





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于向量的鲁棒分数阶比例微分控制器参数求解算法
[王春阳 , 蔡年春, 李明秋, 刘雪莲]
, 蔡年春, 李明秋, 刘雪莲]
, 蔡年春, 李明秋, 刘雪莲]
|
|


作者简介:王春阳(1964-),女,教授,博士生导师.研究方向:鲁棒分数阶控制器.E-mail:wangchunyang19@cust.edu.cn
以分数阶比例微分(FOPD)控制器为例,详细地论述了基于向量的鲁棒FOPD控制器参数求解过程,证明了该方法求解的控制器参数具有唯一性,并编写了基于MATLAB环境下FOPD控制器参数求解算法程序,实现了面向不同相位裕度、不同穿越频率以及不同被控对象的鲁棒FOPD控制器系统校正。结果表明,本文算法不仅简化了控制器参数求解过程,减少了计算量,而且求得的控制器参数唯一且有效。
Using an example of Fractional Order Proportional Differential (FOPD) controller, the parameter calculation procedure of the robust FOPD controller based on phasor method is discussed in detail. It is proved that the calculated controller parameters based on phasor method are unique. Besides, the proposed algorithm is programmed in Matlab. According to Matlab programs, the FOPD controller parameters solution algorithm and the FOPD controller are respectively designed for the systems compensation following the different