

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于电阻在线估计的电动助力转向感应电机控制
[赵飞翔 , 张建伟, 郭孔辉, 张立浩]
, 张建伟, 郭孔辉, 张立浩]
, 张建伟, 郭孔辉, 张立浩]
|
|


赵飞翔(1987),男,博士研究生.研究方向:汽车仿真与控制.E-mail:feixiang549@163.com
针对电动助力转向系统中感应电机的力矩控制精度和响应速度问题,建立了电动助力转向系统数学模型,分析了在应用同步坐标系下的电流模型进行磁链观测时,电机转子电阻变化对力矩控制精度的影响。采用前馈反馈综合控制和电阻在线辨识的方法对感应电机的电流跟随速度和力矩控制精度进行改善。通过仿真表明,该方法可以显著提高电动助力转向系统中感应电机力矩控制的响应速度和控制精度。
In order to improve the torque control accuracy and response in Electric Power Steering (EPS) using induction motor, an EPS mathematical model was established. When using D-Q current model as the rotor flux observer, the impact the of the variation of rotor resistance on the torque control was analyzed. The feedforward and feedback integrating control and on-line resistance identification were employed to improve the accuracy of torque control and current tracking response. Simulation results show that the proposed method can significantly improve the current response speed and accuracy in induction motor control of EPS system.
电动助力转向(Electric power steering,EPS)系统是一种使用电动机进行辅助转向来减轻驾驶员劳动强度并提高操纵稳定性和舒适性的力矩伺服系统。在目前车辆中应用的助力电机以永磁直流有刷电机为主[ 1],近年来,随着感应电机控制方法的创新和改进,感应电机的动态特性和力矩响应已经可以与直流电机相媲美,且感应电机与直流有刷电机相比具有结构简单、免维护、成本低、转速高,转动惯量小等优点,文献[ 2, 3]对感应电机作为电动助力转向系统的执行器做了简单应用。
在感应电机转子磁场定向控制中,力矩估算、磁链位置估算、电流控制以及故障诊断等功能模块均需要电机参数的参与,但是电机电阻受温度和集肤效应的影响会发生变化,其变化范围约为名义值的0.5~1.5倍;电机参数变化会对磁场定向和力矩控制的准确性产生影响[ 4, 5]。
在转子磁场定向准确的情况下,感应电机可以实现磁链和力矩的解耦控制,此时力矩控制问题转变为电流控制问题,文献[ 6]采用前馈和模糊PID的方法对EPS中直流有刷电机的电流控制进行了改善,但没有提出对电机参数变化的根本解决办法。文献[ 7]对感应电机的常用电流控制算法进行了简介,但算法以反馈控制为主,存在原理性的滞后。
本文建立了感应电机电动助力转向系统的动力学模型和Matlab/Simulink仿真模型,分析了应用电流模型时,转子电阻变化对EPS基本助力特性的影响;为改善电流响应速度,采用前馈加PI反馈的方法对定子电流进行控制。为消除电机电阻变化所引起的力矩控制误差和前馈性能减弱,采用模型参考自适应方法对感应电机定子电阻和转子电阻进行在线校正。结果表明,此种基于电阻在线校正的控制方法可以提高感应电机电动助力转向系统中的电流响应速度和力矩控制准确度。
为方便研究问题,对EPS动力学模型进行了适当的简化。不考虑转向系统摩擦,将齿条和两侧车轮等效为一个弹簧质量系统,转向系统动力学方程为
T h-T s=J c | (1) |

T s=K s(θ h-θ s) (2)
θ s=p/r p (3)
M r 

T assist=K m(θ m-pG/r m) (5)
T e=J m 

感应电机数学模型为


Te =np( is × ψr)(8)
式中: Th为转向盘操纵力矩; Ts为转矩传感器转矩值; Ks为转矩传感器扭转刚度; θh为转向盘转角; θs为转矩传感器下端转向轴转角; p为齿条位移; rp为转向小齿轮半径; rm为助力小齿轮半径; Mr为齿条和车轮等效质量; Br为齿条阻尼系数; Kr为齿条和车轮等效刚度; Tassist为电机输入减速器的转矩; G为电机减速器的涡轮蜗杆传动比; Km为电机传动轴刚度; θm为电机转角; Jm为电机及蜗杆转动惯量; Bm为电机阻尼系数; Te为电机电磁转矩; is为感应电机定子电流矢量; ψr为转子磁链矢量; us为定子电压矢量; ωr为转子角速度; Rs为定子电阻; Rr为转子电阻; Ls为定子自感; Lr为转子自感; Lm为定、转子互感; Tr为转子时间常数; σ为漏磁系数; np为感应电机极对数。
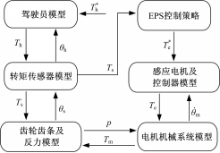
根据 EPS系统的动力学模型,采用 Matlab/Simulink建立的感应电机电动助力转向系统模型如图1所示,其中驾驶员模型按照文献[ 8]的模型进行搭建;系统输入为转向盘转角指令,输出为齿条位移。感应电机控制框图如图2所示,电机参数如下:
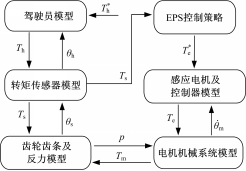 | 图1 感应电机EPS系统Simulink模型Fig.1 EPS model built in Simulink |
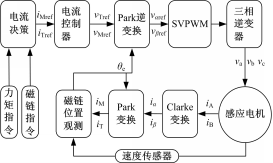 | 图2 感应电机力矩伺服控制框图Fig.2 Block diagram of torque control of induction motor |
定子电阻为3.1×10-2 Ω;转子电阻为1×10-2 Ω;定、转子互感为4.26×10-3 H;定子漏感为3.33×10-4 μH;转子漏感为3.33×10-4 μH。
本文选取感应电机控制中常用的同步坐标下的电流模型作为磁链位置观测模型,其观测模型如式(9)所示:
θ ψ=∫(ω r+ 
式中:θ ψ为转子磁链位置;i T为真实T轴电流;i M为真实M轴电流。
忽略电流控制器的响应速度,当电流达到稳态时,应有:
ω s= = =  | (10) |
式中:ω s为转差频率; 


