




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
雾霾天气低能见度对不同跟驰状态驾驶行为的影响
[高坤1, 2  , 涂辉招
, 涂辉招1, 2 , 时恒1, 2 , 李振飞3 ]
, 涂辉招|
|


作者简介:高坤(1993-),男,博士研究生.研究方向:交通行为分析与建模.E-mail:93gaokun@tongji.edu.cn
利用8自由度高逼真度驾驶模拟器,从工程学和人类心理学角度分析了雾霾天气低能见度对不同跟驰状态(加速、减速和平稳跟驰)驾驶行为的影响。结果表明:雾霾天气低能见度对不同跟驰状态驾驶行为的影响存在明显差异性。加速跟驰过程中,雾霾天气低能见度下驾驶员对速度差变化、距离差变化的反应敏感性和最大意愿加速度分别比晴天显著降低了29.3%、33.1%和17.4%,且驾驶行为异质性明显升高;减速跟驰过程中,雾霾天气低能见度下驾驶员对速度差变化的反应敏感性、最大意愿减速度和感知前车最大减速度分别比晴天显著提高了31.7%、17.8%和16.3%,对距离差变化的反应敏感性显著降低了32.1%,而驾驶行为异质性有所降低;平稳跟驰过程中,雾霾天气低能见度下驾驶员对速度差变化反应敏感性比晴天显著提高了41.6%,最大意愿加速度和减速度均值小于晴天,期望速度和对距离差变化的反应敏感性与晴天无显著差异。加减速反应阈值方面,驾驶员在雾霾天气低能见度下倾向于采取更加积极的加速反应来紧随前车,同时又更加谨慎地采取减速反应避免碰撞。本文研究结果为雾霾天气低能见度等紧急事件下应急疏散微观交通仿真的建立提供了理论支撑。
Using a high fidelity driving simulator with eight degrees of freedom, the effect of low visibility in haze weather condition on the driving behavior of three Car-Following (CF) stages (acceleration, deceleration and steady following stages) are analyzed from both engineering CF models and psychological-physiological CF model. The results show that the low visibility environment in haze weather condition has significantly different impacts on driving behavior of different CF stages. In acceleration CF stage, the drivers' sensitivity in changes of relative speed and spacing, as well as maximum desired acceleration under haze weather condition are significantly lower, 29.3%, 33.1% and 17.4% respectively, than that under clear weather condition. Meanwhile the heterogeneities in driving behavior are substantially larger in haze weather condition. In the deceleration stage, drivers' sensitivity in changes of relative speed, maximum desired deceleration and expected maximum deceleration of the leading vehicle under haze weather condition are significantly larger, 31.7%, 17.8% and 16.3% respectively, than that in clear weather condition. Whereas, the drivers' sensitivity in change of the spacing decreases by 32.1% in haze weather condition. In steady CF stage, the drivers have larger sensitivities in changes of relative speed, 41.6% higher in average in haze weather than that in clear weather, and have slightly smaller maximum desired acceleration and deceleration. However, there are no significant differences in desired speed and drivers' reaction to the change in spacing under different weather conditions. Moreover, the action points of acceleration and deceleration indicate that the drivers under low visibility in haze weather adopt quicker acceleration to follow the leading vehicle more closely, and are more cautious to take quicker braking action to avoid collision. The main findings of this paper provide references for setting-up of microscopic simulation for emergency traffic evacuation in case of low visibility in haze weather condition.
