
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于故障在线估计的可重构机械臂分散容错控制
[赵博1, 3  , 李成浩
, 李成浩2, 3 , 李元春1, 3 ]
, 李成浩]
|
|


作者简介:赵博(1987-),男,博士研究生.研究方向:智能机械与机器人控制.E-mail:zhaob09@mails.jlu.edu.cn
为了降低可重构机械臂模块关节执行器和传感器故障对其控制性能的影响,提出了一种基于故障在线估计的分散容错控制方法。基于可重构机械臂的模块化属性和Lyapunov稳定性理论,设计了分散自适应滑模观测器以实现执行器和传感器故障的在线自适应估计。同时采用神经网络对子系统非线性项进行逼近和补偿,并结合非奇异快速Terminal滑模思想实现了分散容错控制。最后,采用两种不同构形的三自由度可重构机械臂进行了仿真试验,结果表明,所设计的容错控制方法是有效的。
To reduce the influence of module joint actuator and sensor failure on the controllability of the reconfigurable manipulator, an online fault estimation method based on the decentralized fault-tolerant control scheme was proposed. Based on the modularized property of the manipulator and Lyapunov stability theory, a decentralized adaptive sliding mode observer is constructed to estimate the actuator and sensor faults adaptively. Meanwhile, the nonlinear terms are approximated or compensated by neural networks. Then, the idea of non-singular fast terminal mode control was employed to achieve decentralized fault-tolerant control. Finally, numerical simulation was carried out for two 3-DOF reconfigurable manipulators with different configurations. The results demonstrate the effectiveness of the proposed fault-tolerant control scheme.
可重构机械臂[ 1]因其易于对模块进行增减和互换,在航空航天、精密制造、高危作业以及军事战场等复杂环境中有着广泛的应用前景。长时间的工作会导致执行器和传感器不可避免地发生故障,若得不到及时处理,可重构机械臂会以不可预知的方式运行,给生产生活甚至生命安全带来巨大危害,因此亟需针对其进行故障诊断和容错控制的研究。目前,针对此问题,解决方法主要有基于解析模型[ 2, 3, 4]、基于信号处理[ 5, 6, 7]及基于知识挖掘[ 8, 9, 10]等。但是现有针对故障诊断和容错控制的研究一般只针对执行器或传感器单一元件故障进行,对二者同时故障的情况考虑不多。
