



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于最优控制理论的智能车辆轨迹生成方法
[李爱娟1, 2  , 李舜酩
, 李舜酩2 , 赵万忠2 , 沈峘2 , 江星星2 , 邱绪云1 , 王慧君1 ]
, 李舜酩, 赵万忠|
|


李爱娟(1980-),女,讲师,博士.研究方向:汽车动力学系统与控制.E-mail:liaijuan2008@gmail.com
为了能够生成适应不同道路环境的动态轨迹,在最优控制理论的基础上进行了改进,在方法中建立了包括3个常用评价指标:时间、消耗能量和距离障碍物最短距离的动态评价函数,研究了不同权重系数对轨迹特征影响的规律,进而得出了启发式权重调整规则和调整流程。仿真结果表明,本文提出的基于最优控制理论的轨迹规划方法是有效可行的,得出的权重调整方法是正确的,使用本文方法可以生成适用于不同道路环境的动态行驶轨迹,且轨迹满足多种约束条件。
, LI Shun-ming, ZHAO Wan-zhongIn order to generate feasible dynamic trajectory adapting to different road environments, the traditional trajectory generation method is improved based on the optimal control theory. The dynamic cost function is created, which includes three cost terms, time, energy, and clearance from obstacles. The influence of different weights to the trajectory features is studied, and the heuristic weight regulation rules and regulation procedure are obtained. The simulation results show that the improved trajectory generation method is feasible. The weight regulation rules and procedure are right; the optimal driving trajectory can be dynamically generated. Several constraints are obtained and the driving trajectory can adapt to different road environments.
智能车辆是智能交通系统的重要组成部分,国际上众多的研究机构及工业设计单位对其研发过程正投入大量的人力、物力,时刻关注着关键技术的研发[ 1, 2]。轨迹规划技术是车辆进行自动行驶的一项关键技术[ 3, 4]。轨迹规划的目的是要在适当的限制条件下,生成车辆运动轨迹的状态表达式,作为跟踪控制系统的控制输入[ 5]。
早期的轨迹规划方法主要是用不同的函数(例如
本文提出一种基于最优控制理论的轨迹生成方法,建立多目标动态评价函数,并通过研究评价函数中不同评价指标的权重对轨迹特征影响的规律,得出权重调整规则和调整流程,使得轨迹能够根据周围的环境进行动态调整优化,以生成最优行驶轨迹。
运用最优控制方法进行轨迹规划,其目的是求出可用的控制输入变量