中国日益加重的环境污染导致了严重雾霾天气频发。雾霾天气下低能见度迫使管理者采用限速或关闭部分路段等措施来避免交通事故, 但同时也降低了交通运行效率、容易产生大规模拥堵和紧急事故[1]。由于紧急状况的突发性、危险性等特征, 应急交通疏散策略的制定主要借助交通仿真手段[2]。微观跟驰驾驶行为模型是微观交通仿真不可或缺的基础之一[3, 4]。雾霾天气低能见度应急微观交通仿真的可靠性和准确性, 很大程度上取决于对雾霾天气低能见度下微观驾驶行为规律的精确解析。根据考虑心理生理因素与否, 微观跟驰模型可分为两类[5]:工程学模型(如刺激反应模型[6]、安全模型[7]等)和人类心理学模型(如心理— 生理模型[8])。工程学模型主要基于物理性的刺激和反应理论, 试图描述驾驶行为的物理属性特征; 人类心理学模型则注重人为和心理因素对驾驶行为的影响。
针对低能见度对驾驶行为的影响国内外已有一定的研究, 但仍需要从工程学和人类心理学跟驰模型等方面进行更多的探索。Hawkins[9]指出部分驾驶员在能见度下降但高于150 m的雾霾环境中会保持比晴天更高车速, 但当能见度下降至100 m后会采取降速措施。White等[10]研究表明, 当能见度降低到200 m以下, 驾驶员会减少跟驰车头时距/间距; 在能见度为150 m时, 车辆保持2 s以内的车头时距的比例是晴天正常交通流的2.5倍。赵佳[11]的研究表明中国驾驶者在雾霾天气低能见度下会保持更小的车头间距。Saffarian等[12]研究了低能见度下驾驶员保持较小车头时距的原因, 并指出前车消失在视野中会让后车驾驶员产生危险感和过激的操作行为。Hogema等[13]分析了雾霾天气下的碰撞避险行为, 指出雾霾天气能见度降低导致驾驶员的视觉感知下降, 对突发状况的反应时间更长。闫学东等研究了雾霾天气低能见度对弯道驾驶行为[14]和避撞驾驶行为[15]的影响。Broughton等[16]采用驾驶模拟器研究在3种不同能见度和2种驾驶速度下的跟驰行为; 结果表明不同驾驶员的驾驶行为存在明显差异性, 部分驾驶员保证前车在视野内的跟驰状态而其他驾驶员则完全放弃跟驰。Hoogendoorn等[17]基于驾驶模拟器对比研究了低能见度下部分驾驶行为变量, 指出在低能见度下驾驶员会采取更小的自由流车速、加速度和减速度, 并且雾天低能见度会导致道路通行能力下降。