基于此,本文提出了基于故障在线估计的分散控制方法,考虑了执行器和传感器同时故障的情况,将故障隔离在子系统中,使系统不论发生何种故障,故障关节性能的下降都不影响正常关节的控制性能,且可在不改变控制参数的条件下应用于不同构形的可重构机械臂中。
可重构机械臂子系统动力学模型可描述为[ 11]:
式中: Zi( q,
设 xi=[ xi1 xi2]T =[ qi
式中: xi、 yi分别为子系统 Sif的状态向量和输出向量,且:
式中: α( t-Tia)为单位阶跃函数, Tia为子系统 i执行器故障发生时间; ψi( qi,
本文的控制目标是针对故障子系统模型(3)设计基于故障在线估计的分散容错控制律,使可重构机械臂关节模块无论执行器发生故障,还是传感器发生故障,关节位置均能跟踪期望轨迹。
假设1 期望轨迹 yir,
假设2 子系统的执行器故障 fia和传感器故障 fis1均有未知上界:‖ fia‖≤
首先利用李代数方法进行线性变换[ 4],将关节传感器故障转化为伪执行器故障,并引入一个一阶滤波器 zi作为新的状态变量,即:
式中: yi1为关节位置传感器输出信号; ai, bi为常数,且 ai>0, bi≠0。
将式(3)中的输出方程代入式(5)中,可得:
令
设计分散自适应滑模观测器如下:
式中: υij=κij
定义观测误差为 eij=xij-
采用RBF神经网络
定义
假设3 关联项 hi( q,
式中: dij≥0为未知常数; Ej=1 +
采用RBF神经网络 νi( ei2,
式中:
定义神经网络最小估计误差如下:
式中: Ri(
定理1 当可重构机械臂子系统发生执行器或传感器故障时,由分散自适应滑模观测器式(8)与子系统的状态空间方程式(7)得到误差动力学方程式(9),结合假设2和假设3,并且采用式(19)~(23)所示的自适应更新律,能够在线估计出执行器和传感器故障,并且使状态观测误差 ei在有限时间内按指数规律收敛,即估计状态
