












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
液压驱动六足机器人步行腿性能
[刘逸群1  , 邓宗全
, 邓宗全1 , 赵亮2 , 丁亮1 , 佟志忠1 , 高海波1 ]
, 邓宗全, 佟志忠|
|


作者简介:刘逸群(1988-),男,博士研究生.研究方向:六足机器人.E-mail:lyq.new@163.com
针对所设计的一种基于液压驱动的六足机器人步行腿,建立了腿部运动学模型并分析了其足端运动空间。构建了腿部性能测试系统,设计了性能测试台控制系统硬件,并开发了运动测试软件。试验结果表明:腿部单关节的运动跟踪误差和关节协调运动跟踪误差均小于1°,关节动态特性满足频率0.5 Hz时幅值衰减小于-3 dB,验证了步行腿性能能够满足六足机器人的运动需求。
A kinematic model of the leg is established and the workspace of the foot is analyzed based on the walking leg designed for a hydraulically actuated hexapod robot. The performance testing system of the leg is established, the hardware of the controller of the testing system is designed, and the software for motion testing is developed. Experimental results show that the movement tracking error of single joint and the coordinate motion tracking error of joints are less than one degree. Dynamic characteristics of the joint meet that amplitude attenuation is less than -3 dB when the frequency is 0.5 Hz. It is verified that the performance of the waling leg meets the motion requirements of the hexapod robot.