Hoogendoorn等[18]研究了雾天低能见度对心理— 生理模型中反应点的影响, 结果显示低能见度下后车做出反应时的速度差和相对距离均一定程度大于晴天, 但并未区分加速反应点和减速反应点的差别。Hoogendoorn[19]进一步研究表明在后车驾驶员根据前车状态改变做出加减速反应时, 低能见度对前车速度与前后车速度差的关系存在影响。
驾驶员在不同跟驰状态的主要意图不同, 例如加速跟驰主要为紧跟前车, 减速跟驰主要为避免碰撞。雾霾天气低能见度对不同跟驰状态的驾驶行为的影响可能存在差异性。相关文献多数分析雾霾天气低能见度对整个跟驰过程的驾驶行为影响, 而未区分不同跟驰状态(加速、减速和平稳跟驰), 可能掩盖了雾霾天气低能见度对不同跟驰状态影响的差异性。另外, 工程学跟驰模型中的部分典型变量(例如对速度差和距离差变化的反应敏感性)以及人类心理学模型中加减速反应阈值受雾霾天气低能见度的影响也鲜有文献涉及。在数据采集方面, 大多研究采用固定底座模拟器, 其无法提供真实的驾驶受力和驾驶环境, 而研究[20, 21]表明:驾驶模拟器的受力感受和环境逼真度对驾驶行为存在较大影响, 高逼真驾驶模拟器能够提供更真实的实验场景。
本文利用8自由度高逼真驾驶模拟器构建晴天和雾霾天气低能见度两个场景, 从工程学跟驰模型和人类心理学模型两个角度研究分析了雾霾天气低能见度对3种不同跟驰状态(加速、减速和平稳跟驰)下驾驶行为的影响。工程学模型采用了经典的Helly模型[22]和GIPPS模型[7], 涵盖了速度差与距离差变化反应敏感性、最大意愿加速度、最大意愿减速度、期望速度、感知前车最大减速度等变量; 人类心理学模型则采用了Wiedemann提出的心理-生理模型[8]来研究雾霾天气低能见度对加速和减速反应阈值的影响。
试验使用8自由度的驾驶模拟器(图1)。该模拟器的驾驶模拟舱中放置了一辆完全真实的车辆, 该车配置真实的受力反馈系统(方向盘、油门、刹车)和高逼真显示系统(水平250° 、竖直40° 的环形屏幕, 刷新频率是60 Hz)。
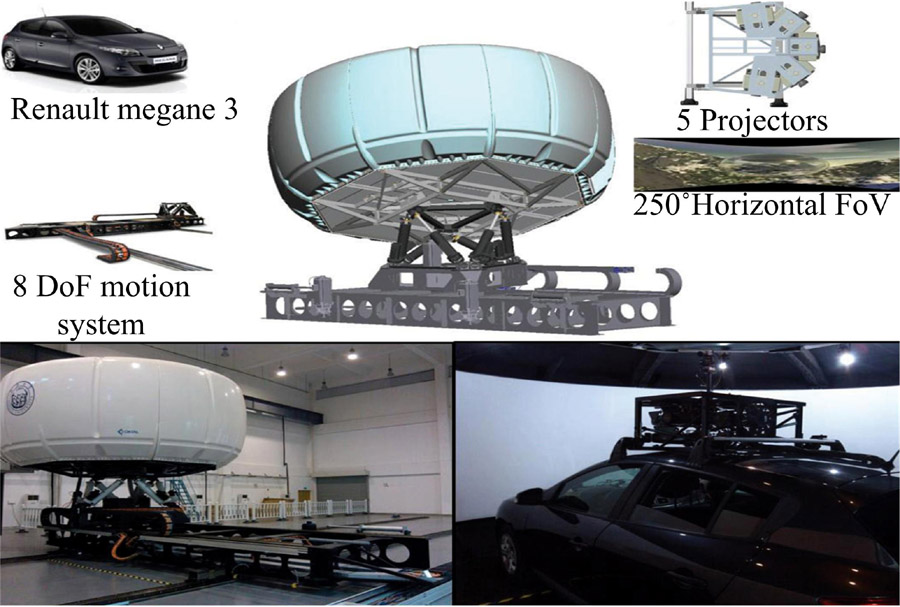 | 图1 高逼真度驾驶模拟器Fig.1 High fidelity driving simulator |
