{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
具有仿生距下关节和跖趾关节的完全被动步行机
[钱志辉1  , 周亮
, 周亮1 , 任雷1, 2 , 任露泉1 ]
, 周亮, 任露泉|
|


作者简介:钱志辉(1981-),男,副教授,博士.研究方向:生物运动力学与工程仿生.E-mail:zhqian@jlu.edu.cn
以人体足部关节为仿生模本,研制了具有仿生距下关节(矢状面内关节轴倾角为45°)和跖趾关节(添加脚趾)的新型完全被动步行机,并实现了稳态行走。通过单因素试验确定了步行机的最佳高度;采用多因素混合正交试验设计,分析了步行机高度、有无足趾、腿间距3个因素对步行机行走性能的影响。结果表明:研究范围内,对步行机行走性能(稳定行走距离和行走速度)影响最大的因素为腿间距;足部有、无脚趾对行走速度具有次要影响,而步行机高度则对行走最大距离具有次要影响。
Based on anatomical configuration of human foot joints, a completely passive walking machine was developed with bionic subtalar joint (the joint axis of the sagittal plane is 45 degrees) and matatarsal phalangeal joint (add toe), realizing stable walking on slope. The optimum height of the walking machine was determined by single factor measurement. The influences of three factors, the height, the distance between two legs and toes or without toes of the walking machine, on the stable walking performance of the walking machine were analyzed by using multi-factor mixed-level orthogonal test design. Within the scope of the study, the distance between two legs played the most significant role on the walking performance (the stable walking distance and walking speed). Compared with the leg distance, with or without toes (metatarsal phalangeal joint) in the foot has a secondary influence on walking speed, while the height of the walking machine has secondary influence on the maximum walking distance.
双足机器人因其具有良好的地形适应能力、更加适合在人类生存环境下工作而受到越来越多的关注。传统的主动控制双足机器人大多通过对各关节施加复杂驱动控制来进行实时、精确的轨迹追踪与运动规划, 以确保机器人的稳定行走[1]。但研究表明[2, 3], 此类机器人普遍存在控制系统复杂、能耗高的问题, 如具备杰出运动性能的本田公司开发的ASIMO机器人, 其无量纲步行机械能耗COT(Cost of translation)高达1.6[4], 约是人体行走能耗的30倍, 进而限制了此类机器人进一步的实用化发展。
