



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于多种步态的德国牧羊犬足-地接触分析
[钱志辉1  , 苗怀彬
, 苗怀彬1 , 商震2 , 任露泉1 ]
, 苗怀彬]
|
|


作者简介:钱志辉(1981-),男,副教授,博士.研究方向:生物力学及工程仿生.E-mail:zhqian@jlu.edu.cn
以德国牧羊犬为研究对象,测试其在常速行走、对角小跑、跳跃3种步态下的足-地接触作用特征,通过分析犬右前足的垂直地反力、足底动态压力分布特征和模式得出:试验范围内,犬右前足的垂直地反力峰值由其体重的0.69倍(常速行走)增长到其体重的1.43倍(跳跃);随着足-地接触冲击力的增大,犬右前足的主要着地区域和主要承力点产生了适应性变化和调整,由常速行走的足外侧(第四指、第五指)逐渐调整为跳跃状态下的足中部(第三指、第四指)和掌垫区域,这种适应性调整有利于其足部缓冲储能功能的发挥。
The foot-ground contact biomechanics of German Shepherd Dog (GSD) in normal walking, trotting and jumping gaits were investigated using a pressure plate system. The peak of the vertical ground reaction force and the dynamic foot pressure distribution on the paw pad of right-forefoot was measured and analyzed. It was found that the peak ground reaction force acting on the forefoot was about 0.69 times of the weight of GSD in walking gait; while in jumping gait, the reaction force increased to 1.43 times of weight of GSD. Meantime, along with the increase in the vertical foot-ground impact force, GSD made adjustment of its foot contact region for force bearing. In walking gait, the contact region was the 4th and 5th toes, and in jumping gait the contact region was shifted to the 3rd, 4th toes and metacarpal. Such adjustment is of great benefit to cushion and impact energy absorption.
按步行足数目,步行机器人可划分为单足、双足、三足、四足、六足、八足甚至更多,其中偶数占绝大多数。而四足步行机器人相比其他类型,具有承载能力强、稳定性好、结构简单、易于控制等显著特点[ 1]。另外,四足机器人不仅能够以静态步行方式实现在复杂地形上的行走,还可以动态步行方式实现高速行走,因而在世界范围内得到极大关注,成为仿生机器人领域的研究热点[ 2, 3, 4]。