given phase margin, different given gain crossover frequency and different given controlled objects. This study results show that not only the parameter calculation procedure of fractional order controllers is simplified and the amount of calculation is reduced, but also the calculated controller parameters are unique and valid.
在电机控制系统中常存在有效负荷的惯性参数不稳定或者其在某一个小的范围内变动, 导致系统开环增益变化的问题[1]。陈阳泉等[2]在稳定性裕度基础上增加增益鲁棒性条件, 提出了鲁棒分数阶控制器设计方法, 即要求系统开环增益变化时, 系统阶跃响应超调量几乎不变, 其频域特性要求伯德图相位在截止频率ω c周围是平坦的。在文献[1-11]中陈阳泉教授等证实了增益鲁棒性分数阶控制器既能满足系统稳定, 又能满足系统开环增益鲁棒性。然而, 文献[8-11]中增益鲁棒性分数阶控制器参数求解过程非常复杂、计算量大。对于不同的被控对象, 增益鲁棒性分数阶控制器参数求解方程是不同的, 难以程序化求解增益鲁棒性分数阶控制器参数。
本文提出了一种基于向量的增益鲁棒性分数阶控制器参数求解简化算法, 该方法根据映射原理预先在复平面内建立控制器向量模型, 进而利用复平面内几何关系建立方程求解控制器参数。
利用映射方法将控制器映射到复平面, 建立控制器的向量模型。
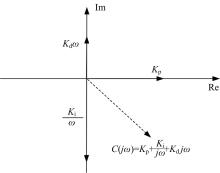
(1)整数阶控制器向量模型(见图1)为:
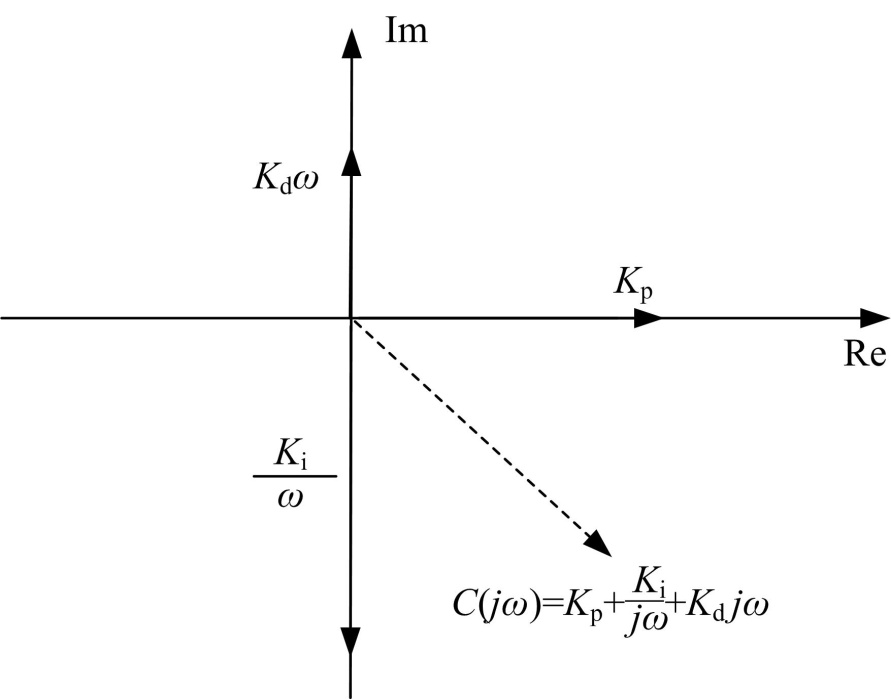 | 图1 整数阶向量模型Fig.1 IOPID controller vector model |