式中:
对所有的
改进的最优控制方法中对消耗能量、完成时间和距离障碍物的最短距离3个评价指标函数进行优化,评价函数如式(4)所示,权重向量为
完成时间:
消耗能量:对消耗能量的表达方式进行简化,
距离障碍物的最短距离:为了使得车辆在行驶过程中不与障碍物相撞,在评价函数中设定一项评价指标 W3
式中:(x0,y0,z0)为车辆质心处的坐标。
当智能车在障碍物中心,即距离障碍物的中心为0时,补偿函数
式中:
在分析改变距离障碍物最短距离的权重对轨迹生成的影响时,不仅改变
为了对轨迹进行调整需要有不同权重对轨迹特征影响的规律做基础,为此本文采用仿真分析的方法研究权重值对不同轨迹特征的影响规律。轨迹的特征主要是连续轨迹的数字属性,在某种程度上量化所有的轨迹特征,一般是轨迹特征约束条件的最大最小值和解释整条轨迹的平均值。轨迹的特征包括与时间相关的特征(消耗能量、运行时间、最大速度和最大加速度);与距离相关的特征(距离障碍物的最短距离)等。
不同行驶区域范围和不同障碍物环境中,权重比值对与时间相关轨迹特征的影响曲线如图1 ~图3所示。其中不同权重比时,由仿真计算得出的轨迹特征值在图中用不同的点表示。
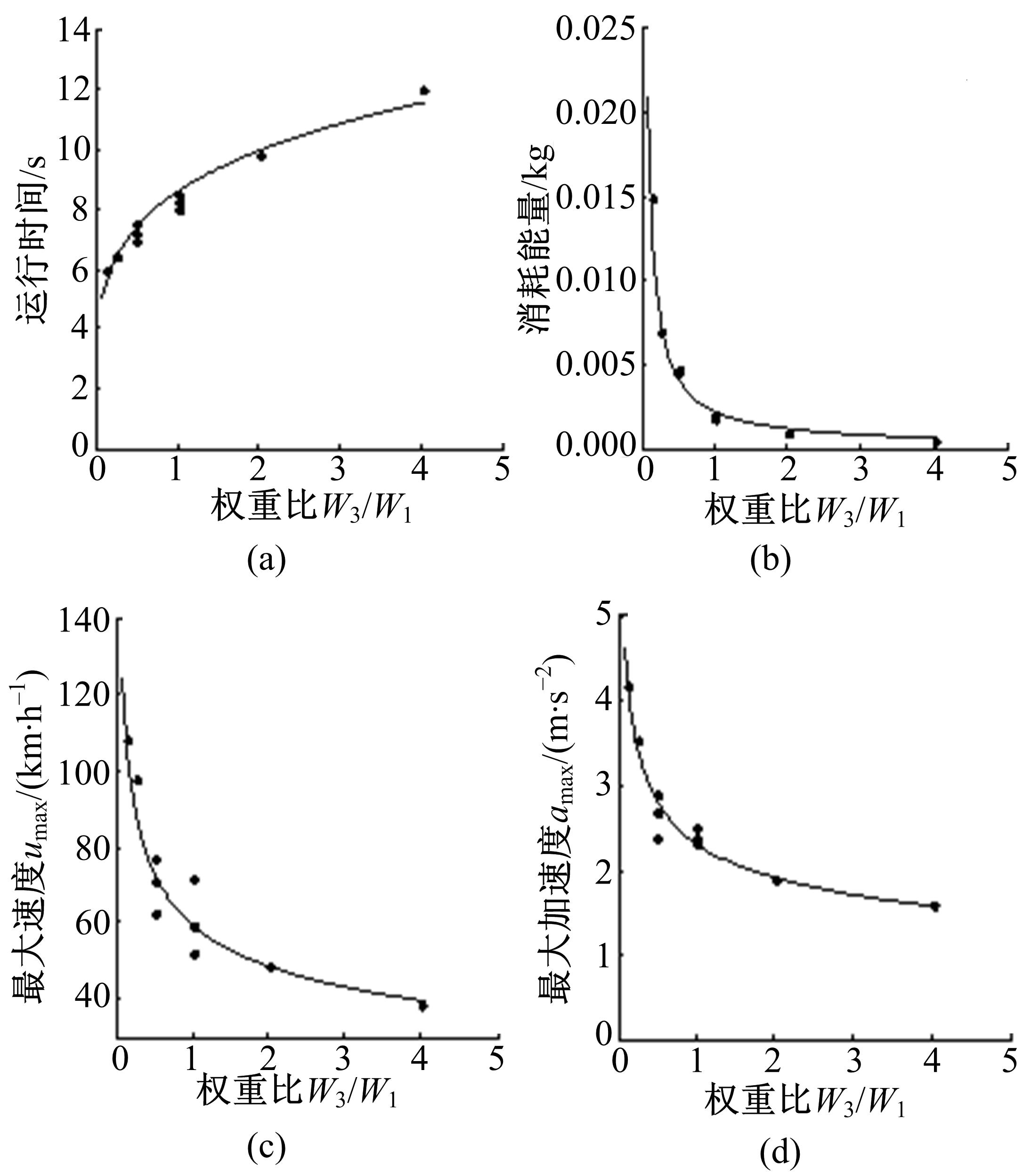
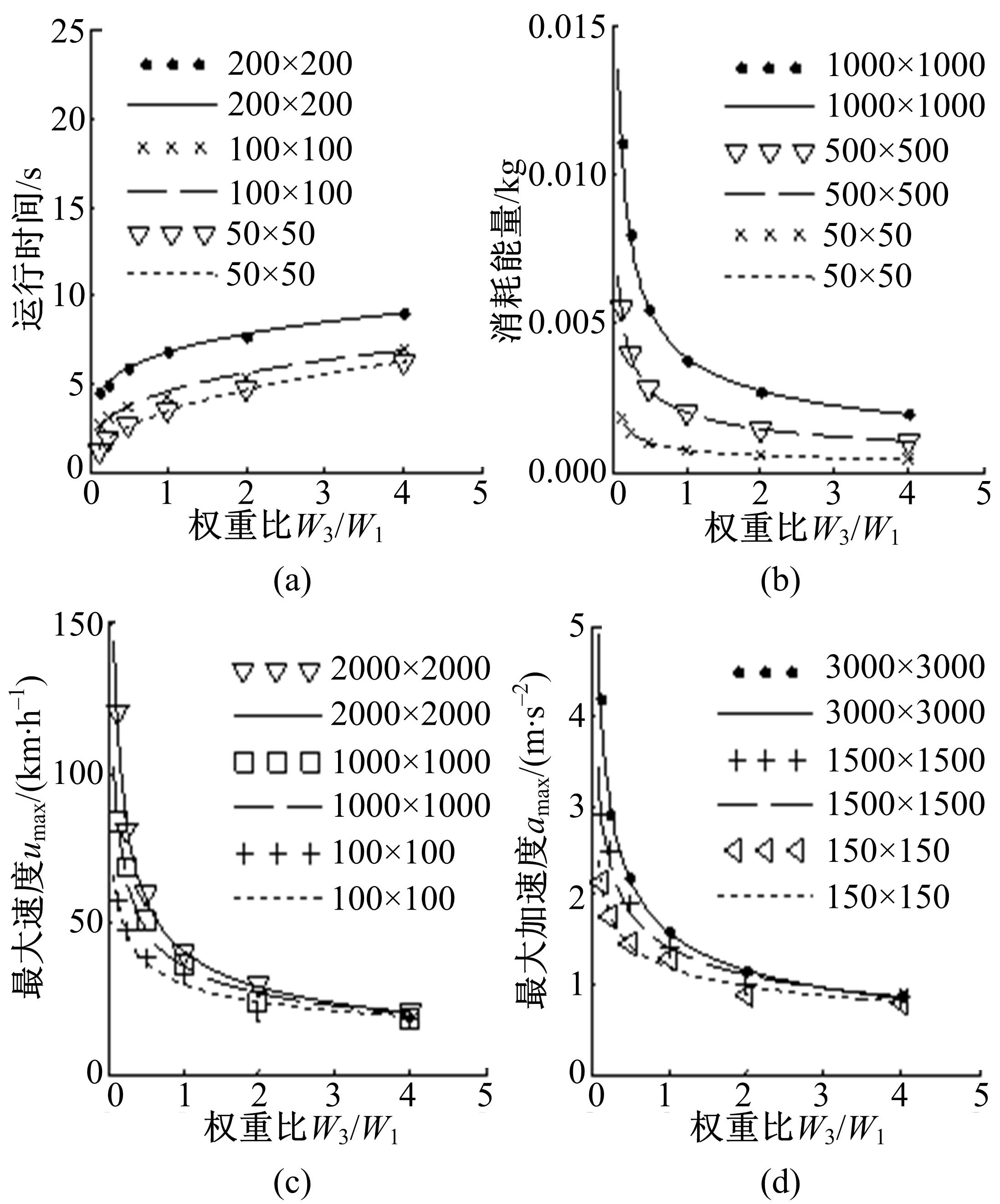 | 图1 不同区域范围内无障碍物环境中权重比 W3 /W1对时间相关轨迹特征的影响Fig.1 Influence of weight ratio W3/W1 on trajectories’ features in different region environments without obstacles |
