

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
柴油机主-从双微元Urea-SCR系统非线性状态观测器设计与分析
引用本文
宫洵, 蒋冰晶, 胡云峰, 曲婷, 陈虹. 柴油机主-从双微元Urea-SCR系统非线性状态观测器设计与分析[J].吉林大学学报(工学版), 2018,48(4): 1055-1062
GONG Xun, JIANG Bing-jing, HU Yun-feng, QU Ting, CHEN Hong. Design and analysis of nonlinear state observer for master-slave two cell Urea-SCR system of diesel engine[J]. Journal of Jilin University Engineering and Technology Edition, 2018,48(4): 1055-1062
Doi:10.13229/j.cnki.jdxbgxb20171213GONG Xun, JIANG Bing-jing, HU Yun-feng, QU Ting, CHEN Hong. Design and analysis of nonlinear state observer for master-slave two cell Urea-SCR system of diesel engine[J]. Journal of Jilin University Engineering and Technology Edition, 2018,48(4): 1055-1062
Permissions
Copyright©2018, 吉林大学学报编辑部
版权所有 吉林大学学报编辑部
柴油机主-从双微元Urea-SCR系统非线性状态观测器设计与分析
作者简介:宫洵(1988-),男,在站博士后.研究方向:发动机建模与控制.E-mail:gongxun10@hotmail.com
摘要
针对Urea-SCR状态反馈控制系统存在不可测状态变量的问题,首先,分析了SCR系统的化学反应机理,为了描述SCR系统的分布参数特性,给出了包含上游-下游(主-从)两个单元的SCR系统双核动力学模型;其次,利用Urea-SCR系统下游氨浓度及氮氧化物浓度的测量值,设计了非线性降维观测器估计上游氨浓度、上下氨覆盖率等不可测的状态变量,同时在Lyapunov稳定性框架下,分析了观测器的稳定性,并据此给出了保证观测器稳定的观测器增益的取值范围;最后,在发动机动力学仿真软件enDYNA中,通过FTP75循环测试工况仿真测试,验证了该方法的有效性。
关键词:
动力机械工程; 柴油发动机; 选择催化还原控制系统; 非线性观测器; 稳定性分析
中图分类号:TK411
文献标志码:A
文章编号:1671-5497(2018)04-1055-08
Design and analysis of nonlinear state observer for master-slave two cell Urea-SCR system of diesel engine
Abstract
As one of the effective approaches to reduce NO x emission of diesel, Urea Selective Catalytic Reduction (Urea-SCR) can catalytically convert toxic NO x emission to nitrogen and water by accurately controlling the amount of ammonia injection. However, there still exists problem such as non-measurable states in Urea-SCR. To resolve this problem in the Urea-SCR feedback control system, first, the chemical reaction mechanism of DCR system is analyzed and a model containing both upstream and downstream (master-slave) elements is introduced. Second, a nonlinear reduced-order observer is designed to observe the non-measurable states by utilizing the concentration measurement downstream ammonia and NO x, meanwhile, the stability of the observer is analyzed and the value range of the observer parameter is calculated based on stability analysis. Finally, the effectiveness of the proposed approach is testified by simulation in enDYNA employing FTP75 cycle test procedure.