由于i M、i T与 

 + +    | (11) |
综合式(10)(11)可得,助力电机真实输出力矩为
T e= | (12) |
式中: 
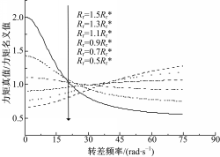
图3为转子电阻失准时力矩真值与力矩指令的比值曲线。
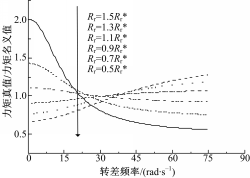 | 图3 Rr变化对力矩控制精度的影响Fig.3 Effect of Rr variation on torque control accuracy |
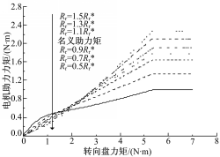
当给定驾驶员转向盘转角指令信号后,感应电机依据转向盘转矩信号进行助力控制,助力特性为直线型,当转子电阻名义值偏离实际值时,真实助力特性如图4所示。可以看出,当转子电阻偏离真值时,真实助力特性已不是直线型。当转子电阻小于真值时,在小助力区域真实助力值大于理论助力值,在大助力区域真实助力值小于理论助力值;当转子电阻大于真值时,情况刚好相反。且电阻名义值偏离真值越大,真实助力力矩偏移名义助力力矩越大。由此可见,当转子电阻偏离真值时,EPS的力矩控制策略难以实现,为保证力矩控制的准确度,必须对转子电阻进行在线估计或校正。
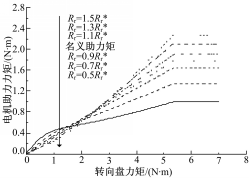 | 图4 Rr变化对直线型助力特性的影响Fig.4 Effect of Rr variation on linear assistance characteristics |
前馈控制是指在控制系统中,根据设定值或者外界干扰的变化,产生合适的控制作用去改变操纵变量,使受控变量维持在设定值上的一种控制方法[ 9]。当前馈通道的传递函数为被控系统的逆模型时,被控输出与系统输入指令完全相同。由于前馈控制量是直接通过系统输入指令和前馈模型计算的,只需一个控制周期即可实施,所以控制量直接根据指令进行动作,与传统基于误差的PID控制相比,其调节速度非常快。
在转子磁场定向坐标系下,定子电压和定子电流存在如下对应关系:
u M=R si M+σL s -σL sω ei T+ -σL sω ei T+  | (13) |
u T=R si T+σL s 