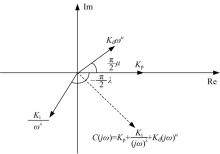
(2)分数阶控制器向量模型(见图2)为:
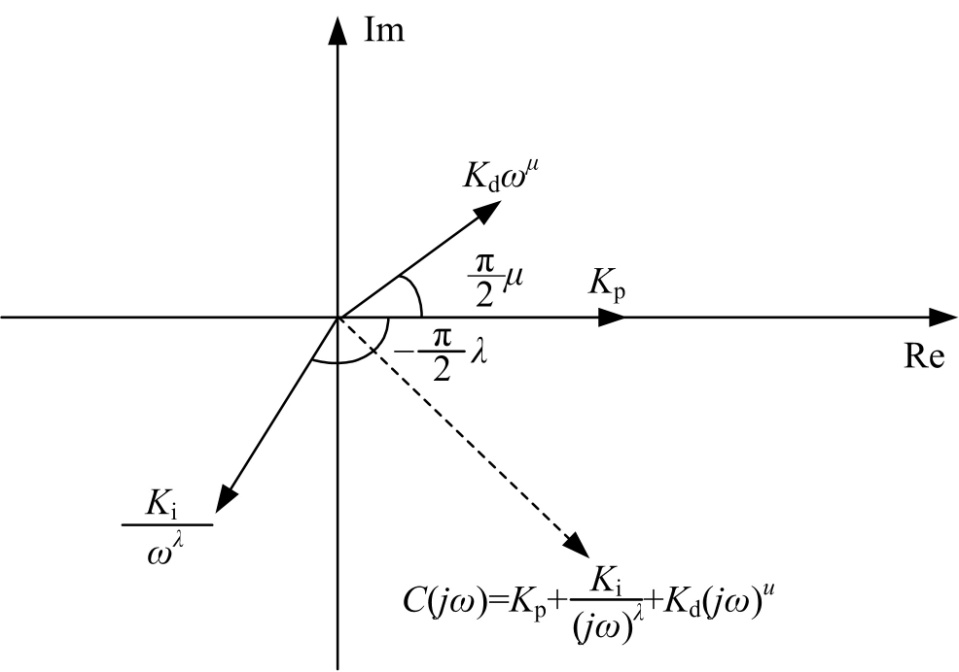 | 图2 分数阶向量模型Fig.2 FOPID controller vector model |
从图1中可以看出, 复平面内整数阶控制器向量是通过Kp、Ki、Kd调节正实轴、负虚轴和正虚轴上的向量(即比例向量、积分向量和微分向量)长度, 从而调整控制器向量的变化。整数阶控制器的比例向量、积分向量和微分向量是固定在实轴和虚轴上的, 只能构成在复平面右半平面的任一向量。整数阶控制器通过Kp、Ki、Kd分别调节比例作用、积分作用和微分作用。
从图2可以看出, 复平面内分数阶控制器向量是通过Kp、Ki、Kd分别调节比例向量、积分向量和微分向量的长度; λ 和μ 分别调整积分向量和微分向量的角度。分数阶控制器的积分向量和微分向量可以在复平面内旋转, 和比例向量一起构成的分数阶控制器向量可以构成复平面内的任一向量。
增益鲁棒性控制器参数求解是根据在复平面性能指标向量G, 求得一个校正向量L, 使其校正被控对象向量P达到要求的性能指标向量G, 即L· P=G。然后用控制器向量C去逼近校正向量L, 就可以得到控制器参数方程。基于向量的控制器参数求解步骤如下:
(1)写出被控对象的向量形式及角速度。
被控对象为P(s)写成向量形式为:
被控对象的角速度:
(2)根据系统要求, 写出性能指标向量G
稳定性性能指标:根据开环系统在ω c处的相位裕度φ m可以得到稳定性性能指标向量为:
鲁棒性性能指标:为保证系统对增益变化的鲁棒性, 增加增益变化的鲁棒性条件, 即要求系统开环传递函数的相位在穿越频率ω c附近是平坦的[1, 2, 8, 9, 10, 11, 12, 13]。
即要求性能指标向量在穿越频率ω c处的角速度为0。
(3)根据L· P=G, 求得校正向量L。
根据稳定性性能指标向量(式(7))和被控对象向量(式(5)), 由L· P=G可求得校正向量:
又根据鲁棒性性能指标(式(8)), 由L· P=G可知在频率ω c处校正向量角速度φ L和被控对象角速度φ P之和等于0, 则校正向量的角速度为:
(4)用控制器向量去逼近校正向量, 也就是说控制器向量与校正向量具有相同的模值、相角以及角速度。从而得到控制器参数求解的方程。
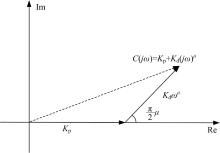
分数阶比例微分(FOPD)控制器传递函数为:
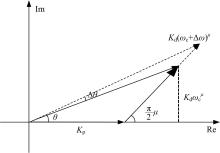
FOPD控制器向量(见图3)表示为:
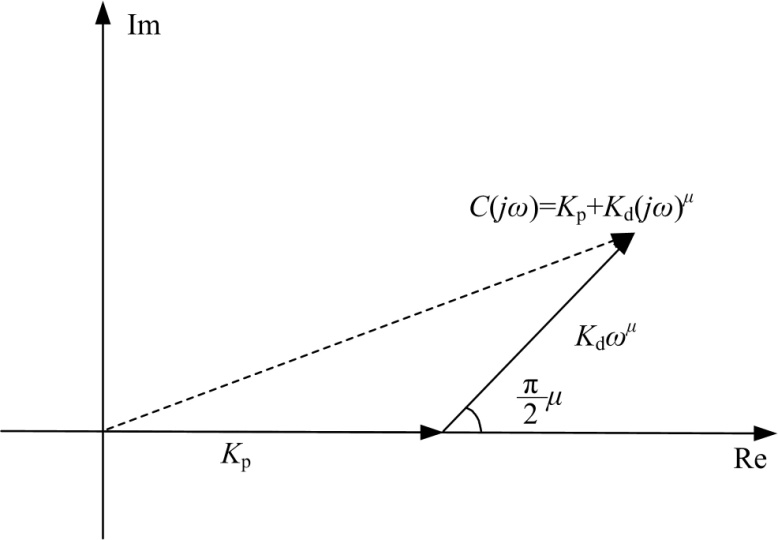 | 图3 FOPD控制器向量Fig.3 FOPD controller vector model |
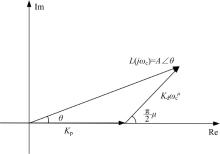
令θ =φ m-Arg
由控制参数求解步骤(4), 用FOPD控制器向量去逼近校正向量, 控制器向量与校正向量模值和相角相等, 即满足稳定性性能指标。由图4和三角形余弦定理可以得到:
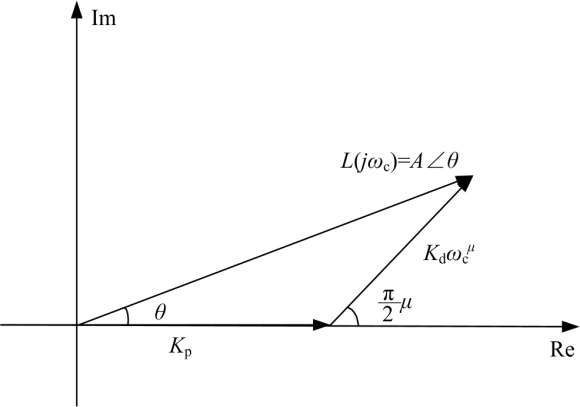 | 图4 FOPD控制器向量和校正向量Fig.4 FOPD controller vector and the calibration vector |
如图5所示, 当ω c变为ω c+Δ ω , Δ ω → 0时, 控制向量的角度变化量为Δ θ :
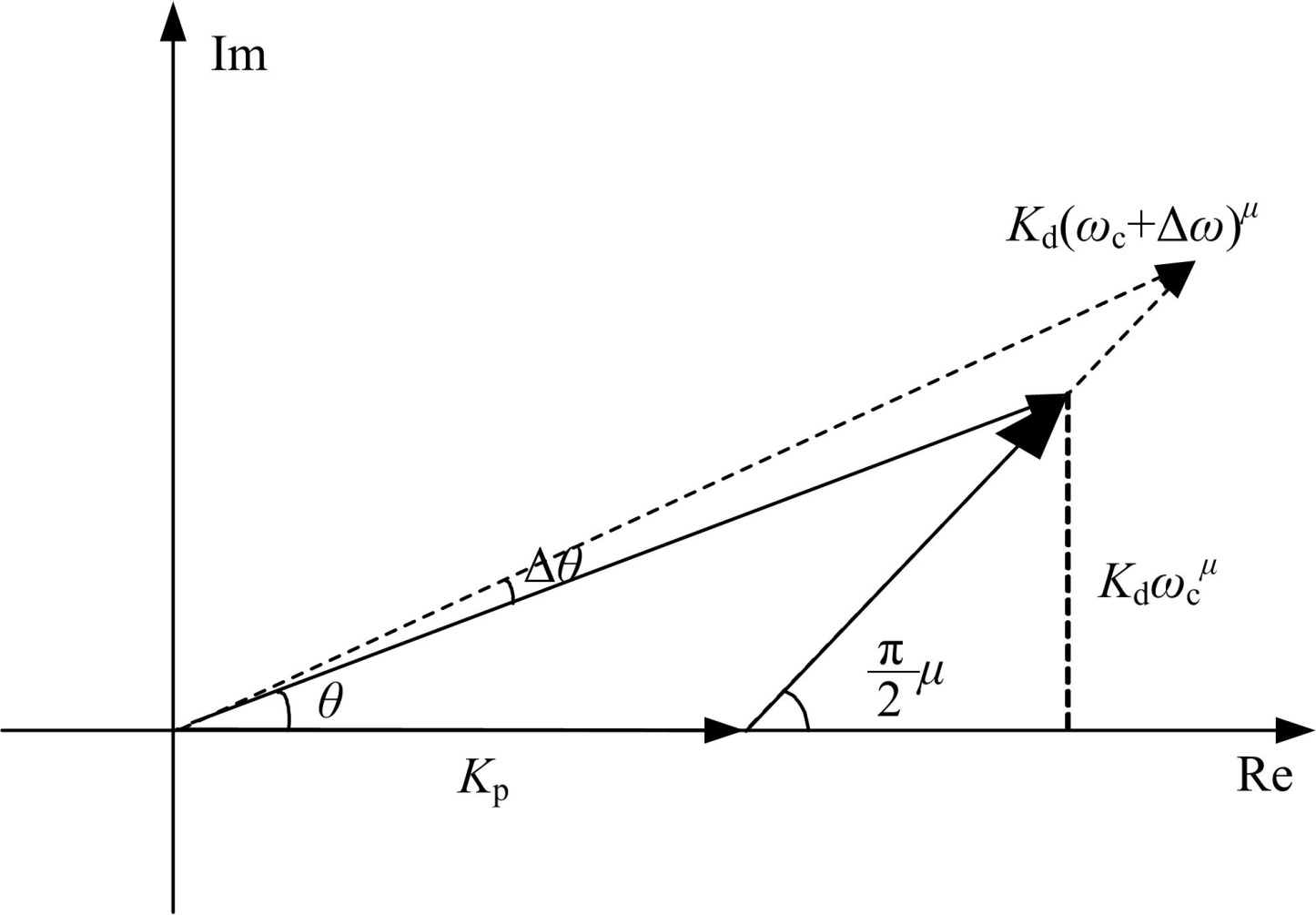 | 图5 控制器向量角度变化量Δ θ Fig.5 Angle change of the controller vector Δ θ |
由第2节步骤(4), 用FOPD控制器向量去逼近校正向量, 控制器向量角速度与校正向量角速度相等, 即满足增益鲁棒性性能指标:
可以得到:
图5中有几何关系:Kd
联立式(13)(14)(18)可以求得Kp、Kd和μ 。
由第3节可知A, θ 和φ L分别是校正向量的模值、相角和角速度, ω c为穿越频率, 且A, θ , φ L和ω c均与Kp和μ 无关。其中A, ω c> 0, Kp∈ (0, +¥ )。下面讨论方程(13)(14)和(18)求解的参数唯一性。
