




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于多步时延的可重构机械臂并发故障分散容错控制
[李元春1  , 周帆
, 周帆1 , 马天豪1 , 赵博1, 2 ]
, 周帆]
|
|


作者简介:李元春(1962-),男,教授,博士生导师.研究方向:智能机械与机器人控制.E-mail:liyc@mail.ccut.edu.cn
基于Lyapunov稳定性理论和可重构机械臂的模块化属性,针对非故障系统设计了分散反演神经网络控制器,并采用自适应神经网络系统补偿子系统关联项对系统控制精度的影响。通过引入一阶滤波器将传感器故障转化成伪执行器故障,从而得到增广故障子系统模型,进而采用多步时延技术补偿并发故障,实现容错。两种不同构形的2-DOF可重构机械臂系统的仿真结果表明了所设计分散容错控制方法的有效性。
According to Lyapunov stable theory and the modularity of reconfigurable manipulator, a decentralized backstepping neural network controller is designed for the fault free system, and the adaptive neural network system is employed to compensate the reduced control accuracy from the interconnection term. An augmented subsystem is obtained by introducing a filter, which maps the sensor fault into pseudo actuator fault, and then the multi-step time-delay technique is adopted to compensate the concurrent failures and realize the fault-tolerant. Simulations illustrated by two 2-DOF reconfigurable manipulators with different configurations demonstrate the effectiveness of the proposed scheme.
可重构机械臂因其具有高度柔性结构在诸如航空航天、精密装配、核工业等人类无法直接参与的工作任务中有着广泛的应用前景。然而, 长期工作在这些人类无法直接干预的环境中, 其执行器和传感器等部件不可避免地发生故障, 若不能得到及时的处理, 将会造成不可估量的损失, 因此针对其故障诊断和容错问题的研究极为重要。