四足步行机器人在动态快速步行状态下,由于腿机构和关节的刚性,使得其腿足与地面接触时,不可避免地会产生阶跃式的接触冲击。研究表明,机器人的脚与地面接触时造成的冲击,往往会对机器人系统造成严重损伤[ 5]。因此,四足步行机器人腿-足的接触力冲击问题已经成为国内外广泛关注的问题。
在机器人运行过程中,其足掌与地面的接触冲击主要由质量、刚度、阻尼、触地时间历程和落地时各组件的速度等因素决定,由于其质量、摆动速度和步行速度相对固定,因此通过减少机器人的质量或降低摆动速度和步行速度的方法来减少接触冲击比较困难[ 5]。自然界的四足动物在漫长的进化历程中,为适应外界环境,其自身在身体组织结构、运动模式等方面趋于优化,形成了卓有成效的导航、识别和能量转换等近乎完美的生命体系[ 6]。研究者们[ 7, 8, 9, 10]受动物腿部肌肉缓冲储能功能的启发,采取在步行机器人的腿机构中加入弹性阻尼元件或采用高弹性材料,以在一定程度上减少其与地面接触时的冲击影响。
在运动过程中,足部作为动物体与地面相接触的唯一部位,其着地时,由于动力要素的突然变化会导致足部瞬时承受几倍于其体重的冲击力[ 11],足部需要有效地缓冲并调节其与地接触状态来稳定运动[ 12, 13],展现了较好的缓冲功能。目前,研究者以犬为生物原型,研究了其足部组织材料特性的影响,如足垫的黏弹性[ 14],以及在小跑运动中,犬的足与地的作用力情况[ 15, 16]。但是,对于多种运动步态下的犬足-地接触规律的报道尚少见。本文以德国牧羊犬为研究对象,测试其在常速行走、对角小跑、跳跃3种步态下的足-地接触作用特征,包括垂直地反力、足底动态压力分布特点和模式,分析了犬足部对冲击作用进行调整和适应的规律,为具备较佳缓冲性能的仿生足的设计提供了一定的试验和理论基础。