Keyword:
power machinery engineering; diesel engine; SCR control system; nonlinear observer; stability analysis
0 引 言
由于柴油发动机比汽油发动机具有更好的动力性与燃油经济性, 这使得柴油发动机在中/重型车辆中占有统治地位, 并在轻型车领域快速扩张[1]。但是由于柴油机采用稀燃的方式导致其尾气中含有大量的氮氧化物(NOx)[2, 3]。为了减少NOx对环境的污染, 研究人员提出了尾气后处理技术, 其中Urea-SCR尾气后处理技术由于成本较低且转化效率高, 得到了广泛应用。该技术利用氨(NH3)将柴油机尾气中的NOx还原为N2与H2O, 其中NH3是由浓度为32.5%尿素溶液(俗称” 添蓝” )分解产生。
柴油发动机Urea-SCR控制系统的目标是使NOx的排放量满足排放法规要求, 同时尽量避免有异味的NH3逃逸, 目前投入市场的Urea-SCR系统主要以开环控制策略为主, 该方法具有逻辑简单, 工程实现方便等优点[4, 5], 但是无法满足国五排放标准对NOx排放量的要求, 为此研究人员提出了一种基于NH3覆盖率的Urea-SCR系统的闭环控制方法。该方法首先以NOx的转化率为目标, 以NH3的逃逸率为约束, 离线优化出满足性能指标及约束的NH3覆盖率的期望值, 进一步通过NH3的覆盖率的跟踪控制实现发动机的排放要求[4, 5, 6, 7]。文献 [4, 5]中基于Urea-SCR系统的集中参数模型, 采用基于模型的NH3覆盖率控制器设计方法, 实现了NH3覆盖率的闭环控制。但对于商用车中使用的拥有较大尺寸的Urea-SCR系统, 由于系统上游-下游状态变量的差异比较大, 如果继续使用集中参数模型去设计控制器, 难以满足Urea-SCR系统的控制需求。针对上述问题, 文献[6, 7]建立了包含上游-下游(主-从)两个微元的Urea-SCR模型, 并采用反步法等非线性控制方法设计NH3覆盖率跟踪控制器, 达到了较好的控制效果。
Urea-SCR系统的闭环控制策略虽然能够提高系统的控制效果, 但是由于所设计的控制器均是状态反馈控制器, 需要对状态变量进行实时测量, 而实际产品中由于成本等约束, 现有的Urea-SCR系统产品中只在后处理系统的尾部(下游)安装了NH3和NOx浓度传感器。因此需要设计观测器估计NH3覆盖率等不可测的状态变量。