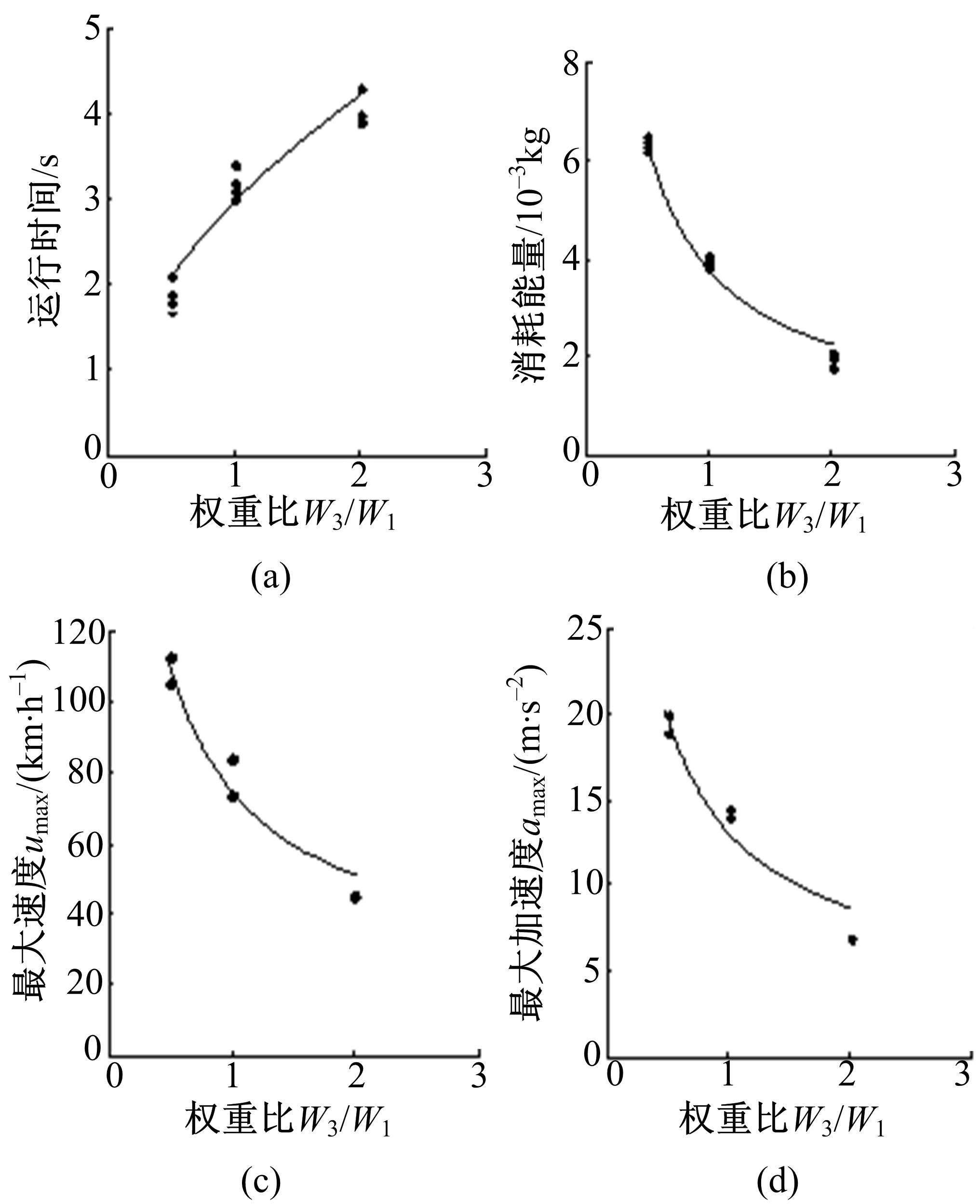 | 图2 单障碍物环境中权重比 W3/ W1对时间相关轨迹特征的影响Fig.2 Influence of weight ratio W3/ W1 on trajectories’ features of time in an obstacle enviroment |
 | 图3 多障碍物环境中权重比 W3/ W1对时间相关轨迹特征的影响Fig.3 Influence of weight ratio W3/ W1 on trajectories’ features of time in the multi-obstacle enviroment |
图1为不同区域范围无障碍物环境中权重比值对轨迹特征影响的曲线图,从图1( a)可以看出,当W3 /W1的值较小时,也就是消耗能量权重W3比时间权重W1小很多时,运行时间最短,也就是说,当把时间看作是比消耗能量重要的权重时,应该用较短的时间来完成轨迹的行驶。随着W3 /W1比值的增长,即W3和W1的值相等,然后W3的值超过W1的值,这样消耗能量的权重比时间的权重更重要,由图1( a)可以看出,轨迹运行的时间是相应增长的。图1( b)是权重比值W3 /W1对消耗能量影响的曲线图,同样当W3 /W1的值较小时,时间比消耗能量重要,所以轨迹的耗油量比较大,随着W3 /W1比值的增长,消耗能量逐渐比时间重要,轨迹消耗能量相应地减小。由图1( c)( d)可知,当W3 /W1的值较小时,时间权重比消耗能量权重更重要,所以轨迹的最大速度和最大加速度比较大,随着W3 /W1比值的增长,消耗能量权重逐渐比时间权重更重要,最大速度和最大加速度相应地降低。这与车辆如果想获得较短运行时间,需要车速和加速度高一些,而高的加速度需要消耗能量大一些的情况相对应。
