Journal of Jilin University(Engineering and Technology Edition) ›› 2019, Vol. 49 ›› Issue (3): 727-735.doi: 10.13229/j.cnki.jdxbgxb20171257
Previous Articles Next Articles
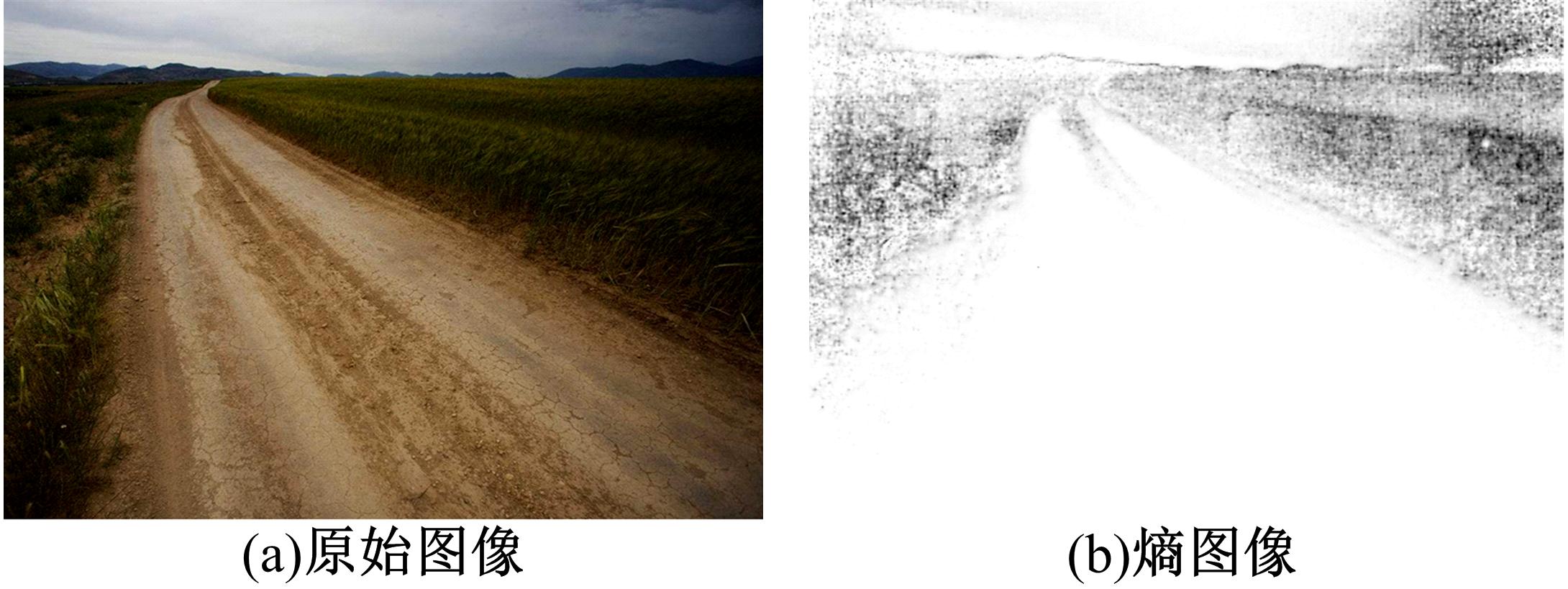
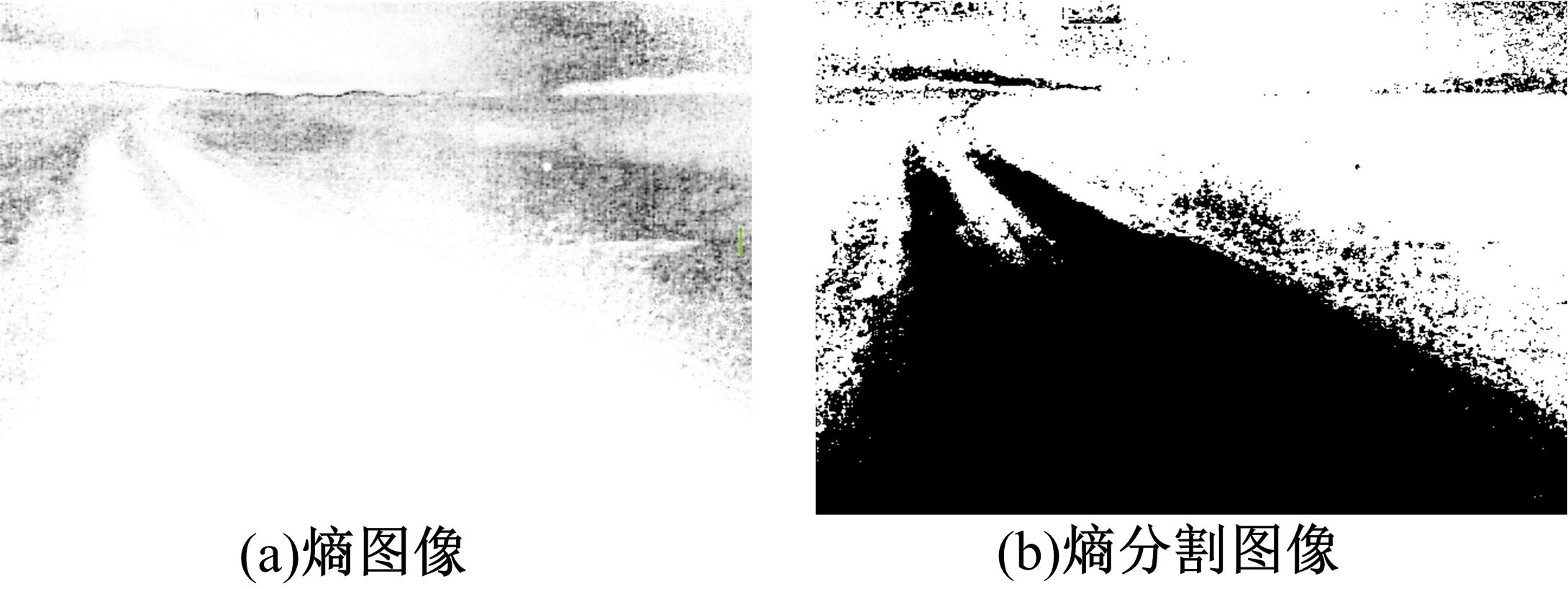
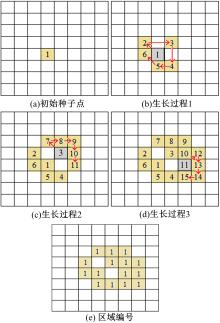
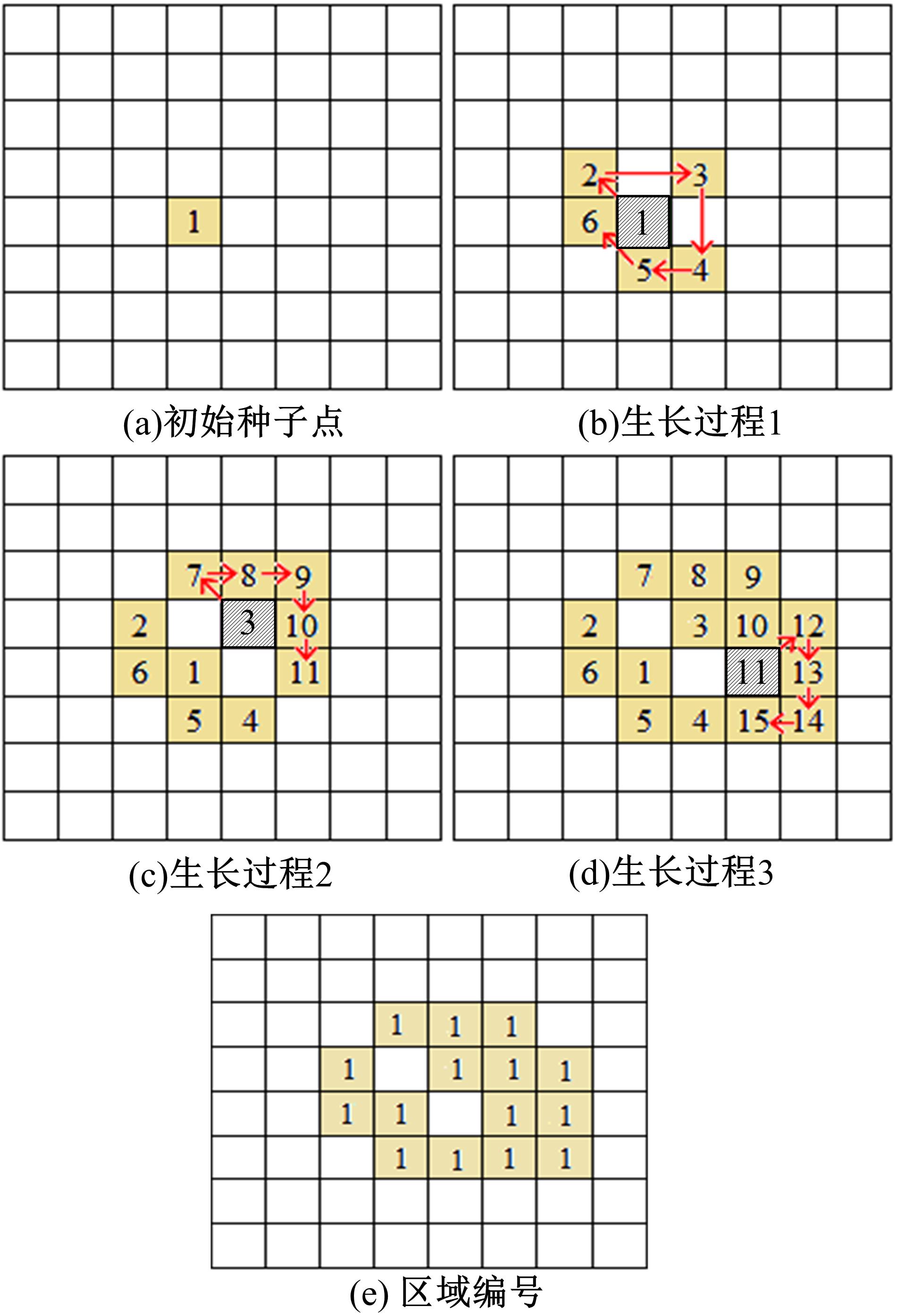
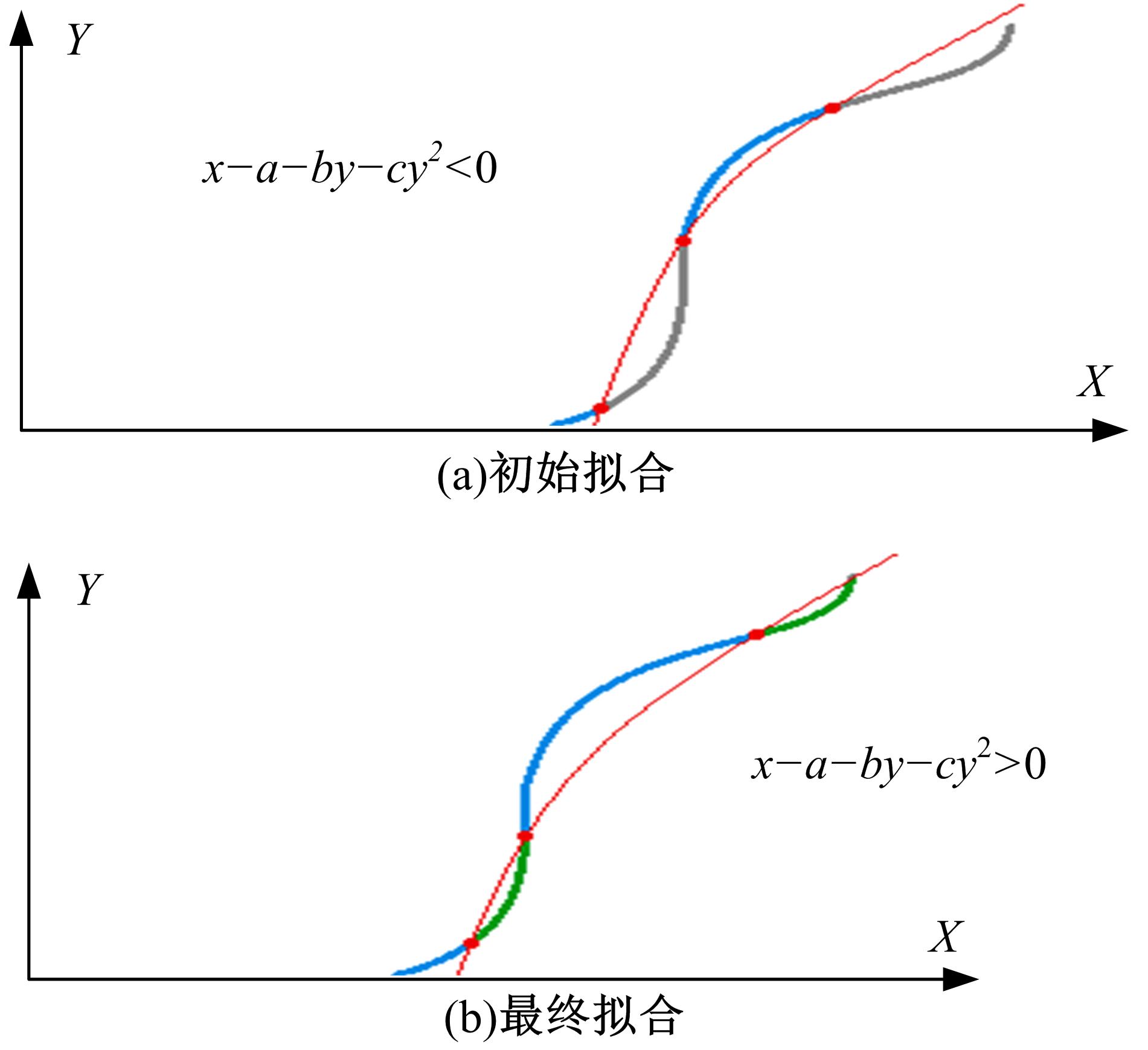
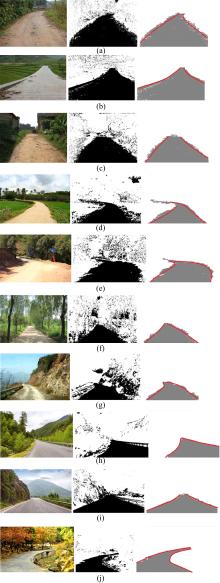
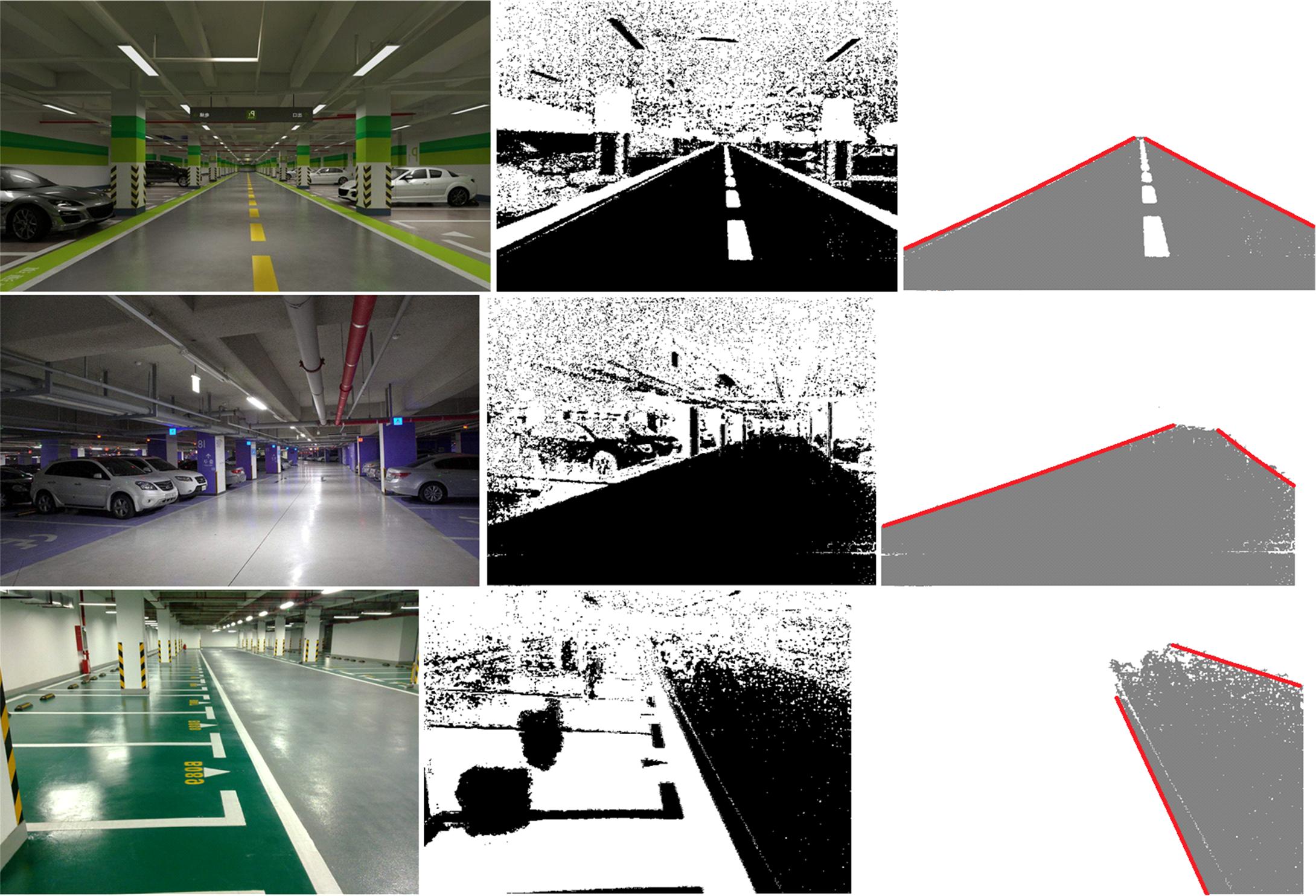
Unstructured road detection method based on RGB entropy and improved region growing
Hua⁃yue WU( ),Li⁃ren DUAN
),Li⁃ren DUAN
- School of Information Engineering, Chang′an University, Xi′an 710064, China
CLC Number:
- U495




| 1 | 熊思, 李磊民, 黄玉清. 基于小波变换和K⁃means的非结构化道路检测[J]. 计算机工程, 2014, 40(2): 158⁃161. |
