
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
驱动冗余重型并联机构的动力学性能
[许金凯1, 2  , 王煜天
, 王煜天1 , 张世忠3 ]
, 王煜天]
|
|


作者简介:许金凯(1978-),男,副研究员,博士生导师.研究方向:精密超精密加工与检测技术及其装备研制.E-mail:xujinkai2000@163.com
针对重型并联机构构型不足的问题,提出了一种适合重载加工的2自由度龙门式驱动冗余并联机构。首先,在运动学分析的基础上,利用虚功原理建立了系统的动力学模型。其次,以动力学模型中驱动力的范数最小为目标,对驱动力进行优化,并给出了一种加速度性能评价指标。最后,基于驱动力优化方法以及加速性能评价指标分析比较了在相同运动条件下该冗余重型并联机构与其对应的非冗余并联机构的动力学性能。本文研究结果对其他重型关联机构的构型设计以及加速度评价具有重要的参考价值。
The types of heavy-duty parallel mechanisms are not sufficient for industrial applications. A two degree of freedom (2DOF) heavy-duty parallel mechanism with actuation redundancy is proposed. The kinematics of the mechanism is analyzed and the dynamic model is derived using the principle of virtual work. The driving force is optimized based on the force optimization method. An evaluation method of the acceleration is given. The acceleration of the redundantly actuated parallel mechanism is compared with its corresponding non-redundant parallel mechanism. It is proved that the proposed parallel mechanism is useful for industry and the acceleration evaluation index is also helpful for the acceleration evaluation of other parallel mechanisms.
并联机构具有刚度高、惯量小、动态特性好等优点, 在高速、大承载场合, 与串联机构相比具有明显优势。因此, 并联机构得到了广泛的关注, 出现了各种多自由度和少自由度并联机构构型, 一些并联机构成功应用于飞行模拟器、数控机床、喷涂机器人等领域[1, 2]。特别是Delta并联机器人、Z3并联机构主轴头的成功应用[3], 增强了研究人员对并联机构工业应用的信心。然而, 适用于重型加工的并联机构构型相对较少, 限制了并联机构的广泛应用和推广[4]。
动力学是并联机构的重要性能, 特别是并联机构应用于数控机床领域, 对其动态特性要求更高[5]。由于并联机构的闭环特性, 并联机构动力学具有高度耦合性、强烈非线性等特点, 动力学模型复杂。对于驱动冗余并联机构, 其动力学方程是静不定的, 对于给定的控制输入, 存在着多种可能的驱动力/力矩向量, 必须协调好各关节的驱动力输入, 否则会导致较大的内力破坏机构。这就涉及到对驱动冗余并联机构动力学的优化问题。此外, 为了衡量并联机构动力学性能的优劣, 需要适当的评价方法和指标。目前, 并联机构的动力学性能评价指标主要是沿用传统的串联机构动力学性能评价指标, 还缺少驱动冗余并联机构的动力学性能评价方法及指标[6, 7]。