目前, 针对集中参数NH3覆盖率跟踪控制系统, 文献[7, 8, 9]设计了非线性观测器对NH3覆盖率及NH3浓度进行了估计; 文献[10]采用扩展Kalman滤波对NH3覆盖率和NOx浓度分别进行了估计。针对包含上游-下游两个微元的Urea-SCR系统, 文献[11]中设计全维滑模观测器对上游、下游NH3的浓度及覆盖率进行了估计, 但其在估计过程中忽略了NOx浓度对上述变量估计效果的影响。文献[12]对Urea-SCR下游NOx浓度、NH3的浓度及排气处NOx的浓度进行测量, 对上游、下游NH3的浓度及覆盖率进行了估计。本文针对包含上游-下游两个微元的Urea-SCR系统, 以下游NOx浓度、NH3浓度为测量值, 设计了非线性降阶观测器对上游NOx浓度、NH3浓度、NH3覆盖率及下游NH3覆盖率进行了估计, 并在Lyapunov稳定性的框架下证明了观测器误差系统的渐近稳定性, 并据此给出了观测器增益的选取范围; 最后在FTP75工况下, 通过Simulink仿真实验对其有效性进行了验证。
1 Urea-SCR系统建模
Urea-SCR系统利用尿素分解产生的NH3作为还原剂, 将柴油发动机中的NOx还原为H2O、N2, 从而达到减少柴油机尾气中NOx排放的目的。在上述过程中会发生一系列复杂的化学反应, 其中主要包括尿素水溶液的分解、NH3的吸附与解吸附、选择性催化还原反应以及NH3的氧化反应, 具体的反应原理如图1所示。
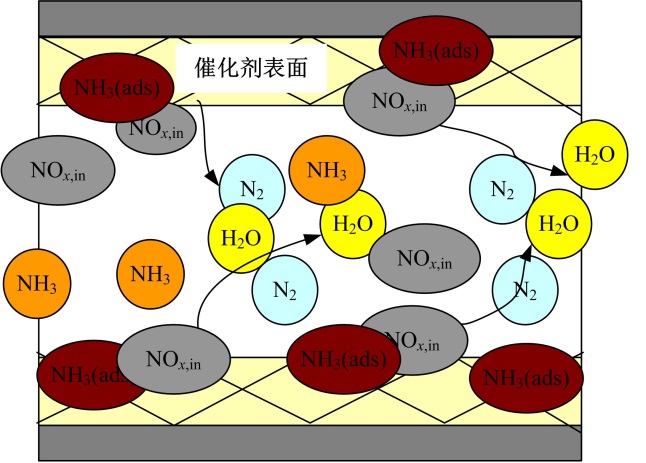 | 图1 Urea-SCR化学反应示意图Fig.1 Schematic presentation of the Urea-SCR reaction |
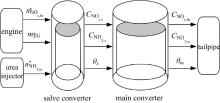
在Urea-SCR系统中, NH3的浓度、NOx的浓度及NH3的覆盖率都是沿催化器的轴向及径向变化的状态变量, 是典型的分布参数式系统。本文为了简化Urea-SCR模型, 在建模过程中, 将Urea-SCR系统沿轴向分成上游和下游两个单元进行建模, 如图2所示。如果将Urea-SCR系统分为上游、下游两个单元, 其中第一个单元输出的NOx浓度、NH3浓度及NH3的覆盖率作为下游的输入, 就可以得到上游-下游两个单元的Urea-SCR模型, 其中上游和下游的体积比例为1∶ 2。
