






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于强跟踪卡尔曼滤波的陀螺信号处理
[朱枫1, 2, 3  , 张葆
, 张葆1, 2 , 李贤涛1, 2 , 王正玺1, 2, 3 , 张士涛1, 2, 3 ]
, 张葆, 李贤涛|
|


作者简介:朱枫(1992-),女,博士研究生.研究方向:航空光电稳定平台视轴稳定技术.E-mail:zf0109@126.com
针对陀螺传感器测量精度低,严重影响航空光电稳定平台视轴稳定精度的问题,设计了强跟踪卡尔曼滤波器。根据时间序列分析法的基本原理,对经过预处理的陀螺原始量测数据进行AR模型建模,根据该AR模型采用状态空间法设计卡尔曼滤波器,同时为了增强系统的鲁棒性,引入强跟踪算法对卡尔曼滤波中的状态预测方差进行实时调整,构造了强跟踪卡尔曼滤波器。阐述了该算法的理论、原理,并且在某型航空光电稳定平台上进行试验验证。试验结果表明:强跟踪卡尔曼滤波器输出信号的方差减少了44.1%,分散程度降低,同时,相较于巴特沃斯滤波器,最大超调量减少13%,上升时间缩短了3 ms,调整时间缩短了37.5 ms,使平台具有良好的动态性能。研究表明,强跟踪卡尔曼滤波器可以提高航空光电稳定平台的精度,有较高的实用价值。
To overcome the problem that the low measuring precision of the gyroscope leads to degradation of Line of Sight (LOS) stabilization accuracy of photoelectric stabilized platform for aviation, a strong tracking Kalman filter was designed. According to the principle of the time sequence analysis from the random series, Autoregressive method (AR) was adopted to model the