本文首先提出一种适合重型加工的龙门式并联机构构型, 然后建立其运动学模型。基于运动学模型, 利用虚功原理建立系统的动力学模型, 并对该机构的驱动力进行优化。进一步, 基于动力学模型, 给出一种适合非冗余并联机构和冗余并联机构的动力学性能评价指标。最后, 通过仿真比较了冗余和非冗余并联机构的动力学性能。
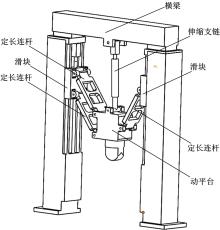
图1为具有2个平动自由度的重型并联机构, 该并联机构具有龙门架式结构, 安装在左、右两个立柱上的滑块分别由伺服电机通过滚珠丝杠驱动; 左边滑块通过两个定长连杆与动平台连接, 右边滑块通过一个定长连杆与动平台连接。两个滑块沿固定在立柱上的导轨可以上下运动, 通过定长连杆带动动平台实现2个自由度的平动, 此外一个带主动驱动的伸缩支链也连接到动平台, 从而构成驱动冗余并联机构。
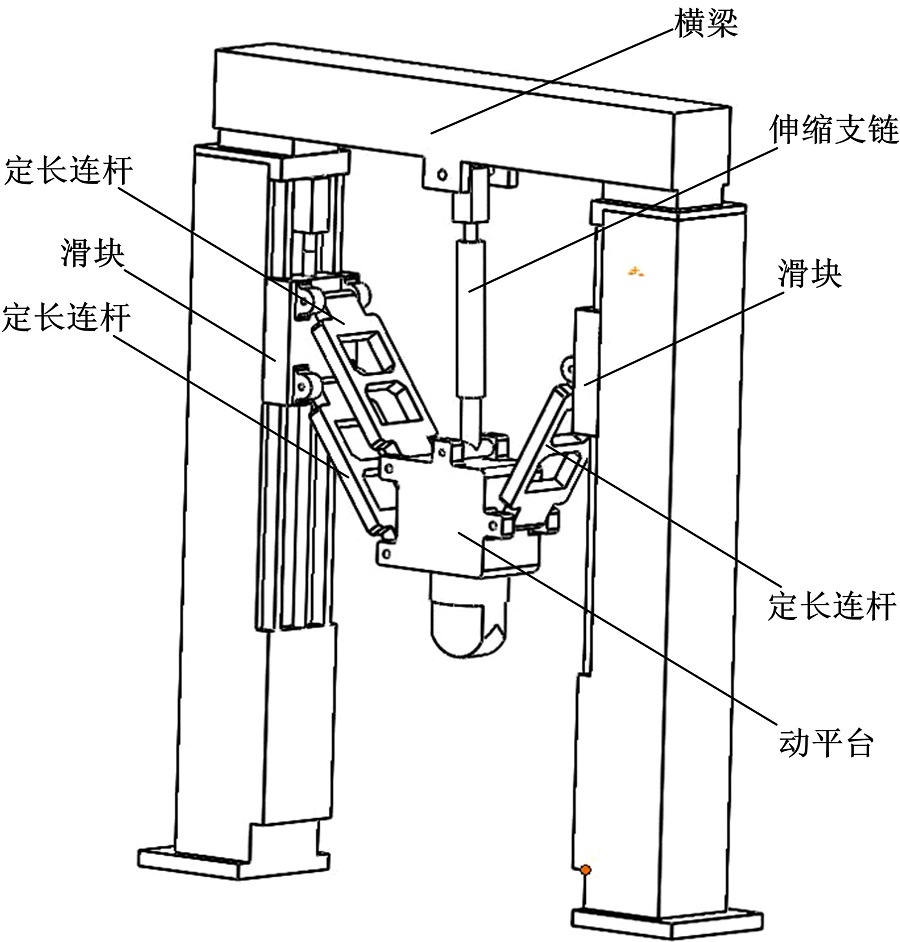 | 图1 重型冗余并联机构三维图Fig.1 3D of a heavy-duty planar parallel mechanism with actuation redundancy |
由于伸缩支链可以对动平台施加竖直方向的力, 因此添加伸缩支链可以使机构具有刚度高、负载能力强等优点。另外, 当左边两个定长连杆与右边定长连杆共线时机构处于奇异位形, 添加伸缩支链可以避免这类奇异位形。联合该冗余并联机构、两自由度铣头和沿垂直
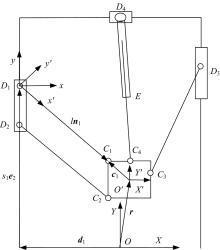
图2是重型驱动冗余并联机构的运动学模型, 在机座上两个立柱的中心点O处建立全局坐标系O-XY, 在动平台的中心处建立动坐标系O'-X'Y'。为了运动学和动力学建模方便, 在Di 处分别建立坐标系Di-xy和Di-x'y', 其中x和y轴分别与X和Y轴平行, x'轴沿着连杆Di Ci的杆长方向。
