



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于 H∞的车辆横向运动鲁棒控制
[钱立军 , 胡伟龙, 辛付龙, 邱利宏]
, 胡伟龙, 辛付龙, 邱利宏]
, 胡伟龙, 辛付龙, 邱利宏]
|
|


作者简介:钱立军(1962-),男,教授,博士生导师.研究方向:车辆电子,车辆控制.E-mail:hfutqlj@163.com
为了实现车辆在横向运动过程中的精确控制,提出了一种车辆横向运动鲁棒控制器。通过控制输入转向系统控制器中转角的大小得到理想的车辆质心横向加速度,实现鲁棒稳定和较小的控制误差。首先根据车辆二自由度模型、转向系统摄动、道路摄动建立广义状态方程,再对广义状态方程进行回路变换,求出控制器,最后进行稳定性分析和试验验证。所得的控制器参数随车速变化而变化,且控制器的设计比其他的变参数控制器设计要简单。稳定性分析结果表明,控制器使得系统内部稳定;实车验证结果表明,控制器能够使车辆横向运动的质心加速度误差控制在0.1 m/s2以内。
In order to achieve precise control of the lateral movement of vehicles, a robust controller for vehicle motion is proposed. Ideal lateral acceleration of the vehicle mass center is achieved by changing the input angle of the steering controller, and robust stability and smaller control error are obtained. First, according to 2-degree-freedom vehicle model, the steering system and road perturbations, the generalized state equation is established. Then a loop transformation of the state equation is made to get the controller. Finally stability analysis and experiments are carried out. The controller parameters vary with the vehicle speed, and the design of this controller is much simpler than other variable parameter controller. Stability analysis results show that the whole control system has internal stability. Vehicle experiment results show that the controller can make the acceleration error of the lateral motion of the vehicle mass center within 0.1 m/s2.
车辆横向运动控制方法分为预瞄式和非预瞄式。预瞄式以期望航向和当前航向之差作为偏差建立控制器, 必须提前知道大量道路信息, 对车辆获取外部环境信息的能力提出了过高的要求[1, 2, 3, 4]; 非预瞄式通过期望路径和车辆运动学模型计算出描述车辆运动的动力学物理量大小, 如车辆横摆角速度, 然后设计反馈控制系统进行控制。由于车辆是一个时变、非线性系统, 文献[5-8]设计了基于模糊逻辑、遗传算法和滑模控制理论的一些控制器来解决参数时变问题。这些控制器设计复杂、计算量大。其实在自主泊车、无人驾驶等工况中, 在很短的时间内车辆的速度变化不大。设计一种控制器, 在不同速度间变化时, 不一定收敛, 在具体的某个速度值时, 一定收敛, 可以减少运算量和减轻控制难度。