与其他地面移动方式相比, 足式步行可选择最优足端可达支撑点, 越障能力强, 移动方向可全方位调整, 地形适应能力强, 运动灵活性好[1], 在工业、农业、军事、航天、医疗和娱乐等领域具有广阔的应用前景。步行腿直接影响足式机器人的运动性能, 其形式虽然多样, 但从机构角度讲一般可分为开链关节式腿机构、闭链平面连杆式腿机构和并联式腿机构。闭链平面连杆式腿机构设计复杂、效率低, 运动空间有限, 实现复杂运动所需运动副数和构件数较多, 甚至发生自锁现象, 在步行机器人早期研究中有部分应用。日本东京工业大学1979年研制的PV-II四足机器人采用了平面两自由度五杆腿机构, TITAN-III和TITAN-VII[2]采用了缩放式腿机构, 俄亥俄州立大学开发的ASV六足机器人[3]也采用了缩放式腿机构。并联式腿机构运动空间小, 地形适应能力差, 步行速度慢, 控制复杂, 国内外足式步行机器人均很少采用并联机构作为主体行走机构, 虽然日本成功研制了几款融入并联机构思想的双足机器人[4, 5], 但实用性较差。开链关节式腿机构简单紧凑, 足端运动空间大、灵活性好、越障能力强、姿态恢复能力强。随着新材料、高性能元件及先进制造的发展, 开链机构的刚度及精度等问题已经可以满足使用要求。代表目前世界最先进水平的四足机器人BigDog[6]和六足机器人ATHLETE[7, 8]均采用了开链关节式腿机构, 表现出了卓越的性能。COMET-IV是千叶大学最近开发的液压驱动六足机器人[9], 采用了开链关节式腿结构, 每条腿有4个驱动关节和1个足端胡克关节。为实现道路两旁山坡加固而研制的四足机器人TITAN-XI的关节式腿具有3个液压驱动自由度[10]。意大利理工学院开发的由电机和液压共同驱动的四足机器人HyQ, 腿部髋关节有横滚和俯仰2个自由度, 分别由电机和液压缸驱动, 膝关节有1个液压驱动俯仰自由度[11]。
大尺度重载对步行腿的运动能力、动态性能和力学性能提出了较高要求, 国外已开始进行相关研究工作, 而国内研制的足式机器人大多属于轻载小尺度范畴。因此, 本文以简单可靠和工程实用化为目标, 进行了大尺度重载六足机器人液压驱动步行腿的设计与分析, 并通过性能测试验证了步行腿性能能够满足机器人的运动要求。