(1)由方程(18)可求得μ 关于Kp的函数g1
由0< μ < 2和式(19)可知,
(2)由方程(14)可得:
由式(20)可知, μ 关于Kp的连续函数。
当0< Kp< Acosθ 时, 由式(18)可得:
等式(21)左边在0< μ < 2时是关于μ 单调递减函数, 等式(19)右边在0< Kp< Acosθ 时是关于Kp单调递减函数。所以μ 在0< Kp< Acosθ 是关于Kp的单调递增函数。
当Acosθ < Kp时, 由式(20)可得:
等式(22)右边在Acosθ < Kp时依然是关于Kp的单调递减函数。所以μ 在Acosθ < Kp时是关于Kp的单调递增函数。
由式(14)所得μ 关于Kp的函数g2(Kp)为:
g2
联立方程(14)和(18)得到关于Kp的函数:
函数h
综上可知函数h(Kp)的导函数h'(Kp)在Kp∈ (0, Acosθ )∪ (Acosθ , ¥ )是恒大于0, h(Kp)为单调增函数。所以方程(14)和(18)在Kp∈ (0, Acosθ )∪ (Acosθ , ¥ )的解具有唯一性。
当Kp=Acosθ 时, 由式(20)得μ =1, 代入方程(11)得到Kd=Asinθ /ω c。三个参数均唯一。
综上所述, 由方程(14)(18)求得的Kp∈ (0, ¥ )是唯一解, 代入参数方程(18)和(13)求得的μ 、Kd均为唯一解。所以基于向量求解的FOPD控制器参数是唯一的。
基于向量的增益鲁棒性FOPD控制器参数求解的总体思路为:先根据L· P=G得到校正向量, 然后利用控制器向量逼近校正向量得到控制器参数方程。
由于控制器参数方程(13)(14)和(18)只与校正向量模值、相角和角速度有关系, 所以可以将控制器参数方程进行Matlab程序化。其中, 校正向量的模值、相角和角速度可以根据被控对象的模值、相角和角速度由L· P=G求得。
Matlab程序编写如下:
syms y m n k f A B
ω =ω c;
k=φ m;
m=Mp;
n=Fp;
f=Rp;
A=10∧ (-m/20);
θ =(k-180-n)* pi/180;
F=-f;