由McGeer[5]提出的被动行走是有别于传统步行的新概念。完全被动行走是指在没有任何主动驱动输入的情况下, 充分利用机器人自身的被动动力学特性, 仅依靠自身重力稳定地走下斜坡[6]。McGeer根据此原理制作了一款二维完全被动双足步行机[7], 为之后的完全被动双足步行机研究奠定了基础。
继McGeer的开创性工作之后, 美国、欧洲与日本的多所大学和研究机构对被动步行开展了多项研究。美国康奈尔大学Ruina研究团队[8]改进了McGeer的二维被动行走机构, 并在此基础上设计了带膝关节的三维完全被动双足行走机器人。美国麻省理工学院设计了一款拥有整体弧形足的三维被动行走机器人[9], 该机器人可以借助整体弧形足的作用在斜面上完成三维行走。日本名古屋工业大学设计了一款二维被动行走机器人[10], 实现了稳态连续行走。日本庆应义塾大学设计了一款平面足三维被动行走机器人, 该机器人利用装有弹簧的踝关节, 配合平面足实现了三维行走[11, 12]。
综上所述, 目前的完全被动双足步行机均实现了在斜面上的无驱动行走, 同时在一定程度上也揭示了基于被动动力学的节能行走原理。但分析发现, 当前有关完全被动双足步行机的足部的设计多数采用圆弧足一体化设计, 较少考虑足部关节的作用, 个别使用平面足的完全被动步行机, 如日本庆应义塾大学开发的完全被动步行机, 其行走成功率也仅为4%, 并未达到稳态行走[12]。同时, 现有的完全被动双足步行机较少考虑足部的仿生设计。而人体通过精细复杂的肌肉-骨骼系统可以实现多种高效节能的运动模式, 其COT仅为0.05[4], 由此为新型节能步行机的发展提供了仿生模本和新思路。因此, 本文基于人体足部关节结构进行仿生设计, 开发了一种同时具备距下关节及跖趾关节(含脚趾)的仿生完全被动步行机, 并对其行走性能进行了试验测试与分析。
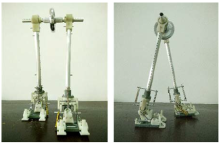
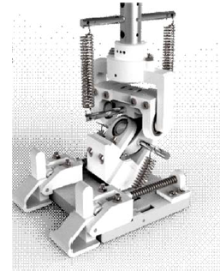
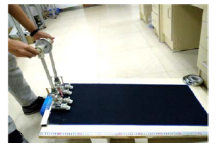
完全被动仿生双足步行机(见图1)的本体结构主要分为三部分:髋关节、腿部、仿生足。该步行机开发采用了模块化的设计思想, 各部分可以自由分离、便于参数调节与部件更换。
 | 图1 步行机样机Fig.1 Prototype of walking machine |
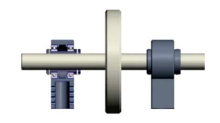
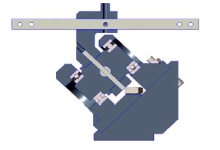
如图2所示, 髋关节以铝合金管为主体, 两侧的髋-腿连接件采用ABS材料通过3D打印制作, 并结合薄壁轴承形成转动副, 成对使用的薄壁轴承可以最大限度地加强髋-腿连接件的转动稳定性。髋关节配重位于髋关节中部, 试验测试中, 可以通过更换配重或者通过调节配重与地面的间距实现机器人重心高度的调节。
 | 图2 髋关节构型Fig.2 Configuration of hip joint |
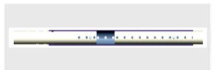
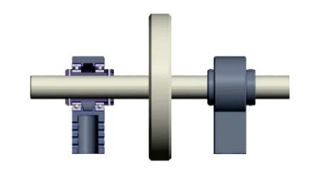
如图3所示, 腿部采用三段嵌套式铝合金管设计, 两端的铝合金管与中间的铝合金管形成移动副, 通过移动铝合金管可以在一定范围内自由调节腿的长度。每段铝合金管上均布通孔, 在确定腿部长度之后, 通过销钉插接的方式使三段铝合金管固连。
 | 图3 腿部构型Fig.3 Configuration of leg |
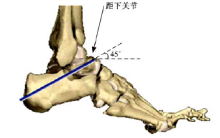
生物运动力学研究表明[13], 人体足部距下关节(见图4)在矢状面内的倾角为45° 左右, 该关节的倾斜轴, 对人类的高效行走具有重要贡献。在行走过程中, 地面反作用力力臂的大大减少使脚底屈肌的运动效率增加, 进而减少肌肉组织受到的应力, 增加人体运动的能量利用率。另外, 这种倾斜分布的关节轴使足踝能够产生叠加的三维运动。