图2、图3分别为单障碍物和多障碍物环境中权重比值对轨迹特征影响的曲线图。有障碍物环境和没有障碍物环境中权重比对轨迹特征的影响规律也有相似之处,当W3 /W1的值较小时,时间权重比消耗能量权重重要,运行轨迹需要的消耗能量比较大,最大速度和最大加速度比较高;随着W3 /W1比值的增长,消耗能量逐渐比时间重要,运行轨迹需要的消耗能量相应减小,最大速度和加速度相应降低,所以该影响规律可以作为对权重进行调整的有用规律。
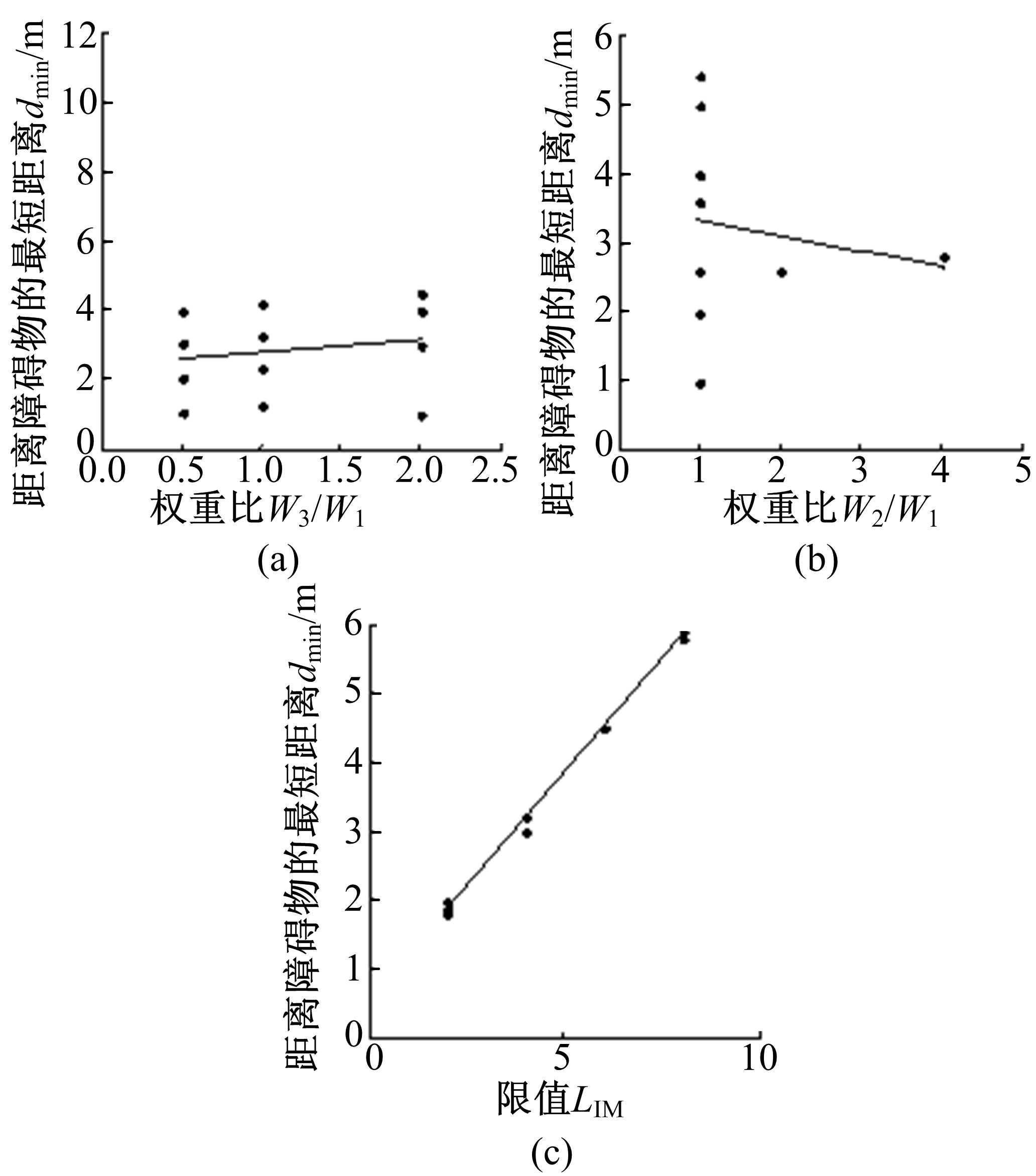 | 图4 多障碍物行驶环境中权重对距离障碍物最短距离的影响Fig.4 Influence of weight on minimum distance in the multi-obstacle enviroment |
图4为多障碍物环境中权重对距离障碍物最短距离影响的曲线图。图4( a)为L IM=3,W2 /W1 =1,W3 /W1的值在0 ~2 .5之间变化时,最短距离d min的变化曲线图;图4( b)为L IM=3,W3 /W1 =1,W2 /W1的值在1 ~5之间变化时,最短距离d min的变化曲线图;图4( c)为W1 =W2 =W3,L IM的值在1 ~7之间变化时,最短距离d min的变化曲线图。由图4可以看出,权重比W3 /W1和W2 /W1对最短距离d min的影响不大,但是限值L IM对最短距离影响较大,如果距离障碍物的最短距离约束条件不满足时,可以通过调整L IM的值来调整距离障碍物的最短距离。
通过第2节权重对轨迹特征影响规律的研究,可以得出权重调整规则的函数关系式,即通过调整权重值可以获得需要的轨迹特征值。从图1不同区域范围内无障碍物环境中权重比值对轨迹特征影响的曲线图中,可以得到不同区域范围内无障碍物环境中时间相关轨迹特征与权重比值W3 /W1的函数关系式如式(8) ~(11)所示:
式中:t f为运行时间;
从图2单障碍物环境中权重比值对与时间相关轨迹特征影响的曲线图中,可以得出时间相关轨迹特征与权重比值W3 /W1的函数关系式为:
从图3多障碍物环境中权重比值对时间相关轨迹特征影响的曲线图中,可以得出时间相关轨迹特征与权重比值W3 /W1的函数关系式为:
以运行时间这一轨迹特征为例来说明启发式权重调整规则的推导过程。从式(8) ~(13)运行时间和权重比值的函数关系式可以得出,运行时间和权重比值之间的函数关系式是幂指数形式的函数关系。式(8) ~(11)中三个区域范围幂指数的平均值是0 .31,而式(8) ~(13)中运行时间和权重比的关系式中所有幂指数的平均值是0 .33,这两种情况都可以将幂指数精确到一位小数0 .3。由此可以得出运行时间和权重比W3 /W1之间的权重调整关系式为:
式中:常系数q1可以由车辆实际行驶过程中的运行时间和W3 /W1的实际值计算出来。
用同样的方法可以得到与时间相关的轨迹特征消耗能量U、最大速度v max和最大加速度a max以及权重比W3 /W1的权重调整关系式:
其中指数
距离障碍物最短距离与限值L IM呈线性关系:
q2为常系数。式(15)(16)中的常系数q1和q2是用权重和特征值进行在线计算,系数和理想特征值被用来计算新的权重值。
三个权重W3 /W1,W2 /W1和L IM的取值并不是完全独立的,应该考虑各个权重之间的相对关系,以生成综合考虑各项评价指标的最优行驶轨迹。例如,当L IM的值降低时,轨迹可以同时获得较小的消耗能量和较短的运行时间,效果可能不明显,但是如果权重调整不能找到时间和消耗能量的最优值,则可采用改变L IM的值来获得时间和消耗能量的最优值。