驾驶模拟器底座本身可沿x、y、z方向微量平移及以x、y、z为轴微量转动的6个自由度方向运动, 同时可以在横向5 m、纵向20 m的钢轨上自由移动, 构成8自由度运动体系。配套的SCANeRTM软件可以搭建实验场景和控制整个驾驶模拟器系统的运行[20, 21]。
试验场景包含晴天和雾霾天气低能见度两个场景。其中晴天能见度大于1000 m(见图2(a)), 雾霾天气的能见度根据浓雾能见度范围(50~200 m)设置为80 m来模拟雾霾天气低能见度(见图2(b))。由于驾驶模拟器中设置的能见度与实际不符,
 | 图2 试验场景示例Fig.2 Experimental scenarios |
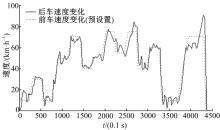
试验前进行了标定修正来确保场景中试验者的实际能见度为80 m。试验路段为有中央分隔带的双向4车道高速公路, 并设置了处于通畅行驶状态的背景交通流环境。前车轨迹根据实际预设置为纵向行驶不换道并包含若干个加速、减速和平稳3种跟驰状态, 试验者根据自己驾驶习惯跟驰前车, 每个场景实验时间约为6 min, 试验中前车和后车速度变化示例如图3所示。
 | 图3 试验中前车与后车速度变化Fig.3 Example of speed changes of lead vehicle and following vehicle |
试验过程流程如下:
(1)告知每位试验驾驶员应遵守的操作规范和驾驶模拟器操作流程。
(2)每位试验驾驶员分别在晴天和雾霾天气场景中驾驶3 min以熟练驾驶操作, 并观察驾驶员是否在实验过程产生不适反应。若一切正常, 休息5 min后开始正式试验。
(3)进行晴天场景下试验, 完成后休息5 min。
(4)进行雾霾天气场景下试验。
(5)对多名试验者重复上述试验过程。
驾驶模拟器数据采集系统以10 Hz频率自动记录试验数据。本研究主要记录的数据包括试验车辆和前车的速度、加速度、刹车板受力、油门受力、位移和相对距离等。试验中试验者对驾驶模拟器有良好的适用性并顺利完成试验。