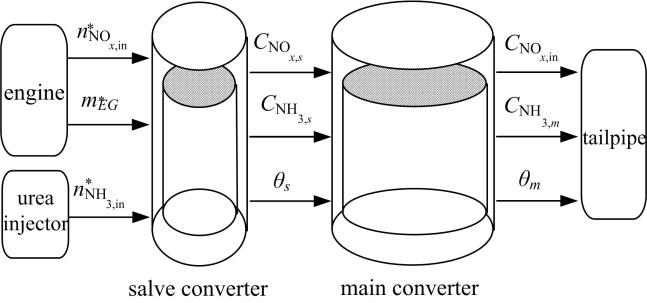 | 图2 上游-下游U-SCR系统结构图Fig.2 Upstream-downstream structure diagram of U-SCR system |
关于包含上游-下游两个单元的Urea-SCR的建模问题已经得到广泛的研究, 具体建模过程可参见文献[6, 7], 本文直接给出系统的动力学模型如下所示:
式中:下标
其中, 建模过程中所使用的常量及变量如表1、2所示。
| 表1 常量命名法 Table 1 Constants nomendature |
| 表2 变量命名法 Table 2 Variables nomendature |
2 非线性观测器的设计
在使用Urea-SCR模型设计反馈控制器时, 需要对Urea-SCR系统上下游的状态变量的测量值作为反馈信息。但出于成本考虑, 现有的Urea-SCR系统产品中只对Urea-SCR系统下游(出口处)NOx浓度及NH3浓度进行测量; 因此需要设计观测器对上游NOx浓度, NH3浓度, NH3覆盖率及下游NH3覆盖率进行估计:
定义
式中:
上述公式中: 


其中, 下标
针对系统(3)的状态变量估计问题, 由于系统存在可测状态变量, 本文设计非线性降维观测器对主-从微元中不可测的状态变量
因为上游NH3的浓度、NH3的覆盖率及下游NH3的覆盖率直接影响下游NH3浓度, 所以本文在估计
式中:
定义状态变量
将式(3)(4)代入式(7)中可以得到估计误差具体的表达式, 如式(8)所示:
定义误差系统的Lyapunov函数:
式中:
把式(8)代入(10)中有:
利用三角不等式
式中:
其中令观测增益
将式(12)代入式(11)中有:
为了保证观测器误差系统的Lyapunov函数的导数小于零, 需要满足式(16~19)成立, 即有状态变量的估计值收敛于其真实值。
解不等式(16)~(19)得如下不等式:

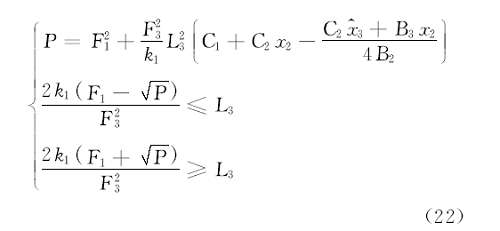
 |
式(20)中,
通过以上分析可知式(20)~(23)同时成立时, 式(15)即Lyapunov函数小于等于零, 从而保证降阶观测器稳定。
通过上面的讨论可以看出为了保证Lyapunov函数的稳定性, 观测器增益需要满足式(20)~(23)与式(14)。在(21)~(23)中,
步骤1 首先选择
步骤2 根据式(21)、式(20)及式(23)确定参数
步骤3 根据式(14)确定观察增益
步骤4 根据式(22)确定观测增益
步骤5 根据式(20)、(23)确定观测增益