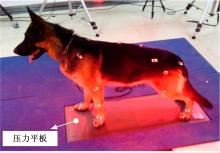
试验对象为德国牧羊犬。它的步态敏捷轻快,在动态运动中展现了较好的缓冲特性,并且聪敏,听从指挥。受试犬无任何下肢疾病、外伤或手术史,如 图1所示。数量:3条。试验对象的详细信息如 表1所示。
 | 图1 德国牧羊犬及压力平板Fig.1 German shepherd dog(GSD)and pressure plate |
试验设备采用比利时高频压力平板测试系统RSscan,如 图1所示。该平板系统采用金属压阻式传感器,可对接触面之间的压力分布进行动态测量,并以直观、形象的二维、三维彩色图形显示压力分布的轮廓和数值。试验中,系统的采样频率设定为250 Hz。
| 表1 试验对象信息表 Table 1 Subjects’ information |
测试方案和测试过程:在进行动态测试之前,受试犬需静止站立于压力测试平板上进行静态标定及测试区域选择。对于同一受试犬,进行一次标定后可采集其在多种运动模式下的足底压力数据,更换受试对象后,则需要重复该静态标定过程,再进行相应受试犬的数据采集。之后,由驯犬员施令,受试犬分别做常速行走、对角小跑和跳跃3种运动。其中对角小跑是陆地上四足动物在奔跑时优先采用的步态,同时地面冲击作用也比较显著。跳跃运动则通过使犬跨越0.5 m的障碍来实现。测试过程中,对同一只受试犬在同一种运动模式下的足底压力进行多次采集,确保其中至少6次数据质量较好。