本文采用非预瞄式控制方法, 考虑车辆转向系统的结构摄动和路面的外部摄动[9], 以输入转向系统控制器的转角(即期望转角)为输入量, 以车辆质心横向加速度为输出量建立随车速变化的转向系统模型, 在不同速度区间内设计和当前速度区间有关的鲁棒控制器。使得车辆在横向运动中, 可以通过改变输入转向系统控制器中的转角得到想要的车辆质心横向加速度。这种控制器具有设计简单、运算量小且鲁棒稳定性好和误差较小的优点。
建立车辆二自由度运动模型如下:
式中:Izw为绕z轴的转动惯量; m为车辆质量; rw为横摆角速度; β 为质心横偏角; a、b分别为前后轮轴到车辆重心的距离; k1、k2分别为前后轮的横偏刚度; v为汽车行驶速度; δ 为前轮转角。
定义车辆重心处的横向加速度为α l, 有:
定义从前轮转角δ 到加速度y的传递函数为p1(s), 以[β , rw]为状态变量, δ 为输入变量, y为输出变量, 有系统p1(s)的状态方程如下:
考虑转向系统对前轮转角的影响。一般转向执行器模型包括电子和机械两部分, 分析起来较为困难。采用系统辨识的方法来确认转向系统模型[10, 11], 通过大量的试验和数据, 用最小二乘辨识算法可以得到期望前轮转角δ d和前轮转角δ 之间满足:
式中:a∈ [12, 20]; b∈ [1, 5]。
图1为在某一动作序列下的辨识结果, 可见得到的模型是非常切合实际的。
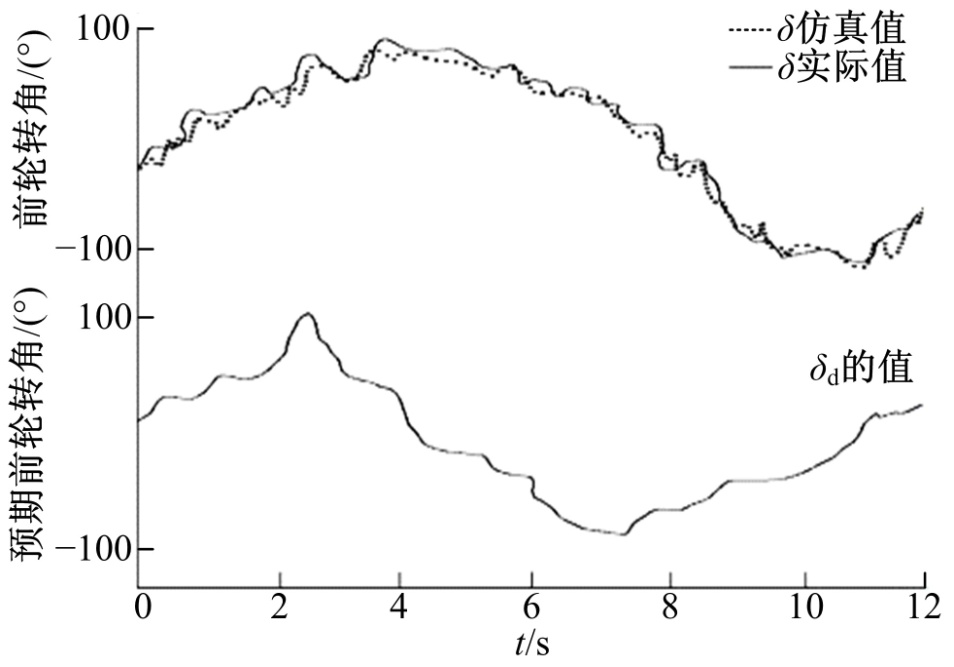 | 图1 系统辨识的结果Fig.1 Result of system identification |
令a=16+aΔ 1;
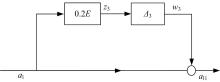
 | 图2 传递函数p2模型Fig.2 Model of transfer function p2 |
考虑路面不平度对zg车辆重心处横向加速度的影响, 通过大量计算得到经验公式如下:
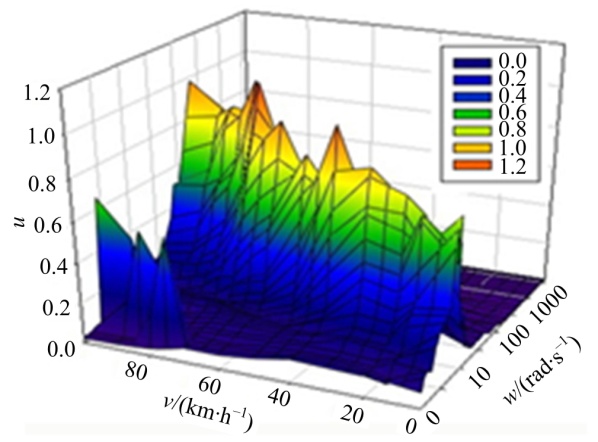
式中:α l1为考虑路面不平度后的车辆重心处横向加速度; zg为路面垂向位移; G(q)为路面系数; u为路面附着系数; uh、ug分别为横向、垂向附着系数; H为常数; kα 为轮胎横偏刚度; ζ 为与轮胎有关的系数。
假设路面为一般路面, 路面的垂直位移幅度为1~200 mm, 定义:
则α l1可以表示成如图3所示。
 | 图3 路面不平影响模型Fig.3 Model of the road uneven impact |
由图3可得到如式(9)所示的状态方程。
令y为车辆重心处实际横向加速度, δ d为输入变量, 由式(3)(5)(6)(9)(10)可得从输入转向系统控制器的前轮转角到车辆质心处实际横向加速度之间的广义传递函数为:
式中:
空间状态M是个开环广义控制系统, 需要设计一种控制器K使得系统稳定。分析系统发现, 系统中含有结构确定性摄动Δ 1、Δ 2和结构不确定性摄动Δ 3。采用鲁棒控制器中的空间状态H∞ 输出反馈控制来设计控制器K[12, 13], 结构见图4。
 | 图4 H∞ 输出反馈控制Fig.4 The H∞ output feedback control |
对于任意的Re s≥ 0有rank[sI-A B1]=rank A, 满足(A, B1)是可稳定的;
对于任意的Re s≥ 0有rank[sI-A C1]T=rank A, 满足(C1, A)是可检测的;