preprocessed data measured by the gyroscope. The state-space method was used to design the Kalman filter. In the meantime, in order to increase the control system's robustness, the strong tracking algorithm was introduced to correct the variance of state prediction in real time to construct the strong tracking Kalman filter. The theory and principle of the algorithm were described and applied to the photoelectric stabilized platform for aviation. The results show that the variance of signal was reduced by 44.1% after filtering using the strong tracking Kalman filter, and the dispersion was apparently reduced. At the same time, comparing with the Butterworth filter, the strong tracking Kalman filter shortens the overshoot by 13%, cut down the rise time by 3 ms, shortens the regulation time by 37.5 ms, keeps the platform in good dynamic properties. The study indicated that the strong tracking Kalman filter has strong application value.
高精度的航空光电稳定平台是由多级框架、光电红外系统以及激光瞄准系统组成的综合航空遥感器[1], 其主要作用是隔离载体的扰动, 使航空光电稳定平台的视轴能够迅速、平稳地跟踪和侦察靶标, 实现激光功率即使通过长距离传输后仍能集中在靶标上[2]。航空光电稳定平台具有较好的机动性、鲁棒性以及实时性等特点, 从而被广泛应用于地质测绘、军事侦察、军事打击引导等多个领域。
陀螺是航空光电稳定平台伺服控制系统的核心敏感传感器[3], 伺服控制系统利用陀螺传感器敏感平台的角速度信号, 进而驱动电机反向运动补偿该角速度, 从而保持惯性空间的稳定。因此, 陀螺传感器的测量精度直接影响航空光电稳定平台的视轴稳定精度。但是受陀螺传感器自身、半导体热噪声、电磁干扰等影响[4], 使得陀螺的输出数据不可避免地含有随机噪声。为保证平台对目标的精准追踪, 需要对陀螺信号进行滤波处理, 进而抑制随机噪声对视轴稳定的不利影响。目前工程上多应用二阶或高阶巴特沃斯滤波器, 这种方法虽然可以在高频信号方面有效地抑制随机噪声, 但是会在陀螺的低频信号区域产生相位延迟, 影响陀螺信号的准确性和实时性。
1960年卡尔曼滤波理论[5]以其具有实时递推、存储量小和简单易行的特点被广泛地应用于各大领域。标准卡尔曼滤波算法假设系统为随机线性系统, 需要精确的系统模型参数。但是, 在实际的工程应用中, 对系统模型无法精确测量, 存在一定范围的摄动, 这时应用标准卡尔曼滤波器会导致滤波性能变坏甚至发散[6]。为了提高算法对系统误差的鲁棒性, 本文采用强跟踪算法[7]对卡尔曼滤波算法中的状态预测方差进行实时修正, 提高系统在有不确定性情况下对状态估计的精度, 进而提高传感器的测量精度, 增强控制系统的性能。
本文从工程应用的角度出发, 利用时间序列分析法对陀螺信号进行建模分析, 根据状态空间法为系统建立状态方程和量测方程。在标准卡尔曼滤波的基础上, 引入强跟踪因子, 构建了强跟踪卡尔曼滤波器, 对随机噪声进行滤波处理, 从而提高了视轴稳定精度, 优化了控制系统的性能。
陀螺噪声随机过程是各态历经的随机过程, 因此要对噪声特性进行分析, 必须对其进行快速傅里叶变换得到其功率谱, 随后根据噪声频率域的分布情况对输入信号进行滤波。