研究表明,德国牧羊犬在运动过程中,其前肢、后肢受到的最大垂直地反力分别占到了体重的63%和37%左右,由此犬前肢承受地面冲击作用(垂直地面方向)更显著[ 15, 16]。因此,本文侧重分析受试犬的右前足在3种不同运动模式下与地面的接触作用规律和特征。
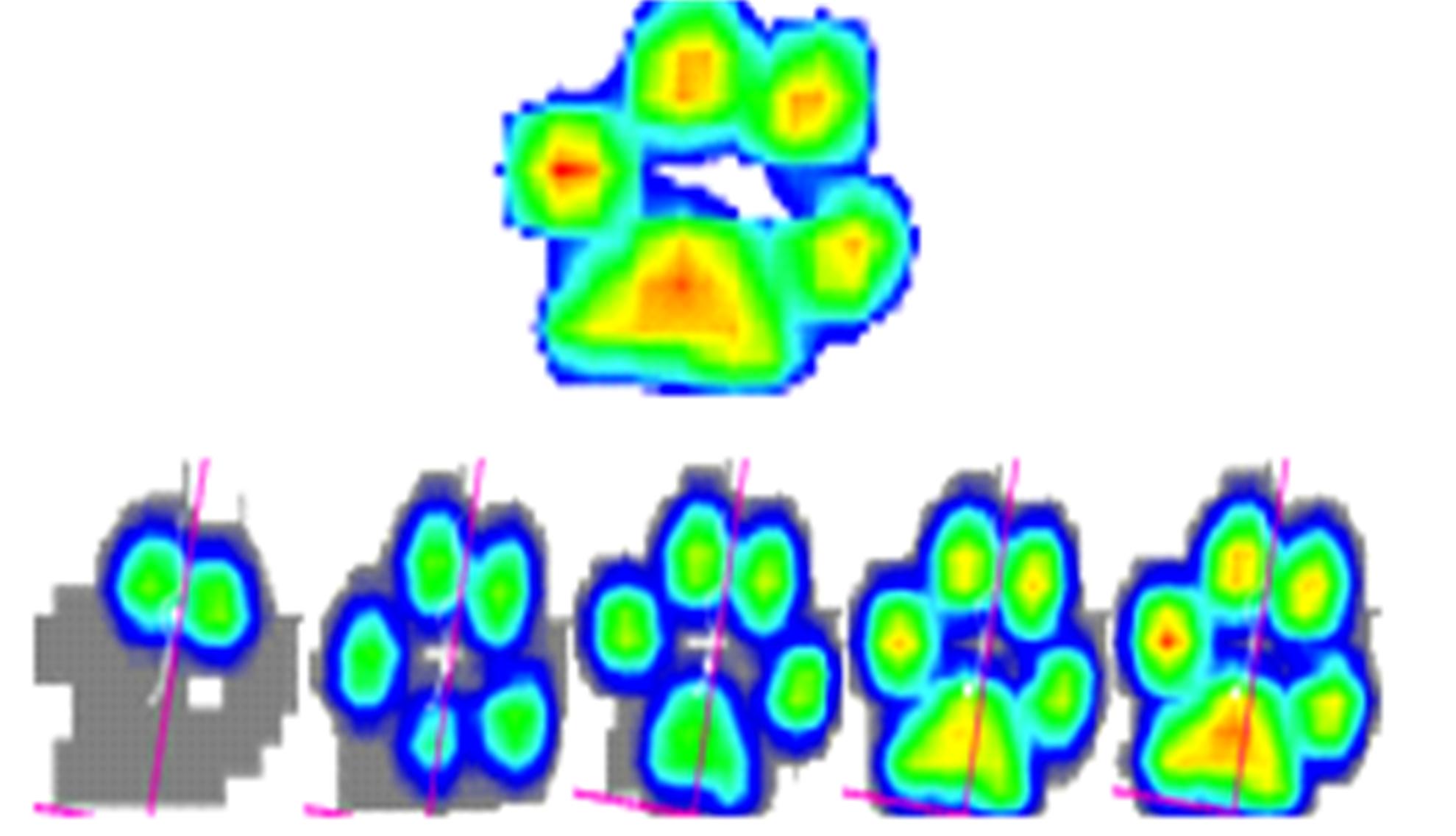
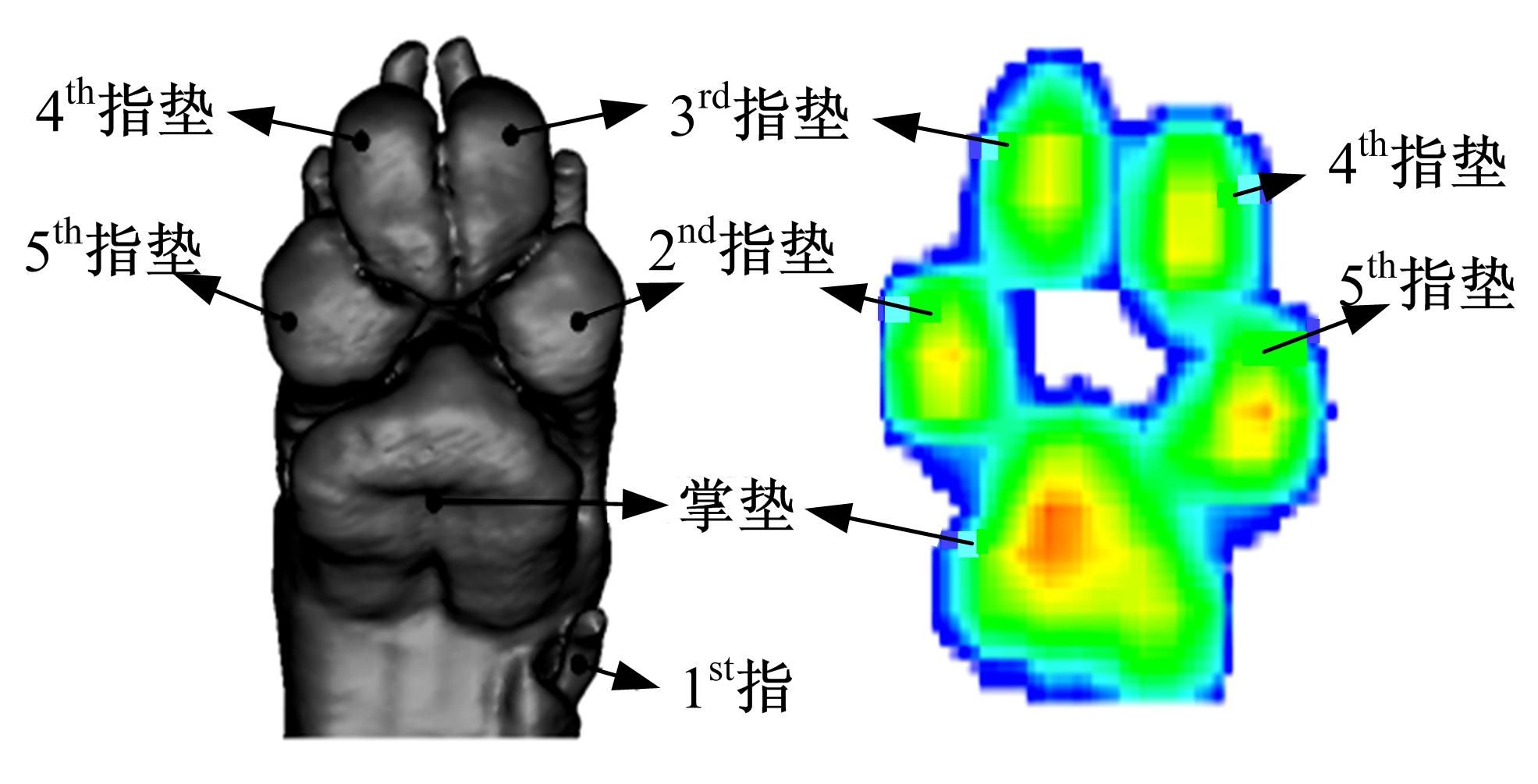 | 图2 德国牧羊犬的爪垫分区及压力分布Fig.2 Paw pad of GSD and pressure distribution |
德国牧羊犬的前肢爪垫分为5个区域分别为掌垫、第二指指垫(2nd)、第三指指垫(3rd)、第四指指垫(4th)和第五指指垫(5th),如 图2所示。相应5个区域与地面接触作用的压力分布如 图2所示。针对每种运动模式,分别选择每只犬的6次试验数据进行其足底压力各区域峰值力和峰值压力统计如 表2~ 表4所示,并作如下分析。
| 表2 常速行走状态的犬足底各区域峰值力和峰值压力 Table 2 Peak vertical ground reaction force and peak pressure of fore-foot of GSD in normal walking |
| 表3 对角小跑状态的犬足底各区域峰值力和峰值压力 Table 3 Peak vertical ground reaction force and peak pressure of fore-foot of GSD in trotting |