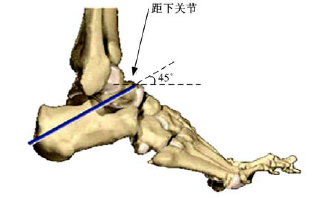 | 图4 人体足部距下关节Fig.4 Subtalar joints of human foot complex |
因此, 本研究中仿生足的设计主要包含仿生距下关节设计以及仿生足趾设计两部分。其中仿生距下关节参考人类足部的距下关节的构型进行设计。
根据人体足部结构特点, 设计的仿生足如图5所示。由于人体足部距下关节的关节轴在矢状面的角度为45° 左右, 故步行机物理样机的仿生距下关节的关节轴在矢状面上的倾角设定为45° , 距下关节内部结构如图6所示, 如果需要调节角度, 可通过更换零件实现。
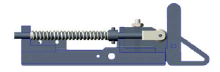
人体足部脚趾在脚垫与筋腱的共同作用下具备一定弹性, 可使人在行走或奔跑时有效吸收地面冲击, 同时实现弹性驱动, 有助于快速行走或奔跑[14], 同时, 脚趾在运动触地过程中, 亦能够协同跖部适应路面地形的变化, 具有重要的生物运动功能特征。本文基于人体足部脚趾的结构特征设计了如图7所示的仿生脚趾, 该脚趾可以将步行机作用于趾部的动能转化为弹簧的弹性势能, 在之后的行走过程中再将弹簧储存的弹性势能释放并转化为步行机行走的动能。
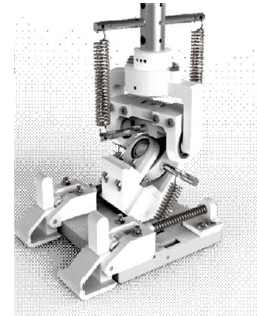 | 图5 仿生足构型Fig.5 Configuration of bionic foot |
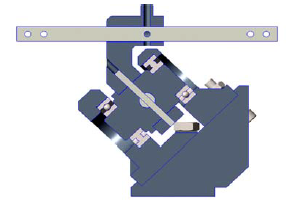 | 图6 仿生距下关节构型Fig.6 Configuration of bionic subtalar joint |
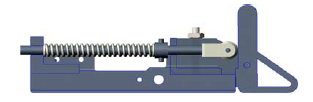 | 图7 仿生跖趾关节构型Fig.7 Configuration of bionic metatarsal phalange joint |
基于上述设计原理, 本文开发了完全被动仿生双足步行机物理样机, 并在一定测试条件下完成了连续10次以上的重复行走, 实现了稳定步态行走。
本文针对机器人步行机高度(重心高度)、腿间距以及有、无足趾3个因素对步行机行走性能的影响进行了试验研究, 确定了研究范围内的最佳结构参数。实验测试条件为:斜坡倾角为9° , 长度为1 m。
步行机的重心高度对其行走稳定性、行走速度、侧向摆动的幅度有重要影响[5], 因此本文首先针对该参数进行了单因素试验测试。
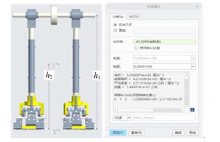
测试试验通过调节步行机高度h1(配重与地面距离)来调节步行机重心的高度h2。本研究采用Creo Parametric软件, 赋予模型材料属性, 模拟测量不同配重高度下步行机的重心高度。实际研制的步行机物理样机的质量为1435.0 g, 通过Creo Parametric软件测量步行机整机质量为1433.1 g(见图8), 误差为0.1%, 因此可以保证软件重心测量的准确性。试验研究了步行机高度(重心高度)变化(366~406 mm)对步行机行走性能的影响。
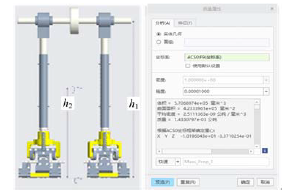 | 图8 测量重心与质量属性Fig.8 Measurement of center of gravity andmass properties |
为了确定研究范围内最佳行走状态的步行机高度(重心高度)区间, 本文在步行机高度区间(366~406 mm)内, 每隔5 mm进行一组试验测试, 共9组, 结果如表1所示。样机初始启动状态如图9所示。
每组试验在改变步行机高度之后, 分别进行多次重复行走试验, 之后, 在重复行走试验结果中剔除人为因素(如初始启动失败)或者行走发生偏斜的情况, 最后选取具有普遍性的5次试验结果, 计算行走距离的平均值。此测试中, 其他设计参数保持不变, 其中, 腿间距为140 mm, 步行机足部为有足趾状态。