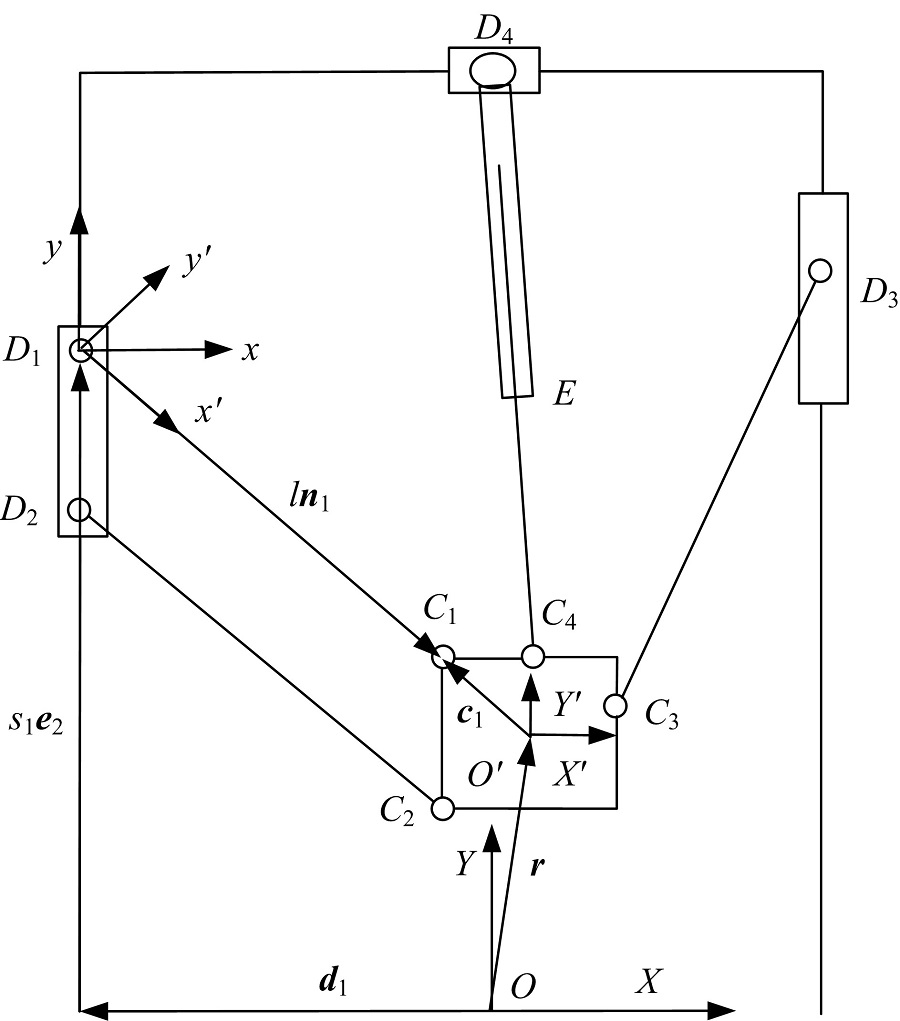 | 图2 冗余并联机床结构分析图Fig.2 Structure diagram of heavy-duty planar parallel mechanism with actuation redundancy |
定义点O'在全局坐标系O-XY中的位置矢量为r=[xy]T, 则连杆CiDi的限制方程可以表示为:
式中:ci 表示点Ci 在动坐标系O'-X'Y'中的位置矢量, ci=[cixciy]T; di表示从点O到立柱沿水平方向的位置矢量; si表示Di点在O-XY坐标系中的Y坐标值; e2=[01]T; l和ni分别表示连杆CiDi的长度和单位矢量。
伸缩连杆
式中:c4 表示点C4 在动坐标系O'-X'Y'中的位置矢量, c4=[c4xc4y]T; d4表示从点O到D4 的位置矢量; l41 和l42 分别表示伸缩连杆C4D4 的上半部分和下半部分的长度; n4表示伸缩连杆C4 D4的单位矢量。
对方程(1)两边同时取范数, 可以得到:
相应地可以得到连杆
式中:nix 和niy 分别表示ni 的x和y方向分量。
基于方程(2), 伸缩连杆
假设r'ci表示连杆CiDi 质心相对于坐标系Di-x'y'的位置矢量, 则连杆CiDi 质心相对于坐标系Di-xy的位置矢量可以表示为:
式中:rcxi 和rcyi 表示rci 在x和y方向分量; R表示从坐标系Di-x'y'到坐标系Di-xy的旋转变换矩阵。
连杆CiDi 质心在全局坐标系O-XY中的位置矢量为:
伸缩连杆C4D4 的上部分D4 E和下部分EC4的质心位置可以表示为:
对方程(1)二次求导, 可以得到:
式中:
基于方程(11), 可以得到滑块的加速度和连杆
对方程(8)二次求导, 可以得到连杆
式中:
对方程(9)和(10)二次求导, 可以得到伸缩连杆C4D4 的上部分D4 E和下部分EC4质心的加速度分别为:
式中:ω 4 和ε 4 分别表示伸缩连杆C4D4的角速度和角加速度。