神经网络权值
式中: ηif、 ηig、 ηip、 ηis、 λi均为正的常数,且子系统传感器故障可由式(22)自适应估计得到。
考虑式(8)中 νi2的表达结构,选择合适的正常数 σi,使得当 κi2 >
则子系统执行器故障可由式(25)得到。
证明 选取Lyapunov函数如下:
步骤1 选取Lyapunov函数:
其对时间的导数为:
当 κi1 >μi1 +
步骤2 令
其对时间的导数为:
当 κi3 >bi
步骤3 令
其对时间的导数为:
考虑假设3,并注意到
定义
由上述各步骤结论及式(26)对时间的导数可知:
由Lyapunov稳定性理论和Barbalat引理可知:状态观测误差 ei将在有限时间内按指数规律收敛到零点,即估计状态
为了使可重构机械臂系统发生故障时关节轨迹仍能精确地跟踪期望轨迹,本节设计了一种基于非奇异Terminal滑模的分散容错控制器。此方法可在系统发生故障时改善控制性能,并且避免了传统Terminal滑模控制可能导致的奇异现象。
定义位置跟踪误差为:
定义非奇异快速Terminal滑模面为:
式中: αi>0, βi>0; pi, qi, ki, li为正奇数,且满足1 <pi/qi<2, ki/li>pi/qi。
式(38)对时间的导数为:
基于非奇异快速Terminal滑模的分散容错控制律设计为:
定理2 考虑含有故障的子系统动力学模型式(7),设计了如式(8)所示的基于RBF神经网络的分散自适应滑模观测器,应用式(40)所示的基于非奇异Terminal滑模分散容错控制律、式(19)~(23)所示的自适应更新律以及式(25)所示的故障辨识函数,则可重构机械臂的轨迹跟踪误差将在有限时间收敛到零,从而实现故障容错的目的。