y=f(x);
ezplot(y)
hold on;
y=g(x);
ezplot(y)
其中, Mp为被控对象向量模值; Fp为被控对象向量相角; Rp为被控对象向量角速度; F为校正向量角速度; f(x)和g(x)分别代表方程(14)和(18)。只需要输入被控对象向量模值、相角和角速度就可以求得Kp和μ , 然后代入方程(13)求得Kd。
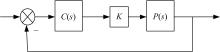
利用第5节FOPD控制器参数求解Matlab程序, 求解不同相位裕度(例1和例2)、不同穿越频率(例1和例3)以及不同被控对象(例1和例4)条件下的增益鲁棒性FOPD控制器参数。并给出了系统开环伯德图和系统开环增益K(见图6)分别取0.9、1和1.1(开环增益变化± 10%)的阶跃响应图。
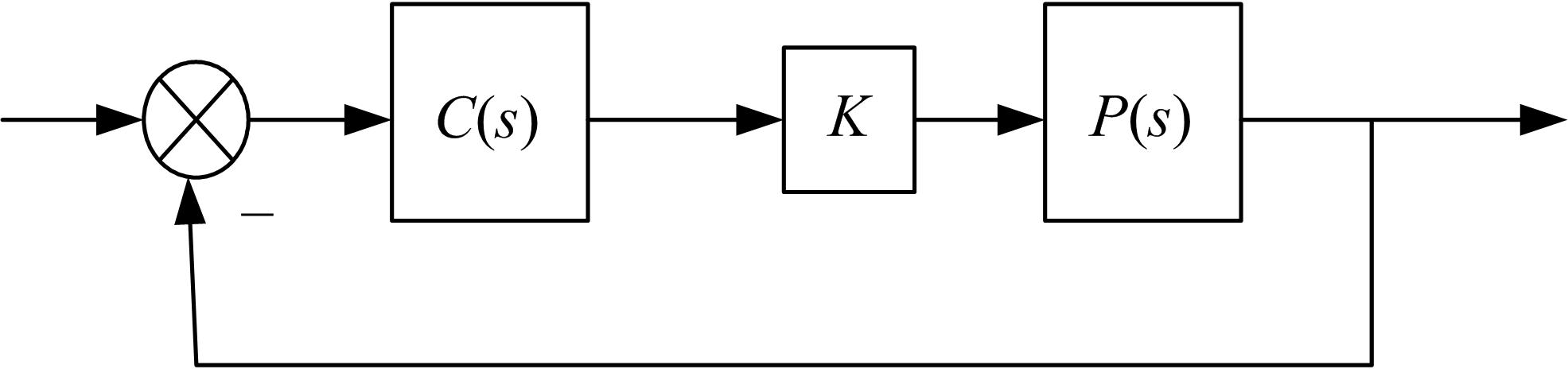 | 图6 FOPD控制系统结构框图Fig.6 Structure diagram of FOPD control system |
例1 被控对象P(s)=
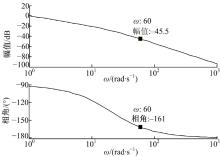
根据被控对象P(s)的伯德图(见图7), 可以得到被控对象P在ω =60 rad/s处的模值为-45.5 dB, 相角为-161° 。
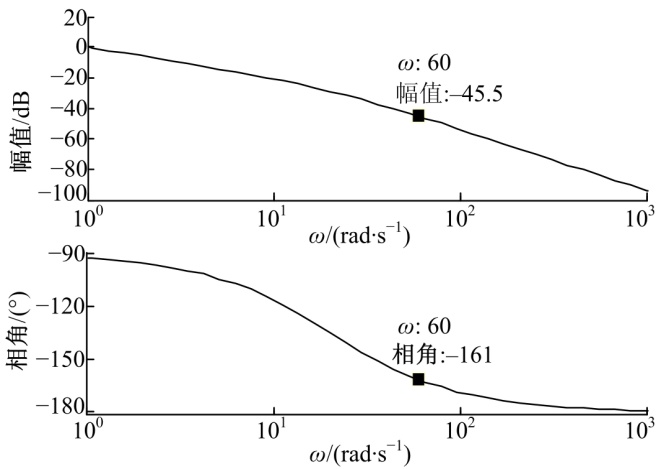 | 图7 被控对象P(s)在60 rad/s的模值和相角Fig.7 Plant’ s amplitude and phase in the 60 rad/s |
由式(6)可得到被控对象P(s)的角速度
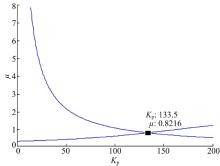
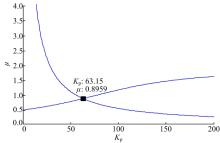
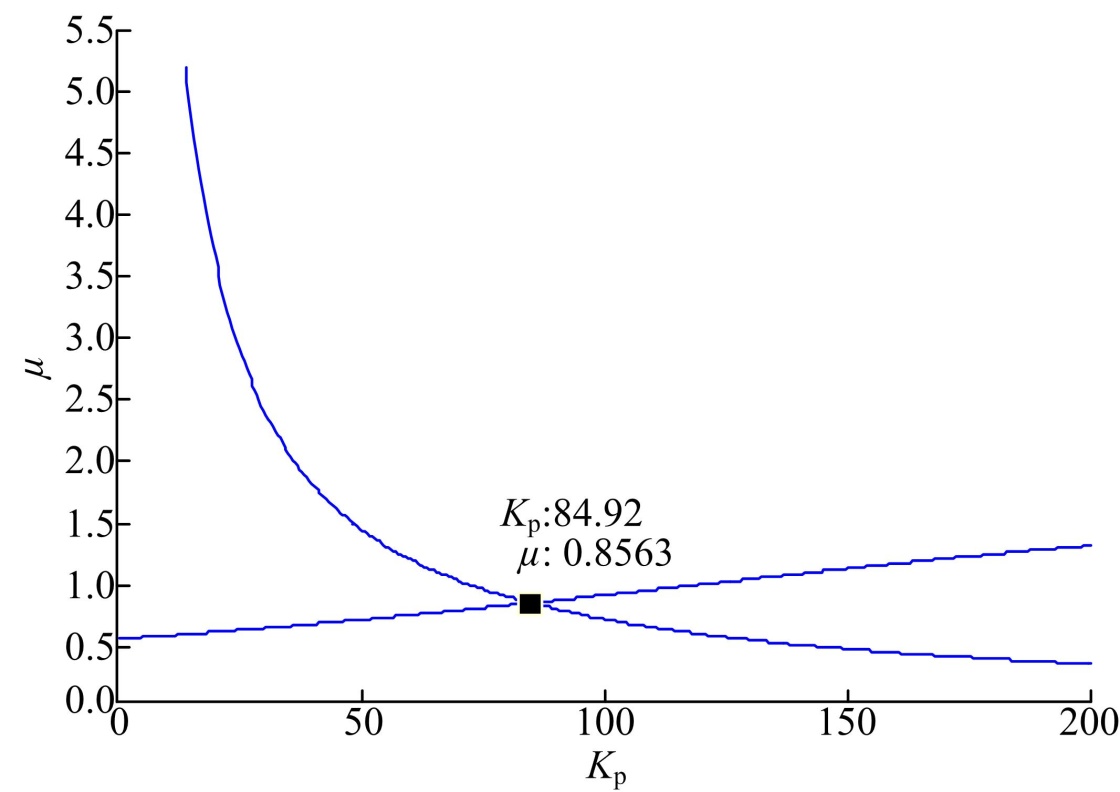 | 图8 例1所求FOPD控制器参数Kp和μ Fig.8 Kpversus μ with FOPD controller in case 1 |