六足机器人整体结构如图1所示, 机器人由6条腿和机体共7个相对独立的模块组成。6条腿具有相同的结构, 序号分别为1, 2, …, 6, 对称分布在矩形机体两侧。
 | 图1 六足机器人构型Fig.1 Hexapod robot model |
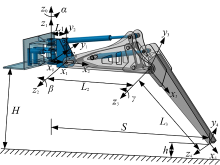
综合考虑关节运动范围、液压缸出力及其布置空间, 设计的基于液压驱动的步行腿如图2所示。腿部由基节、大腿、小腿和足构成, 主体部分采用钢板焊接而成, 关键部位进行局部加强。基节通过跟关节与机体相连, 采用双液压缸驱动, 绕竖直轴前后摆动; 大腿通过髋关节与基节相连, 绕水平轴上下转动, 驱动缸一端铰接于基节; 小腿通过膝关节与大腿相连, 绕水平轴上下转动, 驱动缸布置于大腿空腔内, 关节驱动缸两端铰点均采用关节轴承以避免承受侧向力。足端与小腿通过被动踝关节连接, 连接部位安装三维力传感器, 足底进行缓冲和防滑设计。该步行腿结构布置紧凑, 在竖直方向具有足够的强度, 水平方向具有较大的刚度, 同时具有缓冲减振及防滑功能。
 | 图2 液压驱动步行腿实物图Fig.2 Physical map of walking leg driven by hydraulic |
腿部笛卡尔坐标系如图3所示。以步行腿与机体连接处的机体坐标作为基坐标, L1、L2和L3分别为基节、大腿和小腿的长度, α 、β 和γ 分别为跟关节、髋关节和膝关节的转角, H为机体离地高度, h为足端抬起高度, S为足端与机体的横向距离。D-H参数见表1。
| 表1 步行腿的D-H参数表 Table 1 D-H parameter of walking leg |
 | 图3 步行腿坐标系Fig.3 Coordinates of walking leg |
相邻关节坐标系的转换矩阵i-1Ti的标准形式为:
式中:c表示cos; s表示sin。
将表1中的D-H坐标参数代入i-1Ti可得相邻关节的坐标变换矩阵, 则从基坐标系到足端固连坐标系的转换矩阵0T4为:
式中:T11=cosα cos(β +γ );
T12=-cosα sin(β +γ );
T13=sinα ;
T14=[L1+L2cosβ +L3cos(β +γ )]cosα ;
T21=sinα cos(β +γ );
T22=-sinα sin(β +γ );