因为在设计降维观测器的过程中使用到了NOx浓度, NH3浓度的微分信号, 所以本文使用了如(25)所示的跟踪微分器对下游NOx浓度及NH3的浓度的微分信号进行提取:
式中:
3 仿真分析
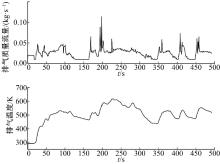
本文使用FTP75瞬态工况通过仿真实验对上述降维观测器的估计性能进行分析, FTP75工况如图3、图4所示。在仿真过程中, 考虑以下两个方面对于观测器估计性能的影响:①在实际过程中, 每个微元中的温度不可能是均匀分布的而且温度对Urea-SCR模型中化学反应速率有着直接的影响, 这将导致Urea-SCR模型中参数的不确定性。本文通过仿真实验, 分析了由于温度变化而导致的参数不确定性对观测器性能的影响; ②考虑到测量噪声对观测效果的影响, 本文在仿真过程中对NOx的浓度及NH3的浓度加入了测量噪声。
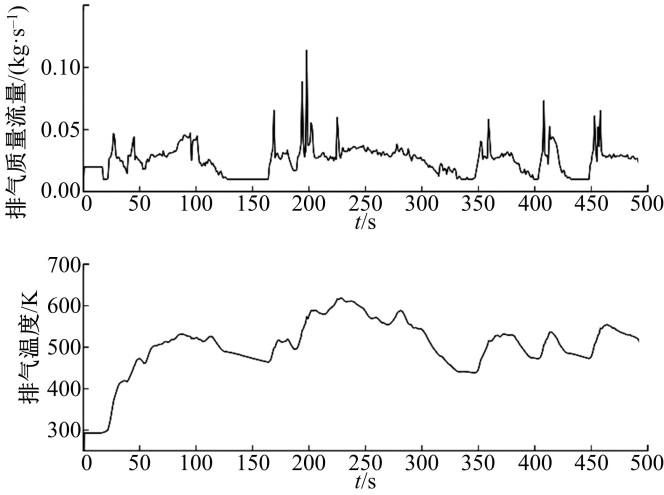 | 图3 工况(排气温度、排气质量流量)Fig.3 Working condition(exhaust temperature、 exhaust mass flow) |
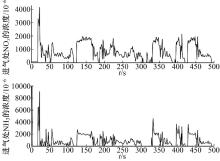
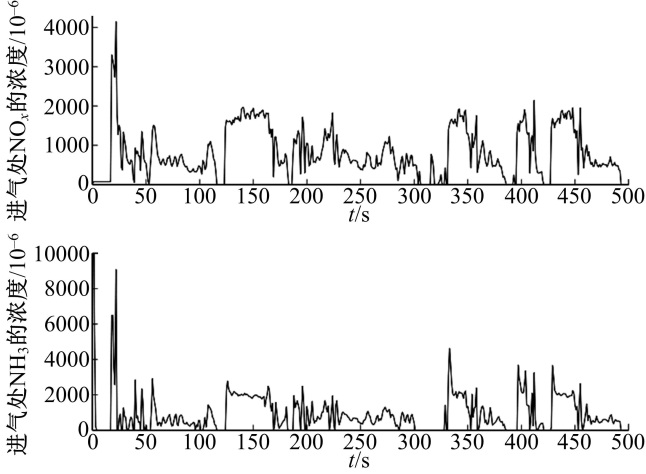 | 图4 工况(进气处NOx/NH3的浓度)Fig.4 Working condition(intake NOx/NH3 concetration) |
在仿真实验过程中, 虽然
本文主要考虑参数不确定性(
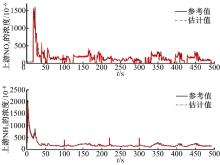
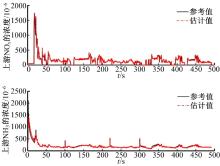
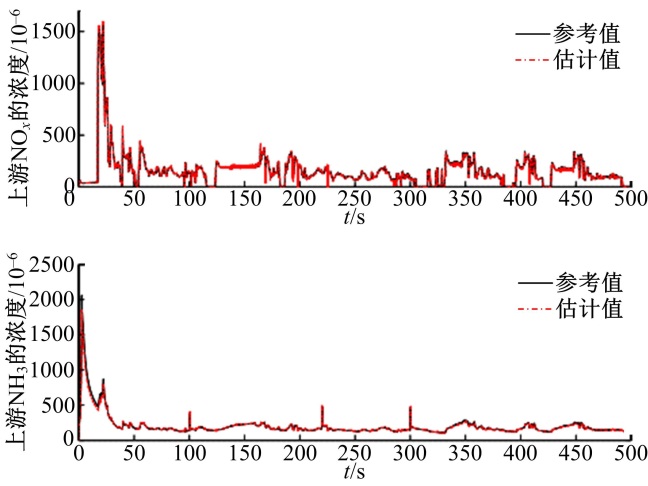 | 图5 cs=7.3时上游NOx/NH3浓度的估计效果Fig.5 The estimation result of upstream NOx/NH3 concentration with cs=7.3 |
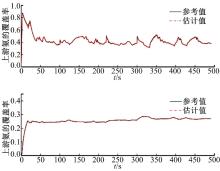
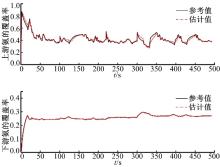
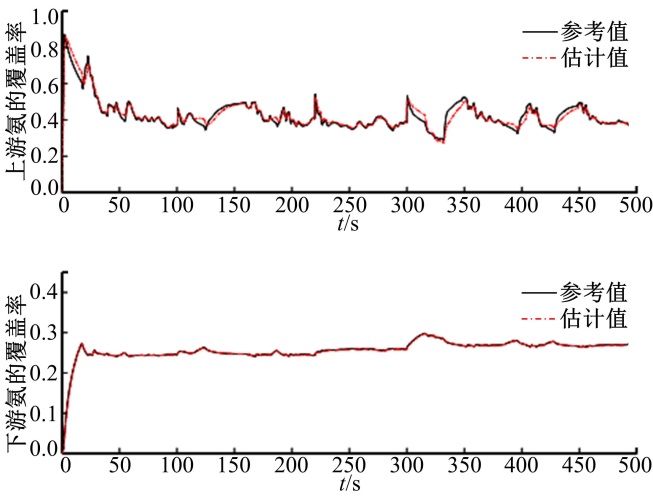