可以得到系统开环传递函数伯德图以及系统开环增益变化10%的系统阶跃响应图(见图9)。
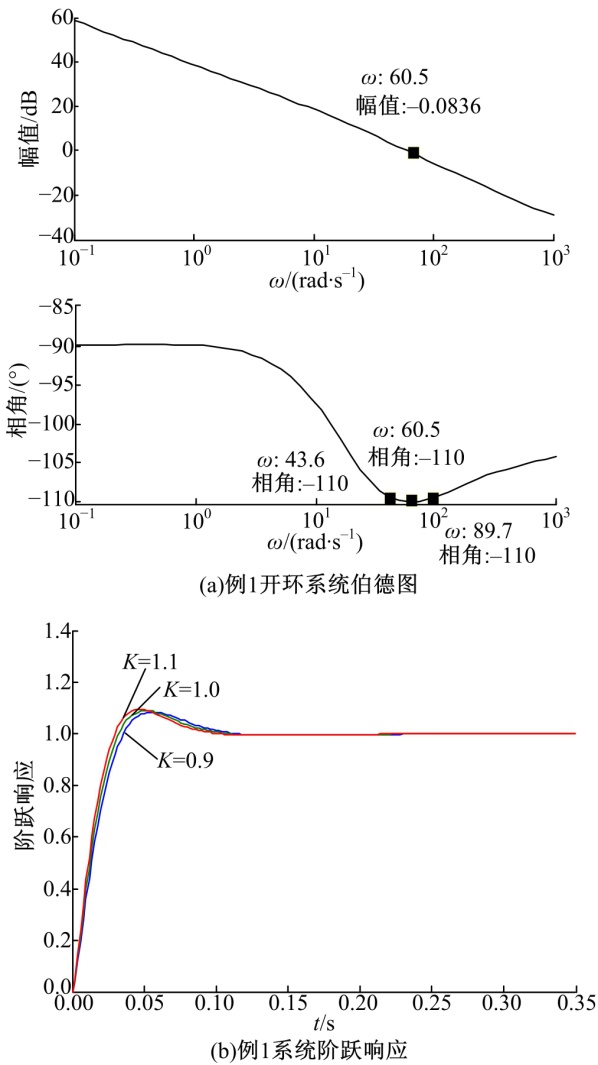 | 图9 例1所求系统开环传递函数伯德图和阶跃响应Fig.9 Bode plot and unit step responses with designed FOPD controller in case 1 |
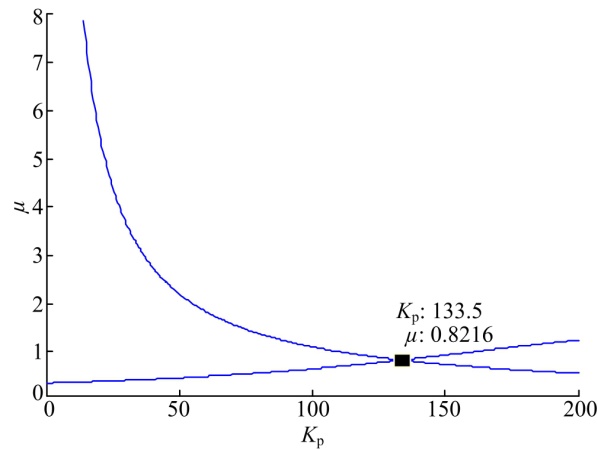
例2 被控对象P(s)=
根据Matlab求解程序, 可得FOPD控制器参数Kp=133.5, μ =0.8216(见图10), Kd=3.4157, 进而得出控制器传递函数为:
可以得到系统开环传递函数伯德图以及系统开环增益变化10%的系统阶跃响应图(见图11)。
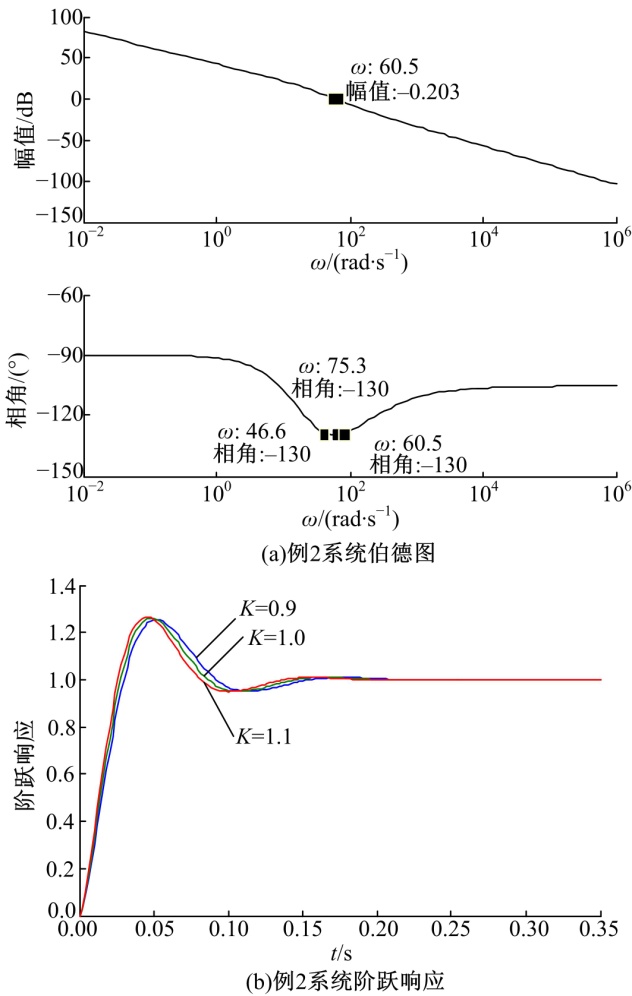 | 图11 例2所求系统开环传递函数伯德图和阶跃响应Fig.11 Bode plot and unit step responses with designed FOPD controller in case 2 |
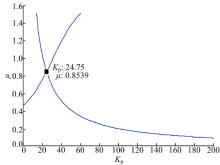
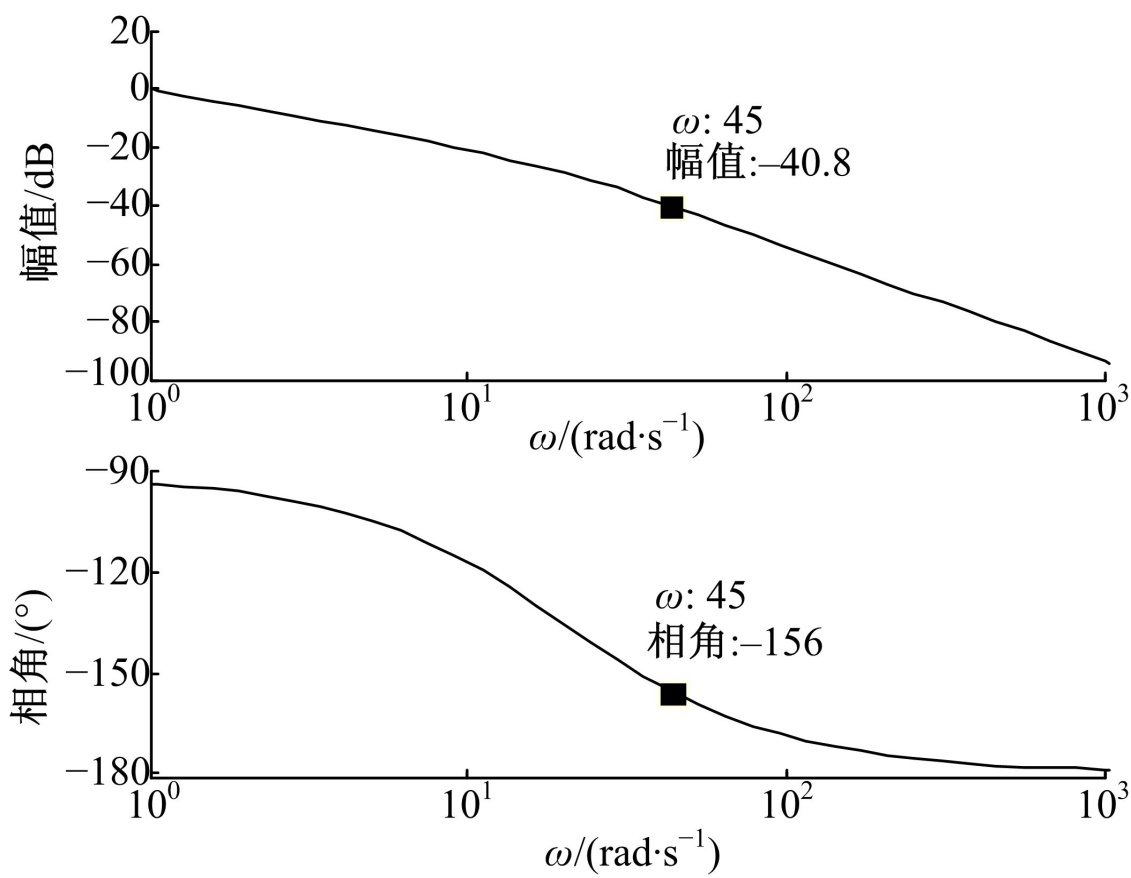
例3 被控对象P(s)=
由图12可得在穿越频率处被控对象的模值为-40.8 dB, 相角为-156° 。由式(6)可得到被控对象的角速度
可以得到系统开环传递函数伯德图以及系统开环增益变化10%的系统阶跃响应图(见图14)。
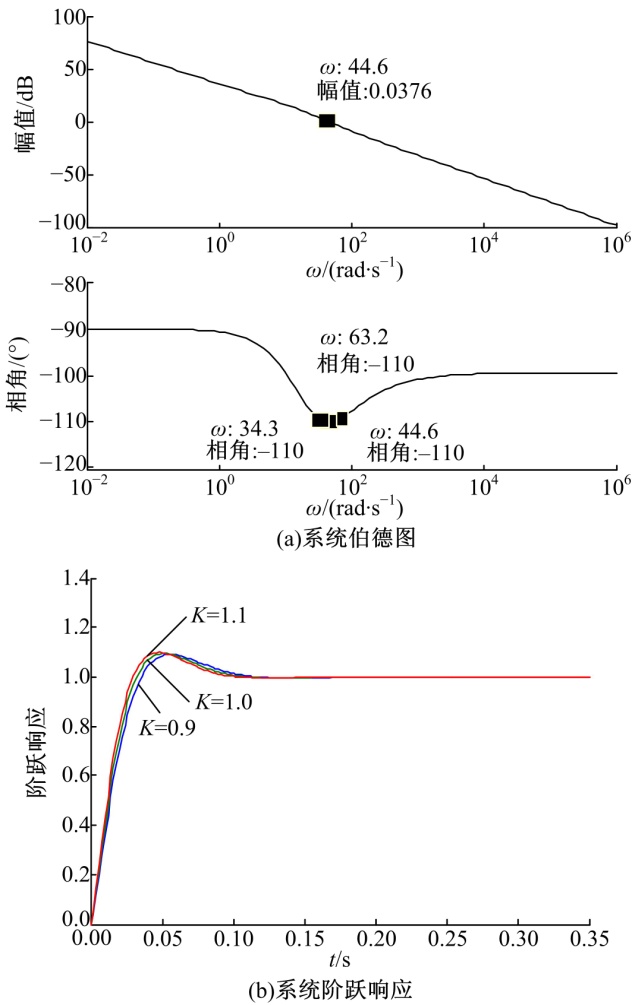 | 图14 例3所求系统开环传递函数伯德图和阶跃响应Fig.14 Bode plot and unit step responses with designed FOPD controller in Case3 |
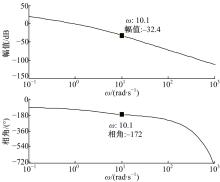
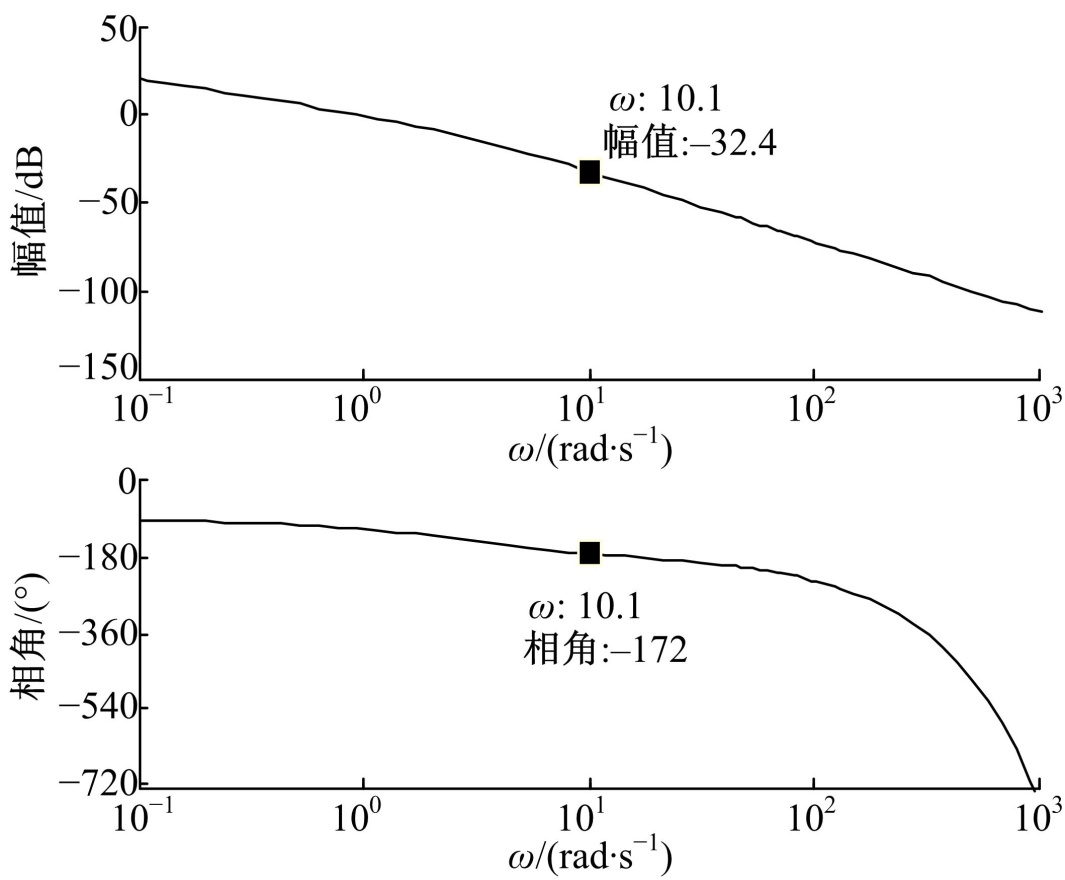