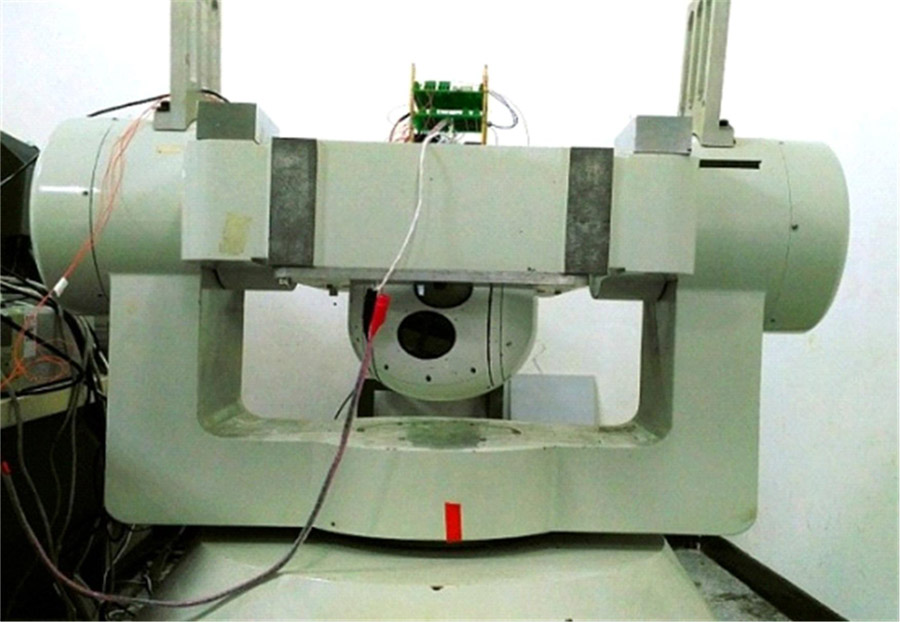
试验所选用的陀螺型号为qrs14, 具体形态如图1所示。
 | 图1 qrs14陀螺传感器Fig.1 Gyroscope of qrs14 |
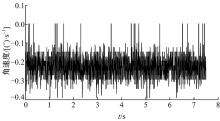
在恒温条件下, 对陀螺的静态角速率输出进行采集, 外部平台输入量为零, 此时陀螺的期望输出值为零, 所得数据即为该陀螺的零位噪声, 如图2所示。
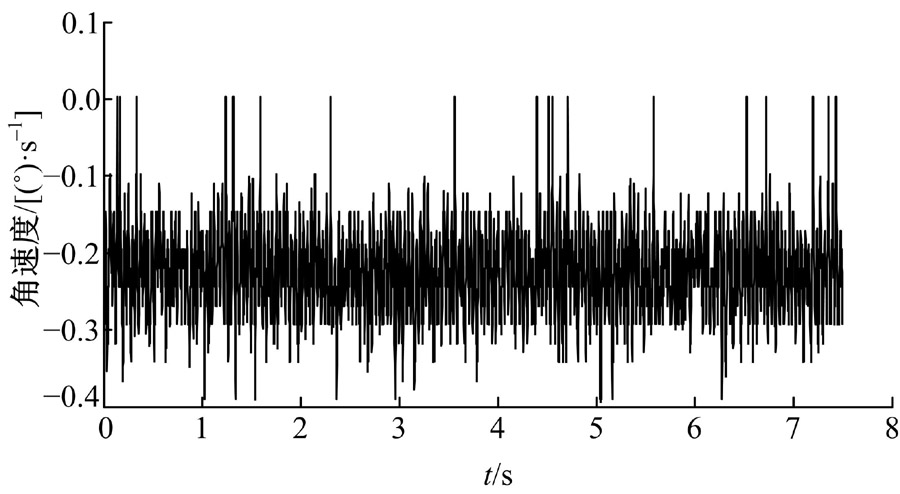 | 图2 陀螺的零位噪声Fig.2 Zero noise of gyroscope |
通过对多组压电陀螺零位噪声进行分析, 去掉对应陀螺偏置的直流分量后, 对该噪声序列进行快速傅里叶变换(FFT)得到功率谱密度, 如图3所示。
 | 图3 零位噪声的功率谱Fig.3 Power spectrum of zero noise |
分析功率谱可知, 陀螺噪声功率谱密度值在低频部分最为显著, 如果采用一阶巴特沃斯滤波或者滑动平均法滤波, 只能抑制噪声的高频部分, 对陀螺噪声不能起到较好的消除作用。而若采用二阶或更高阶巴特沃斯滤波器, 虽然去噪效果很好, 但是会引起相位延迟, 影响信号的实时性和准确性, 进而影响伺服系统的控制性能。
时间序列分析[8]是对有序的随机序列进行分析、处理, 根据系统的输出数据推测系统内部时性和外部的影响, 同时预测系统的未来状况。时间序列信号模型是一个线性模型, 具有连续功率谱的特性。许多平稳随机序列都可以看成是由典型噪声源激励一个线性系统产生的, 这种噪声源一般是白噪声序列。在实际应用中, 根据陀螺随机漂移特性对输出信号进行建模, 利用白噪声驱动下自回归(AR)模型的线性组合, 对陀螺输出的随机信号进行拟合。通过使用不同阶次的线性模型, 以及对信号的总体考虑, 在时域上对陀螺信号进行建模, 其建模结果可为卡尔曼滤波中状态矩阵的参数设置提供参考。
时间序列法的基本模型为自回归滑动平均模型, 即ARMA(p, q)模型[9], 其一般形式为:
式中:
当
当