一些学者针对各类故障问题已经提出了相应的解决方法[1, 2, 3, 4]。肖冰等[5]通过滑模变结构控制器实现了故障容错和干扰抑制。Brambilla等[6]设计了次最优二阶滑模控制器并设计了观测器控制律。Henrik等[7]提出一种包含故障检测、隔离和重构的主动容错控制结构。上述方法只是针对单一故障进行容错, 而在实际复杂的控制系统中, 执行器和传感器故障完全可能同时存在。Jiang等[8]针对线性系统可能存在的执行器、传感器及元部件故障, 根据不同故障情况选择不同的控制器并修正系统控制命令。Sami等[9]结合T-S模糊模型, 利用动态输出反馈控制实现对非线性系统执行器故障和传感器故障的容错。陶洪峰等[10]利用鲁棒容错控制, 保证了整个闭环系统在执行器和传感器多故障并发时的稳定性。这种方法不需要检测和诊断环节, 可以直接对故障进行容错, 但不适用于需要实时控制的机器人系统。
本文考虑了可重构机械臂系统执行器和传感器故障并发的情形, 提出了基于多步时延技术的分散容错控制方法。利用可重构机械臂模块化特点, 在系统正常运行时, 采用分散反演神经网络控制方法对系统进行控制; 当系统发生并发故障时, 将故障作为未知动力学的一部分处理, 利用多步时延技术补偿故障对系统控制性能的影响。该方法不需要对故障进行任何估计。
存在并发故障子系统i的动力学模型为[11]:
式中:xi=
Ai=
fi(qi,
gi(qi)=
引入一阶滤波器zi将传感器故障转化为伪执行器故障[12]:
式中:zi=[zi1zi2]T; yi为子系统i的输出信号。
令Aia=Bia=diag(1, 1), 则将式(1)中输出方程代入式(2)中得:
令
本文的控制目标是:针对并发故障子系统模型(式(4))设计基于多步时延技术的分散容错控制律, 使可重构机械臂系统发生故障时, 关节位置仍可跟踪期望轨迹。
假设1 期望轨迹
定义子系统i的位置跟踪误差为:
定义速度跟踪误差为:
则其导数为:
定义虚拟控制律为:
式中:ki1> 0。
引入Lyapunov函数:
则其导数为:
下面采用RBF神经网络
式中:Wif、Wig为理想神经网络权值; Φ (· )为神经网络基函数; ε if、ε ig为神经网络估计误差。
定义
定义
式中:RBF神经网络基函数输出误差
假设2 交联项hi
式中:dij≥ 0; Ej=1+
并定义pi
同理, 采用神经网络系统
式中:
权值估计误差为
定义最小估计误差为:
设计分散反演神经网络控制律为:
其中自适应更新律为:
式中:η if、η ig、η ip均为正常数。
定理1 考虑系统正常运行时的可重构机械臂子系统动力学模型(式(2))、假设1和假设2, 设计分散反演神经网络控制律(式(25)), 自适应更新律(式(26)~(28)), 则可保证闭环系统稳定, 且轨迹跟踪误差最终一致有界。
证明 选择Lyapunov函数:
对式(29)求导得:
