




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
欠驱动半挂汽车列车的运动建模与跟踪控制
[游峰1  , 张荣辉
, 张荣辉2 , 王海玮1 , 徐建闽1 , 温惠英1 ]
, 张荣辉, 王海玮|
|


作者简介:游峰(1977-),男,副教授,博士.研究方向:车路协同与安全控制.E-mail:youfeng77@126.com
应用车辆系统动力学理论,建立了以车辆参考坐标系和地面坐标系的欠驱动汽车列车动态模型。为了简化验算和求解过程,采用准确线性化方法对建立的系统模型进行线性化。在此基础上,针对小曲率转弯半径的车辆运行轨迹,建立了极坐标下的汽车挂车系统运动学模型,应用滑模变结构控制理论,给出了车辆系统状态变量向超平面收敛的方法。最后,对平滑运动轨迹和小曲率转弯半径的跟踪控制进行了仿真分析。仿真实验结果表明:所设计的反馈控制器能改善汽车列车对行驶路线的跟踪能力,使偏离的车辆快速返回到期望的稳态轨迹上。
The dynamic theory of vehicle system is applied to develop the nonlinear dynamic model of underactuated vehicle in the vehicle and ground coordinate system. To simplify the process of checking and solving, the proposed model is linearized using accurate linearization method. On the basis of the linearized model, the dynamic model of tractor trailer system in polar coordinate system is established for vehicle trajectory in small turning curvature. In addition, the algorithm based on variable structure sliding model control is employed to make the state