| 表4 跳跃状态的犬足底各区域峰值力和峰值压力 Table 4 Peak vertical ground reaction force and peak pressure of fore-foot of GSD in jumping |
在常速行走运动状态下,德国牧羊犬有三条腿与地面接触。试验范围内,三只受试犬的右前足整体的垂直地反力峰值比较如 图3所示。由 图3可知,三只德国牧羊犬在常速行走运动中,其右前足的垂直地反力峰值分别占其体重的(72.1±5.3)%、(70.9±11.7)%和(64.3±6.1)%。在此运动状态下,犬右前足着地过程中,足底第四指指垫、第五指指垫、掌垫、第三指指垫及第二指指垫各区域先后依次与地面发生作用,如 图4所示。结合 表2可知,此时各分区受到与地面垂直方向作用的峰值力按照从大到小排序为:
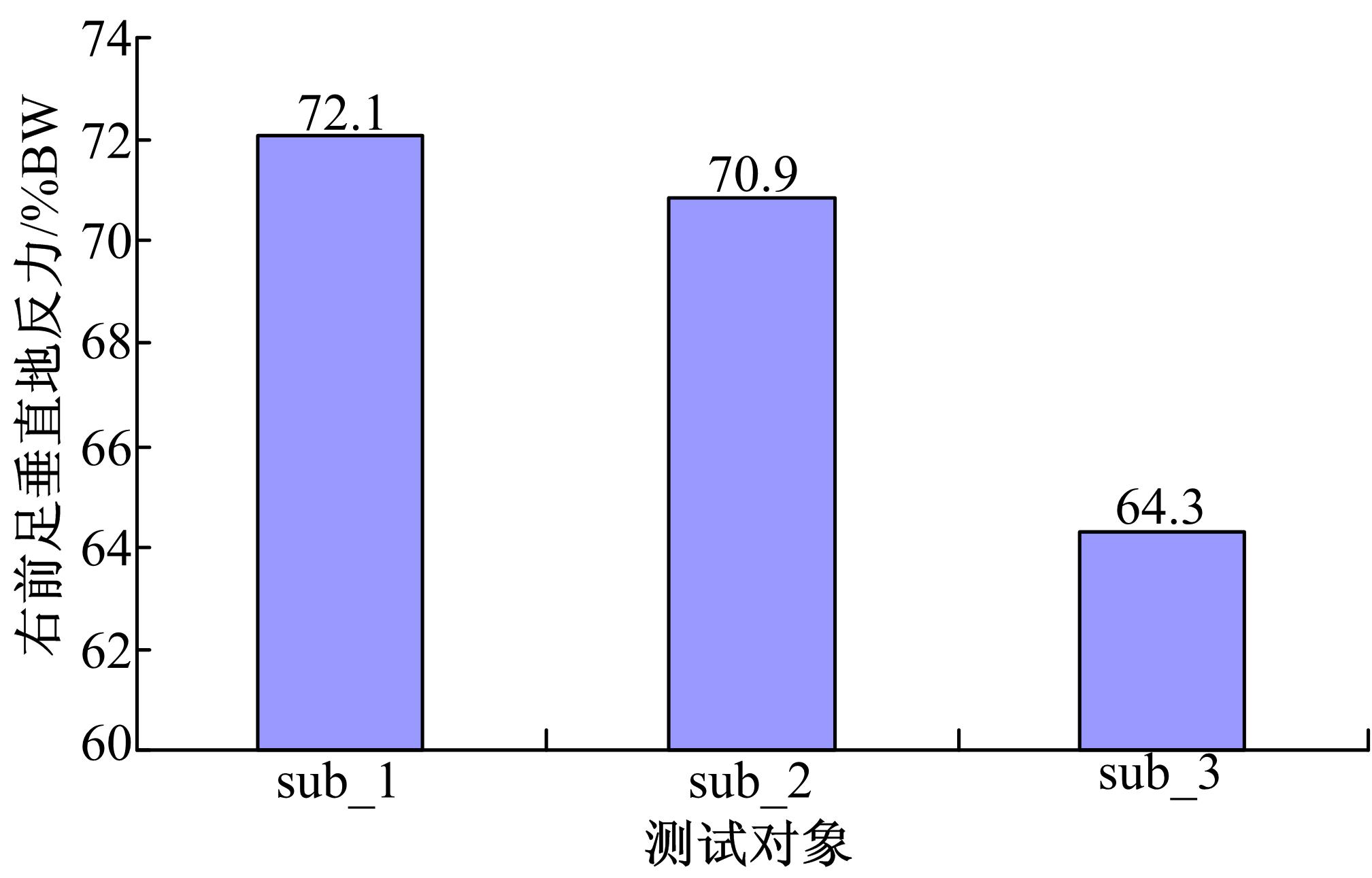 | 图3 常速行走下的犬右前足的垂直地反力Fig.3 Vertical ground reaction force of rightfore-foot of GSD in normal walking |
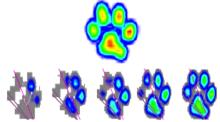
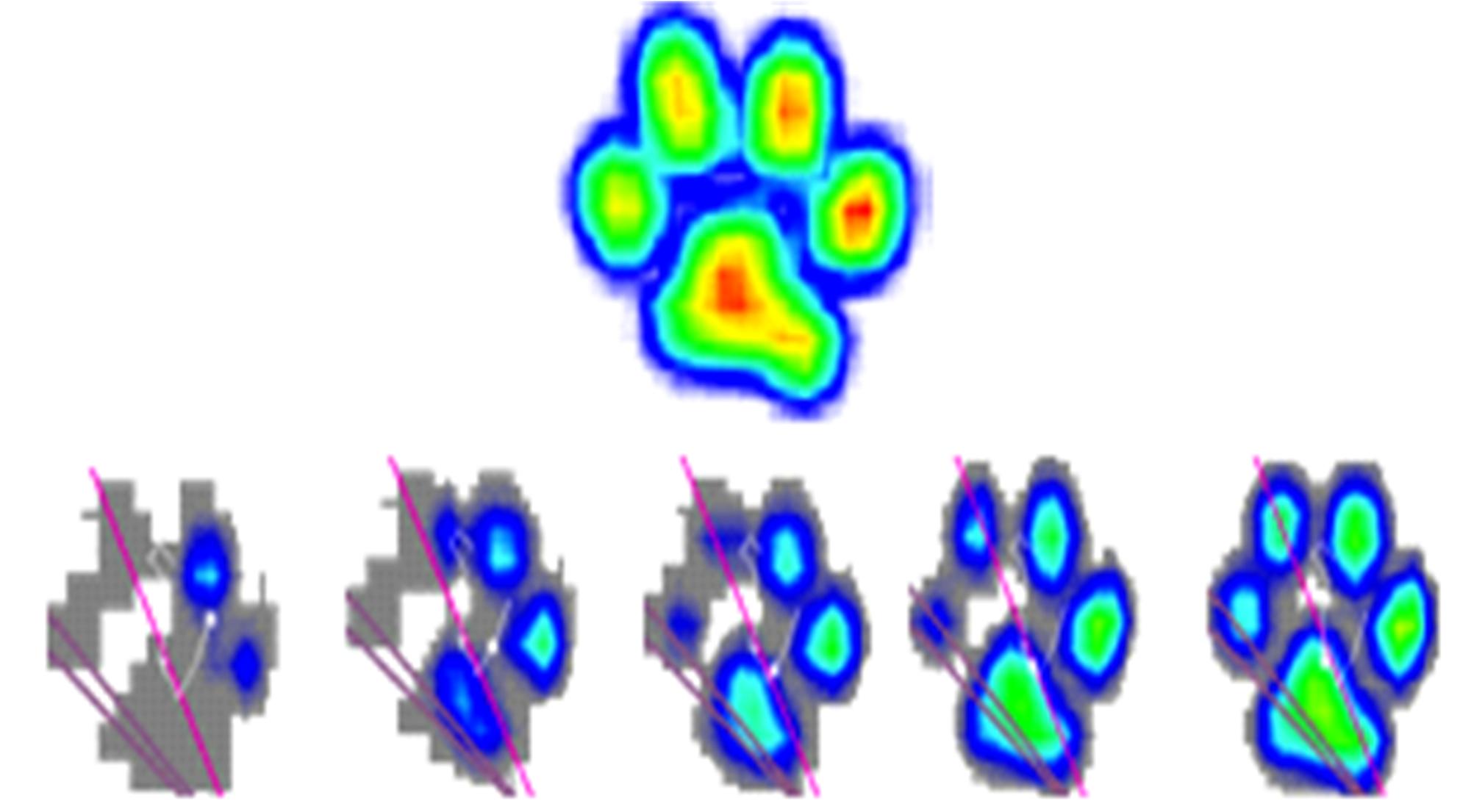 | 图4 常速行走下的犬足底压力分布Fig.4 Foot pressure distribution of GSD in normal walking |