证明 选取Lyapunov函数如下:
式(41)对时间的导数为:
将式(40)代入式(42),可得:
可见,当 si≠0时,由于1 <
(1)当
这表明 Vi( t)≤ Vi(0),因此 si是有界的。设函数 Φi( t) =ξi( ζi
(2)当
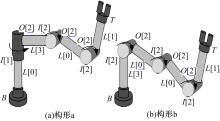
为了验证本文所设计的分散容错控制方法的有效性,采用如 图1所示的两种不同构形的三自由度可重构机械臂进行数值仿真。
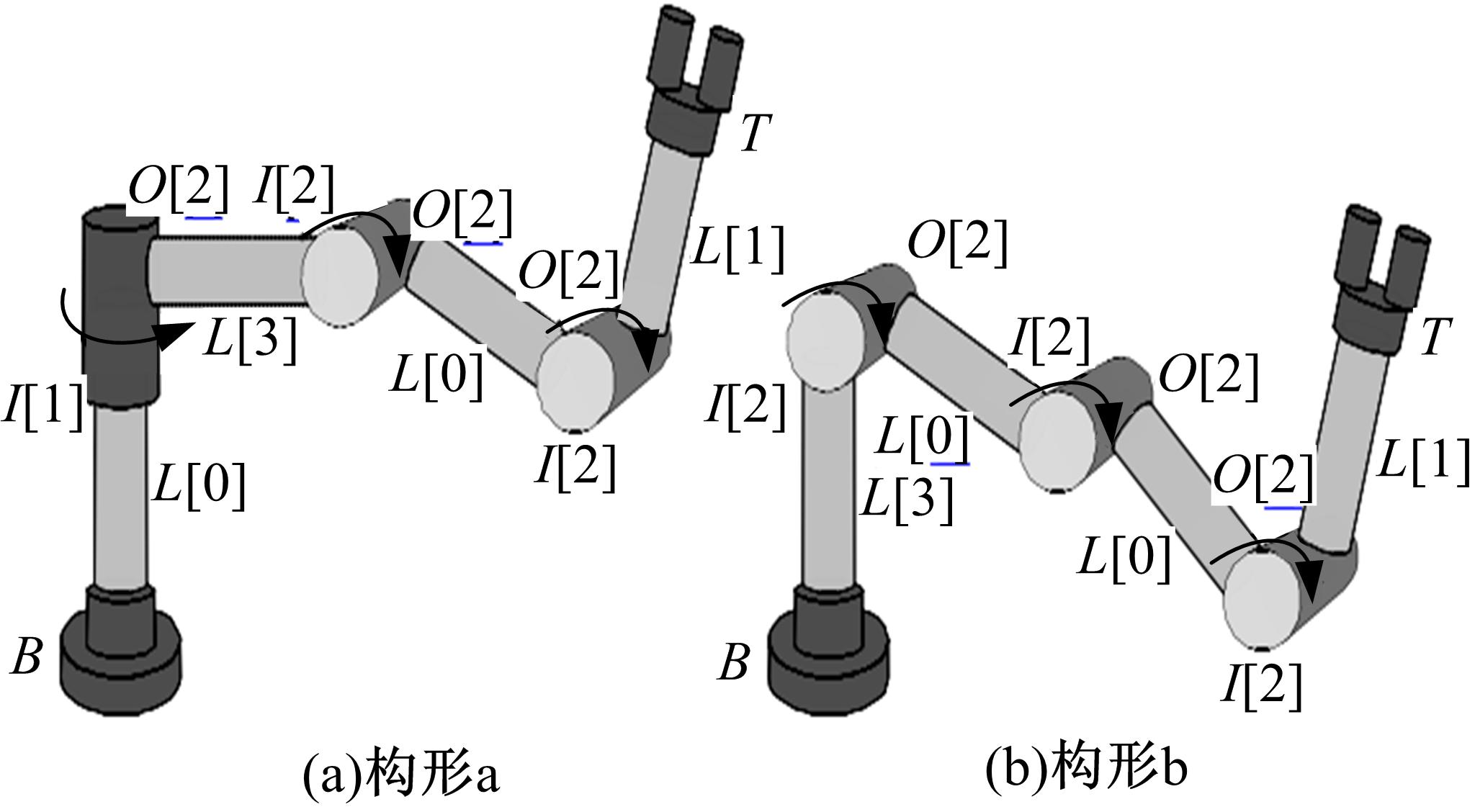 | 图1 三自由度可重构机械臂构形Fig.1 Configurations of 3-DOF reconfigurable manipulators |
仿真中设初始位置为
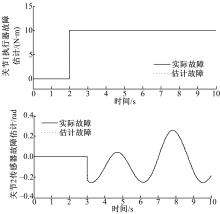
对于构形a,分别于 t=2 s和 t=3 s对关节1执行器、关节2传感器加入故障,故障函数如下:
f1 a=
图2为利用所设计分散自适应滑模观测器得到的故障估计曲线,可以看出此方法可精确地在线估计故障。
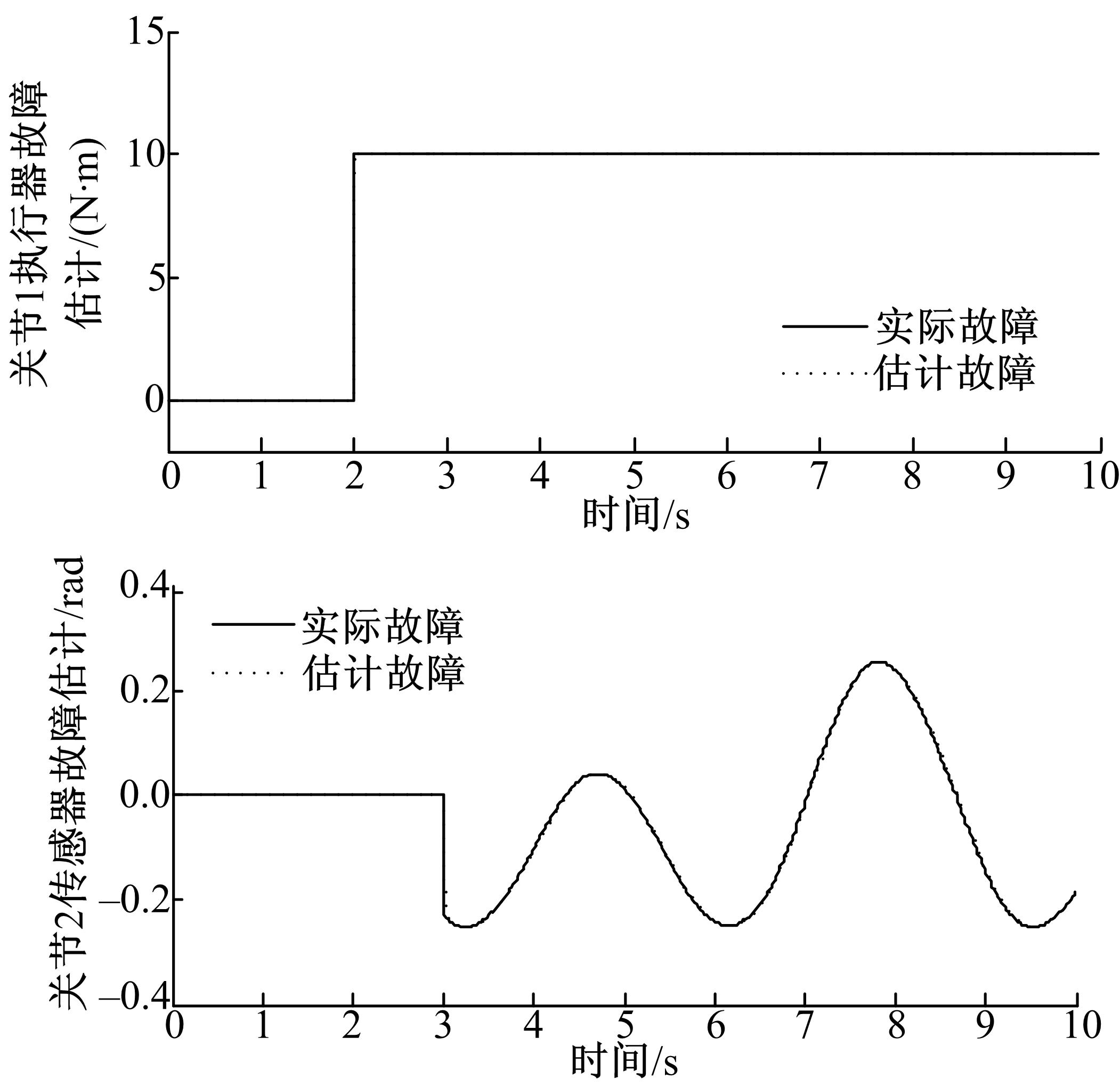 | 图2 构形a故障在线估计曲线Fig.2 Online fault estimation curves of configuration a |
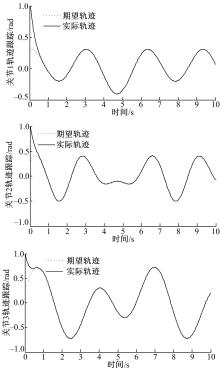
 | 图3 构形a应用所设计容错控制律关节跟踪曲线Fig.3 Joints tracking curves applied the proposed fault tolerant control of configuration a |