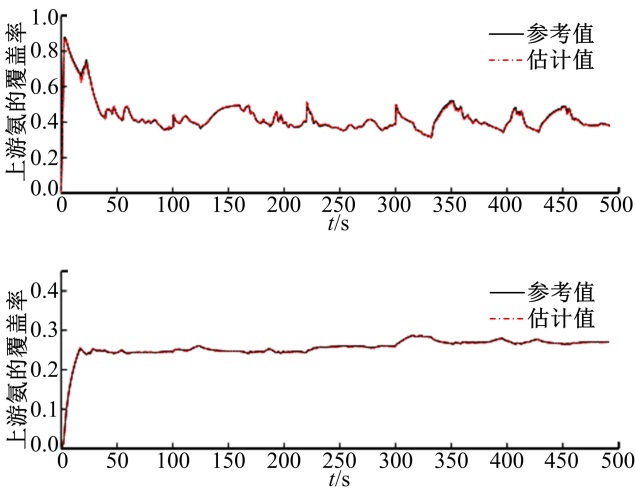 | 图6 cs=7.3时上、下游氨覆盖率的估计效果Fig.6 The estimation of upstream and downstream ammonia coverage ratio with cs=7.3 |
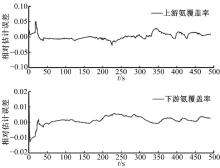
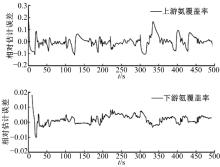
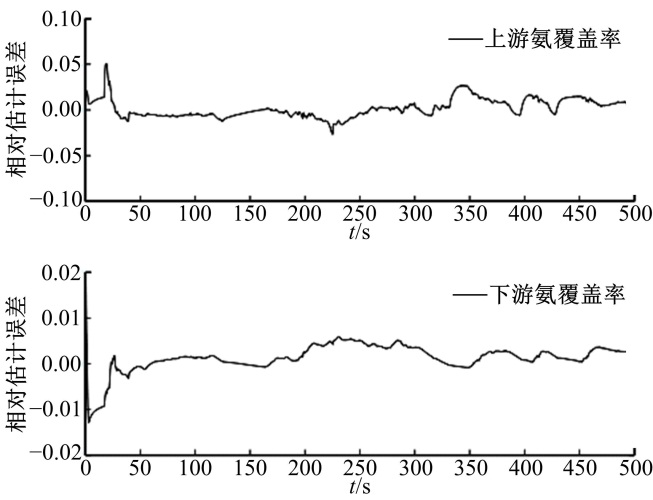 | 图7 cs=7.3时上、下游氨覆盖率的相对估计误差Fig.7 The relative estimation error of upstream and downstream ammonia coverage ratio with cs=7.3 |
 | 图8 cs=5.3时, 上游NOx/NH3浓度的估计效果Fig.8 The estimation result of upstream NOx/NH3 concentration with cs=5.3 |
 | 图9 cs=5.3时上、下游氨覆盖率的估计效果Fig.9 The estimation of upstream and downstream ammonia coverage ratio with cs=5.3 |
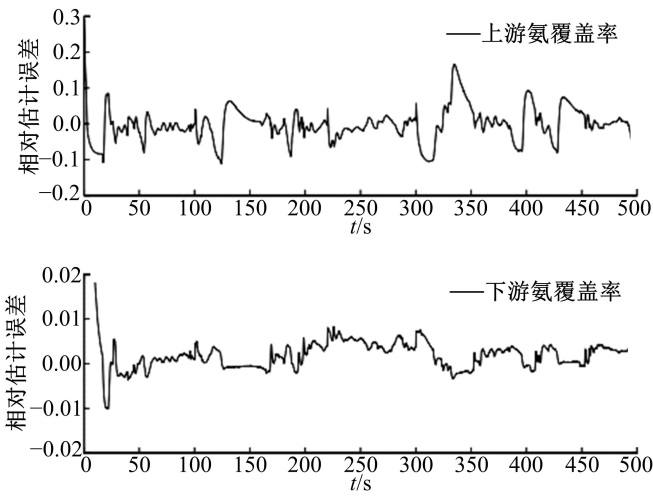 | 图10 cs=5.3时上、下游氨覆盖率的相对估计误差Fig.10 The relative estimation error of upstream and downstream ammonia coverage ratio with cs=5.3 |
4 结束语
本文基于双微元的Urea-SCR系统, 利用Urea-SCR系统下游NOx浓度及NH3浓度的测量值设计了非线性降维观测器, 并在Lyapunov稳定性框架下证明了观测器误差系统的稳定性, 同时据此给出了观测器增益的取值范围。由仿真仿真实验可知, 该观测器能较好地估计上游NOx的浓度、上游NH3的浓度、上游NH3覆盖率及下游NH3覆盖率。另一方面, 本文设计的观测器与全维观测器相比, 降低了工程实现工程过程中在线计算的工作量, 有利于进一步的工程化应用。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|