vectors of the vehicle system to converge to the hyperplane. Finally, the tracking simulations for smooth trajectory and smaller turning radius trajectory are analyzed in detail. Experiment results reveal that the designed feedback controller can improve the tracking performance of the tractor semi-trailer vehicle and drive the deviated vehicle back to the desired trajectory.
半挂汽车列车具有载重量大、纵向尺寸长、整车质心高等特点,与其他公路车辆相比,其侧滑极限较低,易出现偏离行驶车道或期望路径的现象,而驾驶员位于牵引车前方的驾驶室内,很难察觉事故的发生[ 1]。半挂汽车列车是本身存在一定运动约束的一类欠驱动物理系统,即独立控制输入少于自由度的系统[ 2]。加之半挂汽车列车系统具有运输效能高、成本低等优点,因此引起汽车工业界和学术界的广泛关注。刘宏飞[ 3]应用车辆动力学原理建立汽车列车横向稳定性数学模型,研究汽车列车横向摆振产生机理,探索汽车列车使用参数和结构参数对其行驶稳定性的影响。周淑文等[ 4]分析了半挂汽车列车转向特点,建立了半挂汽车列车多体动力学模型,采用虚拟样机技术,对横摆角速度跟踪控制和防倾覆控制进行仿真。常胜等[ 5]建立四轮转向半挂汽车列车简化三自由度单轨动力学模型,在小角度转向和直线行驶两种行驶工况下对操纵稳定性能进行时域仿真研究。王云鹏等[ 6]针对运输液态危险化学品的罐式半挂汽车列车,建立了整车侧倾数学模型,通过对移线和转向典型工况下整车动力学仿真,分析了变装载条件、变车速条件下车辆发生侧翻的规律。在文献[7]中,杨秀建等分析了牵引点和挂车质心位置对半挂汽车列车横向稳定性的影响规律,采用主元特征向量分析方法探讨半挂汽车列车“折叠”和“横向摆振”发生机理。