T23=-cosα ;
T24=[L1+L2cosβ +L3cos(β +γ )]sinα
T31=sin(β +γ ); T32=cos(β +γ );
T34=L2sinβ +L3sin(β +γ )。
足端位置向量p=[px py pz]T为:
式中:c表示cos; s表示sin。
基节、大腿、小腿的长度比例L1∶ L2∶ L3=1∶ 5∶ 5, 腿部总长为L, 跟关节、髋关节和膝关节的转动范围分别为α ∈
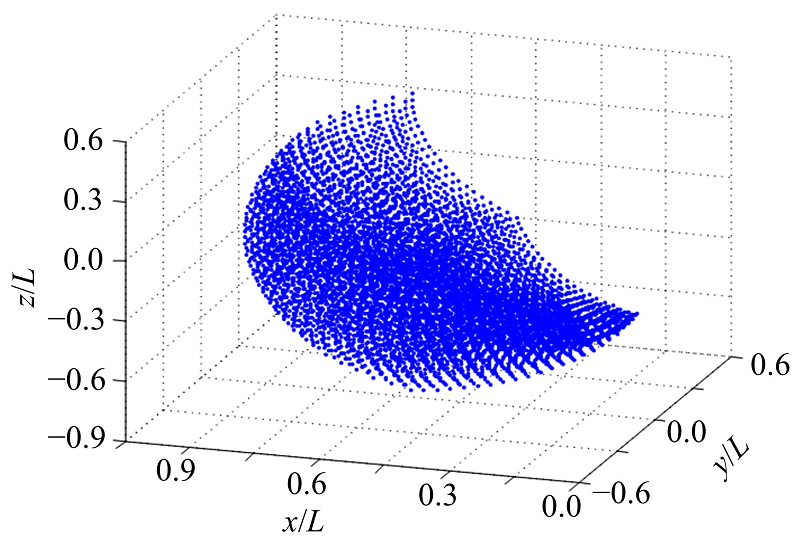 | 图4 足端工作空间云图Fig.4 Cloudy graph of a foot’ s working space |
根据足端运动轨迹规划求出各关节的运动函数, 从而驱动各关节液压缸实现预定的足端运动轨迹。根据式(3), 若已知足端位置p=[px py pz]T, 则单腿逆运动学方程为:
式中:atan2为双变量反正切函数;
从单腿关节空间向足端空间变换的Jacobian矩阵J为:
式中:J11=-[L1+L2cosβ +L3cos(β +γ )]sinα ;
J12=-[L2sinβ +L3sin(β +γ )]cosα ;
J13=-L3sin(β +γ )cosα ;
J21=[L1+L2cosβ +L3cos(β +γ )]cosα ;
J22=-[L2sinβ +L3sin(β +γ )]sinα ;
J23=-L3sin(β +γ )sinα ;
J32=L2cosβ +L3cos(β +γ );
J33=L3cos(β +γ )。
由于运动过程中, α 、β 和γ 是随时间变化的, 故Jacobian矩阵也是关于时间的函数。步行腿三关节的角速度与角加速度分别为:
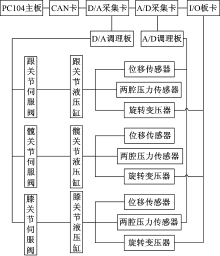
基节、大腿和小腿的驱动均采用电液伺服阀控制非对称液压缸的形式, 各关节的液压驱动系统均为独立的电液伺服系统。各关节液压伺服系统均安装压力传感器和位移传感器, 各关节转动轴安装旋转变压器, 进行实时状态监测和反馈。为确保系统能够在某一位置锁紧或在故障时应急退出, 液压回路中集成伺服使能阀和应急控制阀, 并具有断电保护特性。性能测试系统控制硬件组成如图5所示。
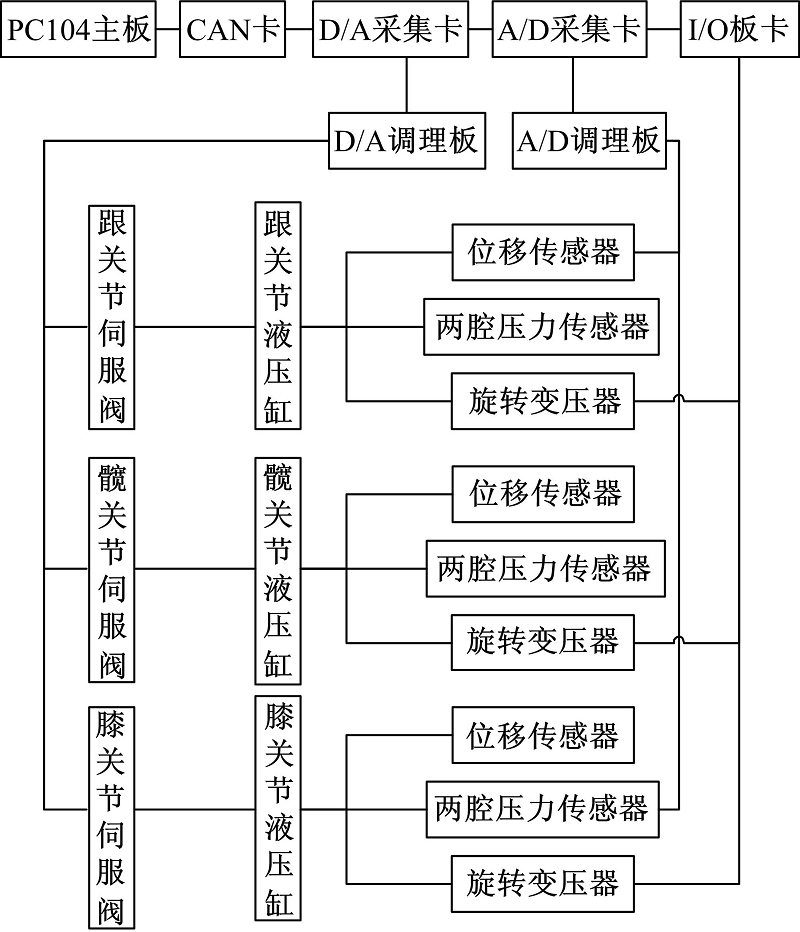 | 图5 控制系统硬件结构图Fig.5 Hardware composition of control system |