本文利用虚功原理建立重型并联机构的动力学模型。利用虚功原理建模, 需要求运动构件的偏速度和偏角速度矩阵。偏速度和偏角速度矩阵反映了机构各个杆件的速度、角速度和末端执行器速度、角速度的映射关系, 可以表示为:
式中:
在求出了运动构件的偏角度矩阵和相对于关键点的偏速度矩阵之后, 需要推导各个运动构件相对于关键点的惯性力和惯性力矩。这里利用牛顿-欧拉方程求解各个运动构件惯性力和惯性力矩。规定mi (i=1, 2, 3)为支链CiDi 质量; m41 为伸缩支链C4D4上半部分B4 C的质量; m42为伸缩支链C4D4下半部分CA4 的质量; ms1 为左滑块质量; ms2 为右滑块质量; M为动平台质量; Ii(i=1, 2, 3)为支链CiDi 关于Di 点的转动惯量; I41 为伸缩支链C4D4 上半部分D4E关于D4 点的转动惯量; I42为伸缩支链C4D4下半部分EC4关于C4点的转动惯量; , g=[0-9.81]T为重力加速度。作用在支链CiDi上的力及对Di点的力矩为:
作用在伸缩支链C4D4上的合力和对D4点的力矩可以表示为:
作用在滑块上的合力和对
作用在动平台上的合力和对其质心的力矩为:
联合式(17)~(22), 由虚功原理得到:
式中:J表示雅可比矩阵; H=[τ 1τ 2τ 3]T, 其中τ 1 、τ 2 、τ 3 分别表示左滑块、右滑块和伸缩支链C4 D4的驱动力; Π 0=
从方程(23)可以列出2个与
归一化处理后, 可以得到:
式中:M(r)为惯性矩阵;
动力学性能是评价并联机构加减速特性的重要指标, 在动力学方程中影响驱动力和加减速特性的因素有惯量因素、速度项因素、重力项因素, 其中与加速度项有关的惯量因素项起主导作用。为了更直接地比较机构的加减速特性, 省略式中的速度项、重力项和外力项, 对式(25)化简可得到:
式中: N为惯性矩阵M(r)的M-P广义逆。
