可以由自抗扰控制策略加以估计和补偿。
由图1可以看出, 系统的实际输出为y(t), 系统的反馈为
由于在工程上时滞环节可以等效近似为一阶惯性环节, 因此本文采用二阶自抗扰控制器(ADRC)来控制大滞后系统, 即相当于用二阶ADRC来控制一个二阶对象。如图1所示, 图中虚框中ADRC主要由TD、ESO、NLSEF三部分组成。
TD目的是对初始信号进行预处理, 要求合理地跟踪原信号并提取其微分信号, 为系统提供一个过渡过程, 避免由信号跳变引起的激烈震荡, 可以较好地解决系统“ 快速性” 和“ 超调” 之间的矛盾, 提高了系统的鲁棒性。
TD控制率如下:
式中:
式中:
ESO是自抗扰控制技术的核心, 它将系统内部和外部的各种扰动都归结为系统的总扰动, 并将这些影响系统输出的总扰动因素扩张成新的状态变量, 并用特殊的反馈机制来消除这些扰动因素; 然后对系统状态和总扰动进行实时估计; 最终实现对扰动的补偿。
ESO控制率如下:
式中:
三阶ESO共有7个参数, 分别为
NLSEF通过非线性函数把由TD产生的跟踪信号和微分信号与被控对象的状态估计量的误差进行非线性组合, 得到被控对象初步的控制量; 然后结合扩张状态观测器对系统总扰动的估计量对误差进行补偿, 得到最终的控制量, 并输入给被控对象。NLSEF控制率如下:
式中:
本文选取的被控对象传递函数为:
该对象为典型的一阶大滞后研究对象, 可以表示工业中大多数大滞后系统的特性。为验证本文控制方法的控制效果, 选择传统PID结合Smith预估控制和单一的自抗扰控制两种控制方法作为对比, 对3种方法的控制效果进行对比分析。
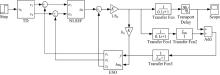
根据所提出的控制方案, 在Matlab/Simulink中搭建了图2所示的控制系统仿真模型。
 | 图2 Matlab/Simulink仿真模型Fig.2 Simulation model in Matlab/Simulink |
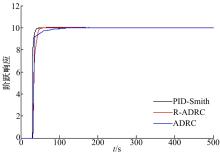
选择输入信号为阶跃信号, 信号幅值为10个单位。系统的阶跃响应如图3所示。为增加自抗扰控制器与滞后时间削弱控制器的可比性, 设定两个控制器参数基本一致。3种控制器的参数选择如下:
PID结合Smith预估控制参数为:
单一的自抗扰控制器参数为:r=1.1, h=0.01, a01=0.5, a02=0.25, δ =0.05, b0=88, β 01=40, β 02=200, β 03=400, a1=0.5, a2=1.25, δ 0=0.3, β 1=25.5, β 2=33。
滞后时间削弱自抗扰控制器参数为:r=1.02, h=0.01, a01=0.5, a02=0.25, δ =0.03, b0=88, β 01=40, β 02=200, β 03=400, a1=0.5, a2=1.25, δ 0=0.3, β 1=25.1, β 2=32.8, Lm=3。
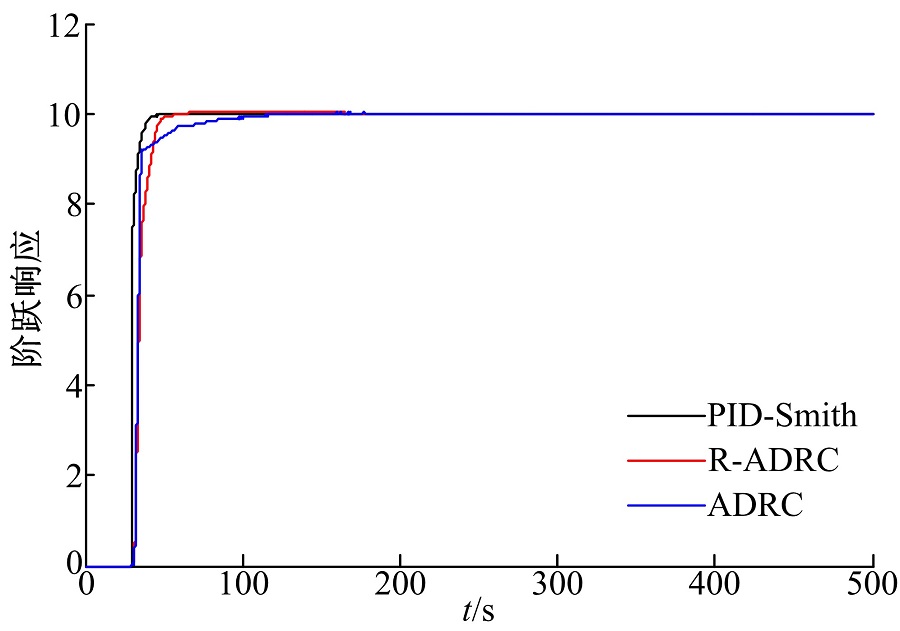 | 图3 系统阶跃响应Fig.3 Step response of system |
由图3可知, 在被控对象模型精确的情况下, PID结合Smith预估控制效果最好, 稳定时间大约为45 s; 其次为滞后时间削弱的自抗扰控制器, 稳定时间大约为50 s; 而单一的自抗扰控制器稳定时间为110 s, 稳定时间约为滞后时间的3~4倍, 与文献[18]在被控对象一致情况下, 所得到的仿真结论一致。比较单一自抗扰控制器参数与滞后时间削弱的自抗扰控制器参数可以看出, 两种方法所采用的控制参数并没有太大的变化, 但是滞后时间削弱的自抗扰控制器取得了更好的控制效果, 稳定时间缩小了1倍以上。
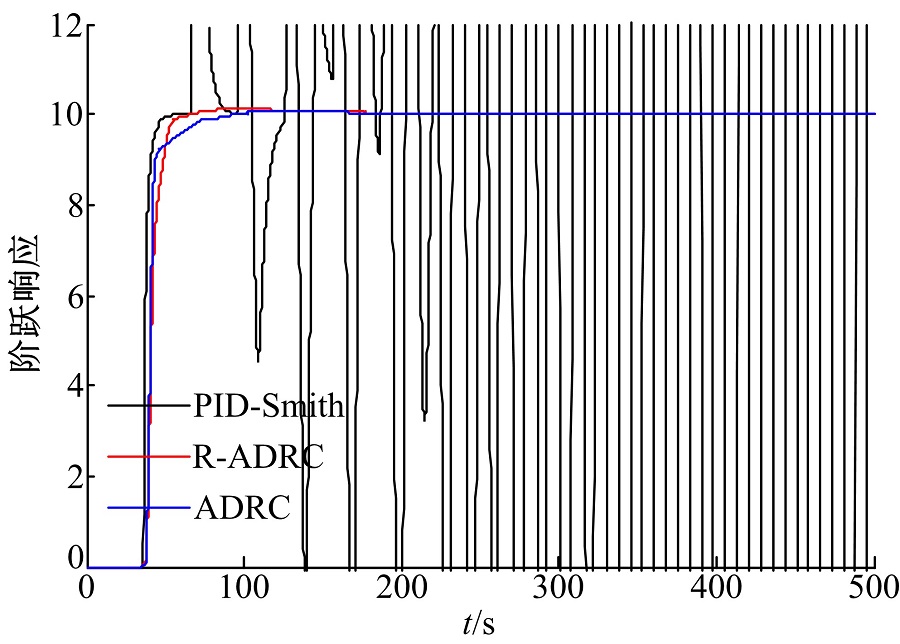
研究当被控对象模型不准确时3种控制方法的控制效果。保持3种控制器参数不变, 将被控对象积分时间常数T增大10倍, 系统阶跃响应控制效果如图4所示。
 | 图4 积分时间常数T增大10倍系统的阶跃响应Fig.4 Integral time constant T increased by 10 times |
与图3相比, PID结合Smith预估控制产生了严重的超调, 稳定时间也相应增大, 控制效果明显变差。而单一的自抗扰控制器与滞后时间削弱的自抗扰控制器的控制效果并未发生明显变化。
同样保持3种控制器参数不变, 在被控对象积分时间常数T增大10倍的基础上, 将滞后时间常数