开发了融合操作管理、实时反馈、状态监测、故障保护与处理于一体的单腿运动测试软件。测试界面如图6所示, 主界面分为操作管理、数据实时反馈和系统运行状态显示三部分, 可实现足端控制和关节控制两种模式, 可实时显示数据信息与系统运行状态, 确保测试过程的安全可靠。
 | 图6 运动测试软件界面Fig.6 Software interface for motion testing |
腿部性能测试系统包括台架、机器人单腿、单腿控制器、上位机、液压泵站、液压管路与调压系统等主要单元。机器人单腿固定在台架上, 泵站压力在0~21 MPa范围内可调, 关节控制指令的发送、传感器数据的采集等实时任务由上位机统一管理与调度。试验系统实物如图7所示。
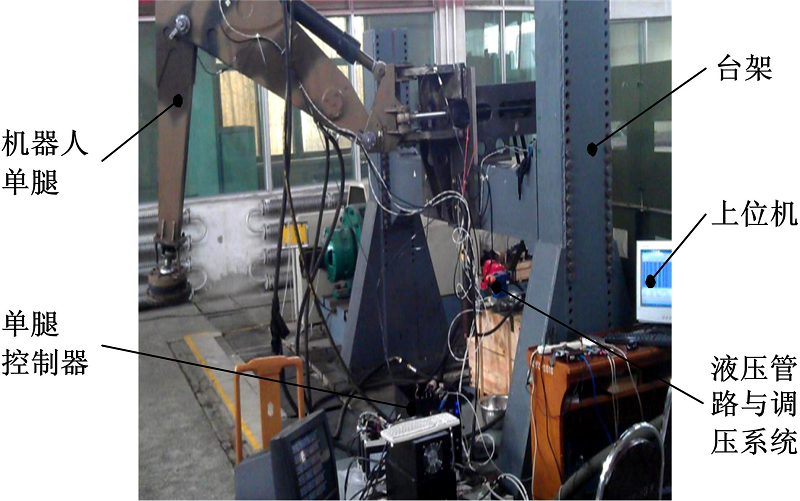 | 图7 腿部性能测试系统Fig.7 Performance testing system of walking leg |
根据任务需求进行六足机器人的总体设计, 分解细化得到的腿部性能要求为:单关节运动跟踪误差≤ 2° ; 关节协调运动跟踪误差≤ 2° ; 关节动态特性满足频率0.5 Hz时幅值衰减小于-3 dB。针对指标要求对腿部性能进行了试验验证。
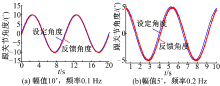
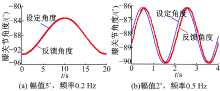
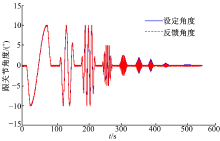
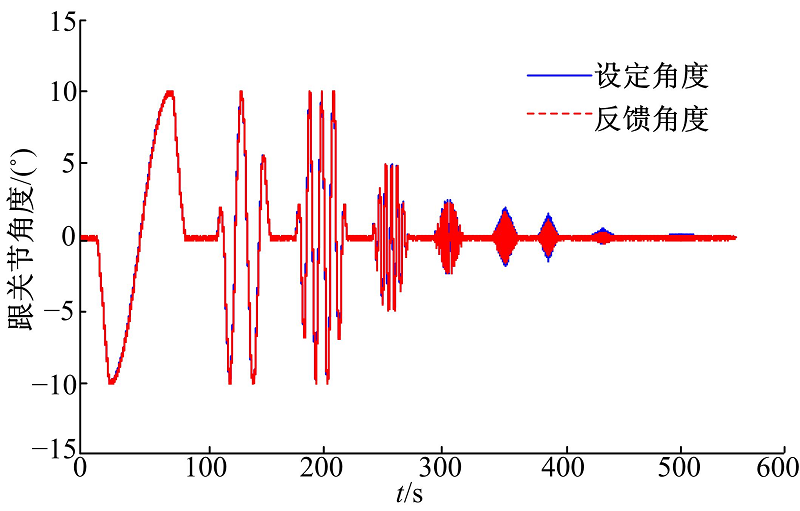
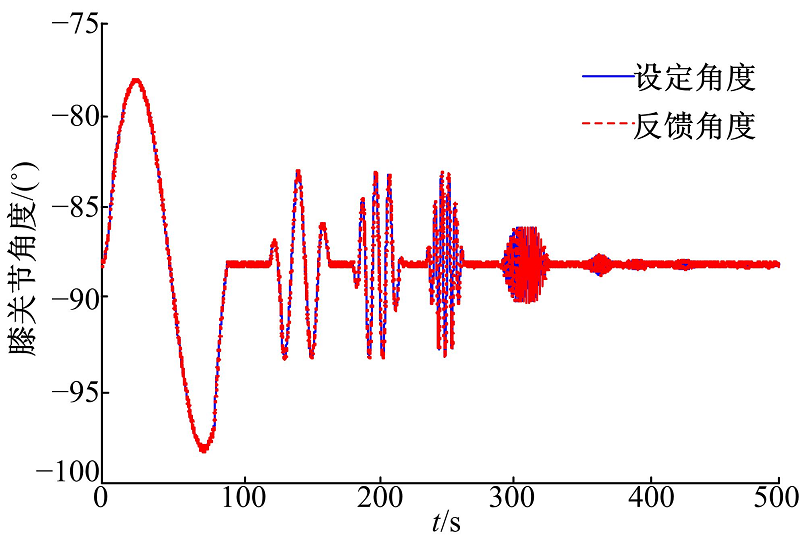
根据跟关节摆动频率0.25 Hz、髋关节和膝关节摆动频率0.5 Hz的协调运动要求, 分别给定各关节覆盖相应频率的不同幅值的正弦信号。部分试验曲线如图8、图9和图10所示, 各关节能够稳定跟随目标轨迹, 同时对跟踪误差具有一定的限幅能力, 设定信号和反馈信号的动态跟踪误差小于1° 。由于关节机械连接的摩擦以及液压系统固有特性的影响, 试验曲线较设定轨迹存在0.1~0.2 s的滞后现象。