以上研究大都建立了不同类型的汽车列车的运动学和动力学模型,为汽车列车的深入研究奠定了基础,但如何保证挂车与牵引车沿一定轨迹行驶,尤其在小曲率半径轨迹条件下预定轨迹的跟踪,仍需进一步探讨和分析。为此,本文首先针对一类欠驱动汽车挂车系统的运动展开分析,在车辆运动假设的基础上,建立了车辆的微分动力学模型用以保证车辆直线跟踪性能。为简化验算和求解过程,应用准确线性化方法对建立的系统模型进行线性化。在此基础上,针对在小曲率半径情况下,欠驱动汽车挂车系统的侧滑极限降低[ 8],侧滑概率进一步增加的情况建立极坐标下的系统运动学模型。最后应用基于滑模变结构方法设计了欠驱动汽车挂车系统的跟踪控制算法,通过仿真试验手段分析和验证了控制算法的有效性和实时性。
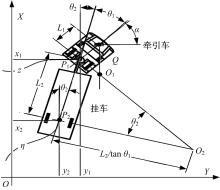
建立如图1所示的坐标系统[ 3],其中
 | 图1 欠驱动汽车挂车运动模型Fig.1 Dynamics model of tractor semi-trailer vehicle with characteristics of underactuated system |
| 表1 欠驱动汽车挂车建模参数的定义 Table 1 Parameter definition of tractor semi-trailer vehicle |
假定欠驱动汽车的牵引车辆和挂车运行在同一个平面;车辆低速运行,车轮未发生侧滑。为便于研究,牵引车采用简化的三轮车模型,如图1所示。牵引车与挂车的铰接点为
分析上述各式可知,式(1)描述了牵引车辆的运动特性;式(2)(3)(4)代表挂车的运动特性;式(5)为牵引车和挂车间运行轨迹的关系。
引入新的时间函数
式中:
如果
结合式(1)~(5)整理有:
Su[ 9]和Krener[ 10]提出非线性系统准确线性化的方法,本文借鉴相关方法对欠驱动汽车挂车运动展开研究,并基于此设计相应的轨迹跟踪控制器。对于描述非线性系统的状态方程:
设法找到一个坐标变换和非线性反馈:
结合式(8)(9)可得到一个新的状态方程:
整理后有:
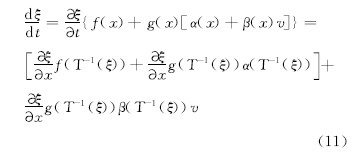
如果这个系统是线性的,即:
则式(7)描述的系统被转化成线性系统。而跟踪控制器可应用传统的线性控制理论来进行设计。由此可知,只要坐标变换式(8)和非线性反馈式(9)存在,就可以寻找到一个控制器,使得系统在初始状态的小范围内和大范围内都能保证系统的闭环稳定性。