本研究为探究雾霾天气低能见度对驾驶员跟驰行为的影响, 需要驾驶员一定程度具备稳定的驾驶心理和熟练的驾驶技能。试验样本招募了20名拥有驾驶证的合格试验者, 均具有丰富驾驶经验。试验者年龄范围为36~44岁, 平均年龄为39.8岁; 驾龄范围为6~13年, 平均驾龄为9.4年。每个试验者在每个试验场景的轨迹(见图3)中包括若干个加速、减速和平稳跟驰状态数据段。从每个试验者每个场景的轨迹中截取了3段加速跟驰段数据、3段减速跟驰段数据和3段平稳跟驰数据, 因此每种场景(晴雾天)下每个跟驰状态的样本量实际为60个(3× 20)。为保证每种跟驰状态的数据截取准确性, 采用人工选取。
1.4.1 工程学模型标定
工程学模型采用Helly[22]和GIPPS[7]模型, 表达式如式(1)(2)所示。两个模型中基本涵盖了主要的相关驾驶行为变量。
式中:
王殿海等[23]对跟驰模型的构建与参数标定方法进行了综述。本研究采用遗传算法进行跟驰模型的标定, 该启发式算法被Punzo等[24]证明能够有效进行跟驰模型的参数标定。标定过程实为最优化问题, 最优化目标为后车实际观测变量和模型仿真变量的差异最小。理论上速度、速度差和车头间距等均可作为观测变量, Kesting等[25]研究表明车头间距作为观测变量最适用于连续轨迹的跟驰模型标定。参考文献[26]采用RMSPE(Root mean squared percent error)作为拟合优度指标:
式中:
参考已有研究综述[5, 27]并保持尽可能大的范围, 标定参数的设置范围如表1所示。采用Matlab的遗传算法工具箱进行相应的标定, 为让遗传算法达到较优结果设置每次标定过程最少迭代300次后才停止。由于遗传算法的随机性, 每次计算结果存在轻微差异性, 因此每次标定过程重复10次并选取拟合优度指标最小的结果。
| 表1 跟驰模型标定参数汇总 Table 1 Overviews of calibrated parameters of car-following models |
1.4.2 加减速反应点判定
Wiedemann[8]提出的生理-心理模型中加减速反应点(阈值)是指后车根据前车状态变化做出加速或减速反应时, 前、后车的速度差与距离差关系。减速反应点的选取原则是前、后车的相对速度与距离差距离差持续减小, 转变为相对距离持续减小而相对速度开始增加的时刻; 加速反应点的选取原则是前、后车的相对速度与距离差持续增加, 转变为距离差持续增加而相对速度开始减小的时刻[28]。后车做出加减速反应并不一定为受前车影响, 例如前、后车距离差远超过稳定跟驰车头间距范围时, 加减速为自由驾驶行为而非跟驰行为。因此, 只有距离差在相应的合理跟驰距离范围内的数据被用于反应阈值的选取。不同速度下的合理跟驰距离的范围参考文献[29]。