由于时间序列法要求数据为零均值平稳随机序列, 所以需要对采集的零位噪声进行数据预处理[10]。
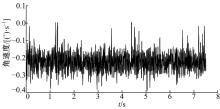
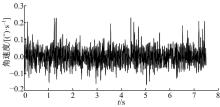
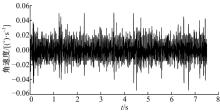
首先对数据进行平滑处理, 去除明显异常的野值, 如图4所示。再去除趋势项, 使数据的均值为零, 如图5所示。最后, 为了保证数据的平稳性, 进行一阶差分处理, 如图6所示。
 | 图4 平滑处理后的信号Fig.4 Signal after smoothing |
 | 图5 去除趋势项后的信号Fig.5 Signal after subtracting the mean value from data |
 | 图6 一阶差分的信号Fig.6 First order difference signal |
处理后的数据可以根据时间序列分析法构建传感器的数学模型。
由于陀螺的模型阶次都比较低, 一般不超过二到三阶, 并且, 在实际应用工程应用中, ARMA模型的自回归阶数大于或等于滑动平均阶数[11], 所以陀螺模型一般选为AR(1)、AR(2)、AR(3)、ARMA(1, 1)、ARMA(2, 1)。
对于随机序列模型阶次的选择通常采用FPE准则, 具体公式为:
式中:
各模型参数及其FPE值如表1所示。
| 表1 模型参数及其FPE值 Table 1 Mathematic models’ parameters and values of FPE |
通过对比表1中各模型的FPE值可以看出, 5个模型的FPE值都很小并且相差不大。考虑到后续计算的复杂程度以及算法的运行效率, 本文选用AR(1)模型构建陀螺方程:
此方程可为卡尔曼滤波的状态方程的参数设定提供参考。
根据式(5)构造卡尔曼滤波系统的状态方程和观测方程[12]:
式中:
关于系统过程噪声和观测噪声的统计特性, 假定如下:
式中:
卡尔曼滤波递推公式如下所示。
状态一步预测:
一步预测误差方差矩阵为:
滤波增益矩阵为:
估计误差方差矩阵为:
状态估计为:
标准卡尔曼滤波需要明确系统模型, 但是由于系统模型的简化、噪声统计特性不准确以及实际系统的参数发生变动等原因, 使得系统模型存在大量的不确定性, 即所建立的系统模型与其所描述的系统不匹配。
针对上述原因, 为了提高系统的鲁棒性, 采用强跟踪滤波算法, 利用衰减记忆滤波思想, 将渐消因子引入状态预测误差协方差阵[13], 从而实时调整滤波增益矩阵, 强迫滤波残差序列保持相互正交, 使得强跟踪滤波器保持对系统实际状态的跟踪[14, 15]。
利用时变渐消因子对过去的数据进行渐消, 减弱陈旧数据对当前滤波值的影响, 通过实时调整预测误差的协方差矩阵以及相应的增益矩阵来增强滤波器对状态突变的跟踪能力。在标准卡尔曼滤波算法的基础上按照强跟踪滤波算法在计算状态预测方差
式中:
式中:
为了验证在实际工程中跟踪微分器的滤波效果, 在某型航空光电稳定平台上进行试验。试验环境如图7所示, 为某型航空光电稳定平台和用于模拟飞机飞行中姿态变化的模拟转台。
 | 图7 航空光电稳定平台和飞行模拟转台Fig.7 Aerial photoelectrical stabilized platform and swing table |
伺服系统速度环的带宽为15 Hz, 为了保持平台控制系统的稳定性, 滤波器的带宽应大于速度环带宽, 从而保持一定的相位裕度和幅值裕度。
图8为二阶巴特沃斯滤波器和强跟踪卡尔曼滤波器的频率响应Bode图。
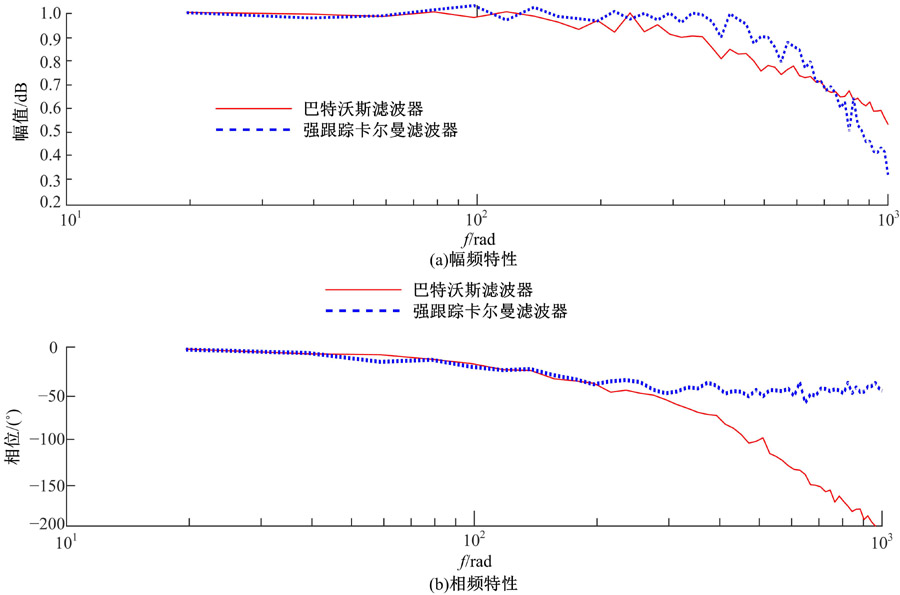 | 图8 巴特沃斯滤波器和强跟踪卡尔曼滤波器的Bode图Fig.8 Bode of Butterworth filter and strong tracking Kalman filter |
从图8中可以看出, 两个滤波器均在300 rad前后开始幅值衰减, 但是强跟踪卡尔曼滤波器没有带来相位的损失, 明显优于二阶巴特沃斯滤波器, 能够满足控制系统对滤波器的带宽要求。
将采集到的陀螺零位噪声数据分别用二阶巴特沃斯滤波器、卡尔曼滤波器和强跟踪卡尔曼滤波器进行滤波处理, 如图9所示。滤波前、后的信号均值和方差如表2所示。