通过综合考虑各个评价指标可以得出如表1所示的几个主要轨迹特征运行时间、距离障碍物最短距离和消耗能量的权重进行在线调整的规则。其他与时间以及距离相关的轨迹特征,如平均速度、平均加速度等约束条件不满足时,也按照同样的权重调整进行调整。权重调整的流程图如图5所示。根据权重调整规则和流程进行权重调整可以保证各项评价指标能够综合平衡,不出现矛盾和振荡现象。
| 表1 权重调整规则 Table 1 The regulation rules of weight |
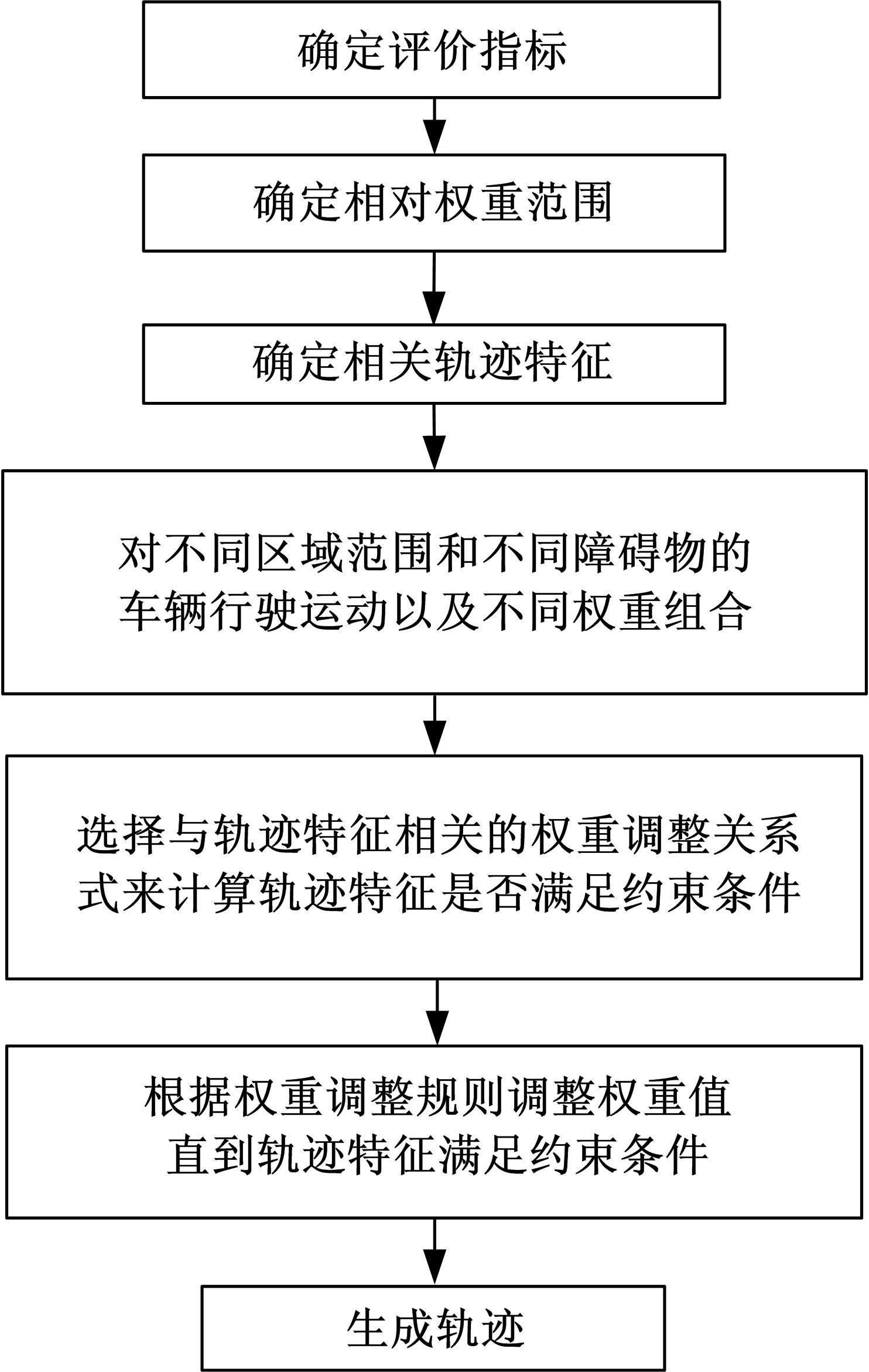 | 图5 权重调整的流程图Fig.5 Flow chart of weight regulation |
针对车辆在障碍物环境中进行避障行驶的工况,用本文提出的基于最优控制理论的方法进行轨迹生成的仿真实验,以验证本文方法的有效性和可行性。本文对某型汽车进行仿真分析,该型汽车的相关配置参数如下:轴距为2.578 m,车身总长度为4.199 m,车身总宽度为1.786 m。障碍物集合
约束集合 L0为:
用本文方法进行轨迹参数优化的计算结果如表2所示。 D0为初始估计权重以及对应的轨迹特征值, D1和 D2分别表示权重调整过程中每一步迭代计算的结果,
| 表2 用权重调整规则进行调整的迭代计算结果 Table 2 The iteration computed results using the weight regulation rules |
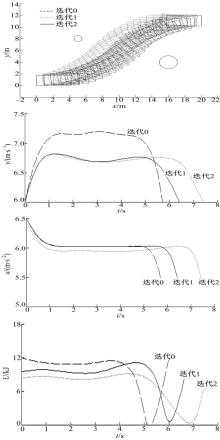