对角小跑运动是陆地上四足动物在奔跑时优先采用的步态,此时其两对对角足交替构成支撑相。试验范围内,三只德国牧羊犬右前足整体的垂直地反力峰值分别占到其体重的(97.9±12.7)%、(102±6.9)%和(99.1±7.7)%,如 图5所示,约与犬的体重相当,故其足部受到的地面冲击作用力相比常速行走运动进一步增大。同时,其足底各分区与地接触顺序改变为第四指指垫、第五指指垫、第三指指垫和掌垫几乎同时与地发生接触,第二指指垫随其后,如 图6所示。由 表3知,犬足底各分区的峰值力按照从大到小排序为:
 | 图5 对角小跑运动下的犬右前足的垂直地反力Fig.5 Vertical ground reaction force of right fore-foot of GSD in trotting |
 | 图6 对角小跑运动下的犬足底压力分布Fig.6 Foot pressure distribution of GSD in trotting |
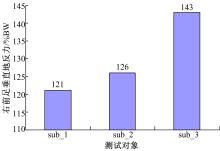
在跳跃运动状态下,犬的前肢首先触地(或左或右),本文选取了犬的右前肢首先触地的测试数据进行分析。在该运动状态下,受试犬右前足的垂直地反力峰值分别占其体重的(121±5.3)%、(126.4±4.9)%和(142.9±4)%,如 图7所示,即约为犬体重的1.21~1.43倍,冲击作用显著增强。此时,犬足底各区域与地接触顺序依次为:第三、四指同时,第五指、第二指、掌垫稍随其后,如 图8所示。
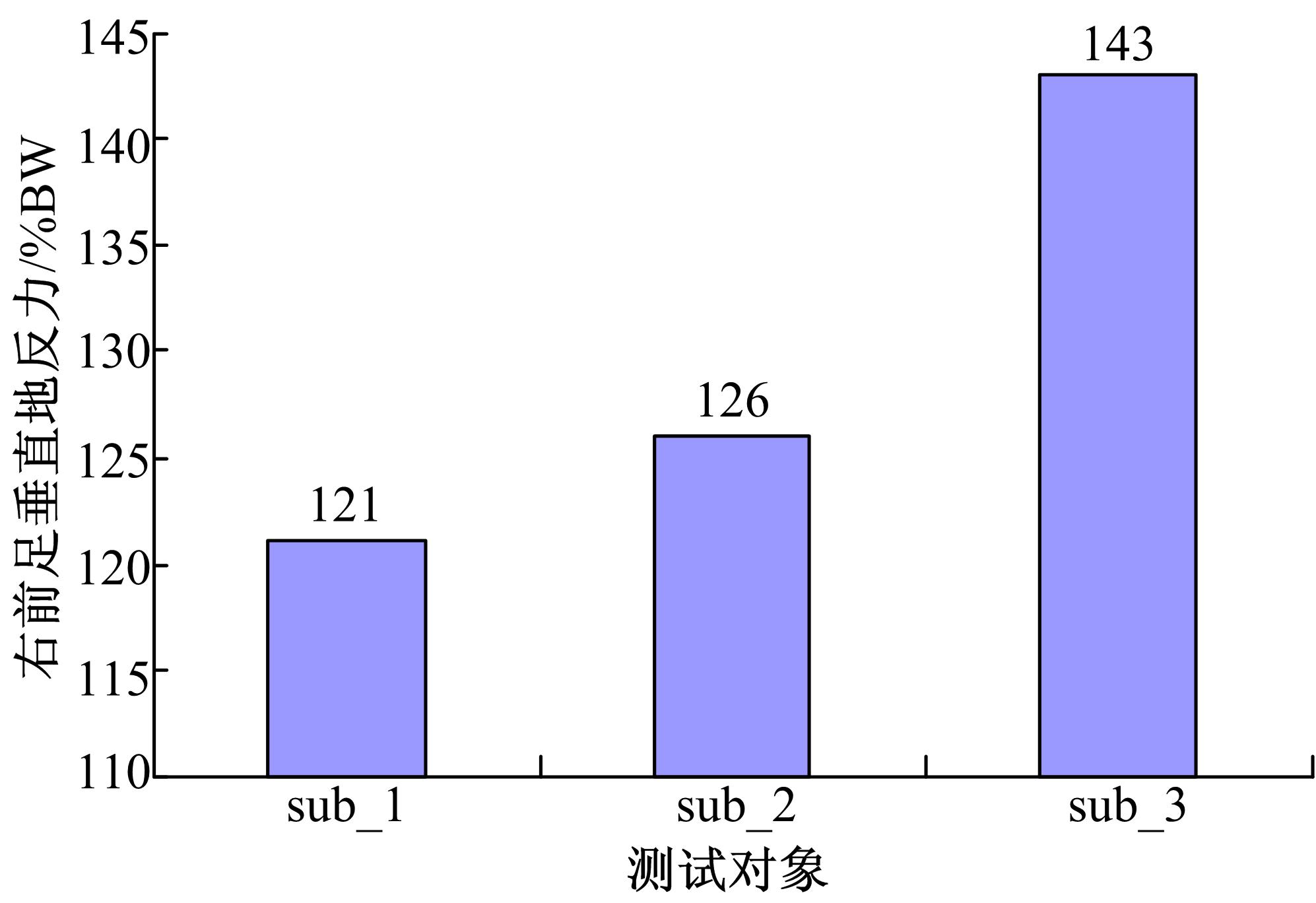 | 图7 跳跃运动下的犬右前足的垂直地反力Fig.7 Vertical ground reaction force of right fore-foot of GSD in jumping |