1.4.3 统计对比分析
由于驾驶员行为的异质性, 跟驰模型中的参数或变量不应是一个常数值而应该是随机变量。在对不同能见度下驾驶变量进行对比时, 即采用常规的参数检验来对比参数均值的差异性, 也采用非参数检验Kolmogorov-Smirnov(KS)检验来对比参数分布的差异。其中参数检验采用
在加速跟驰过程中, 主要关注的驾驶行为变量包含对速度差和距离差变化反应敏感性
| 表2 能见度对加速跟驰过程主要变量的影响 Table 2 Effects of visibility on variables in case of acceleration car-following stage |
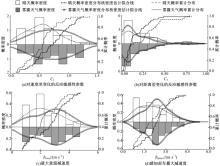
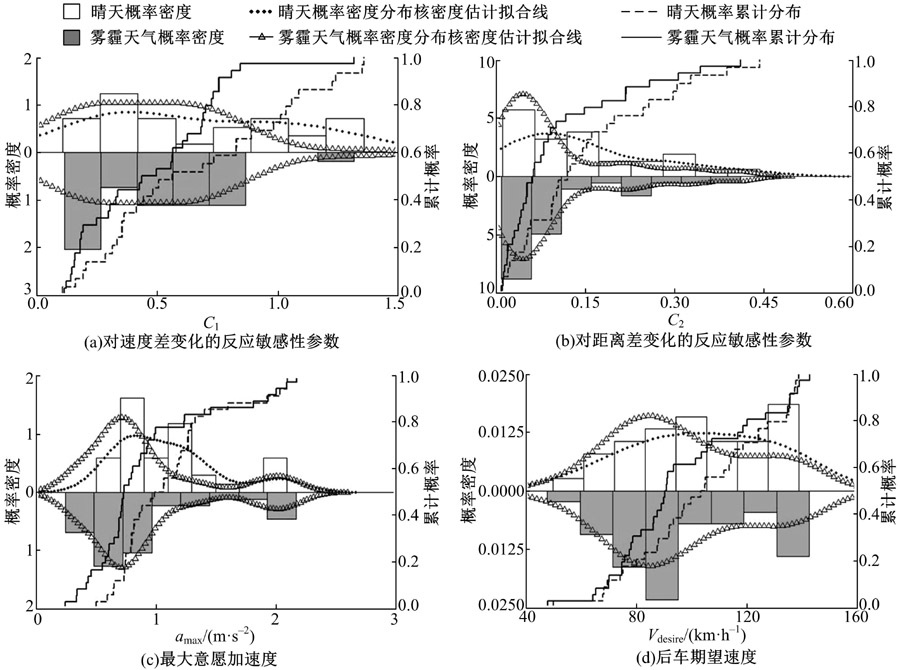 | 图4 晴天与雾霾天气下加速跟驰驾驶行为变量对比结果Fig.4 Comparisons of acceleration following variables under clear and haze weather |
由图4可知, 在雾霾天气下驾驶员对速度差、距离差变化的反应敏感性
在减速跟驰过程中, 主要关注的变量包含对速度差和距离差变化的反应敏感性参数
雾霾天气低能见度下驾驶员对速度差变化反应敏感性
| 表3 能见度对减速跟驰过程主要变量的影响 Table 3 Effects of visibility on variables in case of deceleration car-following |
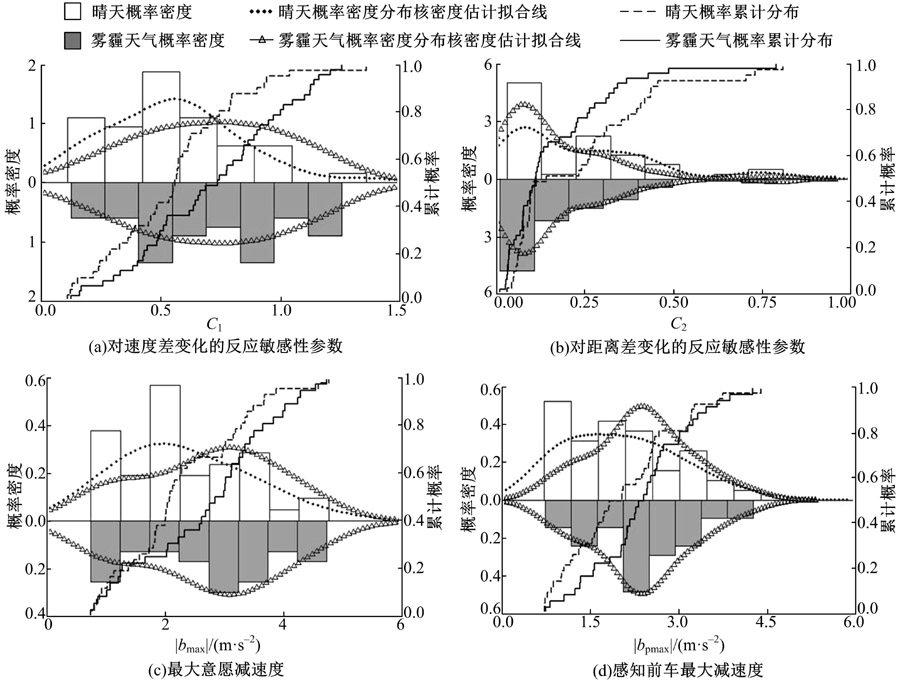 | 图5 晴天与雾霾天气下减速跟驰驾驶行为变量对比结果Fig.5 Comparisons of deceleration following variables under clear and haze weather |
表4和图6为平稳跟驰过程的分析结果。
平稳跟驰过程中, 雾霾天气下对速度差变化敏感性