为建立状态方程分析汽车挂车系统,本文引入新的状态变量和状态反馈:
式中:
将
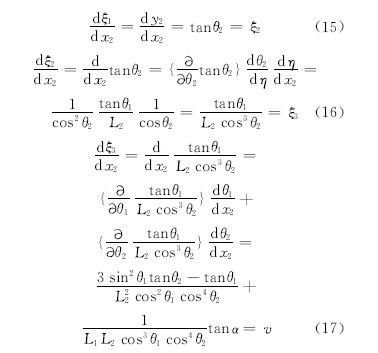
将式(15)(16)(17)重写,用如下状态方程表示为:
应用控制原理[ 11]可以设计如下反馈控制器:
根据式(13)(14)计算出牵引车前轮转角
分析式(21)可以得出以下结论:牵引车前轮转角
在小曲率半径条件下,即
如图2所示,将小曲率半径的运行路径用圆形近似代替,文中选用极坐标
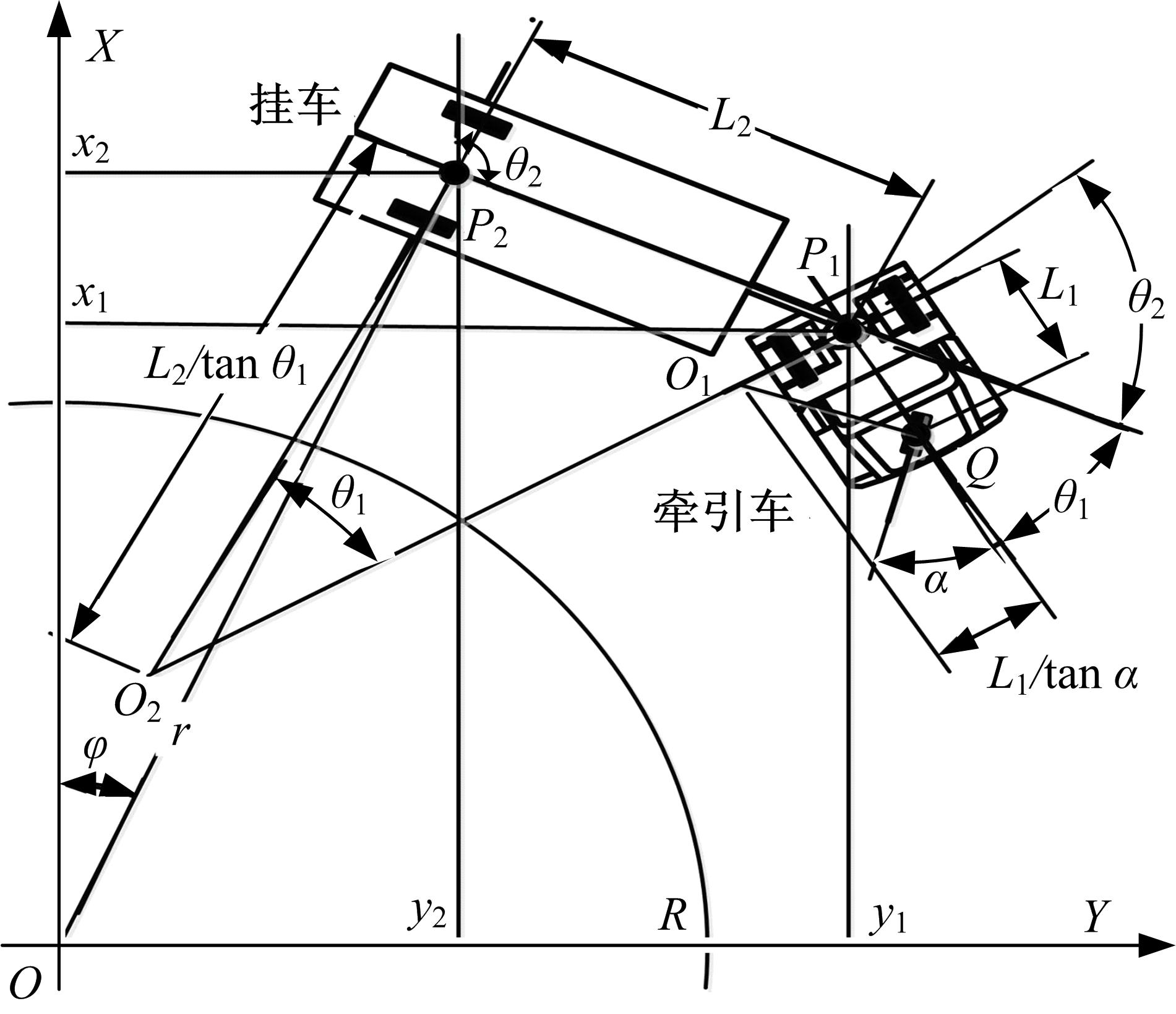 | 图2 小曲率转弯半径的欠驱动汽车挂车运动模型Fig.2 Dynamic model of the vehicle in small turning radius of curvature |
新的时间函数
本文引入新的状态变量和状态反馈:
令
设计一个控制器,当汽车挂车向前行进时,选用的时间函数
欠驱动汽车挂车系统具有明显的非线性特性,而前述的准确线性化方法为应用反馈线性化控制算法提供了基础。本文采用基于滑模变结构[ 13, 14]的方法设计欠驱动汽车挂车系统的跟踪控制算法。
设有线性时不变系统:
式中:
系统对应的切换超平面为:
假设输入矩阵可分解为:
式中:
选择坐标变换:
式中:
由此,可以得到下列规范系统的表达形式:
为求出汽车挂车系统进入滑模状态后变动最小的切换超平面,给出如下的最优评价函数:
式中:
此时,式(38)可改写为:
取
式中:
为使欠驱动汽车挂车系统状态从超平面之外向超平面收敛,并保持在该平面上,文中应用加速度型达到律改善收敛的动态品质,其优良特性表现为当系统状态远离滑模超平面时,状态收敛速度快,从而缩短收敛时间;而当状态靠近滑模超平面时,收敛速度变慢,减少控制系统的振荡。加速度型达到率[ 15]的表达式为:
由于
为验证文中提出的滑模变结构控制算法的有效性,在Matlab\Simulink环境,结合Adams软件,建立如图3所示的仿真场景,对参考轨迹进行了计算机仿真跟踪实验。车辆相关参数选用一汽生产的解放牌CA9400CCY型仓栅式半挂车。
 | 图3 基于Matlab/Adams的仿真软件Fig.3 Simulation software based on Matlab/Adams platform |