 | 图8 跟关节正弦信号跟踪测试曲线Fig.8 Sine signal tracking test curve of the base joint |
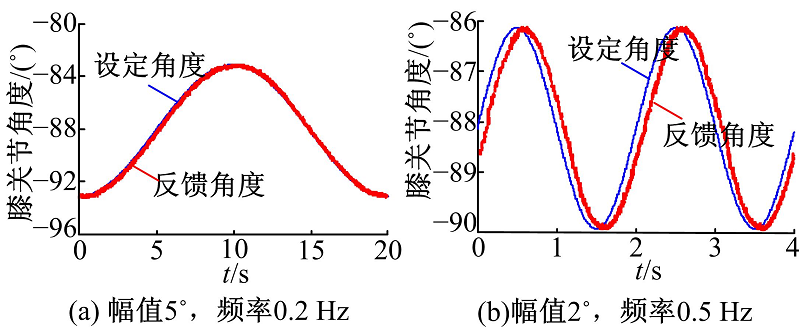
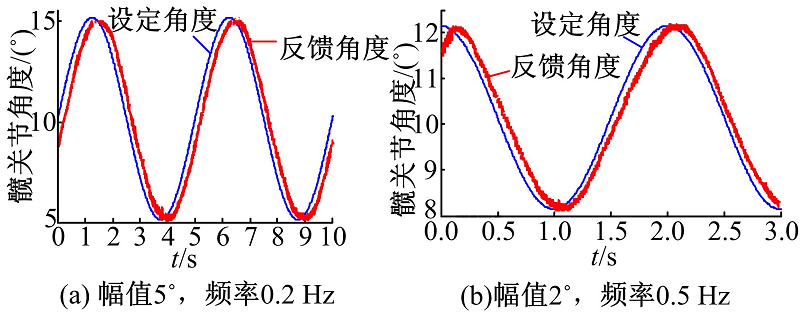 | 图9 髋关节正弦信号跟踪测试曲线Fig.9 Sine signal tracking test curve of the hip joint |
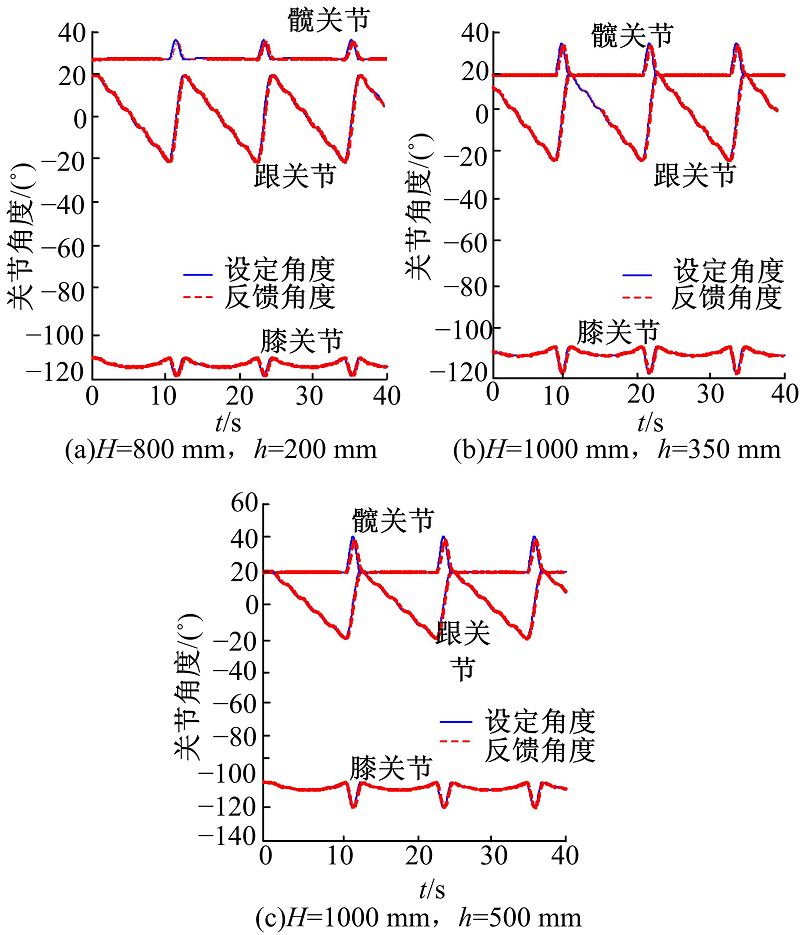
机体离地高度H和足端抬起高度h如图3所示。分别在H=800 mm、h=200 mm; H=1000 mm、h=350 mm; H=1000 mm、h=500 mm三种姿态下进行二步态、三步态和六步态运动控制信号的跟踪测试, 考核各关节协调控制的一致性。试验时系统供油压力21 MPa, 基节摆动频率0.25 Hz。六步态行走对腿部关节的协调运动能力要求最高, 六步态下三关节的运动试验曲线如图11所示, 结果表明:腿部各关节能稳定跟随目标轨迹, 设定信号与反馈信号的动态跟踪误差小于1° 。对比试验曲线与期望轨迹可知, 由于系统存在摩擦力等非线性因素, 关节角度在液压缸运动换向时存在0.2 s左右的滞后现象。
根据液压缸的最大功能曲线给定跟关节、髋关节和膝关节的位置测试信号(频率0.01~8 Hz), 分析各关节动态特性, 考核其动态性能。测试在单腿摆动相下进行, 系统压力为21 MPa, 测试位置如下:跟关节0° , 髋关节10.15° , 膝关节-88.13° 。
(1)跟关节动态特性
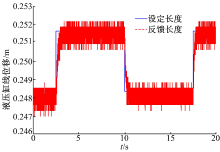
给定跟关节液压缸1° 阶跃信号, 响应的时域曲线如图12所示, 上升时间0.2 s, 由于机械连接摩擦力较大, 阶跃响应并未出现明显的超调现象。由于腿部机械部分与液压缸的连接存在一定间隙, 上升到100%信号时, 液压缸线位移在间隙内出现小幅衰减振荡, 表明控制器调定合理。
给定跟关节0.01~4 Hz的单点正弦激励信号, 幅值以不超过关节最大速度和加速度设定, 时域数据曲线如图13所示。经时域数据的频域处理, 跟关节频域特性见表2, 频率0.5 Hz时幅值衰减-1.4514 dB。制约其频宽的主要原因在于液压缸与伺服阀之间采用2 m长的软管连接, 寄生的管路动态是频宽拓展的瓶颈, 若二者采用短而粗的管路近距离连接, 动态特性会有较大改善。