| XiongSi, LiLei⁃min, HuangYu⁃qing. Unstructured road detection based on wavelet transform and K⁃means[J]. Computer Engineering, 2014, 40(2): 158⁃161. | |
| 2 | 郭秋梅, 黄玉清. 基于二维熵和轮廓特征的非结构化道路检测[J]. 计算机应用, 2013, 33(7): 2005⁃2008. |
| GuoQiu⁃mei, HuangYu⁃qing. Unstructured road detection based on two⁃dimensional entropy and contour features[J]. Journal of Computer Applications, 2013, 33(7): 2005⁃2008. | |
| 3 | WangY, TeohE K, ShenD G. Lane detection and tracking using B⁃Snake[J]. Image and Vision Computing, 2004, 22(4): 269⁃280. |
| 4 | JeongH, OhY, ParkJ H, et al. Vision⁃based adaptive and recursive tracking of unpaved roads[J]. Pattern Recognition Letters, 2002, 23(1⁃3): 73⁃82. |
| 5 | 周植宇, 杨明, 薛林继, 等. 一种基于高斯核支持向量机的非结构化道路环境植被检测方法[J]. 机器人, 2015, 37(6): 702⁃707. |
| ZhouZhi⁃yu, YangMing, XueLin⁃ji, et al. Vegetation detection approach based on gaussian kernel support vector machine in unstructured road environment[J]. Robot, 2015, 37(6): 702⁃707. | |
| 6 | 柏猛, 李敏花. 基于图模型的道路检测方法[J]. 模式识别与人工智能, 2014, 27(7): 655⁃662. |
| BaiMeng, LiMin⁃hua. Road detection method based on graph model[J]. Pattern Recognition and Artificial Intelligence, 2014, 27(7): 655⁃662. | |
| 7 | 龚建伟, 叶春兰, 姜岩, 等. 多层感知器自监督在线学习非结构化道路识别[J]. 北京理工大学学报, 2014, 34(3): 261⁃266. |
| GongJian⁃wei, YeChun⁃lan, JiangYan, et al. Unstructured road recognition using self⁃supervised multilayer perceptron online learning algorithm[J]. Transactions of Beijing Institute of Technology, 2014, 34(3): 261⁃266. | |