从图9中可以看出, 经过强跟踪卡尔曼滤波器, 陀螺零位输出信号的方差减少了44.1%, 分散程度显著降低, 可见强跟踪卡尔曼滤波器对于陀螺的零位噪声抑制效果最好。
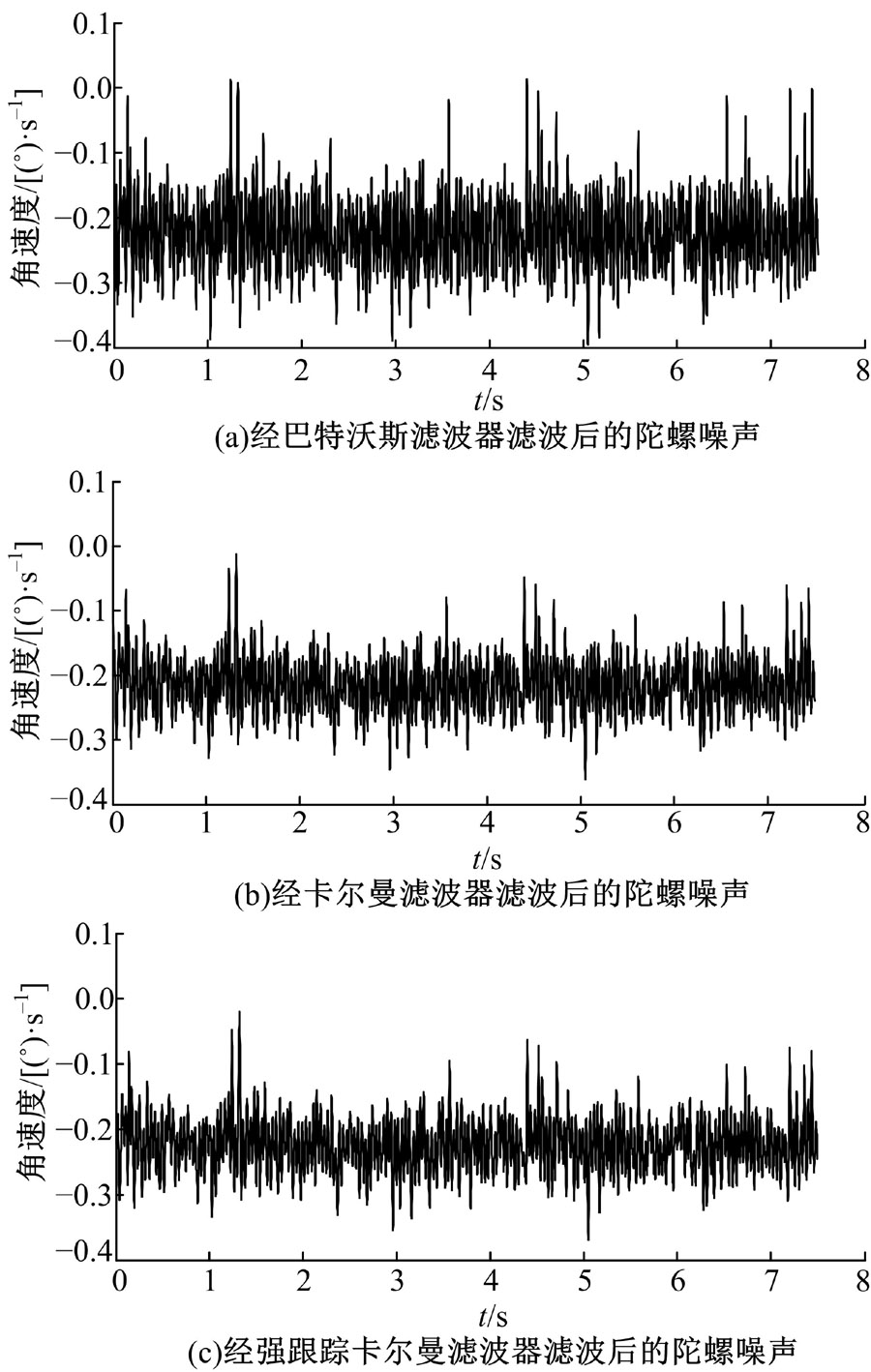 | 图9 三种滤波方法的阶跃响应曲线对比Fig.9 Contrast of three kinds of filter’ s step response of platform |
| 表2 陀螺信号的均值和方差 Table 2 Mean value and variance deviation of Gyro signal |
在平台中给定恒定的速度输入值为10° /s, 分别在二阶巴特沃斯滤波器、卡尔曼滤波器、强跟踪卡尔曼滤波器下进行阶跃响应试验, 观察系统的动态性能, 曲线如图10所示。
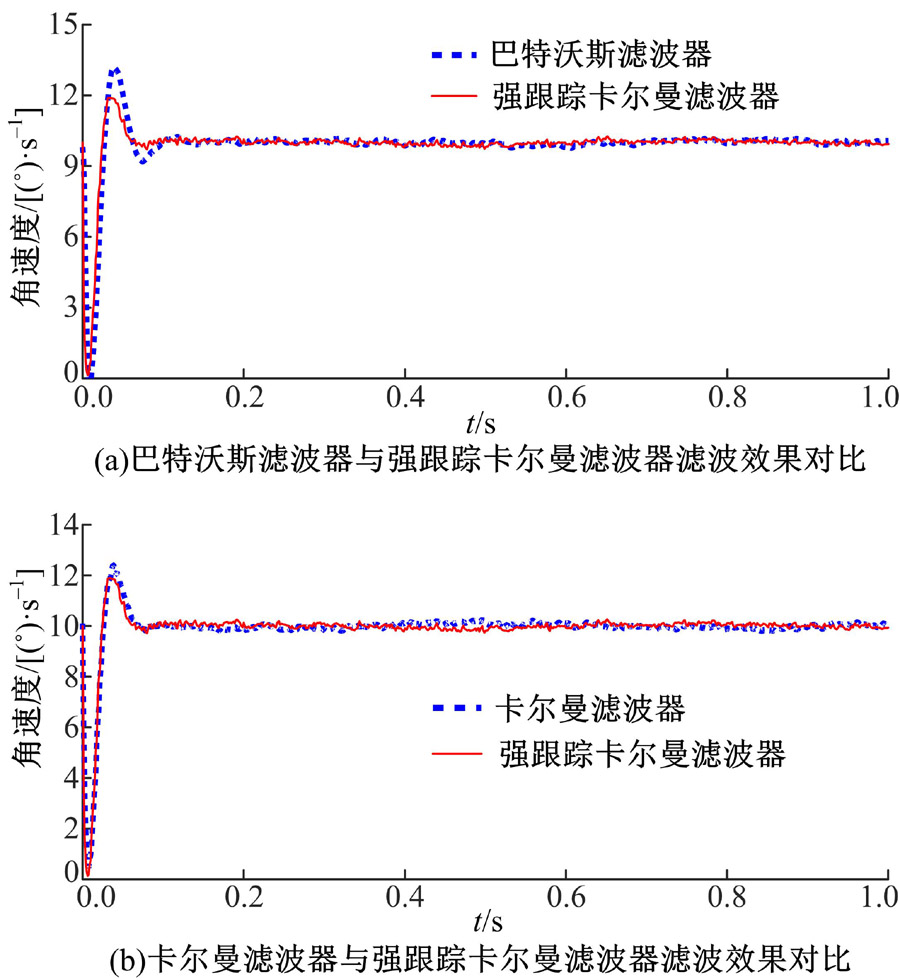 | 图10 三种滤波方法的阶跃响应曲线对比Fig.10 Contrast of three kinds of filter’ s step response of platform |
通过观察3种阶跃响应曲线可知, 强跟踪卡尔曼滤波器控制下的伺服系统的动态特性得到优化, 波动小、平稳性好, 最大超调量减少13%, 上升时间缩短了3 ms, 调整时间缩短了37.5 ms。这充分说明了在强跟踪卡尔曼滤波器控制下的系统响应速度快、调节时间短, 有效提升了控制系统的动态性能。
设置平台的转动速度为一个正弦信号, 幅值为15° /s, 频率为10 Hz。分别观察在二阶巴特沃斯滤波器和强跟踪卡尔曼滤波器控制下的系统输出曲线, 结果如图11所示。
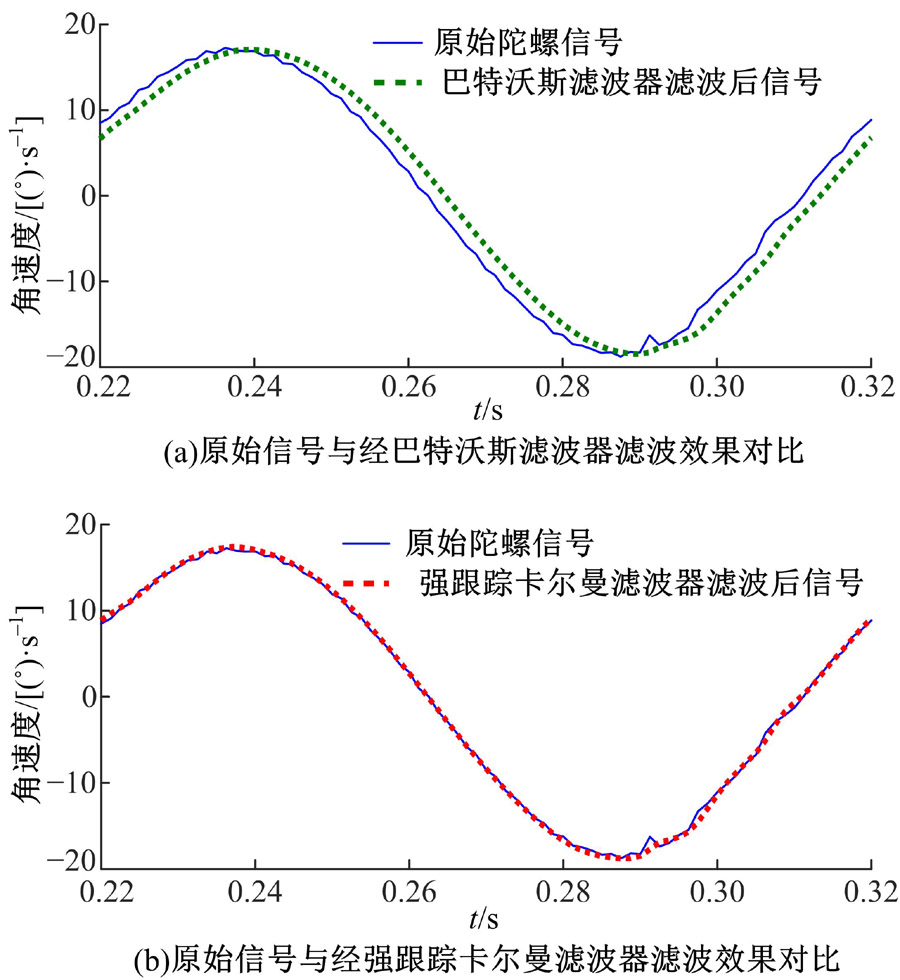 | 图11 两种滤波方法的正弦曲线对比Fig.11 Contrast of two kinds of filter’ s sine wave |
从图11可以看出:相较于原始陀螺信号, 两个滤波器都有很好的滤波效果。但是二阶巴特沃斯滤波器的相位略有滞后, 而强跟踪卡尔曼滤波器很好地保证了信号的实时性, 几乎没有相位损失, 良好地保持了系统的控制性能。