| 表1 完全被动仿生步行机高度与重心关系 Table 1 Relationship between height and center of gravity of a completely passive bionic walking machine |
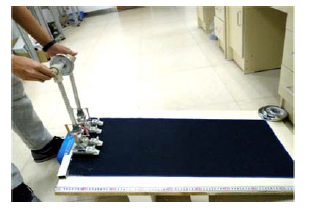 | 图9 样机的初始启动状态Fig.9 Initial launch status of prototype |
为了保证每次初始启动的一致性, 在试验斜面添加参照物, 每次启动时, 保证右侧腿在抬起时靠右侧的足跟接近标记物左上角。同时, 试验斜面放置有刻度标记尺, 可以准确地读取步行机在试验斜面所行走的距离, 方便对速度等参数进行后续计算。
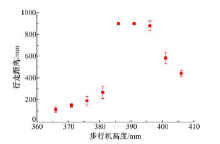
研究发现, 当步行机高度分别为386、391、396 mm时, 物理样机可以完成沿整个试验斜面的行走, 相对应的重心高度分别占步行机高度的58.11%、58.03%、57.93%。从图10中可以看出, 初始阶段, 随着步行机高度逐渐增大(h1≤ 381 mm时), 步行机沿斜面的行走距离呈逐渐增加趋势(但测试中发现, 由于重心高度不足, 导致步行机的侧向摆动幅度不够, 步幅过小, 且容易发生摆动腿擦地的现象), 当步行机高度增大到理想的步行机高度时(386、391、396 mm), 步行机可以完整走过测试斜面, 而当步行机高度继续增大时(h1> 396 mm), 由于重心过高, 步行机由于重心失稳而开始产生步态失衡甚至跌倒等行走失败现象, 无法完整地走完测试斜面。
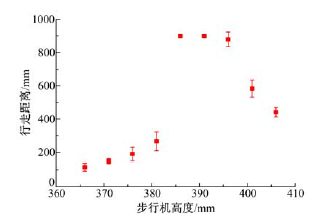 | 图10 行走距离变化Fig.10 Variation of walking distance |
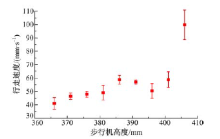
同时, 本研究对每组行走试验的行走速度进行了统计分析, 结果如图11所示。由图11可知, 在达到最大行走距离之前, 随着步行机高度的增大, 步行机的行走速度逐渐增大, 当步行机高度为386 mm时, 步行机达到相对较高的速度, 相应的行走距离也达到最大, 即步行机达到最佳的行走状态; 随着步行机高度继续增加到391、396 mm时, 虽然步行机依然能够达到最大行走距离, 但由于重心偏高, 侧向摆动幅度偏大, 使得每步切换与调整的时间增长, 进而导致行走速度的下降; 当步行机高度继续增大, 达到401、406 mm时, 由于重心过高, 步行机已经失去了稳定行走能力, 虽然行走速度陡升, 但是行走距离十分有限, 已处于非理想稳态行走状态, 最终多以跌倒结束行走。
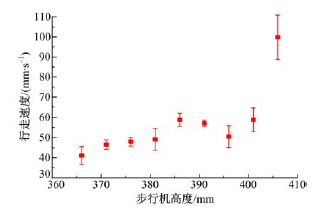 | 图11 行走速度变化Fig.11 Variation of walking speed |
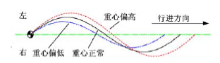
进一步分析可知, 本研究开发的完全被动仿生步行机的行走是矢状面运动与冠状面运动的复合运动。该步行机在行走时, 重心在水平面内的投影变化如图12所示。当步行机重心过低时, 重心在平面内的左右摆动幅值较小, 步态切换周期较短, 进而容易发生摆动腿擦地现象, 致使重力势能无法有效转化为行走动能, 造成步行机不能克服斜面对足部的摩擦力而终止行走; 而步行机重心过高时, 重心在行走平面内的左右摆动幅值较大, 步态切换周期也随之增长, 因此易于发生矢状面内摆动过度的现象, 进而导致步行机发生运动失稳, 甚至跌倒。