| 8 | ZhouS Y, GongJ W, XiongG M, et al. Road detection using support vector machine based on online learning and evaluation[C]∥IEEE Intelligent Vehicles Symposium, San Diego, CA, USA, 2010: 256⁃261. |
| 9 | 兰丽, 胡晓辉, 孙苗强. 一种基于灰关联和Sobel算子的完全非结构化道路边缘检测方法[J]. 湖南工程学院学报, 2013, 23(1): 42⁃44. |
| LanLi, HuXiao⁃hui, SunMiao⁃qiang. Completely unstructured road edge detection based on grey relation and sobel operator[J]. Journal of Hunan Institute of Engineering, 2013, 23(1): 42⁃44. | |
| 10 | 吕艳鹏, 潘玉田. 基于MATLAB图像处理的非结构化道路识别[J]. 机械工程与自动化, 2014, 43(2): 32⁃33. |
| LvYan⁃peng, PanYu⁃tian. Unstructured road detection based on MATLAB image processing[J]. Mechanical Engineering & Automation, 2014, 43(2): 32⁃33. | |
| 11 | 李进, 陈杰平, 易克传, 等. 基于特征融合的视觉导航智能车辆的车道识别[J]. 汽车工程, 2015, 37(5): 587⁃592. |
| LiJin, ChenJie⁃ping, YiKe⁃chuan, et al. Lane identification of vision⁃guided intelligent vehicle based on feature fusion[J]. Automotive Engineering, 2015, 37(5): 587⁃592. | |
| 12 | 许华荣, 王晓栋, 方遒. 基于B样条曲线模型的结构化道路检测算法[J]. 自动化学报, 2011, 37(3): 270⁃275. |
| XuHua⁃rong, WangXiao⁃dong, FangQiu. Structure road detection algorithm based on B⁃spline curve model[J]. Acta Automatica Sinica, 2011, 37(3): 270⁃275. | |
| 13 | ChiuK Y, LinS F. Lane detection using color⁃based segmentation[C]∥IEEE Intelligent Vehicles Symposium, Las Vegas, USA, 2005: 706⁃711. |
| 14 | 颜飞,周长久,田彦涛. 用于目标定位的图像边缘点检测算法[J]. 吉林大学学报:工学版,2016,46(6):2103-2110. |
| Yanfei,zhouchang-jiu,tianyan-tao. Image edge points detection algorithm for object localization[J]. Journal of Jilin University(Engineering and Technology Edition), 2016,46(6):2103-2110. | |
| 15 | 肖明尧,李雄飞,张小利,等. 基于多尺度的区域生长的图像分割算法[J]. 吉林大学学报:工学版,2017,47(5):1591-1597. |
| XiaoMing-yao,LiXiong-fei,ZhangXiao-li,et al. Medical image segmentation algorithm based on multi-scale region growing[J]. Journal of Jilin University(Engineering and Technology Edition), 2017,47(5):1591-1597. | |
| 16 | 武历颖, 余强. 一种快速准确非结构化道路检测方法研究[J]. 计算机仿真, 2016, 33(9): 174⁃178. |
| WuLi⁃ying, YuQiang. A fast and accurate detection method of unstructured road[J]. Computer Simulation, 2016, 33(9): 174⁃178. |
| [1] | TAO Tao, XU Hong-ze. Immersion and invariance fault-tolerant control for a class high-speed trains [J]. 吉林大学学报(工学版), 2015, 45(2): 554-561. |
|