(2)髋关节动态特性
给定髋关节液压缸1° 阶跃信号, 时域曲线如图14所示, 上升时间为0.3 s。给定髋关节0.01~6 Hz的单点正弦激励信号, 幅值以不超过关节最大速度和加速度设定, 时域曲线如图15所示。分析时域数据, 其频域特性数据见表2, 频率0.5 Hz时幅值衰减-1.3856 dB。由于液压缸与机械连接的摩擦力很大, 具有较强的非线性, 液压缸已出现高频振动, 限制了关节频宽。
| 表2 三关节单点正弦激励的频域特性数据 Table 2 Frequency-domain data of single-point sine excitation of the three joints |
(3)膝关节动态特性
给定膝关节0.01~8 Hz的单点正弦激励信号, 为避免给定信号能量较大时足端产生振动, 故给定信号能量较小。时域数据曲线如图16所示。分析处理后膝关节的频域特性见表2, 频率0.5 Hz时幅值衰减-0.3772 dB。由于小腿刚性较好, 频率2 Hz时幅值衰减-1.86 dB, 仍能满足指标要求。给定信号频率高于3 Hz时, 膝关节有振动输出, 但由于输入信号幅值过小而液压缸存在较大摩擦, 故信号被湮没。
试验结果表明, 各关节在频率为0.5 Hz时幅值衰减均小于-2 dB, 动态特性满足总体设计要求。关节频宽仍有进一步优化提升的空间。
针对具有特定运动性能要求的大尺度重载六足机器人, 设计了基于液压驱动的步行腿。针对腿部构型进行了运动学分析, 分析了足端工作空间并推导了实现预定足端轨迹的关节运动函数。建立了腿部性能测试系统, 研制了单腿运动控制器并开发了运动测试软件, 进行了运动跟踪试验、关节协调试验和动态特性试验。结果表明:单关节运动跟踪误差和关节协调运动跟踪误差均小于1° , 关节动态特性满足频率为0.5 Hz时幅值衰减小于-3 dB的要求, 验证结果表明步行腿性能达到了指标要求。
目前, 基于仿生设计的足式机器人步行腿研究大多关注于运动功能的实现, 较少注重性能的提升。腿机构和关节多采用无储能特性的刚性联接, 触地冲击消耗许多能量。因此, 结构轻巧、高能效、大附着步行腿将是未来的研究热点与难点。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|