目前, 还缺少并联机构加速度性能评价指标。文献[8]利用最大奇异值和最小奇异值的调和平均数HMIM作为动力学评价指标。其优势在于, 对于调和平均数只有在最大奇异值σ max和最小奇异值σ min都满足比较大时HMIM的值才会较大, 保证机构具有良好的各项同性的同时实现较好的加速性能。因此这里利用HMIM指标评价机构加速性能, 该指标为:
式中:σ max 和σ min 分别为矩阵N的最大和最小奇异值。
这里假设该并联机构沿半径为1.5 m的圆形轨迹运动。并联机构应用在数控机床和机器人等领域, 工作过程中通常处于匀速运动、加速运动和减速运动3种工作状态。因此, 运动过程也包括加速、匀速和减速3个阶段。另外, 为了比较冗余并联机构和非冗余并联机构的动力学性能, 仿真过程中, 去掉伸缩支链
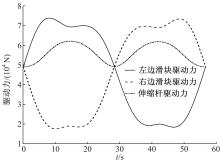
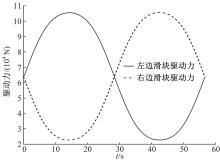
图3和图4给出了重型冗余并联机构和其对应的非冗余并联机构在仿真过程中的驱动力变化。可以看出在相同运动条件下非冗余并联机构最大驱动力明显高于冗余机构的最大驱动力, 非冗余并联机构的最小驱动力和冗余并联机构的最小驱动力差别不大。因此, 通过增加伸缩支链
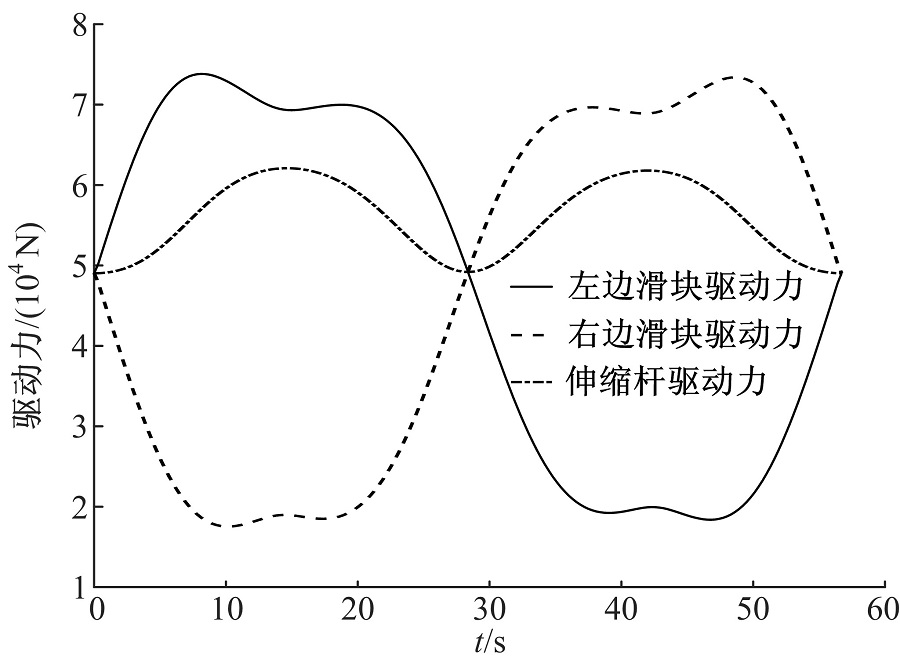 | 图3 冗余并联机构驱动力Fig.3 Driving force of redundant parallel mechanism |
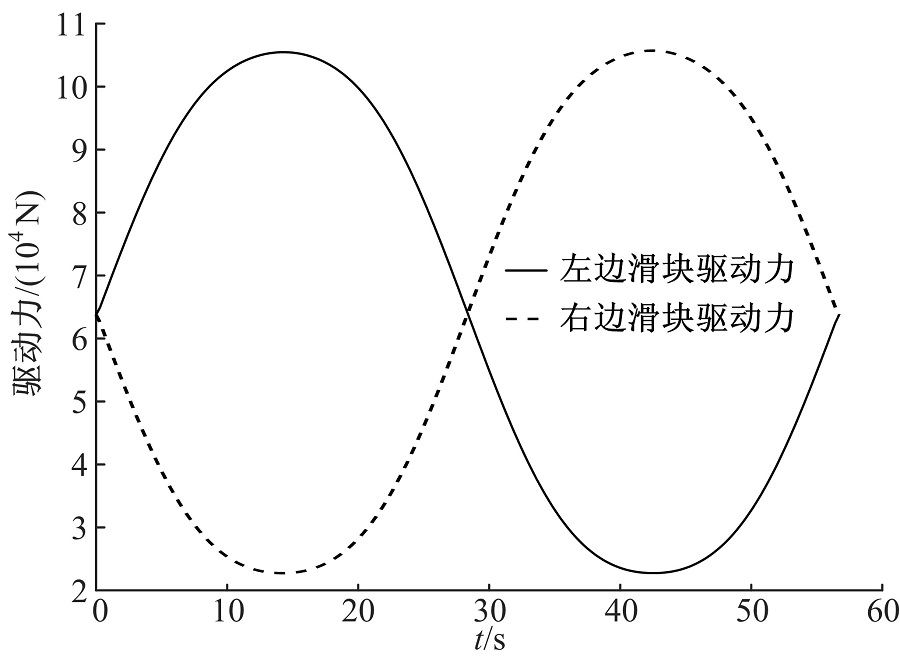 | 图4 非冗余并联机构驱动力Fig.4 Driving force of non-redundant parallel mechanism |
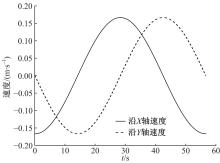
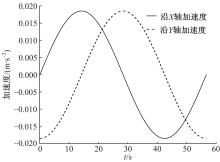