在同样的试验环境下, 针对同一个陀螺传感器, 验证对系统的模型参数估计存在误差时系统的鲁棒性。将系统模型参数分别增大和减小10%, 即状态参数分别为0.9182和0.7512。在这两种情况下分别用卡尔曼滤波器和强跟踪卡尔曼滤波器对陀螺传感器进行滤波。表3为状态参数为0.9182时卡尔曼滤波器和强跟踪卡尔曼滤波器对陀螺的零位噪声的滤波效果。表4为状态参数为0.7512时卡尔曼滤波器和强跟踪卡尔曼滤波器对陀螺的零位噪声的滤波效果。
| 表3 参数为0.9182时信号的均值和方差 Table 3 Mean value and Variance deviation of Gyro signal when parameter increased to 0.9182 |
| 表4 参数为0.7512时信号的均值和方差 Table 4 Mean value and Variance deviation of Gyro signal when parameter decreased to 0.7512 |
通过观察表3和表4中数据可以看出:当系统的模型参数存在一定范围的摄动, 带有误差时, 强跟踪卡尔曼滤波器依旧可以保持对噪声较强的抑制能力, 提高传感器信号的精度, 使系统具有较强的鲁棒性。
针对陀螺传感器测量精度低的实际工程问题, 本文提出了强跟踪卡尔曼滤波器, 摒弃了传统的巴特沃斯滤波器, 以改善相位延迟问题。利用时间序列法为传感器构建状态方程, 在传统卡尔曼滤波理论的基础上, 引入了强跟踪算法, 构建了强跟踪卡尔曼滤波器。试验结果表明, 对比滤波前、后的信号方差, 经过强跟踪卡尔曼滤波器输出的信号方差降低了44.1%。对于阶跃响应, 系统的最大超调量减少了13%, 调整时间缩短了37.5 ms, 显著地提升了平台的动态响应性能。当系统模型参数存在一定范围的摄动时, 强跟踪卡尔曼滤波器保持了信号的高精度, 同时还具备标准卡尔曼滤波器所欠缺的鲁棒性。综上所述, 本文所设计的强跟踪卡尔曼滤波器, 有较好的实用性和较高的工程应用价值, 具有广阔的应用前景。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|