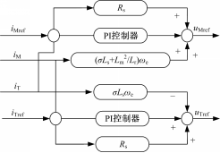
式(13)和式(14)等号右边的前两项为前馈项,后两项为耦合项。前馈项中存在对两轴电流的微分,由于微分项对测量噪声特别敏感,因此本文只采用第一项作为前馈模型,另外增加PI反馈控制环节以达到对微分项进行补偿的目的。前馈加反馈的定子电流综合控制框图如图5所示。
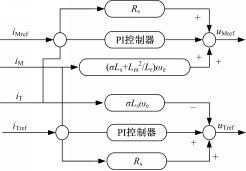 | 图5 感应电机电流综合控制框图Fig.5 Block diagram of induction motor current control |
分别采用电流阶跃指令和电流扫频指令实验对常规PID和前馈、反馈综合控制的性能进行验证。
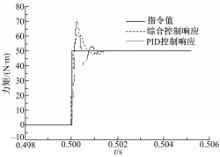
(1)在电流阶跃实验中,T轴目标电流做如下给定:在0.5 s时由0 A跳变到50 A。采用两种控制方法得到的T轴电流响应如图6所示。由图6可见,综合控制相对于闭环PI控制来说,提高了电流的响应速度,且超调量也有所减少。
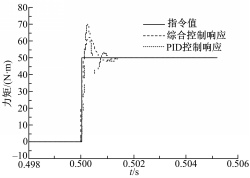 | 图6 阶跃实验电流相应对比Fig.6 Comparison of current step response with different control methods |
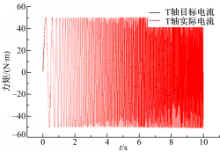
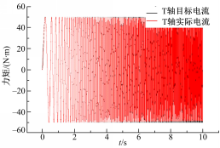
(2)采用电流指令扫频实验从频域角度验证电流的跟随效果,在扫频实验中,T轴目标电流做如下给定:保持幅值为50 A不变,频率由0 Hz逐步变化至40 Hz。电流跟随情况如图7和图8所示。
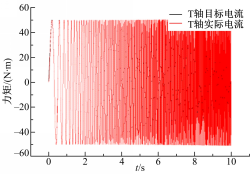 | 图7 应用前馈综合控制时的扫频实验电流跟随曲线Fig.7 Current tracking control by proposed method |
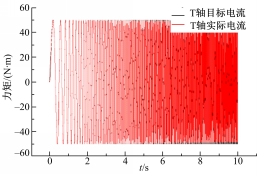 | 图8 应用传统PI控制时的扫频实验电流跟随曲线Fig.8 Current tracking control by conventional PI feedback control method |
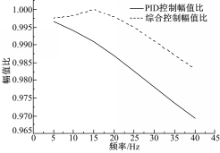
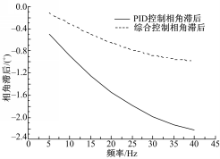
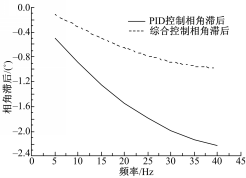
扫频实验中,真实电机力矩相对目标助力矩的幅值比和相角滞后分别如图9和图10所示。可以看出,与PID控制相比较,综合控制的幅值比更接近于1,且相位滞后更小,电流控制精度得以提高。
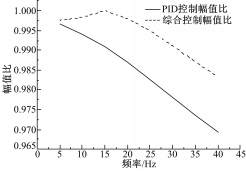 | 图9 输出电流对目标电流的幅值比Fig.9 Amplitude ratio of output to command current |
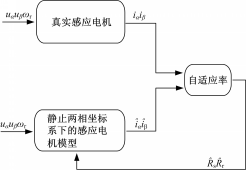
由于前馈环节中需要定子电阻的参与,当定子电阻名义值大于真值时,前馈环节的输出量偏大,容易使超调量增大;反之,当定子电阻名义值小于真值时,前馈环节输出量偏小,会增加反馈环节的调节时间。为消除电阻变化对力矩控制误差和响应速度的影响,采用MRAS(模型参考自适应)对感应电机的电阻进行在线辨识。如图11所示,采用真实电机为参考模型,以静止两相坐标系下的电机模型作为可调模型,根据李亚普诺夫稳定性理论对自适应率进行推导求解,参考MRAS的普遍结构,将电阻辨识模块取为比例积分形式。
电阻在线估计的自适应率为














式中: 





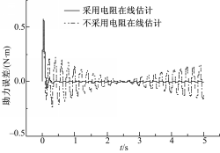
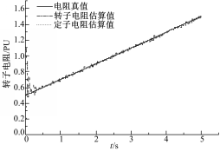
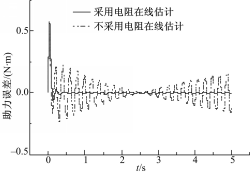
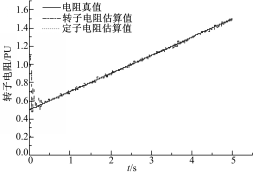
将助力电机力矩指令设定为频率为5 Hz,幅值为1 N·m的正弦曲线,在0~5 s的时间内转子电阻和定子电阻分别由名义值的0.5倍变化至1.5倍,采用在线估算电阻和采用名义电阻值的助力误差如图12所示。当不进行电阻在线估算时,助力误差为与助力指令频率相同的正弦信号,且误差幅值与电阻变化程度相关,当采用MRAS进行电阻在线估算时,助力误差很小,EPS的助力逻辑被很好地实现。转子电阻和定子电阻的估算结果如图13所示。图13表明:转子电阻和定子电阻的估计结果与电阻真值吻合程度比较高。
电动助力转向系统要求助力电机输出力矩的准确快速响应,在感应电机的转子磁场定向控制中,当电机参数变化时,磁链的观测误差会引起电机输出力矩偏离名义值,若磁场定向准确,则电流控制的性能直接关系到力矩控制的性能。本文分析了电机参数变化对电动助力转向系统助力特性的影响。为提高电流的响应速度,采用前馈加PI反馈的方法对感应电机定子电流进行控制,为消除电阻变化对力矩控制精度和电流响应速度的影响,采用模型参考自适应方法对定子电阻和转子电阻进行在线估计。仿真结果表明,此种基于参数自校正的电流控制算法可以显著提高电动助力转向系统中助力电机输出力矩的响应性能。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|