图3为在发生故障时,采用所设计的非奇异Terminal分散容错控制律得到的轨迹跟踪曲线,从图中可知,各子系统得到了满意的跟踪性能。
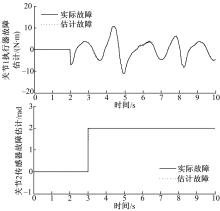
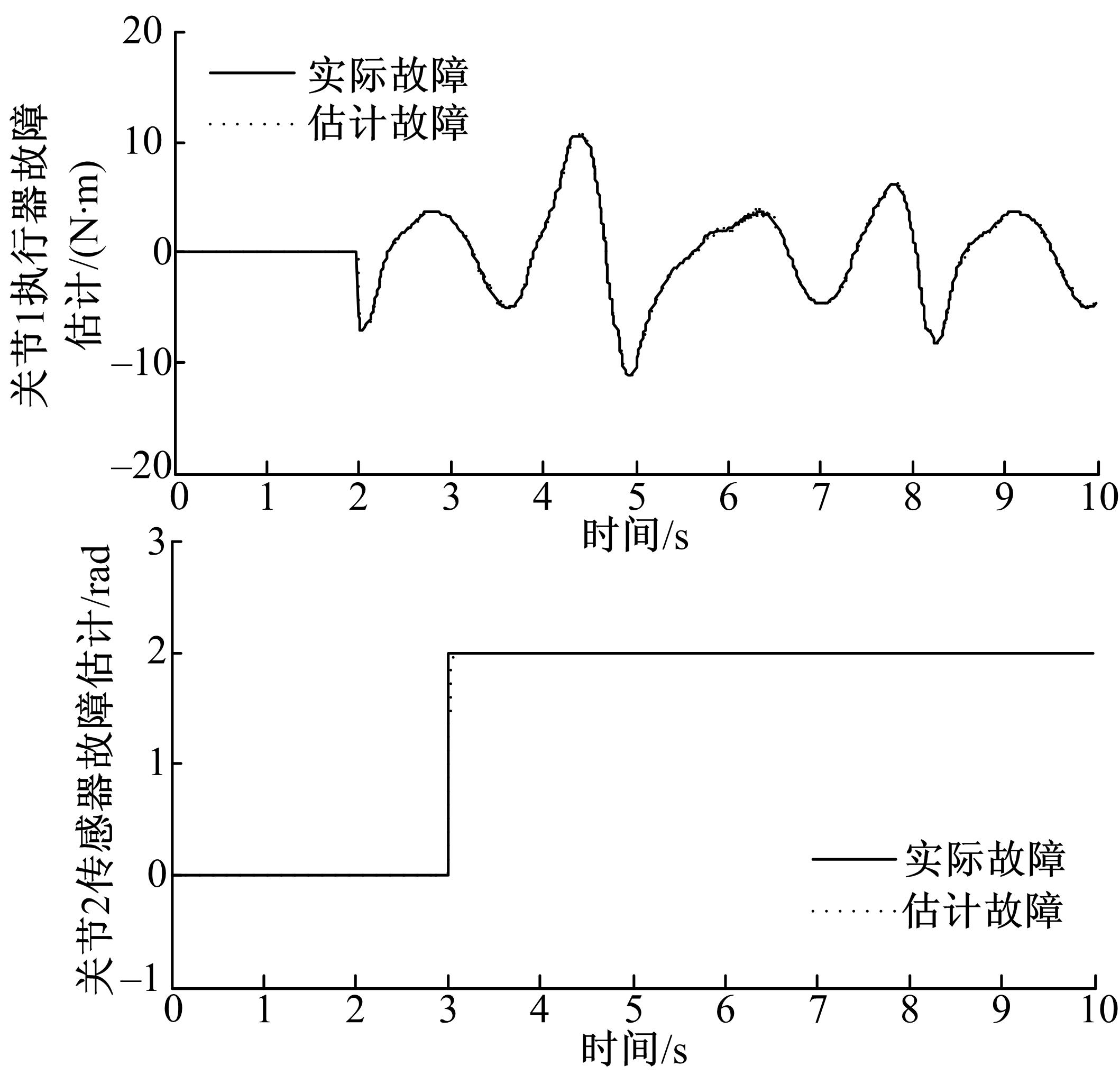 | 图4 构形b故障在线估计曲线Fig.4 Online fault estimation curves of configuration b |
图4和 图5是在不改变控制参数的条件下应用构形b进行相同的数值仿真的结果,其中故障函数如式(44)所示。
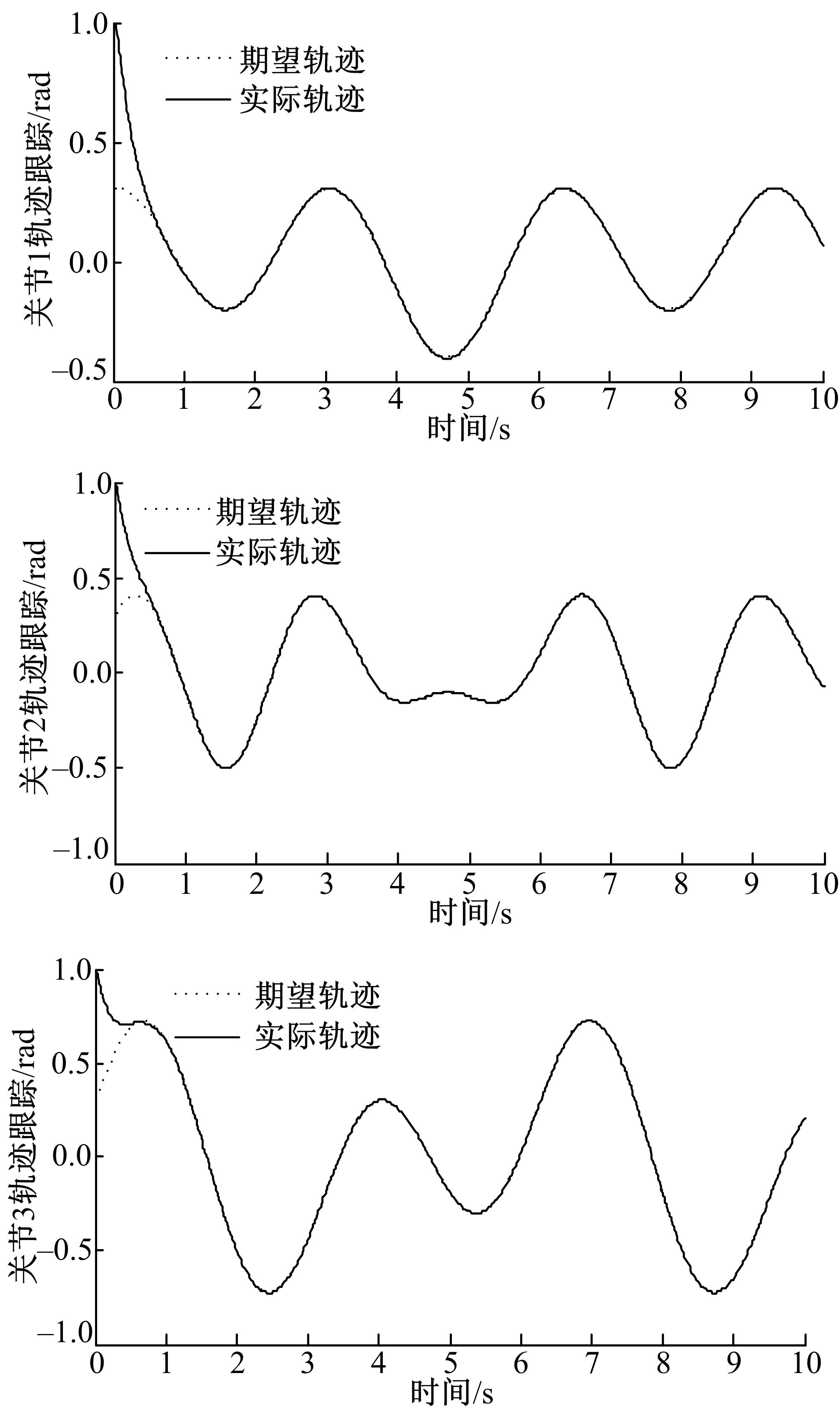 | 图5 构形b应用所设计容错控制律关节跟踪曲线Fig.5 Joints tracking curves applied the proposed fault tolerant control of configuration b |
从 图4和 图5可以看出:在不改变参数的条件下,所设计的控制方法仍然适用,因此所提方法可应用于具有不同构形、不同自由度的可重构机械臂。
针对由于可重构机械臂模块关节执行器和传感器故障而导致控制系统性能下降的问题,提出了一种基于故障在线隔离的分散容错控制方法。基于可重构机械臂的模块化属性,设计了分散自适应滑模观测器以实现执行器和传感器故障隔离,并结合非奇异Terminal滑模控制方法对子系统故障进行容错处理。此方法将故障隔离在子系统内,且可在不修改控制参数的条件下对不同构形的可重构机械臂实现容错控制。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|