 | 图5 滞后时间常数τ 增加20%系统阶跃响应Fig.5 Delay time constant increased by 20% |
从图5可以看出, PID结合Smith预估控制已经产生了明显的发散震荡, 而采用自抗扰控制理论的两种控制方法, 其控制效果仍然没有发生太大的变化, 表明采用自抗扰控制理论的两种系统具有非常高的鲁棒性, 即在模型不准确的情况下, 一旦调好了参数, 被控对象的积分时间常数与滞后时间常数在小范围变化不会太影响被控量的控制效果。
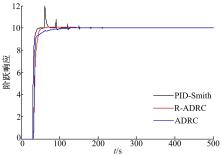
针对单一的自抗扰控制器与滞后时间削弱的自抗扰控制器, 在控制器参数不变的情况下, 在250 s时再接入一个幅值为0.2的阶跃扰动。控制效果如图6所示。可见, 在系统无外扰时输出可以很快地跟踪设定值, 扰动到来时两种方法的输出偏离设定值, 然后又很快恢复。时滞越大, 偏离设定值时间越长, 但之后都能逐渐恢复过来, 且滞后时间削弱的自抗扰控制器要比单一的自抗扰控制器恢复时间短。
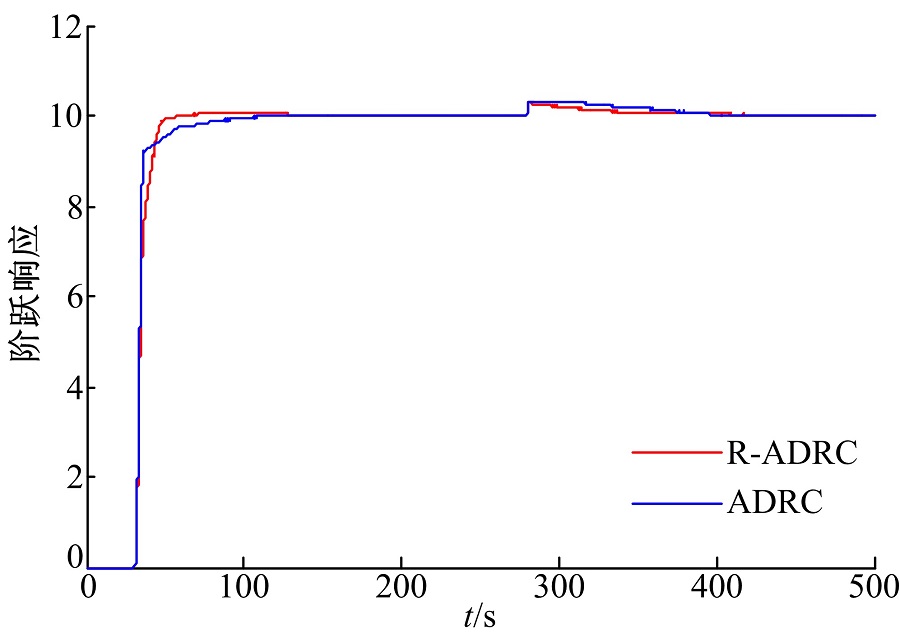 | 图6 扰动下系统的阶跃响应Fig.6 Unit step response with external disturbance |
研究滞后时间削弱的自抗扰控制方法在多种时滞下系统的控制性能。保持被控对象积分时间常数
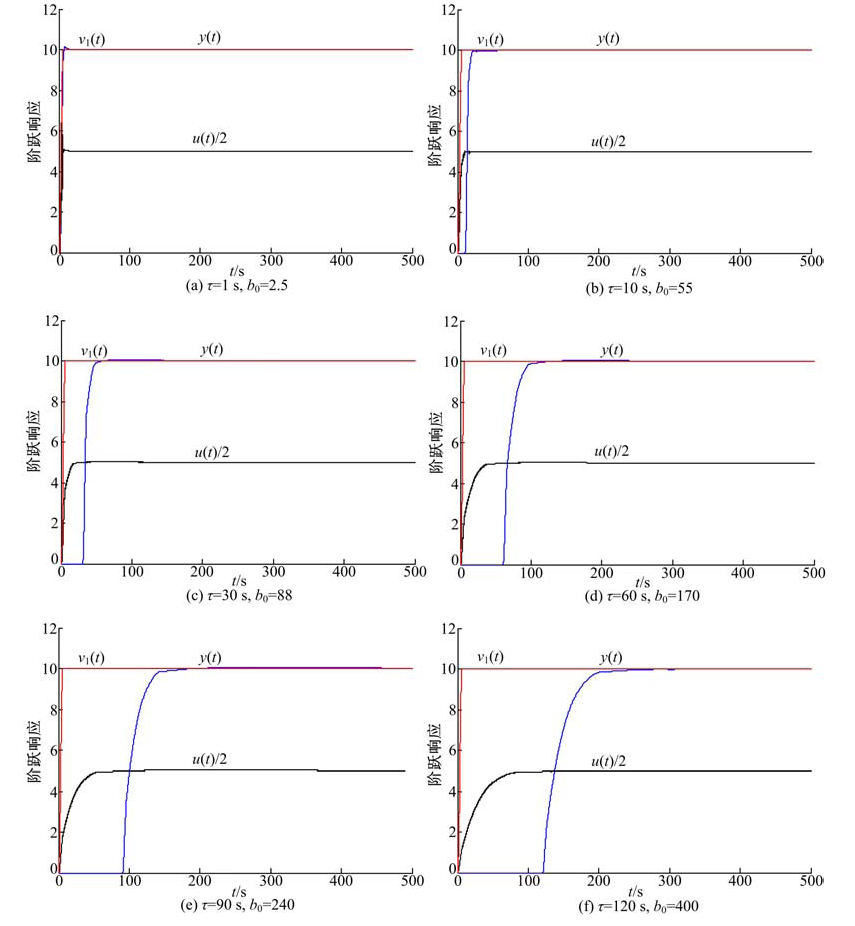 | 图7 多种时滞下系统的响应Fig.7 System responses with different delay time constant |
本文针对工业中常见的大滞后系统, 提出了一种滞后时间削弱的自抗扰控制方法。该方法首先通过滞后时间削弱理论将大滞后时间转化为小滞后时间, 然后采用自抗扰控制理论对转化后的小滞后对象进行控制。仿真结果表明, 该方法有效地消除了系统大滞后环节和参数不确定等因素对系统的影响, 克服了Smith预估算法等传统控制方法严重依赖于被控对象精确模型的缺点, 并改善了单一自抗扰控制器稳定时间长的问题, 使控制系统具有更好的动态性能、鲁棒性和抗干扰性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|