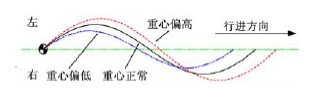 | 图12 重心在水平面内的投影Fig.12 Projection of center of gravity on horizontal plane |
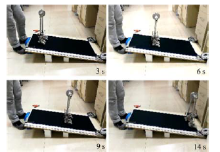
通过比较图10及图11中步行机高度(重心高度)对行走距离以及行走速度的影响, 本部分测试最终确定了能够达到最佳行走状态的两组步行机高度数据分别为:步行机高度为386 mm, 重心高度为224.3 mm, 重心高度占步行机高度的58.11%; 步行机高度为391 mm、重心高度为226.9 mm, 重心高度占步行机高度的58.03%。图13为步行机高度为386 mm时的行走测试试验过程示意图。
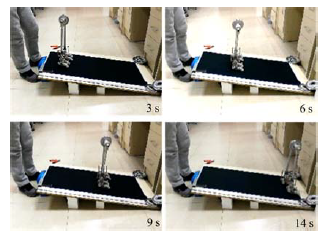 | 图13 行走测试试验(步行机高度为386 mm)Fig.13 Walking test when height of walking machine is 386 mm |
为了综合分析多设计因素对步行机行走性能的影响, 确定研究范围内的因素优水平及对步行机行走性能影响的主次因素, 本文在2.1节的研究基础上, 选定步行机高度、有无脚趾和腿间距3因素进行了试验设计。其中步行机高度为2水平(386、391 mm), 有、无脚趾为水平2; 腿间距为水平4(150、140、130、120 mm), 因素水平表如表2所示。根据试验设计及其优化原则, 针对多因素水平不等情况, 本研究进行了混合正交表试验设计。
| 表2 因素水平表 Table 2 Table of factors and levels |
实际试验测试方案按照表3和表4的实验号进行, 共进行8组试验, 经过计算与分析, 最终获取了研究范围内影响步行机行走距离、行走速度的主次因素和优水平。
| 表3 步行机行走距离试验结果分析表 Table 3 Analysis of results of walking distance |
| 表4 步行机行走速度试验结果分析表 Table 4 Analysis of results of walking speed |
由表3可知, 研究范围内, 对步行机行走距离影响的主次因素分别是:腿间距(A)、步行机高度(B)、有无脚趾(C); 最优组合为:A2B1C1, 即在腿间距为140 mm、步行机高度为386 mm、有脚趾时, 步行机可以达到最远的稳定行走距离。
结合表4可知, 对步行机行走速度影响的主次因素分别是:腿间距(A)、有无足趾(C)、步行机高度(B); 最优组合为:A4B1C1, 即在腿间距为120 mm、步行机高度为386 mm, 有足趾时, 步行机具备最快的行走速度, 但需要指出, 尽管此时速度较快, 而步行机开始处于非稳态行走状态。
本研究以人体足部关节构型为生物模本, 进行了具有仿生距跟关节及跖趾关节的新型完全被动仿生步行机的研制, 并分别基于单因素与多因素试验, 针对该步行机的行走性能进行了测试, 获取了研究范围内的主次因素与最优组合, 为后续用于水平路面行走的半被动仿生步行机的研制提供重要的技术基础。进一步的研究工作, 拟在本文基础上, 开发具备膝关节的仿生步行机, 并对其结构参数进行优化, 以期实现更加自然稳定的行走模式。
(1)基于人体足部距下关节及跖趾关节特征, 开发了具有仿生距下关节(矢状面内关节轴倾角为45° )和仿生跖趾关节(添加脚趾)的完全被动仿生双足步行机。
(2)针对该步行机, 进行了单因素与多因素的行走试验。试验表明, 研究范围内, 该步行机可以达到稳态行走, 并且重复行走成功率较高。
(3)研究范围内, 对完全被动步行机行走性能(稳定行走距离和行走速度)影响最大的因素为腿间距, 其次, 足部有无脚趾对步行机的稳定行走速度具有次要影响, 而步行机高度则对稳定行走的最大距离具有次要影响。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|