对于任意的Re s≥ 0有rank[sI-A B2]=rank A, 满足(A, B2)是可稳定的;
对于任意的Re s≥ 0有rank[sI-A C2]T=rank A, 满足(C2, A)是可检测的[14];
但是D11≠ 0, D22≠ 0, 不满足D11=0, D22=0的条件。
对于D11≠ 0和D22≠ 0, 不能进行控制器的设计, 需要通过回路变换化为等价标准型D11=0和D22=0。对于D22=0, 只要将D22作为反馈归入控制器K即可, 此时得到新的控制器
对于D11≠ 0, 引入新的控制系统如图5所示, 其中:
且γ > ‖
 | 图5 回路变化后的控制系统Fig.5 Control system after Loop changing |
车辆相关参数如下:车辆质量为2200 kg; 前轮横偏刚度为6× 104 N· rad-1; 绕Z轴转动惯量为3300 kg· m2; 质心到前轴距离为1.34 m; 质心到后轴距离为1.29 m; E为1.67。按照上述方法, 利用Matlab的鲁棒控制工具箱得到H∞ 输出反馈控制器K∞ 如式(16)所示。可以看出, 控制器随着车速的变化而变化。
由于摄动‖ Δ ‖ ∞ < γ -1, 定义γ =1, 则根据控制系统鲁棒稳定性定理[15, 16], 可以得到在车辆横向运动系统为内部稳定的充要条件为控制系统的最大奇异值小于1, 即:
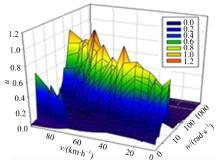
图6为控制系统在不同速度下各个频率的奇异值。由图6可以看出, 奇异值都在1下方, 即整个系统是良定和内部稳定的。
 | 图6 控制系统在不同速度下各个频率的奇异值Fig.6 Singular value of control system under different frequency and different speeds |
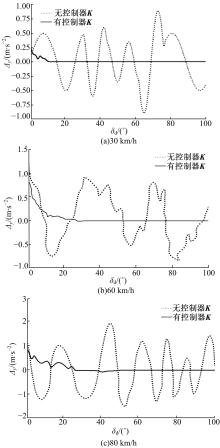
设定初始横摆角速度rw为0, 初始质心横偏角β 为0, Δ 1=sint, Δ 2=sin2t, Δ 3=cost, 分别进行仿真和试验。在车速v为30、50、80 km/h时, 得到无控制器仿真的车辆横向加速度y1和实际车辆横向加速度Y1之间的误差Δ y1随车辆前轮期望转角δ d的变化关系, 以及有控制器K时车辆的横向加速度y2和实际测得的车辆横向加速度Y2之间的误差Δ y2随车辆前轮期望转角δ d的变化关系, 如图7所示。
 | 图7 无控制器的Δ y1及有控制器的Δ y2随车辆前轮 期望转角δ d的变化关系Fig.7 Relationship of Δ y1and δ d and The relationship of Δ y2 and δ d |
从图7可以看出:有控制器时, 被控系统仿真值和试验值的误差在前轮转角变化一段时间后进入0附近的一个很小的范围, 因此为一致最终有界; 无控制器时, 被控系统仿真值和试验值的误差在外部干扰下呈不稳定状态, 误差比较大。随着车速的增大, 误差也在不断增大, 这与实际情况也是相符的。
综上所述, 控制器K∞ 使车辆在横向运动中且处于多种外部干扰下, 仍然可以通过改变输入转向系统控制器中的转角得到期望的车辆质心横向加速度, 并且实际质心加速度和期望的质心加速度间的差距很小, 稳定后在0.1 m/s2以内, K∞ 控制器使得系统实现鲁棒稳定性和较小的误差。
通过对车辆横向运动模型进行研究, 建立从前轮转角到质心横向加速度的状态方程。通过对状态方程的控制器进行回路变化, 求解出输出反馈控制器。该控制器使得车辆在泊车、低速无人驾驶等工况下的横向运动获得了鲁棒稳定性和较小的误差。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|