系统响应的速度和平稳性对于欠驱动汽车挂车控制系统而言都是至关重要的,故加权矩阵的选取要在兼顾系统响应速度的同时,还应考虑系统收敛的平稳性,使系统高速收敛、低振荡。结合式(41),选取
图4为系统的状态变量
 | 图4 ξ1、 ξ2、 ξ3在 s平面上随 p变化的轨迹Fig.4 Trajectory of ξ1、 ξ2、 ξ3 with the changing of p in s plane |
在平滑运动轨迹情况下,本文针对一类欠驱动汽车挂车系统进行仿真分析,仿真初始参数如下:
从图5的仿真曲线可知,准确线性化系统的状态变量经过较短时间均收敛到0,由此可见设计的控制器可对平滑运动轨迹进行跟踪。
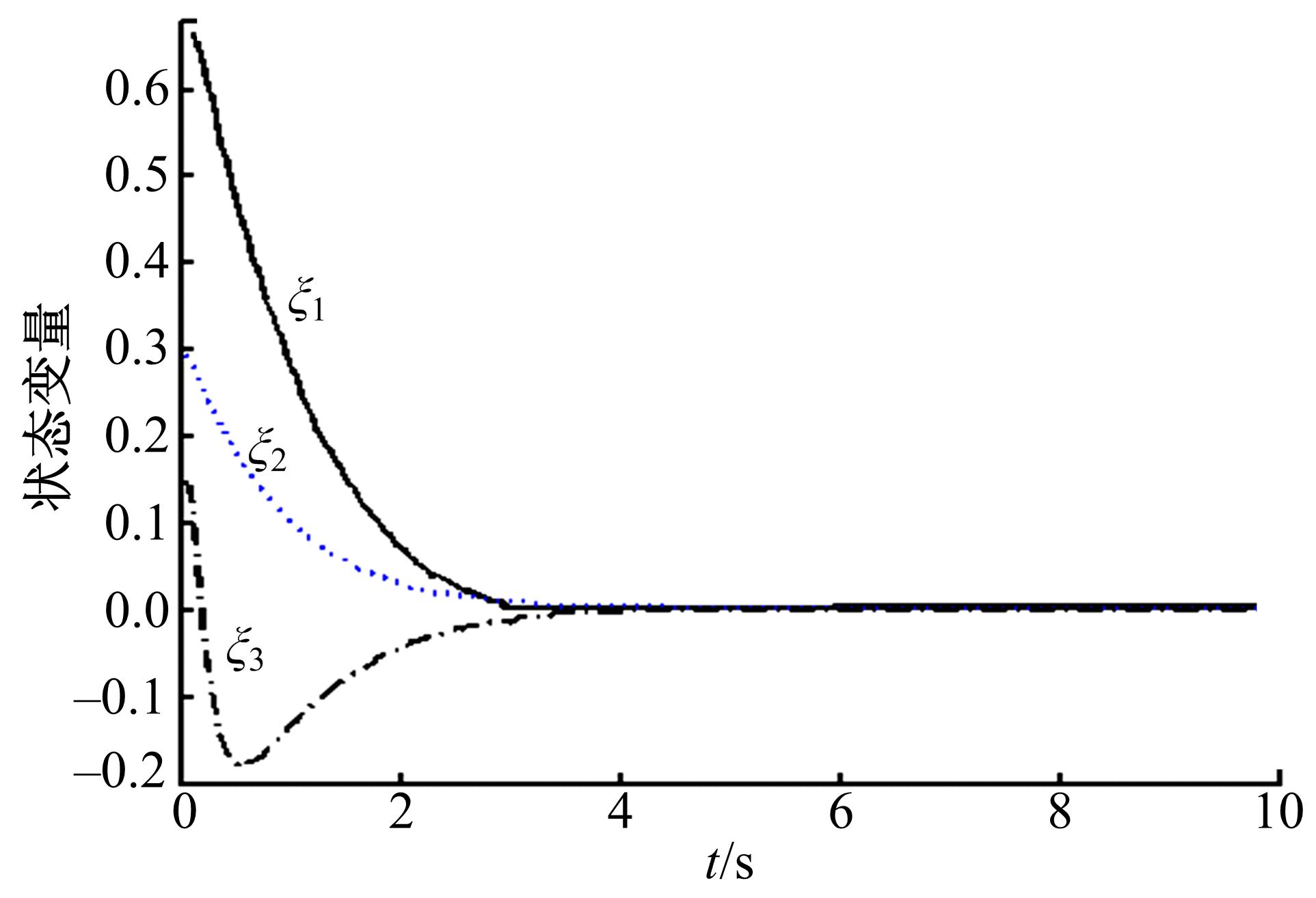 | 图5 平滑运动轨迹的跟踪控制仿真图Fig.5 Simulation figure of tracking control for smooth trajectory |
在小曲率半径轨迹条件下进行仿真分析的初始参数如下:
从图6的仿真曲线可知,准确线性化系统的状态变量经过较短时间均收敛到
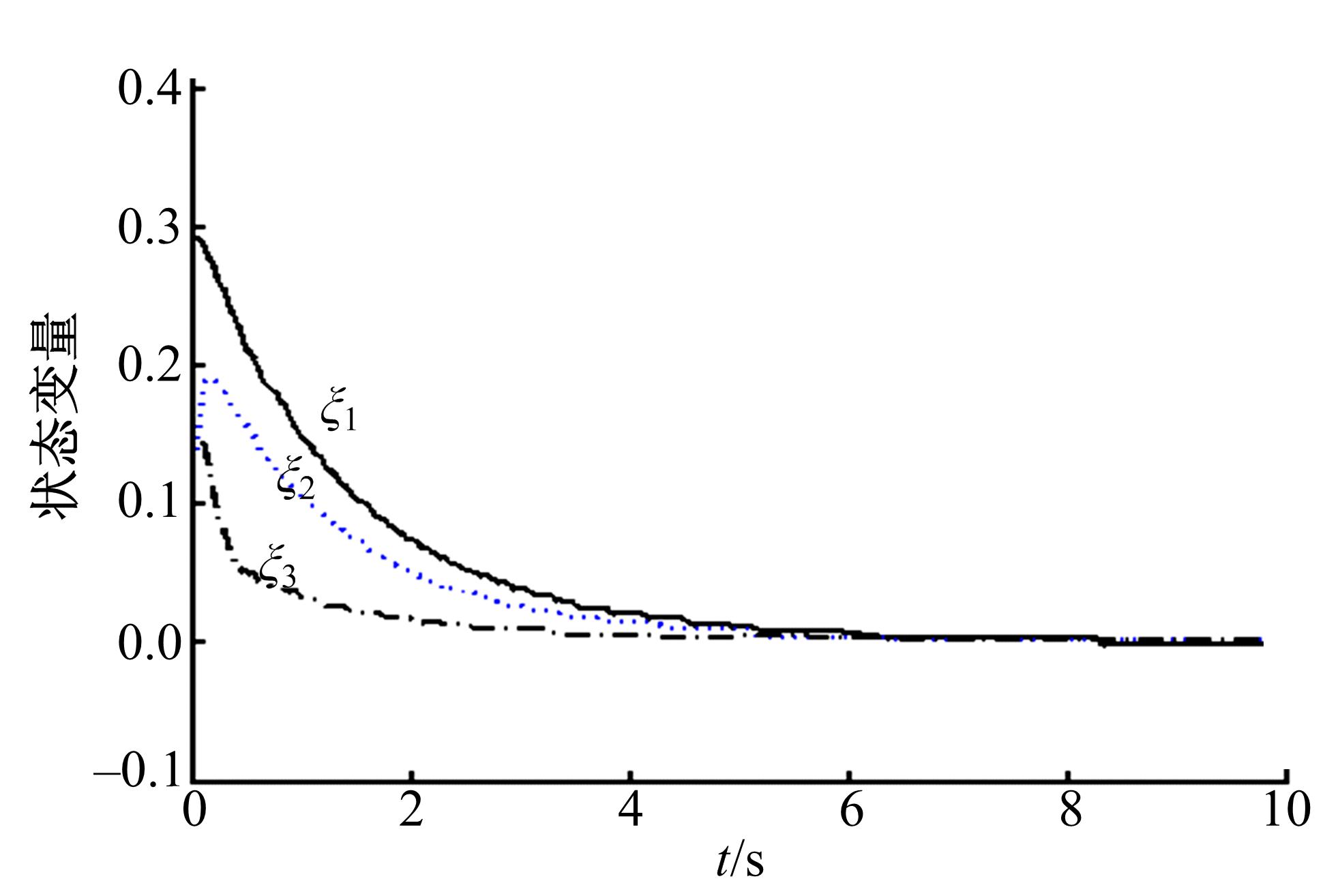 | 图6 小曲率转弯半径轨迹的跟踪控制仿真图Fig.6 Simulation figure of tracking control for small turning radius |
应用非线性动力学相关理论,对欠驱动汽车挂车系统动态机制和规律进行了分析,旨在为系统跟踪预定的路径和稳定性控制提供依据。针对一类欠驱动汽车挂车系统的运动特性展开分析,在车辆运动假设的基础上,建立了车辆的微分动力学模型。为简化验算和求解过程,应用准确线性化方法对建立的系统模型进行线性化。由于在小曲率半径条件下,一类欠驱动汽车挂车系统的侧滑极限降低,侧滑概率进一步增加,针对该种情况本文建立了极坐标下的系统运动学模型。应用基于滑模变结构方法设计一类欠驱动汽车挂车系统的跟踪控制算法,实验仿真分析验证了控制算法的有效性和实时性。本文为便于研究,忽略了轮胎侧滑特性的问题,在后续的研究中将结合轮胎的非线性模型进行半挂汽车列车跟踪控制的研究。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|