| 表4 能见度对平稳跟驰过程主要变量的影响 Table 4 Effects of visibility on variables in case of steady car-following |
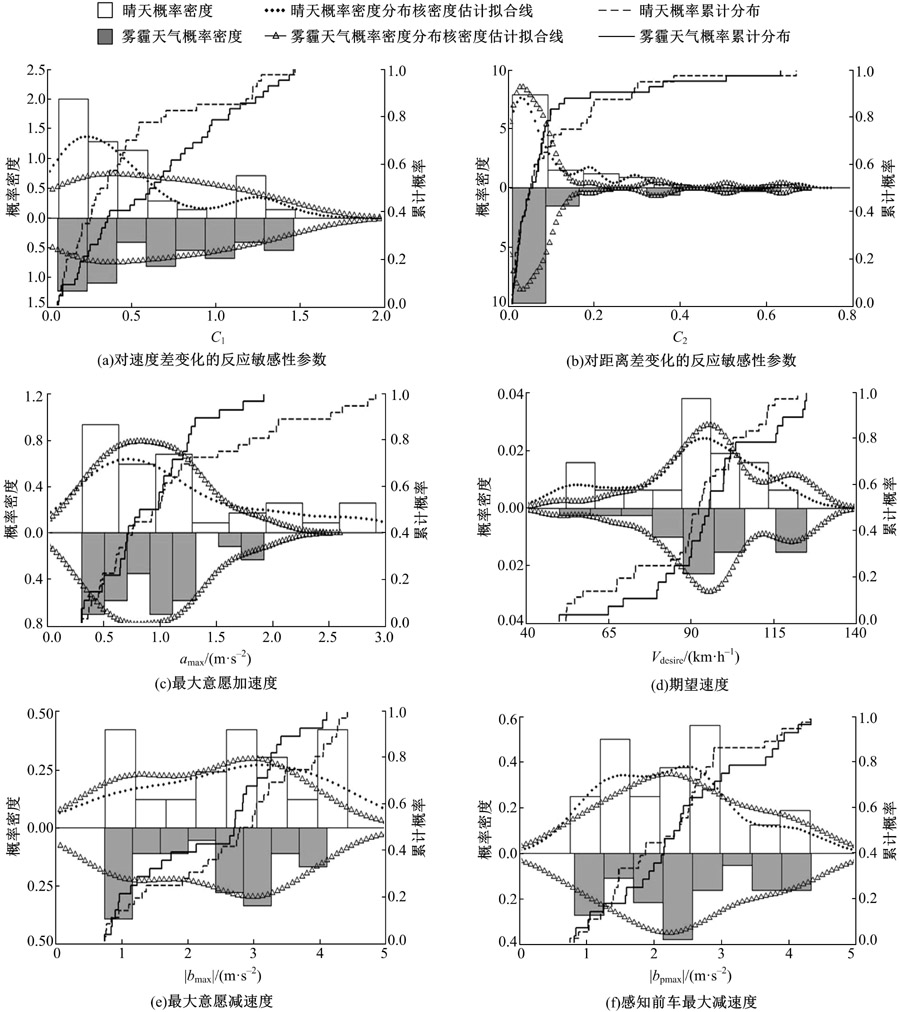 | 图6 晴天与雾霾天气下平稳跟驰驾驶行为变量对比结果Fig.6 Comparisons of steady following variables under clear and haze weather |
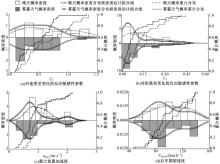
图7(a)显示了晴天和雾霾天气低能见度下加速反应点的分布。图中反应点呈现出较大的离散性, 原因之一是驾驶员驾驶行为的异质性, 另一原因是加减速的反应决策并不仅仅受速度差和距离差两个因素影响。采用指数函数曲线拟合, 雾霾天气下的反应阈值曲线明显低于晴天。图7(b)和图7(c)分别显示了加速反应点的距离差
图8(a)显示了晴天与雾霾天气低能见度下减速反应点的分布。指数函数拟合结果显示雾霾天气下的反应阈值曲线高于晴天。图8(b)显示了减速反应点速度差
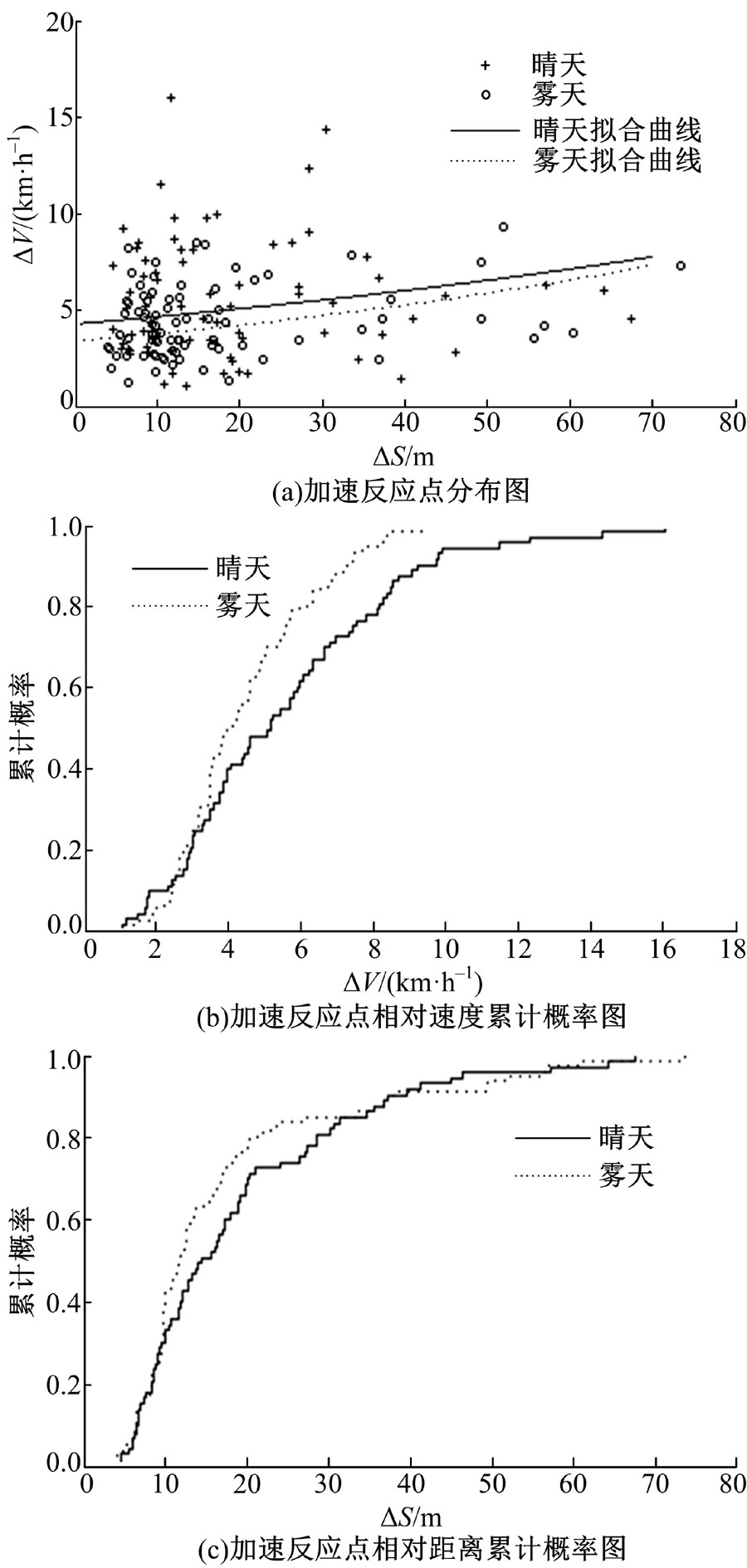 | 图7 晴天和雾霾天气下加速反应点对比分析结果Fig.7 Comparisons of acceleration action points under clear and hazy weathers |
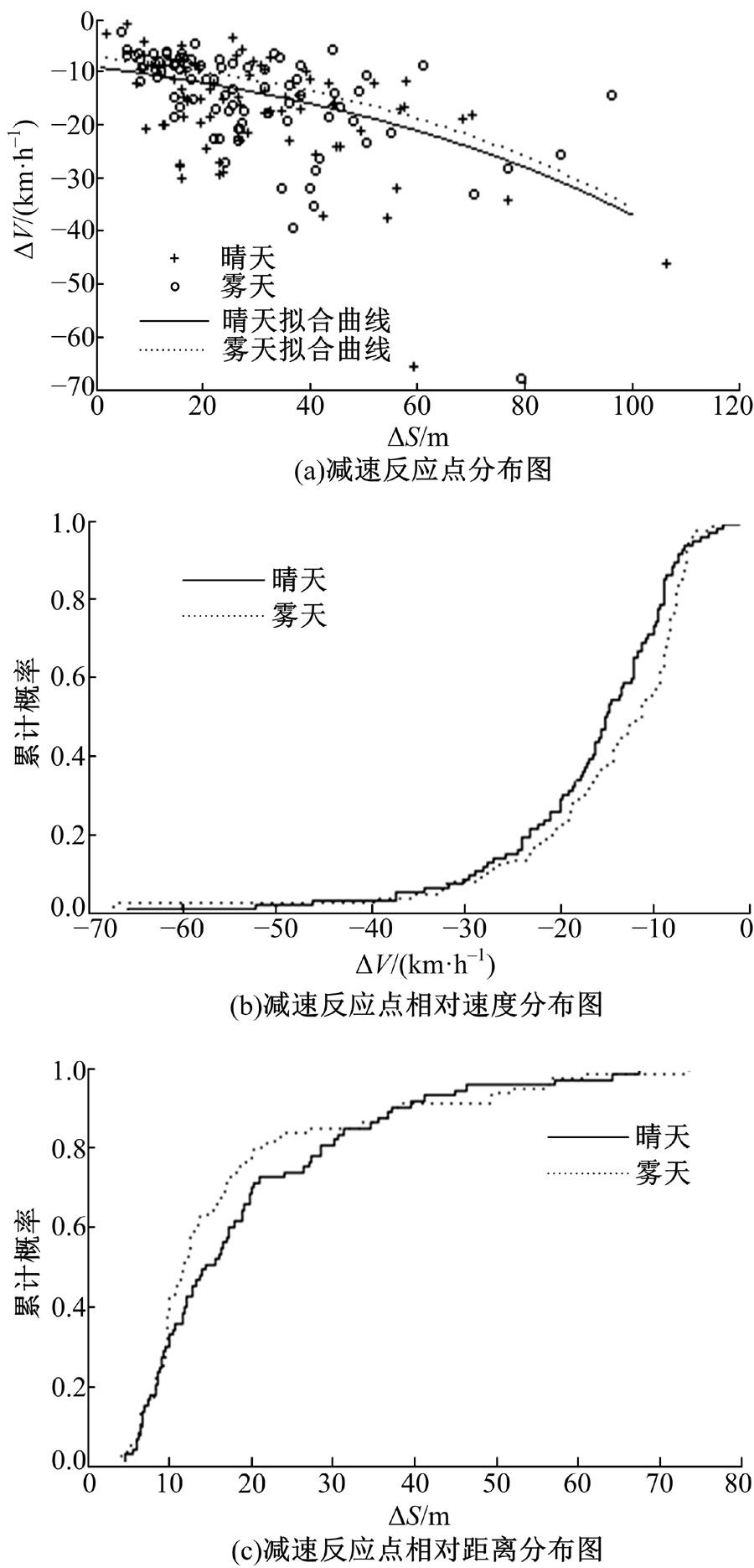 | 图8 晴天和雾霾天气下减速反应点对比分析结果Fig.8 Comparisons of deceleration action points under clear and hazy weathers |
雾霾天气低能见度环境使驾驶员视觉敏感性降低且增加了驾驶员心理上的危险感, 同时驾驶员在低能见度下倾向于保持较小的跟驰车头间距[10, 11, 12]。因此在加速跟驰过程中, 当感知到与前车的速度差或距离差变化时, 相对于晴天驾驶员会采取较小的加速反应, 意愿最大加速度和期望速度。因为同样的原因, 在减速跟驰过程中驾驶员在雾霾天气低能见度下对速度差的变化会采取更大的减速反应来避免碰撞, 而视觉感知的下降导致了驾驶员对车头间距变化的敏感性下降, 迫使驾驶员更加谨慎地驾驶(预估前车会有更大的减速度), 并采用更大的最大意愿减速度来避免碰撞。平稳跟驰过程中, 由于雾霾天气低能见度下驾驶员倾向于保持比晴天更小的车头间距, 在感知到速度差变化时, 驾驶员在会更加积极做出加速或减速反应来保证紧随前车又避免碰撞, 并倾向于较小的最大加速度和减速度。