例4 被控对象T(s)=
由图15可得在穿越频率处被控对象的模值为-32.5 dB, 相角为-172° 。由式(6)可得到被控对象的角速度
可以得到系统开环传递函数伯德图以及系统开环增益变化10%的系统阶跃响应图(见图17)。
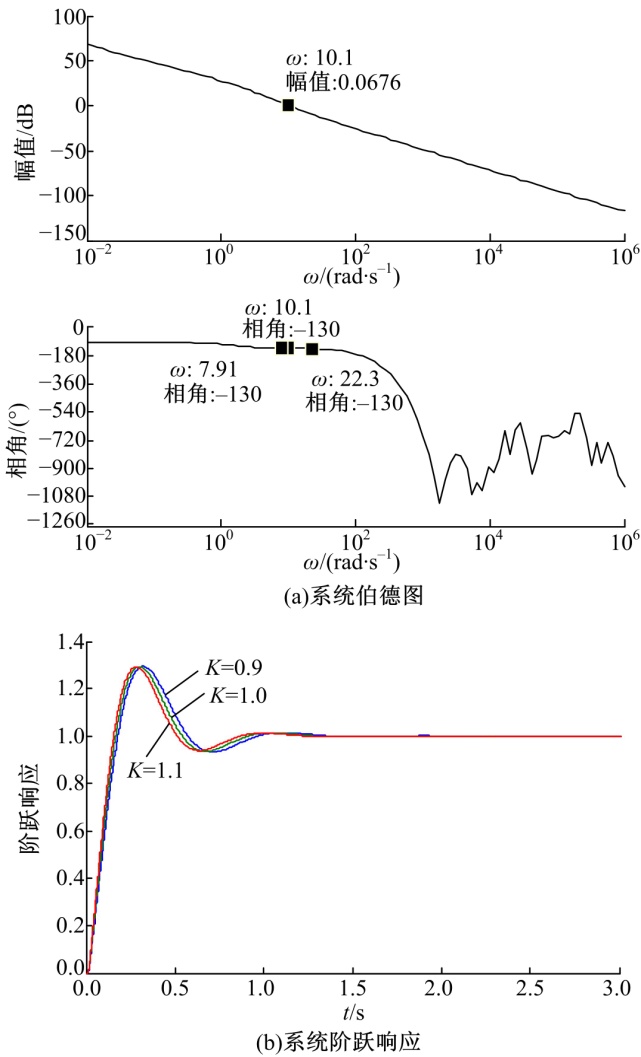 | 图17 例4所求系统开环传递函数伯德图和阶跃响应Fig.17 Bode plot and unit step responses with designed FOPD controller in case4 |
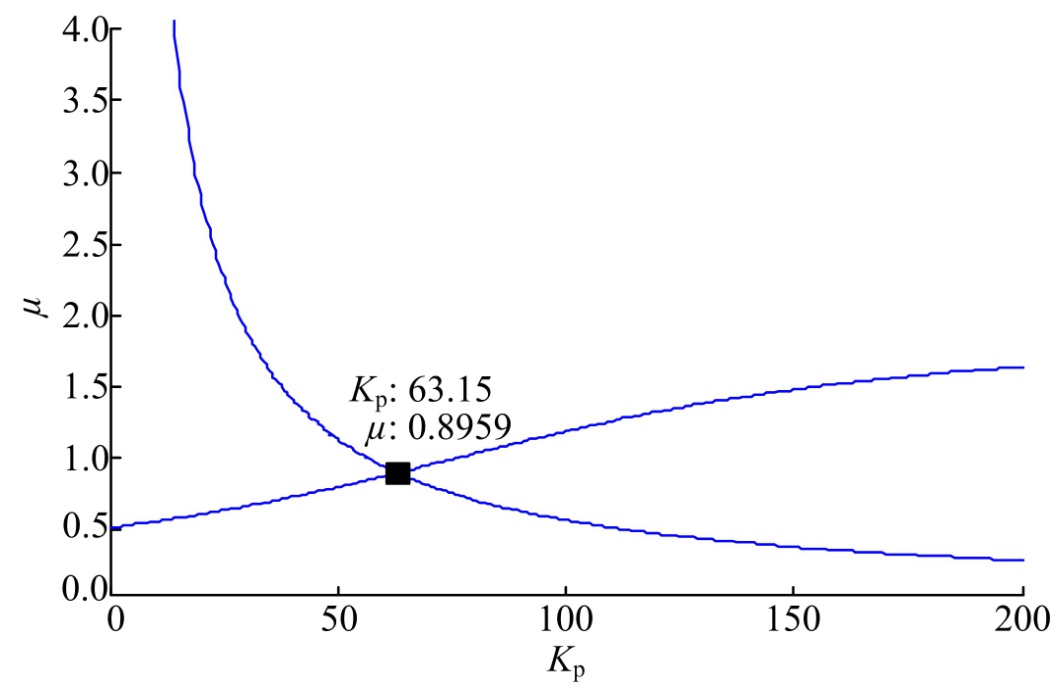
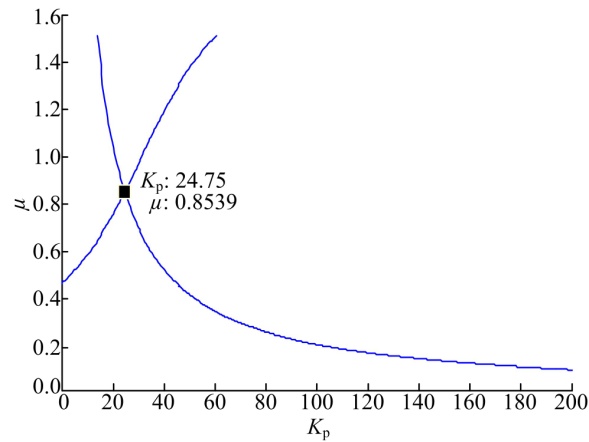
由图9(a)、11(a)、14(a)和17(a)可知基于向量方法的增益鲁棒FOPD控制器Matlab程序求解参数能满足控制系统开环伯德图在穿越频率处的相位是平坦的频率特性设计要求, 从图9(b)、11(b)、14(b)和17(b)阶跃响应可知, 基于向量的增益鲁棒FOPD控制器方法设计的FOPD控制器能够满足在开环增益变化± 10%的阶跃响应超调量几乎不变的增益鲁棒性条件。由图8、图10、图13和图16可看出基于向量的FOPD控制器Matlab程序求解参数算法的解是唯一的。
对比不同相位裕度(例1和例2)、不同穿越频率(例1和例3)和不同被控对象(例1和例4)条件下的FOPD控制器参数求解过程, 采用基于向量的鲁棒FOPD控制器参数求解算法程序有效并可快速地求解FOPD控制器参数。
提出了基于向量的增益鲁棒性FOPD控制器参数求解简化算法, 可以快速地求解FOPD控制器参数。相比于文献[8-11], 基于向量的增益鲁棒分数阶比例微分控制器参数计算方法不仅推导过程简单, 而且计算量小。同时可以程序化求解在不同被控对象条件下的增益鲁棒性分数阶控制器参数。结果表明, 基于向量的的鲁棒分数阶PD控制器参数求解算法是有效的。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|