通过不同迭代生成的权重对行驶轨迹、车速、加速度和消耗能量影响的仿真结果如图6所示,由图6(a)可以看出,通过迭代计算后的权重即迭代2生成的轨迹满足 dmin>2.5 m的约束条件,而用迭代0和迭代1的权重系数生成的轨迹不满足该约束条件,所以经过迭代计算后的权重系数可以生成满足约束条件的最优轨迹。由图6(b)可以看出,用迭代0生成的权重进行规划的最高车速没有满足 umax<7.0 m/s的约束条件,迭代1和2都满足该约束条件。由图6(c)可以看出,用迭代0和1生成的权重进行规划的最大加速度没有满足 amax<6.5 m/s2的约束条件,而用迭代2生成的权重进行规划的最高加速度满足该约束条件。由图6(d)可以看出,用迭代2生成的权重进行规划的消耗能量最低,满足 U≤60 kJ的约束条件。所以,使用本文提出的基于最优控制理论的方法生成的轨迹能够满足所有的约束条件,可以生成可行的最优轨迹。
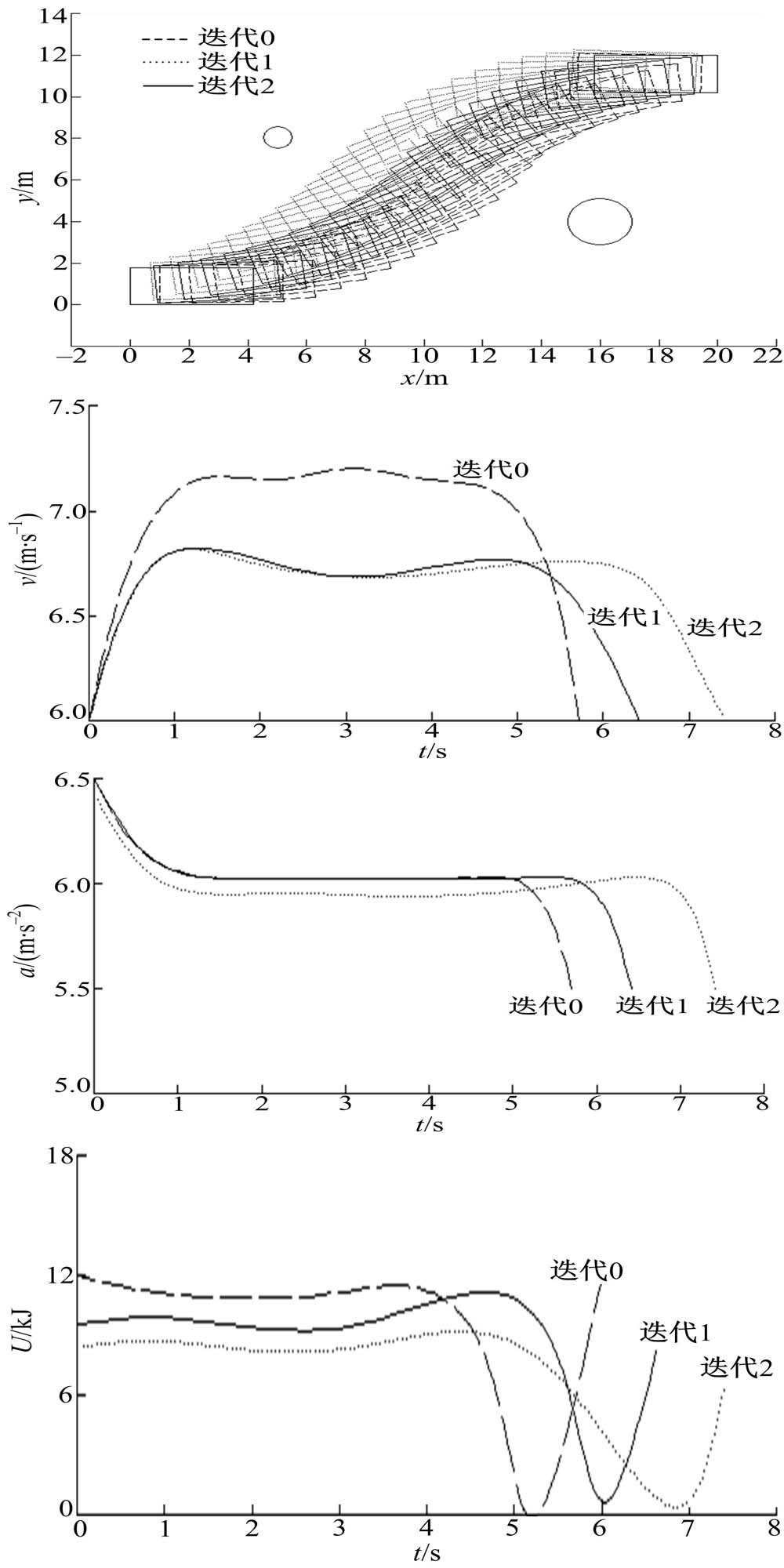 | 图6 不同迭代生成的权重对行驶轨迹、车速、加速度和消耗能量影响的仿真结果Fig.6 Simulation results of different weights on driving trajectory,velocity,acceleration and energy |
(1)应用本文方法规划的行驶轨迹具有动态适用于不同道路环境的优点,能够保证车辆在不同的障碍物环境中顺畅地沿着规划轨迹行驶。
(2)本文方法考虑车辆消耗能量约束、最大加速度约束、最大速度约束和距离障碍物的最短距离约束对轨迹规划的影响,生成可行的行驶轨迹,使得车辆能够满足具体的行驶要求。
(3)仿真结果表明:本文提出的方法有效可行,可以迭代生成满足多个非完整约束条件的最优行驶轨迹。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|