将式(25)代入式(30), 并考虑式(22)(27)(28), 根据假设2可知:
注意到
联立式(21)(32), 则式(31)可化为:
将式(24)(28)代入式(33)中, 则有:
因此, 在紧集(见式(35))之外,
(1)考虑系统只有执行器发生故障时, 由式(4)可得其故障模型为:
取:
则有:
选取控制率:
利用时延技术, 采用vi1
替代式(39)中的vi1
定理2 当系统发生执行器故障时, 对于可重构机械臂子系统动力学模型(式(1))和式(36), 若选取T足够小, 使得:
则由式(1)(36)(42)构成的闭环系统的稳定条件需满足
式中:β i1=(ui1-fia)/ui1, 证明过程见文献[14]。
(2)考虑系统发生执行器和位置传感器故障时, 由式(4)可得其故障模型为:
取:
则有:
选取控制率:
利用时延技术, 采用vi2
替代式(47)中的vi2
定理3 当系统发生执行器与位置传感器故障时, 对于可重构机械臂子系统动力学模型(式(1))和式(44), 若选取T足够小, 使得:
则由式(1)(44)(50)构成的闭环系统的稳定条件需满足
式中:β i2=(ui2-fis1)/ui2。
证明 考虑子系统模型
相应地有:
将式(49)(53)代入式(52), 并结合式(50)得:
根据定理2, 若满足条件(式(51)), 则有
式中:
则式(55)可写成:
由此, 定理2证毕。
(3)当系统发生执行器、位置传感器和速度传感器故障时, 由式(4)可得其故障模型为:
取:
则有:
选取控制率:
利用时延技术, 采用vi3
用式(61)替代式(60)中的vi3
定理4 当系统发生执行器、位置传感器和速度传感器故障时, 对于可重构机械臂子系统动力学模型(式(1))和式(58), 如果选取T足够小, 使得:
则由式(1)(58)(64)构成的闭环系统的稳定条件需满足
式中:β i3=(ui3-fis2)/ui3。
通过类似步骤(2)的证明, 可证明定理4成立。
由于式(62)所示的容错控制律既考虑了执行器故障, 又考虑了两种传感器故障, 因此其可应用于这3种故障同时发生的情形, 也可应用于其中几种故障并发的情形, 只需定理2~4中所给各不等式成立, 则可保证故障并发时闭环系统渐近稳定。
采用文献[14]中图1所示两种构形及相同的模型进行仿真。仿真中初始位置设置为qi
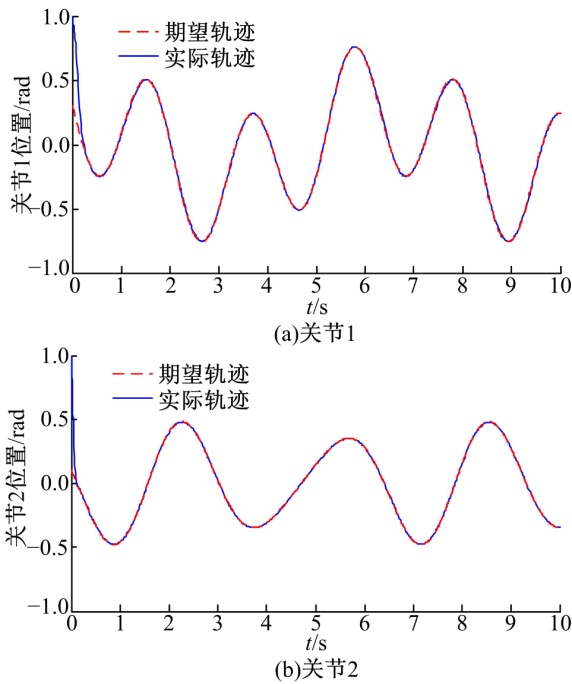
 | 图1 构形a轨迹跟踪曲线Fig.1 Trajectories tracking curves of configuration a |
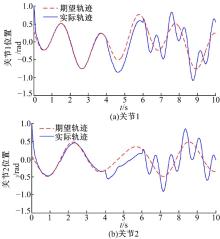
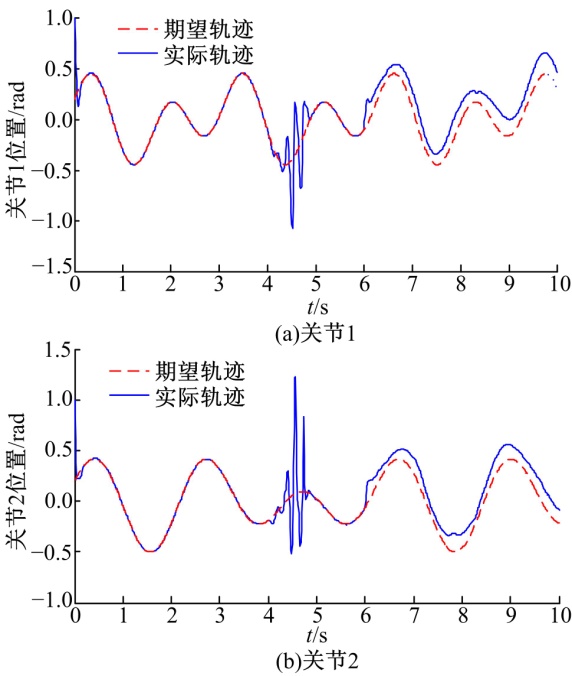