加减速反应点的结果表明:驾驶员在雾霾天气下, 会更加积极地做出加速反应以保证能够紧随前车(较小的距离差和速度差下加速), 同时会谨慎地采取减速反应来避免与前车发生碰撞(较小的速度差下减速)。其原因是雾霾天气低能见度下驾驶员倾向于保持较小的跟驰车头间距[10, 11, 12], 驾驶员采取加减速反应主要根据前车在视野中的视角变化(与速度差/距离差的平方成比例)达到阈值。在较小的稳定车头间距下, 触发加减速反应视角变化率阈值时速度差也较小。同时驾驶员害怕前车消失在视野带来的不确定感[12]和较小车头间距下的碰撞危险, 因此会采取更加积极的加减速反应紧随前车又避免碰撞。
研究结果表明, 雾霾天气低能见度对不同跟驰状态下某些驾驶变量的影响规律并不一致:①驾驶员对速度差变化的反应敏感性变量
(1)雾霾天气低能见度对不同跟驰状态的驾驶行为影响规律并不一致且存在明显差异性, 在进行雾霾天气下微观驾驶行为仿真时应该充分考虑该差异性。
(2)加速跟驰状态:雾霾天气低能见度下, 驾驶员对速度差、距离差变化的反应敏感性和最大意愿加速度均显著小于晴天; 期望速度的分布显示雾霾天气下驾驶员的期望速度更小; 驾驶员的行为异质性高于晴天。
(3)减速跟驰状态:雾霾天气低能见度下, 驾驶员对速度差变化的反应敏感性、最大意愿减速度、感知前车最大减速度均显著大于晴天; 对距离差变化的反应敏感性显著小于晴天; 驾驶员行为异质性普遍低于晴天。
(4)平稳跟驰状态:雾霾天气低能见度下, 驾驶员对速度差变化反应敏感性显著大于晴天; 最大意愿加速度和减速度均值小于晴天; 对距离差变化的反应敏感性和感知前车最大减速度与晴天无显著差异。
(5)反应阈值:雾霾天气低能见度下, 驾驶员会更加积极地做出加速反应以保证能够紧随前车(较小的距离差和速度差下加速), 同时会谨慎地采取减速反应来避免与前车发生碰撞(较小的速度差下减速)。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|