基于式(27)给出的加速度评价指标, 分别对冗余并联机构和其对应的非冗余并联机构在相同工作空间内的加速度性能进行仿真。图5和图6给出了并联机构沿半径为1.5 m的圆形轨迹运动时的速度和加速度, 可以看出在整个运动过程中
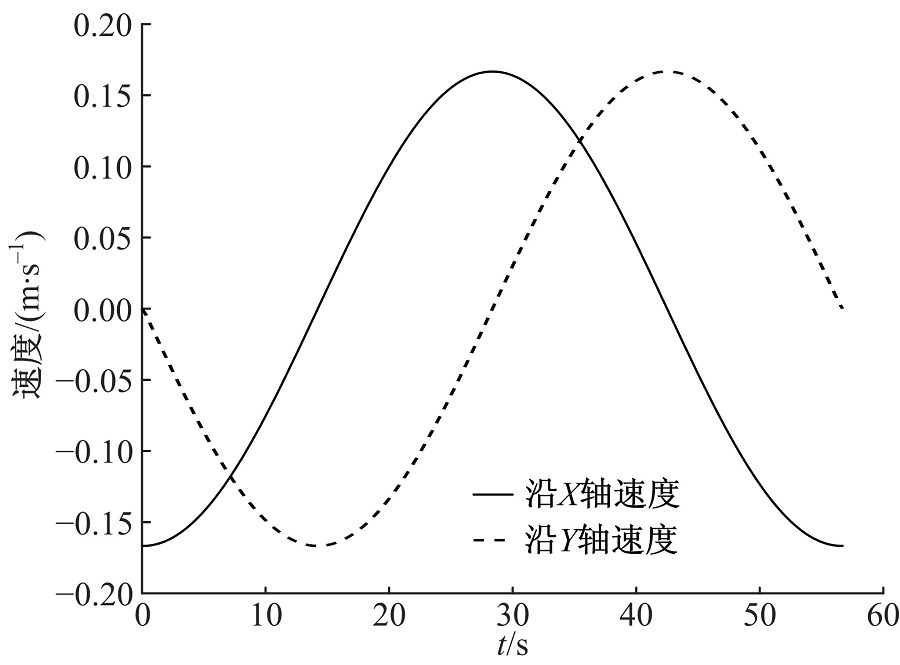 | 图5 动平台质心沿X、Y轴速度曲线Fig.5 Velocity curves of moving platform in X and Y axis |
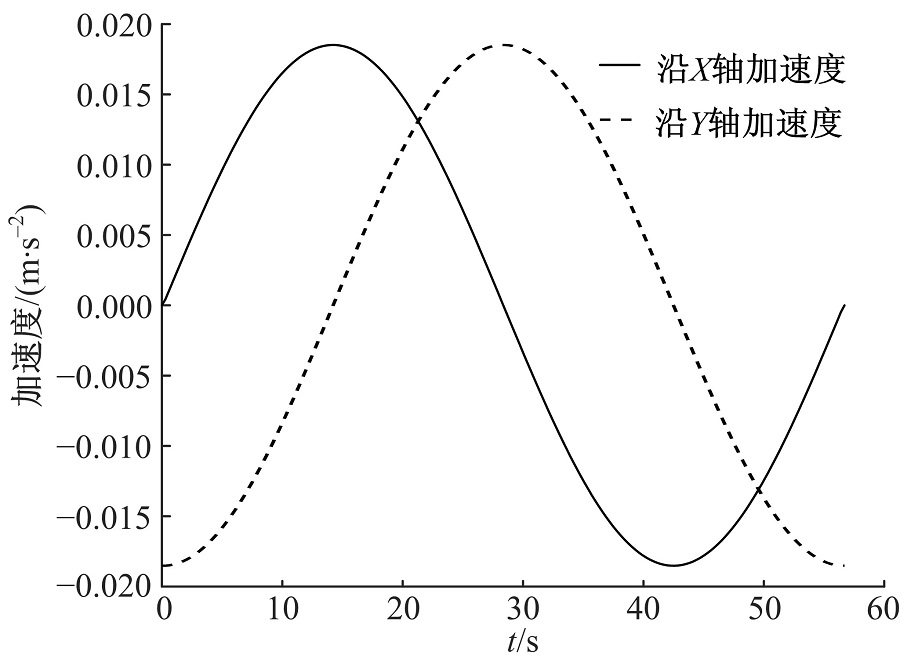 | 图6 动平台质心沿X、Y轴加速度曲线Fig.6 Acceleration curves of moving platform in X and Y axis |
图7为冗余与非冗余机构的动力学性能对比, 可以看出该冗余并联机构的加速性能关于
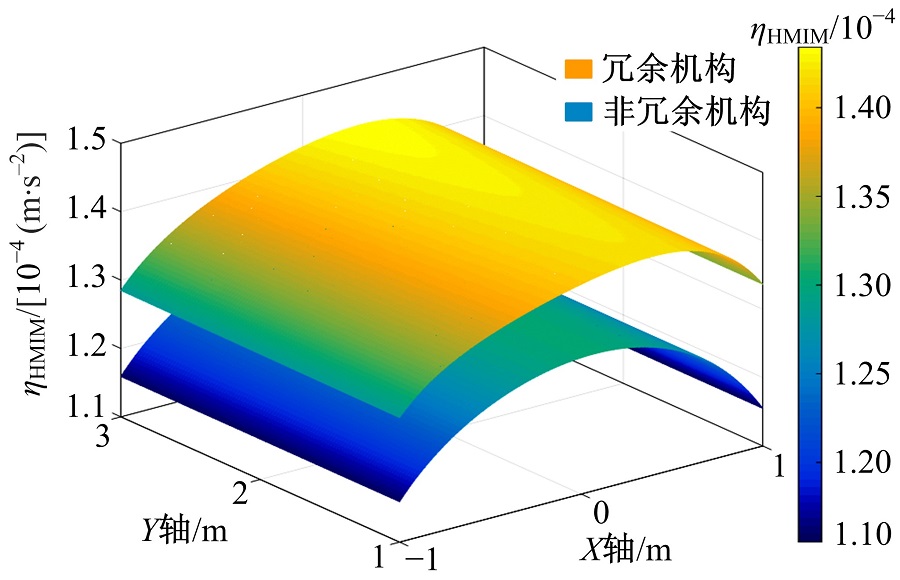 | 图7 冗余与非冗余机构的动力学性能对比Fig.7 Dynamic performances of redundant parallel mechanism and non-redundant parallel mechanism |
本文提出了一种适合重载加工的2自由度龙门式驱动冗余并联机构, 该机构采用冗余驱动方式, 具有高刚度、低惯量等特点。利用虚功原理建立了系统的动力学模型, 并构造了并联机构加速性能评价指标。通过仿真研究表明, 在相同运动条件下, 冗余并联机构的驱动力小于对应的非冗余并联机构的驱动力, 从而降低了运动过程中驱动力的波动, 提高了动态特性。此外, 该冗余重型并联机构的加速性能优于其对应的非冗余并联机构的加速能力, 具有较高的工作效率。本文研究结果对其他重型并联机构的构型设计以及加速度评价具有重要的参考价值。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|