图1为构形a无故障时采用式(25)的分散控制律得到的关节跟踪轨迹曲线, 从图中可看出此控制律有效。图2为针对构形a的关节1在t=4 s时加入位置传感器故障; 关节2在t=6 s时加入执行器故障, 仍采用理想控制律(式(25))的仿真结果。从结果中可以看到, 当故障发生时, 关节轨迹已明显偏离期望轨迹。
 | 图2 构形a故障时轨迹跟踪曲线Fig.2 Trajectories tracking curves of configuration a with concurrent failures |
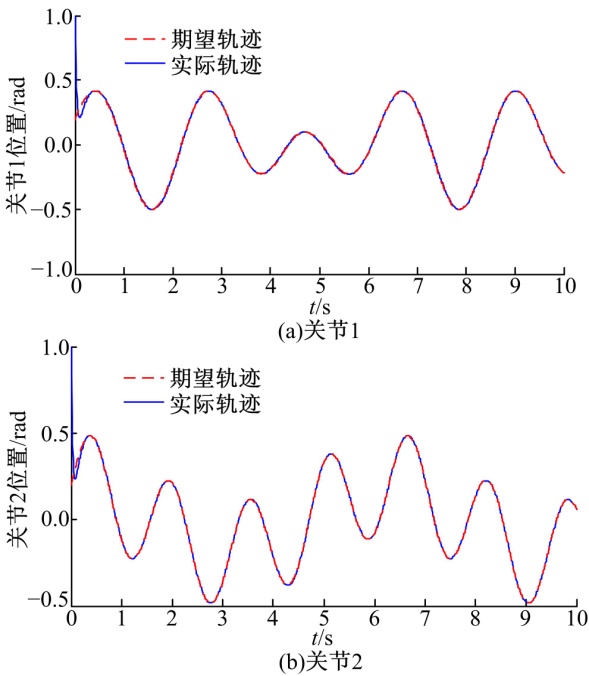
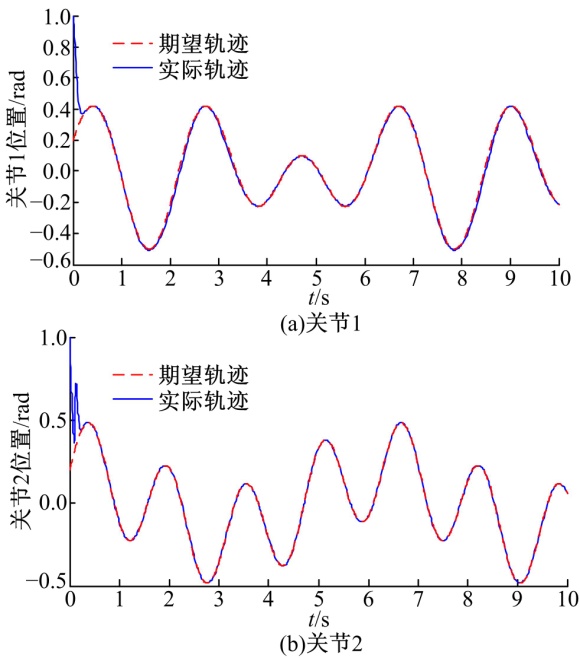
采用分散容错控制律(式(62)), 并修改控制器参数为ki1=25, ki2=40。图3为系统在故障后的容错控制轨迹跟踪曲线, 表明所设计的分散容错控制方法有效。
 | 图3 构形a故障时容错控制轨迹跟踪曲线Fig.3 Fault-tolerant control trajectories tracking curves of configuration a with concurrent failures |
 | 图4 构形b轨迹跟踪曲线Fig.4 Trajectories tracking curves of configuration b |
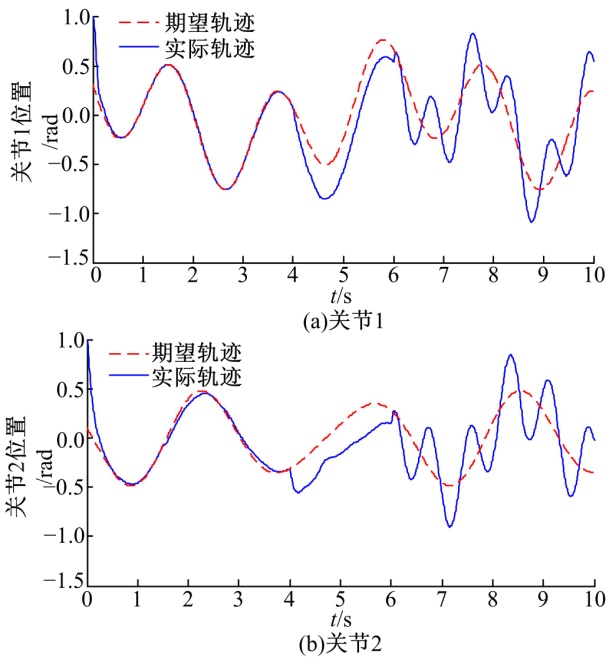
 | 图5 构形b故障时轨迹跟踪曲线Fig.5 Trajectories tracking curves of configuration b with concurrent failures |
 | 图6 构形b故障时容错控制轨迹跟踪曲线Fig.6 Fault-tolerant control trajectories tracking curves of configuration b with concurrent failures |
关节1在t=4 s加入速度传感器故障; 关节2在t=6 s时加入执行器故障。从图4~图6的仿真中可以得到与构形a仿真相同的结论。相比于文献[11]所提方法, 本文方法不需要对故障进行实时诊断和估计。另外与文献[14]相比, 本文所设计的基于多步时延技术的分散容错控制方法不仅可以解决单一执行器故障的情况, 还可以解决执行器和传感器故障并发的情况。
针对可重构机械臂系统中执行器和传感器故障并发的情形, 提出了一种基于多步时延技术的分散容错控制方法。设计了系统正常运行时采用的分散反演神经网络控制器。当系统发生并发故障时, 按照系统阶次逐级进行时延容错处理, 补偿多种故障对控制性能的影响, 不需要对故障进行在线诊断及辨识。通过对不同构形的可重构机械臂系统的仿真结果表明所设计的分散容错控制方法有效。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|