结合 表3可知,各分区的峰值力按照从大到小排序为: F掌垫、
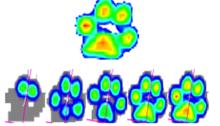
 | 图8 跳跃运动下的犬足底压力分布Fig.8 Foot pressure distribution of GSD in jumping |
综上分析可知,试验范围内,在常速行走、对角小跑、跳跃3种运动状态下,受试犬右前足-地作用的垂直地反力峰值显著增大,最高达到犬体重的1.43倍,冲击作用明显;随着冲击作用的增强,犬对其右前足各分区的着地顺序及主要承力点进行了调整,由常速行走的足外侧(第四指、第五指)着地(主要承力)逐渐调整为跳跃状态下的足中部(第三指、第四指)偏内侧,同时掌垫的作用在此过程中亦随之增长,并在跳跃运动时成为主要承力点。受试犬的这种适应性调整有利于其足部对垂直地反力的吸收及缓解。因为犬的足垫(包括掌垫和指垫)为黏弹性材料,而掌垫相比指垫,其体积及与地接触面积更大,故能吸收和损耗更多的冲击能量;另外,第三指、第四指处的骨骼结构相比其他几指,其弓形特征更明显,有利于发挥类似于人的足弓的作用,从而进一步储能。
以德国牧羊犬为研究对象,测试其在常速行走、对角小跑、跳跃3种步态下的足-地接触作用特征,通过分析犬的右前足足底垂直地反力、动态足底压力分布特征和模式得出:试验范围内,随着地面接触冲击力的增强,犬右前足的主要着地区域和主要承力点产生了适应性变化和调整,由常速行走的足外侧主要承力逐渐调整为跳跃状态下的足中部偏内侧和掌垫区域,这种功能性调整有利于其足部缓冲储能。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|